在X-Plane 11.11r2上用ATC功能飞了一小圈,
感觉XP11的航空管制这部分,
除了巡航阶段的导航没有以外,自动化程度比以前提高很多,甚是推荐。
下面简单把拷屏贴出来介绍一下。
点击右上角的ATC图标,启动空中交通管制窗口,
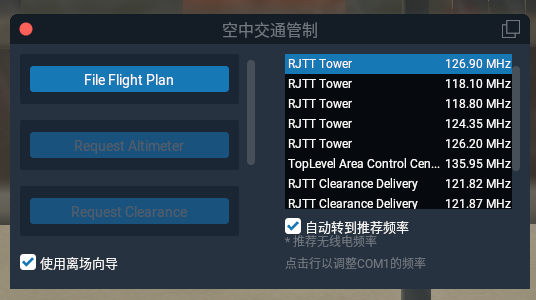
因为还没有输入飞行计划,所以可以看到File Flight Plan按钮。
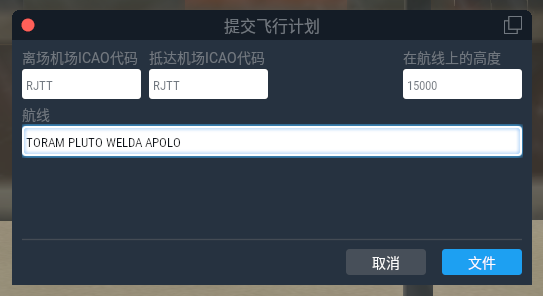
点击File Flight Plan,弹出来一个空的提交飞行计划窗口,
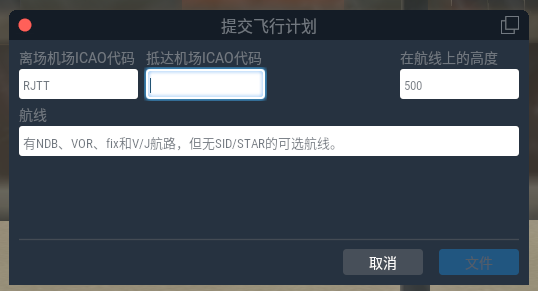
打算就在羽田附近转个圈,
所以Garmin D2™Charlie钛金航空表和Garmin Pilot的连接里面的copy一下,
支 持 本 站: 捐赠服务器等运维费用,需要您的支持!
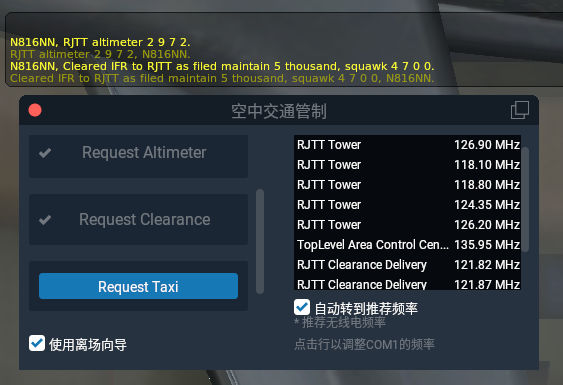
提交之后可以看到系统自动的切换到Clearance请求放行,
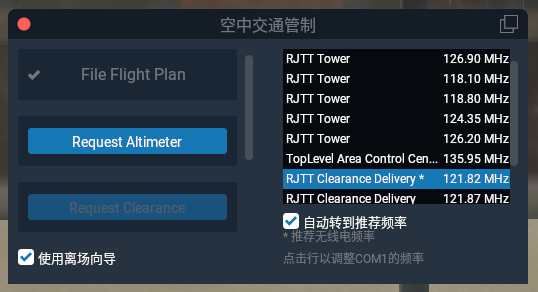
这个功能真是太赞了,不用自己去调频率,
在繁忙的飞行中省心很多。
先问一下高度计校正,

