在5.6节中总结了由空中管制员执行雷达引导时的对话,下面把进场和进近过程中飞行员的具体操作总结一下。
当管制发出航向指示,如"Air System 115,Turn Left Heading 040",
即要求飞机左转航向至40度方位角。
飞行员会调节模式控制面板MCP(Mode Control Panel)上的航向HEADING旋钮(参见下面波音737的MCP示意图),

把显示器内的数据拨到040处。然后把旋钮下方的HDG SEL电门按下,
此时飞行管理系统FMA模式会就会发生变化,由原来的水平导航LNAV变为航向选择HDG SEL模式。
这一变化可以参见下图的FMA(Flight mode annunciation)飞行方式信号器的状态转化图,
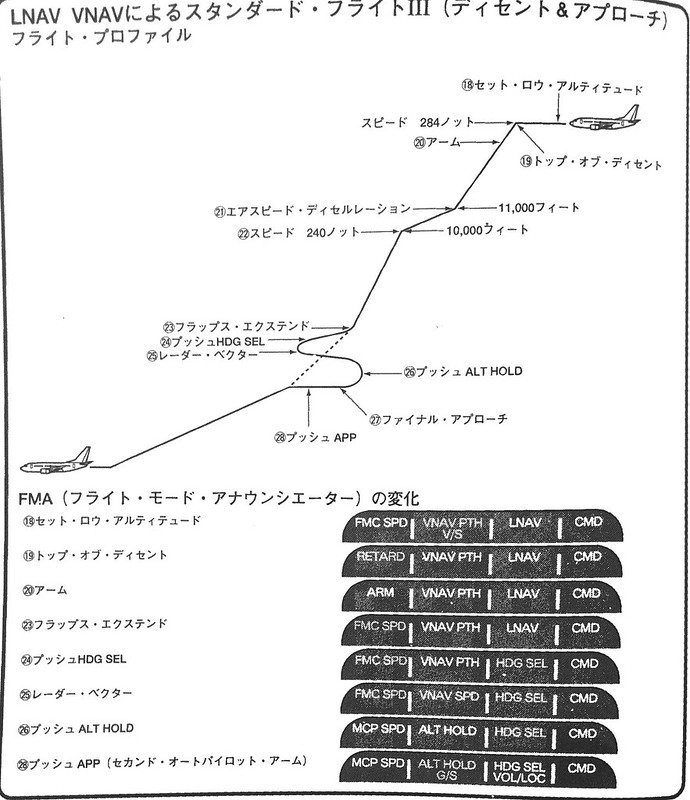
在23的飞行状态中,按下HDG SEL后,水平方向的控制就转为24的航向选择状态,
因此航向的控制就不由飞行管理计算机,而是由飞行员来亲自手动管理了。
但是要知道MCP只是管理了飞机的飞行方向,具体的转弯动作还是要靠计算机来自动控制舵面的调整,
一般来说标准的转弯需要飞机横滚30度,(不是只是动一下垂直尾翼处的方向舵啊)
利用左右副翼产生的升力差使机身左右倾斜,达到转弯的目的。
比如想左转弯时,左侧副翼向上抬起,右侧副翼放下,因此右侧机翼产生的升力就会变大,
而左侧升力变小,两侧的升力不平衡,因此飞机机体就会向左方倾斜,开始向左转弯。

当机首方向逐渐接近目的航向,计算机又会调整副翼逐渐减少倾斜度,
直至到达040度航向(北东方向)时刚好使飞机达到平飞状态。
支 持 本 站: 捐赠服务器等运维费用,需要您的支持!
