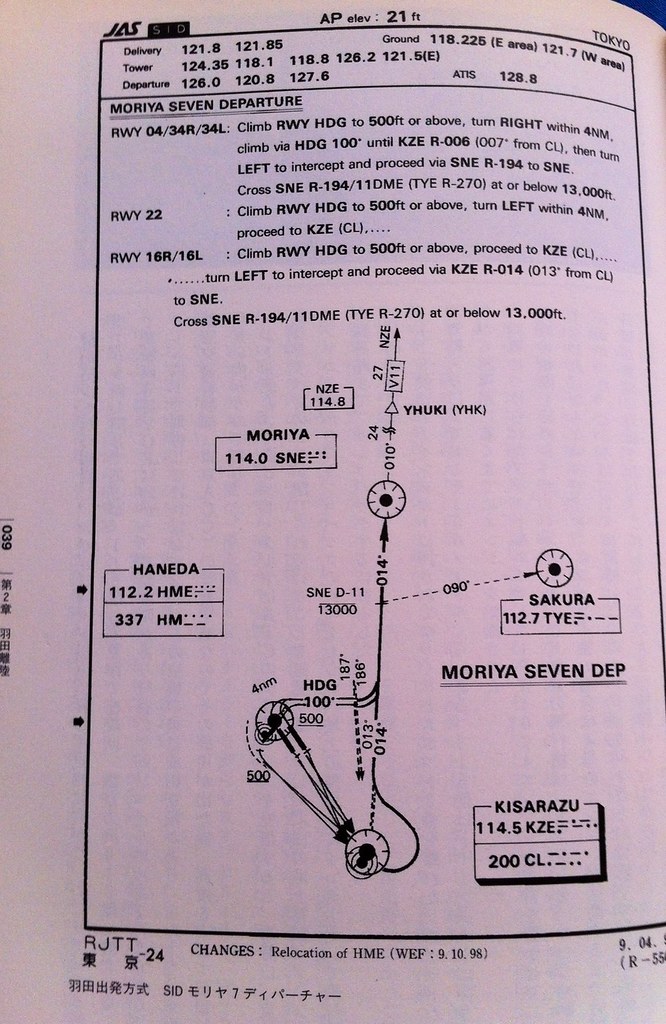
以AirSystem115航班为例,飞机按照羽田机场Moriya7号离场程序,先沿着跑道(16R)方向飞行到图右下角的KZE(KISARAZU木更津)导航点后,自动向左压坡度30度,拐弯以14度方向(基本接近与正北方向)向SNE(MORIYA守谷)导航点飞行。
此时塔台管制员确认飞机出发无误以后,指示飞行员联系出发管制:
"Air System 115,Contact Departure"
意思是
"Air System 115,请联系东京离场管制"
副驾驶复诵道
"Departure,Air System 115"
即
"联系东京离场管制,Air System 115"
后,把电台通信频率调至离场管制120.800MHz,并联系道:
"Tokyo Departure,Air System 115,Leaving 1800"
意思是
"东京离场管制,这里是Air System 115,通过1800英尺"
管制员回答道
"Air System 115,Tokyo Departure,Rader Contact,Turn Left Heading 020, Vector to Moriya, Climb and Maintain 210"
意思是说
"Air System 115,这里是东京离场管制,雷达看到,左转航向020,雷达引导到Moriya,上升并保持21000英尺"
副驾驶复诵:
"Left 020,Direct 210,Air System 115"
即
"左转航向020,保持21000英尺,Air System 115"。
支 持 本 站: 捐赠服务器等运维费用,需要您的支持!