然后复读一下,

基本上没怎么等,飞行计划就被批准了,

复读一下,
能够看到Request Taxi按钮出现了。
那么就开始滑走吧,申请一下,
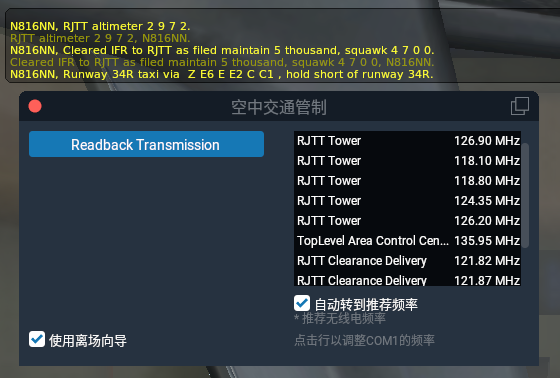
马上就得到地面路线的回复,反应还真快。
复读一下,走起。

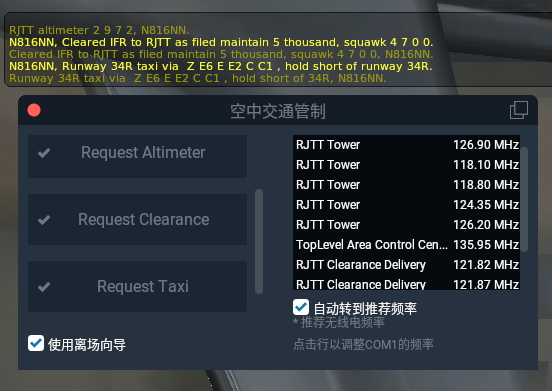
一路往南,

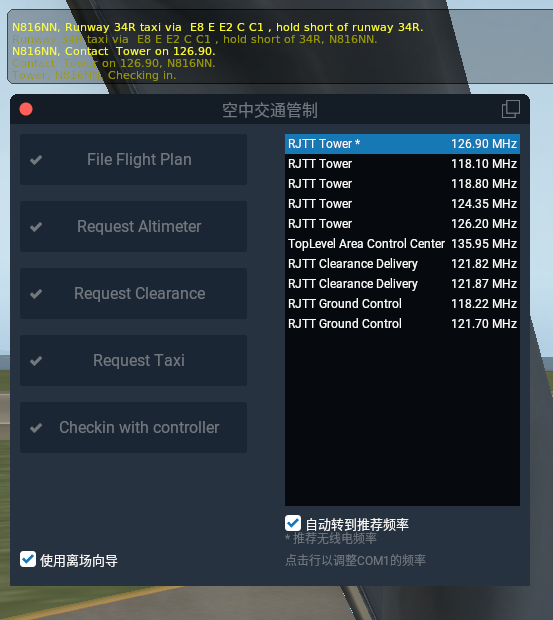
然后左转,走到34R跑道头。

管制员提示我们从地面管制频率交接到塔台,

老老实实复读,
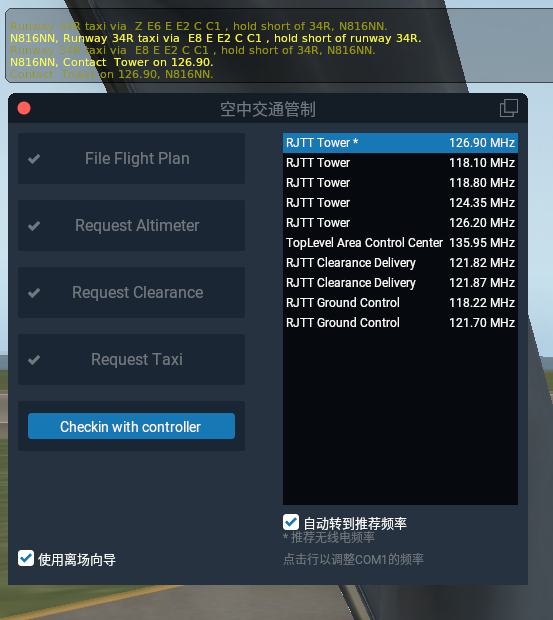
可以看到系统又非常贴心的自动把频率切换过去了。
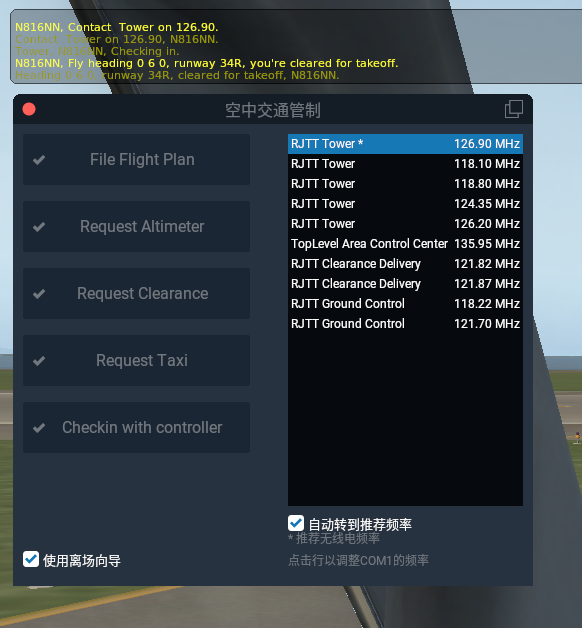
Checkin联系塔台,
马上拿到起飞许可!

