这时飞机离开了东京北关东区域管理中心,开始进入东北区域,以波音777-200的Air System 115航班为例,
起飞离地后经过16分钟,飞机此时到达了栃木県的那須地区,经过NZE VOR导航台,
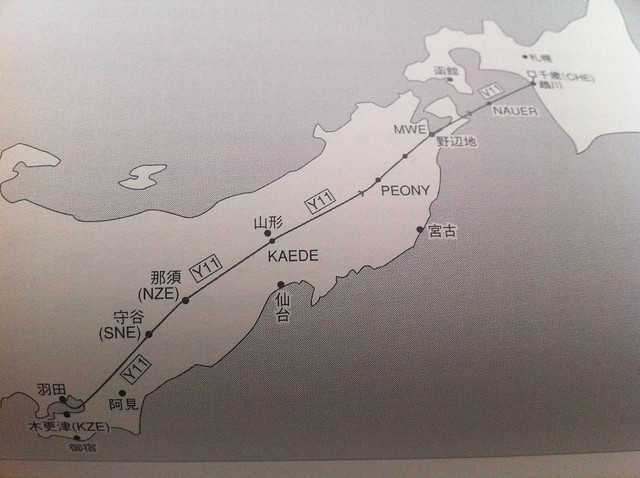
高度达到了39000英尺。
从上图可以看到,飞机从守谷SNE导航台处开始进入到R-NAV(区域导航,Area navigation)的 Y11航路,
并将沿该航路一路向北,一直延续到北海道的千岁导航台。
这时ATC又从空管接到新的联系,开始进行区域间移交:
"Air System 115,Contact Tokyo 118.9"
意思是
"Air System 115航班,请联系东京东北区域,频率为118.9",
飞行员复诵道
"Tokyo Control 118.9,Air System 115"
意思是
"收到,联系东京区域118.9,Air System 115航班"
支 持 本 站: 捐赠服务器等运维费用,需要您的支持!
然后飞行员把电台通信频率调至东北区调的118.900MHz,并联系道:
"Tokyo Control,Air System 115,Leaving 396 Climb 410"
意思是
"东京区域,这里是Air System 115,正在通过39600英尺,上升到41000英尺"
东北区调的空管员确认收到航班的信号,并回答
"Air System 115,Tokyo Control,Roger"
意思是
"Air System 115,这里是东京区域,收到"
飞机高度逐渐接近巡航高度,当达到距离预定高度还有900英尺时(以波音737为例),
驾驶舱内的高度警告信息系统会发出"咚"的提醒音,并且琥珀色的高度警告Altitude Alert信号灯亮起,
提醒飞行员飞机已经接近巡航高度了。
当高度达到距离预定高度还有300英尺时(以波音737为例),警告灯又会自动关灭。
与此类似的高度警告还会在平飞阶段飞机高度离开了预订高度300英尺时发出警告。
飞机接近巡航高度后,驾驶管理系统开始自动向下调整俯仰角,
位于油门附近的水平尾翼配平(STAB TRIM)控制盘再次自动向前方转动,飞机逐渐进入平飞姿态。

从PFD上可以看到右侧垂直速度条上渐渐接近到中央的0点,而左侧的速度条中的速度值越来越大。
当飞机高度达到距离预订高度还有100英尺时(以波音737为例),
PFD上的左上方FMA飞行模式栏里的俯仰姿态设定由VNAV SPD会变为绿色的高度获得ALT ACQ模式,
如下图中的16阶段所示。
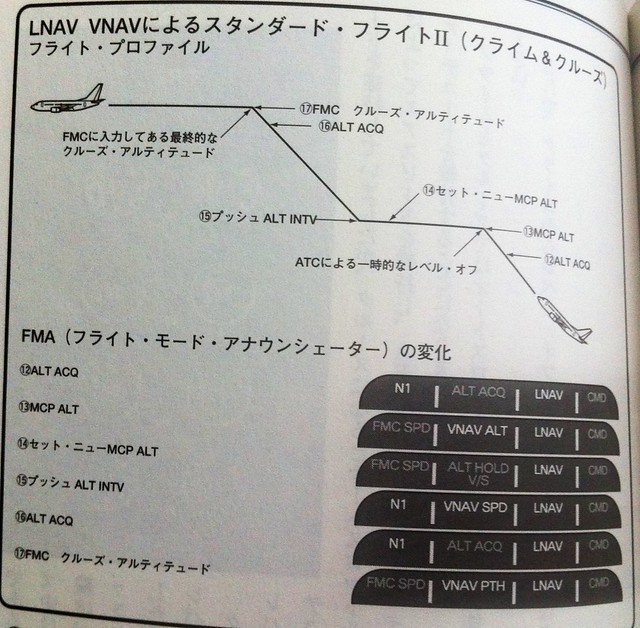
达到巡航高度后,飞机进入水平飞行,FMA飞行模式栏中的推力显示也会发生变化,由N1模式变化为FMC SPD模式,
俯仰姿态也由ALT ACQ变化为VNAV PTH模式,如上图中的17阶段所示。
当飞行速度增加到经济巡航速度后,发动机的油门也会自动被减小,飞机从爬升CLB模式正式进入到巡航CRZ模式。
飞行管理系统控制显示组件(FMS/CDU)中的页面的标题显示也会由经济爬升"ACT ECON CLB"变为巡航页面"ACT ECON CRZ",由飞行管理系统计算出的目标速度TGT SPD被显示出来。

上图为波音737的显示例,当前的目标速度为0.744马赫。
飞行中计算机根据各种传感器的输入,不断计算出当前的经济巡航速度,并不断调节自动油门系统的控制。
你应该还记得在前面我们提到过,在爬升过程中计算机是通过ADFS改变飞机的俯仰角来改变速度,而爬升时油门值是固定不变的。
而进入巡航水平飞行阶段后,高度的维持由ADFS来控制,而速度是由自动油门系统来控制了。
Prev: ATC移交区调,继续爬升
TOC: 目录
Next: 导航的基本知识
完
支 持 本 站: 捐赠服务器等运维费用,需要您的支持!
留言簿