根据上面的标准离场程序,我们知道在MORIYA前方11英里的地方有一个高度限制,
即必须在13000英尺(约3300米)高度以下飞行。
但是在这里离场管制员允许飞机员可以不经过KZE航路点,直接转弯飞向MORIYA并直接上升至21000英尺,也许是这天流量小的缘故吧。
对于航空公司来说这既节约时间又节省燃油,实在在好不过。
因此飞行员就在MCP上把航向设定旋钮转到020处。
现在飞机的速度处于MCP SPD模式,所以飞行员需要不断加大速度指示,并不断把放下的襟翼收起来。
比如以前文的737-500的为例,起飞是襟翼为5度,那么飞行员就可以先收起到1度Flap1。
Flap1是的速度条件为V2+15节以上,而现在爬升速度已经达到V2+20节,所以收起到1度是没有问题的。
同时起飞后程序也开始被执行,自动减速档从RTO关至OFF,

起落架档也移到中间位置的OFF档(从上至下分别为UP/OFF/ON),发动机起动开关也从CONT设至OFF档。
速度继续增加,这是把襟翼全部收起也没有问题了。737-500的襟翼机动速度在UP状态时为210节,在190节左右时机长指示副驾驶Flap UP,这样前后缘襟翼全部收入到机翼之中,飞机处于空气阻力最小的状态了。
机长再次在MCP上把速度升高到250节,并指示副驾驶起飞后检查单,
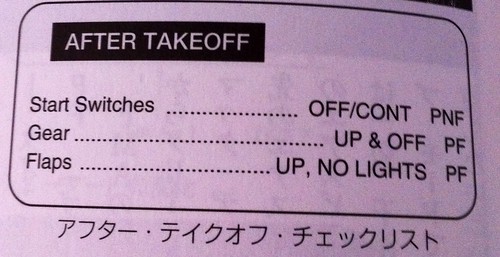
发动机启动开关关上,起落架收好,襟翼收好的几项。
检查完毕后,机长就开始起动VNAV模式。VNAV是垂直导航Virtical Navigation的简称,FMC飞行管理计算机根据机体的最佳经济速度(ECON SPD)计算出飞机的爬升,水平巡航,下降时垂直方向升降速度,并在FD上显示出来。最佳经济速度是指飞行时间和燃料消费的关系中最为经济的飞行速度。一般来说速度越快飞行时间越短但是耗燃料,速度慢一些油耗好一些但飞行时间就越长。计算机可以通过速度和油耗数值的各种组合中算出单位时间内既省油既省时间的速度,并使用这个速度进行爬升巡航和下降。现代喷气式客机的发动机动力强劲,一般飞机的爬升率都达到700-800米/分,因此对于10000米的巡航目标高度来说,从起飞开始只要15分钟左右就可以了。

按下VNAV键后,PFD上的左上方模式栏里俯仰设定由MCP SPD变为绿色的VNAV SPD,飞行模式进入下图中的第11阶段。
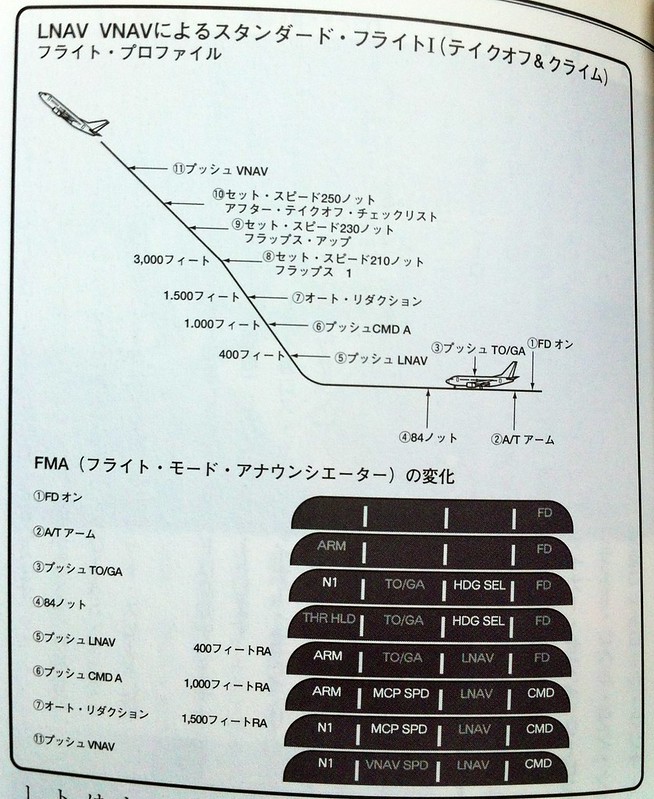
这时MCP中的IAS/MACH中的数字也消失,飞机的速度完全进入FMC控制管理阶段。
如果由于某些原因,比如交通管制进行飞机间间隔调整要求飞行员需要调整飞机的速度,
可以按下VNAV键下方的速度干预 SPD INTV(speed intervention)键,这样即使在VNAV状态下,
ISA/MACH也可以被激活,飞行员于是可以输入某临时速度使飞机按照ISA/MACH指定的速度飞行。
当临时的速度调节完成后,飞行员可以再次按下SPD INTV键,ISA/MACH的显示消失,
飞机速度再次由飞行管理计算机FMC所控制。
Prev: 打开自动驾驶模式
TOC: 目录
Next: ATC移交区调,继续爬升
完
支 持 本 站: 捐赠服务器等运维费用,需要您的支持!
留言簿