复读后马上起飞。
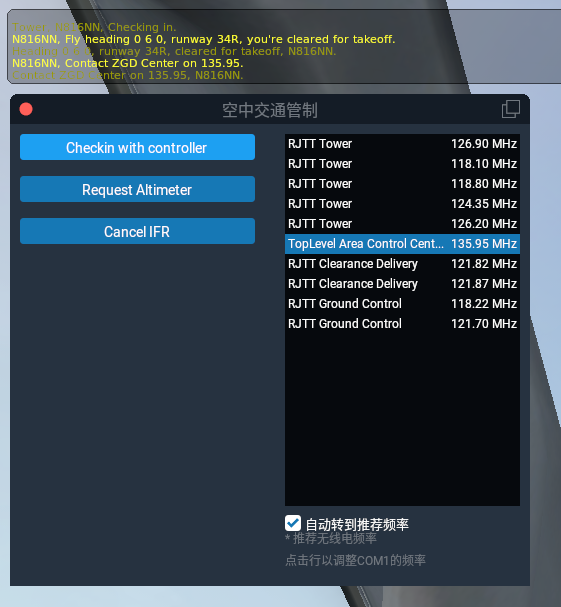
离地不久就得到切换到区域管制的信息,
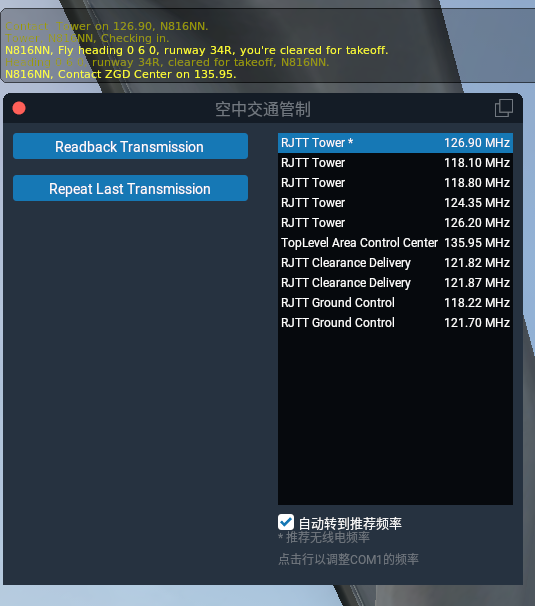
接下来复读,联系区域空管,
拿到HDG 220的指示。

