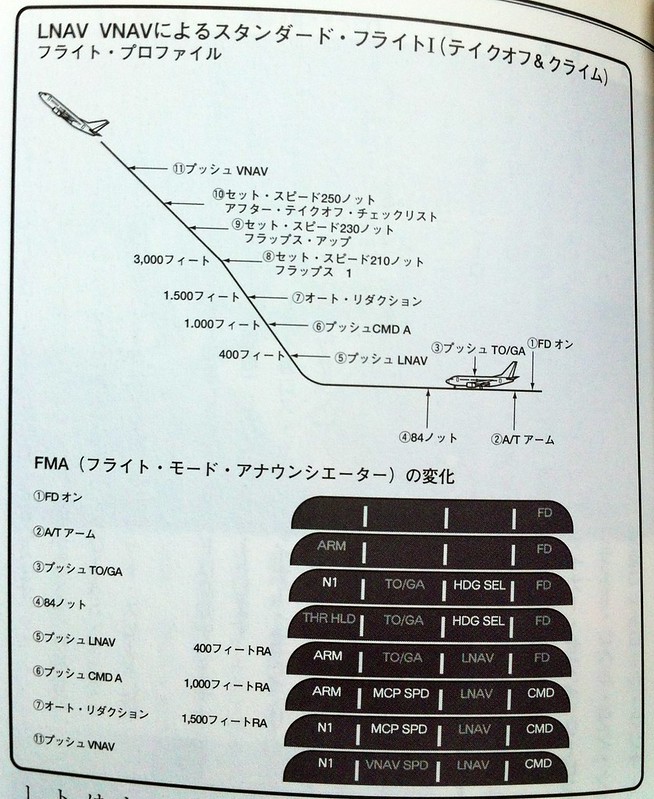
飞机继续不断上升,无线电高度计上的数字超过了400英尺(以客机驾驶手册一书中737-500为例),
这时可以打开水平导航LNAV模式了,机长指示副驾驶按下MCP上的LNAV按钮,

于是PFD上的左上方模式栏里方位设定由HDG SEL变为LNAV,飞行模式进入下图中的第5阶段。
LNAV 是Lateral navigation 的简称,即水平导航,可以控制飞机按照事先设定好的航路在水平面上自动飞行。
LNAV的原理首先是利用惯性导航装置IRS,即使用飞机上的激光陀螺,根据多普勒效应得到飞机的加速度,
对时间积分后可以计算出飞机当前的速度和位置,再根据地面上的无线电导航设备(VOR,DME,ILS/DME,VORTAC,TACAN等)或者GPS得到的位置数据,
飞行管理计算机FMC把所有这些数据连续的合成起来,也就是FMC把IRS的误差通过各种导航设备的数据不断进行修正,正确控制飞机在应有的航线上飞行。
MCP上LNAV键被按下后,PFD上的飞行指令条FD就会根据FMC的指示,按照事先设好的航路对飞行员进行导航。
飞行员只要按照FD操纵飞机,即使有侧风飞机也不会偏离航线。
这是因为FMC会根据天气计算出风向修正角WCA(Wind Correction Angle),WCA也会被集成到飞行指令条FD上,所以飞行员驾驶时只要专注于FD就可以了。
支 持 本 站: 捐赠服务器等运维费用,需要您的支持!
与此同时,油门控制模式也发生了变化,绿色的THR HLD变为了白色的ARM,
也就是说飞机升到400英尺,并且离地18秒以后,发动机自动推力锁定模式就被解除,
发动机推力进入随着爬升高度而自动减少的状态。
飞机高度超过事先决定好的机场对地高度(比如1000英尺)以后,飞行员就可以打开自动驾驶模式A/P。
737上有两台自动驾驶仪,左边的为A,右边的为B,一般来说机长会指示副驾驶使用左侧,按下MCP中右侧的A/P ENGAGE 部分的CMD A键,

于是飞行员的手就可以脱离操纵杆或操纵盘,飞机的各个舵面的控制就都交给计算机处理了。
这样PFD上的左上方模式栏里自动驾驶设定由FD变为绿色的CMD,同时俯仰控制部分的模式也从TO/GA
变为MCP SPD,飞行模式进入下图中的第6阶段。
MCP SPD意味着现在飞机的速度将由MCP上中央处的IAS/MACH旋钮来控制,
而飞行员将会根据飞行中不同阶段不断调整这个速度。
自动驾驶模式中,飞机忠实按照CDU中输入的航路,不断转弯向下一个航路点飞去。
超过气压高度1500英尺以后,推力模式自动从减推力起飞设定转变为爬升减推力,
飞机发动机的声音也比起刚才安静了一些。
PFD上的左上方模式栏里自动推力模式从白色的ARM变为绿色的N1模式,飞行模式进入下图中的第7阶段。
TOC: 目录
Next: ATC移交离场管制,进入VNAV模式
完
支 持 本 站: 捐赠服务器等运维费用,需要您的支持!
Bo Yu Wei
請問PFD上的高度單位是英尺嗎?
老眼昏花 回复给 Bo Yu Wei
是的!
Bo Yu Wei
可是為什麼倒數第二張圖是一萬英尺,速度卻只有110節?
老眼昏花 回复给 Bo Yu Wei
这图里应该表现的是目标高度10000feet,不是当前高度
Bo Yu Wei
哦!害我納悶一個下午
Bo Yu Wei
可是就算降落也不太可能設定到110節吧?
老眼昏花 回复给 Bo Yu Wei
这图是个示意图,我觉得数据应该是地面时的
老眼昏花 回复给 Bo Yu Wei
呵呵,图确实不太好,不好意思啊
Bo Yu Wei
不會啦!寫得出來就已經很了不起了!
老眼昏花 回复给 Bo Yu Wei
谢谢
其实很早以前写的东西,有很多不满意的地方,如果有机会很想重新写一遍呢……
CCHIMP
您好,
首先感謝您提供這麼詳細的資料,
我是新手, 想請問幾個自動駕駛遇到的問題:
1. 當我設定完新高度後, 按下ALT HLD, 但沒有即時改變,
改設定VERT SPEED(設很大), 並按下V/S後才快速改變,
是否是ALT HLD用法不對?
2. 當我設定速度加速 ex. 280->390時,
原本的高度設6000, 但它開始往上爬,
不再能維持在原本設定的高度, 並大幅超過6000,
且出現 "拐~拐~拐~" 的警報聲
降低速度後約低於350後才沒有警報聲.
也就是
速度設太高好像很容易衝高, 無法控制高度;
或者手動開太快也是, 且易有警報聲.
謝謝您~
老眼昏花 回复给 CCHIMP
您好,
1, ALT HLD(Altitude Hold)是用于高度维持的命令,并不是改变高度的
2, 390这个速度是有什么根据呢?
看一下“Rod Machado的地面飞行学校”里面对“飞机腾空的原理”介绍,
https://yinlei.org/x-plane10/web/viewer.html?file=doc/groundschool.pdf
猜想高速飞行造成升力升高, 与平飞时的重力平衡得到破坏,
于是飞机就进入爬升了吧。
CCHIMP
原來如此, 謝謝您的解說.