由于开始了雷达引导,所以飞行员也开始关闭垂直高度导航VNAV模式,
启动手动高度控制模式。比如现在飞机处于4000英尺高度平飞状态,
那么飞行员按下高度ALTITUDE旋钮下方的ALT HLD电门,使飞机保持当前的高度。
相应的FMA飞行方式信号也开始转换,自动油门模式由FMC SPD进入MCP SPD,
同时俯仰模式由VNAV ALT进入ALT HOLD模式。
这一变化分别表现在上面FMA状态转化图的第25和26项上。
这样飞机的高度控制也脱离了FMC,变为由飞行员在MCP上直接控制了。
自动油门模式由FMC SPD进入MCP SPD后,
之前一直没有显示的MCP上的速度指示器IAS/MACH就会亮起,
当前的飞机空速会被显示出来。
如果不做调整的话,计算机将自动调整油门,以维持这个速度继续飞行。
飞行员会根据标准仪表进场程序和标准仪表进近程序的要求调整速度,
并根据需要适当地放下襟翼,同时控制空速不超过机体强度限制的襟翼机动速度。
根据手册中的规定,襟翼机动速度是以在5.7节提到的VREF基准速度为基准,
并随重量变化,按照下面的襟翼计划保证飞机速度不至低于失速速度。
以波音737为例,VREF采用襟翼位置40时的襟翼机动速度为:
襟翼位置1 时的襟翼机动速度VREF+50节
襟翼位置5 时的襟翼机动速度VREF+30节
襟翼位置10 时的襟翼机动速度VREF+30节
襟翼位置15 时的襟翼机动速度VREF+20节
襟翼位置25 时的襟翼机动速度VREF+10节
襟翼位置30 时的襟翼机动速度VREF30
襟翼位置40 时的襟翼机动速度VREF40
假设某航班波音737-500在襟翼1的状态下,机动速度为190节,
飞行员就会旋转速度指示器下方的旋钮,设置显示值到190。
当管制发出高度指示,如" Air System 115,Descent and Maintain 3000",
即要求飞机下降到3000英尺高度。
因此飞行员就会再次调整高度ALTITUDE旋钮,
把高度调整到3000英尺处,并按下模式选择的高度调整LVL CHG电门。
计算机再次调整自动油门,FMA的油门模式由MCP SPD变为RETARD(减速),
油门收到慢车状态,机首向下倾斜开始下降,
与此同时俯仰控制模式由ALT HOLD变为MCP SPD,
因此计算机控制仰角使飞机维持在190节的速度上继续飞行。
在高度接近到离目标值还有100英尺时,FMA的俯仰控制由MCP SPD变化为ALT ACQ,
并继续下降,并且在达到目标高度时,自动油门自动向前推动,
使飞机高度维持在3000英尺,于是FMA的俯仰控制再次变化,
由ALT ACQ变为ALT HOLD,即高度维持状态。
关于高度还有一点,在飞机降到2500英尺以下后,
机上的无线电高度计就会自动启动,其数据显示在PFD中央下方。
无线电高度计是根据无线电波反射原理测量航空器距地面真实高度的机载无线电设备。
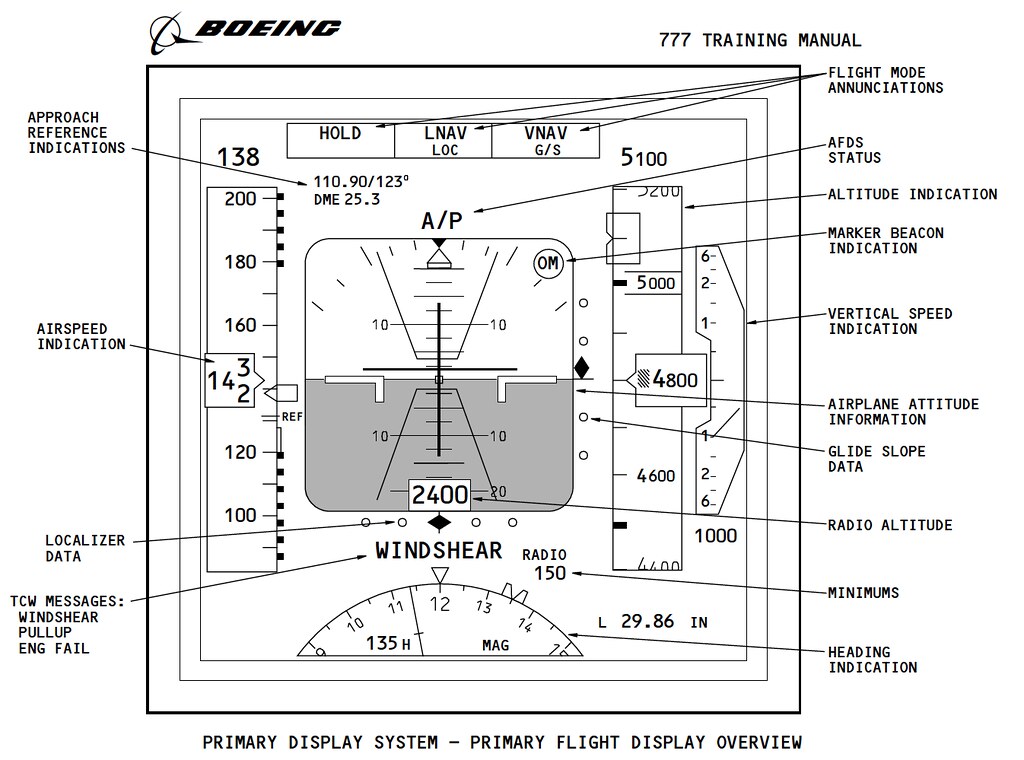
可以参看上图波音777的训练手册中的解说,
RADIO ALTITUDE处的箭头就指向无线电高度计的显示2400英尺。
飞机逐渐开始接近最后进近定位点FAF,飞行员开始进行ILS盲降准备了。
完
Prev: 下降过程中的操作小结
TOC: 目录
Next: 降落辅助系统
留言簿