接下来又得到新的指示,这一段飞行感觉还不错,

马上复读。
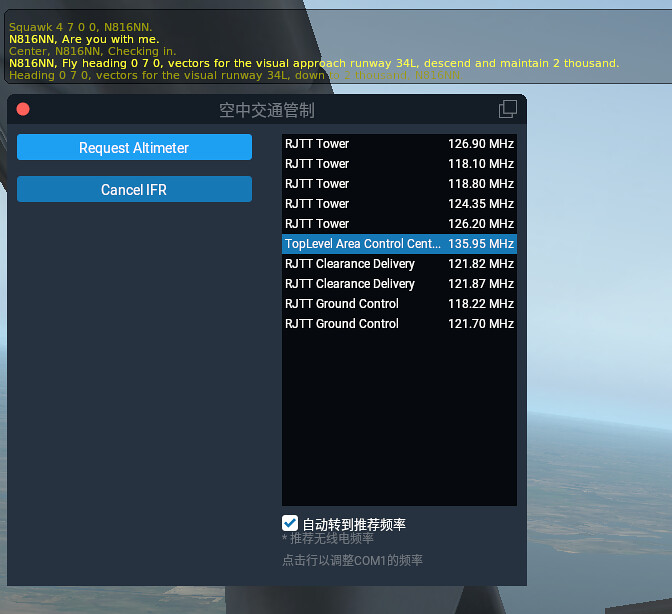
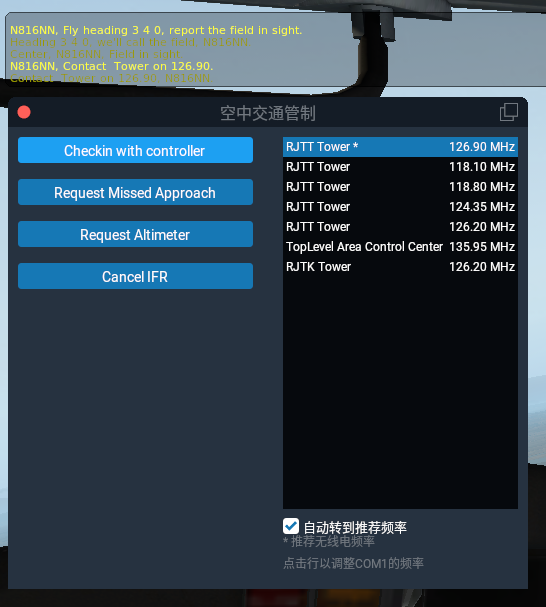
转了弯后又得到新的航向和高度指示,

再调过个头,前方机场和跑道已经能够隐隐约约看到了。
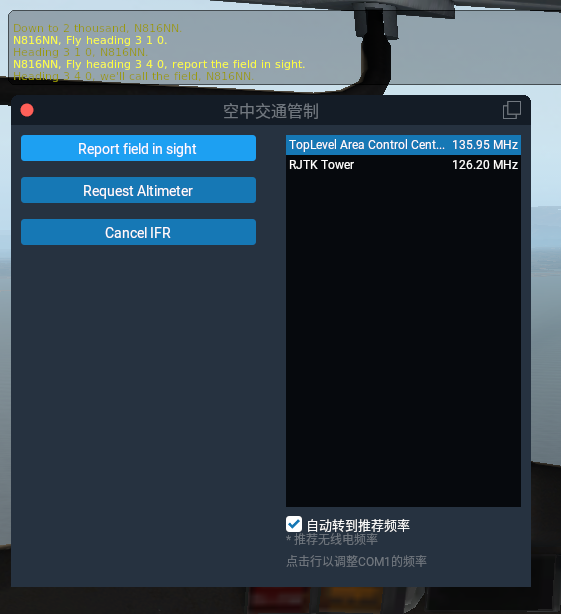
所以Report the field in sight,
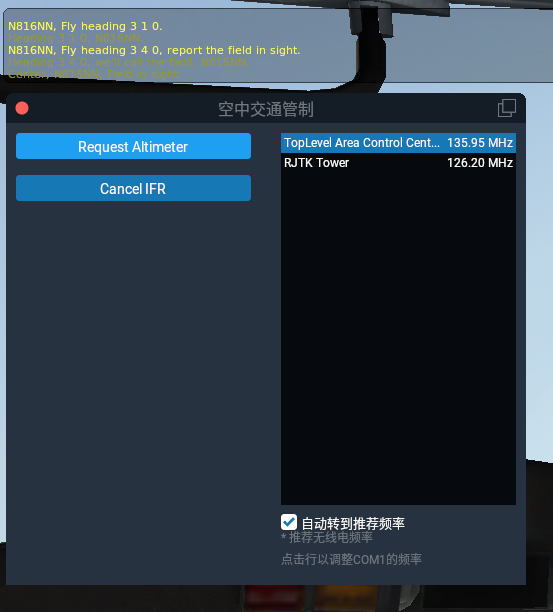
貌似一切都还顺利。
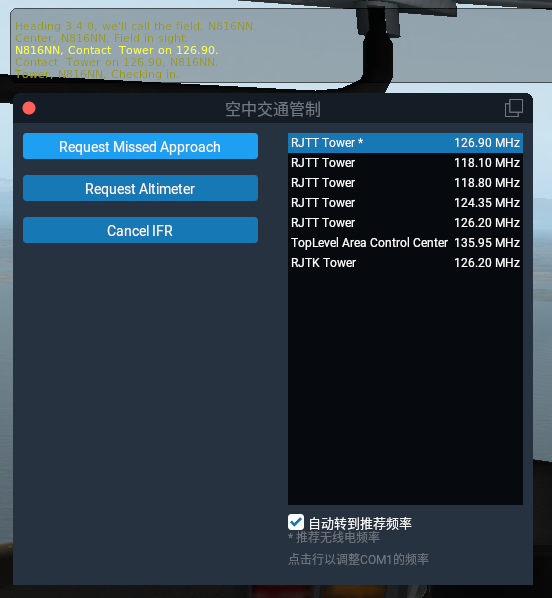
随着逐渐接近机场,联系塔台的指示来了,
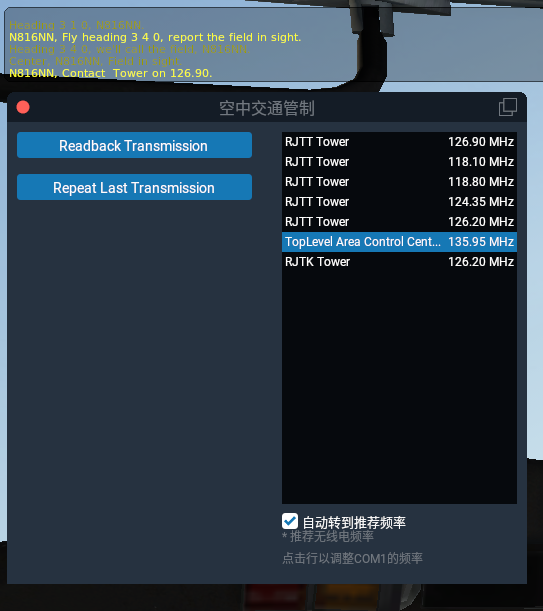
继续复读,
然后频率自动切到塔台,
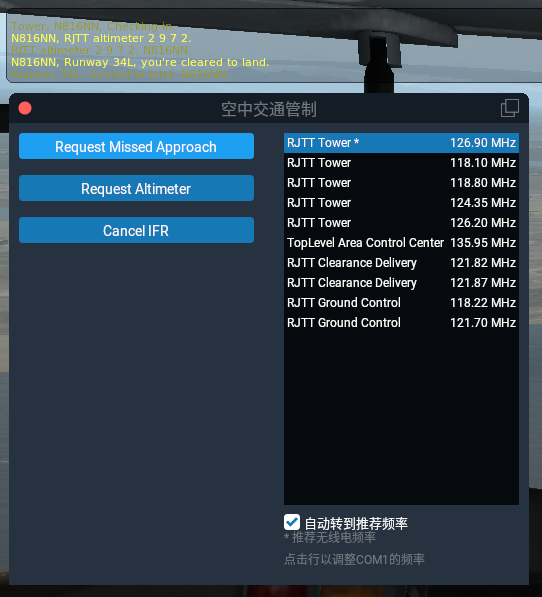
马上拿到cleared to land!

复读一下,准备降落。
landing这一块手忙脚乱的,当然没时间拷屏,
不过落地以后马上得到滑走路线,

复读以后一直走回廊桥,

貌似也不用切换到地面管制,倒是省事。

反正当飞机一接近廊桥,整个ATC就自动结束,
虽然管制模拟整体来说不是百分之一百完美,
但是我个人已经很满意了。
参考信息
空中交通管制ATC (Air Traffic Control) 基本知识 -1
空中交通管制ATC (Air Traffic Control) 基本知识 -2
Sam Sun
老眼昏花大師,您好
目前atc系統無法使用,有沒有被禁用的可能,如果平時就未依指示飛行?(如果有,可以如何解除)
老眼昏花 回复给 Sam Sun
不会的
Sam Sun
老眼昏花大師,您好
那就是軟體出問題了,目前暫時先退回xp10....xp11 atc依舊無法使用.....再不然...就是另外購買官版
Sam Sun
老眼昏花大師,您好
對於xp11,atc功能無法使用的情況,於昨晚終於了解了,只能說因為功能太強大,但使用到的頻率卻太少(正確的形容應該說從沒用過),所以對其各項功能不很了解,xp11有一項強大功能為當飛機在編隊飛行時(我們焦點都在如何編隊,當然也是要有默契的機友),而編隊飛行時彼此之間的互相通話功能,關鍵就在這裡,若setting飛機為編隊飛行,那麼在加入編隊的過程中,atc即會自動切換為編隊內的通話,也就是不再是跟空中管制對話(atc),此時,atc對話視窗便會轉為反灰階框,閃光bar(就是要輸入的是與編隊機緣的對話),而atc就會怎麼也出不來......這是無意間開啟的功能(但從沒用過),而造成的誤解了
老眼昏花 回复给 Sam Sun
哦,有意思,编队飞行是怎么玩的?我还没有用过呢。
Sam Sun
老眼昏花大師,您好
編隊飛行至少都要知道彼此的ip,於網路功能內加入彼此(添加一人編隊,如此便可透過xp11,機員間互相對話~~所以atc視窗就會不見)
老眼昏花 回复给 Sam Sun
以后有时间我也试试看,多谢你了!
changwee
大師您好,有如下問題,當我根據ATC指引的航向和高度飛行之後,可以目視機場的時候,要求report the field in sight。每當我report之後,接到塔台之後不允許降落,而是立馬接到區調,要求上高度重新飛五邊。根據ATC指引已經飛了4個多小時,也都是在繞圈圈,降落不了。求解這是為啥
老眼昏花 回复给 changwee
这个确实很奇怪啊,从来没有遇到过。。。
本场有没有AI机同时在飞行或者在机场内呢?
不知道是不是它们在捣乱;
或者你在飞行中暂停一下,并且重新提交一下飞行计划看看呢。
changwee 回复给 老眼昏花
有没有可能是我FMC没选择进场呢?
老眼昏花 回复给 changwee
应该没有关系
blove 回复给 changwee
我遇到过这个问题,应该是AI机在捣乱,或者有Bug误认为有AI机在跑道上,所以不允许降落。
老眼昏花 回复给 blove
果然不出所料,感谢你的留言!
Charles Washington
Dear Sir 您好
請教一個問題(此問題也捆擾很久)
ㄧ.
啟動ATC 功能 輸入了航點 TORAM PLUTO WELDA APOLO,
然後按照 ATC 沿路的航向指示飛行, 但卻不會照著輸入的航點 TORAM PLUTO WELDA APOLO 飛行,
不知是何原因?
二.
如果輸入設定好ATC 的航點 TORAM PLUTO WELDA APOLO, 同時在FMS電腦裡輸入了相同的航點, 然後起飛後 開啟自動駕駛及FMS電腦自動導航, 此時的飛行航向會照著FMS 的航點飛 不會照著ATC所指示的航向飛
三.
如果關閉FMS, 按照ATC指示飛 此時也是不會照著先前ATC 輸入設定航點 TORAM PLUTO WELDA APOLO飛行. 而是按照 ATC自有的指示飛行路線到達目的地.
此情況也就是說
ATC的飛行指示 與 提交的飛行計劃路線導航點 及 FMS電腦自動導航點, 這三者或二者是無法同時啟用.
只能採其中一 種飛行.
不知我所描述的捆擾問題 不知您有否相同的困擾疑惑 還請指導
感謝
愚 Charles 黃 敬上
老眼昏花 回复给 Charles Washington
您好
在现实中,ATC也会根据当时的空中交通状况来调整飞行路线,
所以开始时输入的航路计划只不过是在出发阶段对飞行计划的申请和许可,
不代表一定会按照原样飞行的。
FMS中的航路是对飞机上飞行管理电脑的设定,
它不可能知道ATC的指示,只会按照输入的航路飞行。
所以飞行员在得到ATC最新的指示以后,
必须要重新输入最新的航路才行。
所以一开始输入的航路点在飞行中是不会被使用的,
ATC是空中交通管理机构,
FMS是飞机上搭载的计算机,
它们都是相对独立的存在。
Charles Washington
Dear sir 謝謝您的指導
文中所提 ATC 與 提交的飛航計畫 及 FMS 這三者的說明, 大致上可理清為 : 一切一定以ATC的空中交通管制命令為主, 事實理應也是如此 否則 各飛個各的 空中交通大亂 撞成一堆.
提交的飛航計畫 只是申請准予飛航的必備手續程序 及駕駛者的航行路線預定.
只是 FMS 的航路導航點 就必須隨著ATC的指示隨時更改沿路的導航點, 但是如此是否會忙於 FMS 的一再更改設定, 而且好似FMS的使用派不上場 半失去意義.
不過由甲地到乙地 通常早已有官方規劃好的若干航線 可供選擇, 且沿線有導航點, 就此而言 ATC如准許飛某航線 則ATC所下的導航指示命令 理該不會與提交的飛航計畫 及 FMS 這二者 差異太遠.
因為這二者也是依照選定及准許的航線上的導航點輸入.
以上為敝人的理解 不知對否 還請鑑示指導
感謝
愚 Charles 黃敬上
老眼昏花 回复给 Charles Washington
>只是 FMS 的航路導航點 就必須隨著ATC的指示隨時更改沿路的導航點, 但是如此是否會忙於 FMS 的一再更改設定, 而且好似FMS的使用派不上場 半失去意義.
如果变更太多太细的话,很多时候飞行员不是更改FMS,
而是直接使用MCP/FCU改变heading,height和speed,
紧急情况下还会改为手动操控。
>不過由甲地到乙地 通常早已有官方規劃好的若干航線 可供選擇, 且沿線有導航點, 就此而言 ATC如准許飛某航線 則ATC所下的導航指示命令 理該不會與提交的飛航計畫 及 FMS 這二者 差異太遠.
对,大多数情况下都是这样的。
Charles Washington
Dear Sir 您好 想再請教一個問題
在X-Plane 10 或 11裡 內附的地圖 它只能顯現選定的機場附近的導航點, 當我要設定如 桃園機場到東京機場的航線導航點 , 地圖無法顯示如此大距離範圍 就無法看到沿路導航點. 也就無法 輸入ATC FMS.
請教您 問題出在那裡 還是它只能顯示如此範圍而已
感謝
愚 Charles 敬上
老眼昏花 回复给 Charles Washington
您好,
是的,x-plane的地图就是这样,确实不适合于制作远距离飞行计划。
所以推荐您最好还是使用其他的专用工具:
非常优秀的免费飞行计划工具Little Navmap介绍
https://yinlei.org/x-plane10/2018/02/little-navmap.html
专业飞行计划网站1800wxbrief.com
https://yinlei.org/x-plane10/2016/09/1800wxbriefcom.html
关于在模拟飞行中制作飞行计划
https://yinlei.org/x-plane10/2016/09/flightplan.html
使用simbrief.com的地图查航路和航路点
https://yinlei.org/x-plane10/2016/01/simbriefcom.html
免费x-plane 航路制作工具Flight Plan Converter
https://yinlei.org/x-plane10/2015/10/x-plane-flight-plan-converter.html
SkyVector推出飞行计划功能
https://yinlei.org/x-plane10/2015/08/skyvector-flight-plan.html
等等
Charles Washington 回复给 Charles Washington
感謝您如此快的回覆指導解惑
愚 Charles 敬上
Charles Washington 回复给 老眼昏花
謝謝您 終於釐清疑惑困擾多時的問題
我在想 不知X-Plane profession版本 有解決 ATC, 提交的飛航計畫, FMS, 大範圍地圖, 等之問題
愚 Charles 敬上
老眼昏花 回复给 Charles Washington
您太客气了
我想世界上应该还没有这样的软件,
毕竟这是不同的专业范围,
而且实际飞行员培训时也没有这样一个面面俱到的东西,
他们只能从实践中慢慢学习
个人认为一个大而全的软件只会提供很多表面功能,没法深入。
使用单独的专业软件要更推荐一些。
https://me.yahoo.com/ansen882001#2cb2d
小弟目前正在使用連結方式,
因為xp11一旦連結編隊,或者要在地圖上看到其他飛機(非AI機),
是沒辦法辦的到的,需要至少3套軟體互相連結,
目前正在練習使用XSquawkbox+Vroute+vatsim,這三種軟體連結~
先到vatsim申請帳號密碼(航空管制站~~會有航管員指揮飛機~
這時不得不提simbrief的好用,因為它可以直接生成飛行計畫,直接送出就行了),
當航管站收到之後,便會指揮飛機允許放行,滑行跑道,起飛空速,
這實在xp11 plugins裡要先放一個xsquawkbox的插件(航空公司名稱,起降機場,管制飛行帳密,等等....都是在此插件輸入),
一旦按送出確認,vatsim(管制中心收到後),便開始指揮飛機,
這也要在Vroute輸入相關資料跟xsq的帳密,此時xp11+vatsim+vroute這3套軟體會全部連結起來,
可以從世界地圖上看的到所有飛機,高度,航點.....
說的簡單點,就是雖然是模擬,但是一切飛航程序是來真的,
更優的是,其他2套軟體可以跟任何不同的模擬飛行軟體共通~~就是突破了限制~~
可是最好事先都要先練習熟一點,雖然也有純文字回應,
但相關飛機起飛性能設定及ils.vor降落引導設定,都需要事先就準備好...
不然雖然是模擬....就代表....天空交通是真的有其他飛機在飛,
而管制員也真的會跟駕駛員通話發訊息....
所以沒至簡單....想要跟實際上還是有相當差距....
所以我到現在也還不太敢直接嘗試,基本上連結軟體都不難,都有了~~
跟大家分享....最近感覺模擬飛行越來越熱門了
老眼昏花 回复给 https://me.yahoo.com/ansen882001#2cb2d
hi,多谢您介绍使用虚拟航空的经验,相信Charles先生也会得到很多参考。
Vroute这款软件没有用过,因为它没有Mac版所以也就没仔细调查过。。
http://www.vroute.net/index.php
xsquawkbox以前用了几次,
https://www.xsquawkbox.net/
但是玩的人不太多,后来也就放弃了。
https://yinlei.org/x-plane10/2012/01/post.html#comment-278
不过vatsim经常会举办一些连飞活动,很多国家的玩家都会参加,
这个时候肯定会非常热闹的。
https://www.vatsim.net/events
再次感觉你的留言!!
sam
老眼昏花大師,您好
自從購入了a320 neo與e195後,究竟該如何開啟auto pilot(目前沒成功過....),另外,類似的問題~~b787...找不到開啟自動導航的按鈕....(所以目前都只飛738.748,777航點要一個一個敲進去,沒有自動載入文件系統fms)~謝謝
老眼昏花 回复给 sam
自动驾驶空客上应该是AP1和AP2;
787开启自动驾驶应该是A/P的ARM ON按钮吧,使用FMS的水平导航不是NAV吗?
sam
老眼昏花大師,您好
有個技術性問題想請問您,為何空巴FLIGHT PLAN都設定好了....可是當ap1按下去的時候,都會自動切掉,之後都無法再使用(應該說一直就按不下去了)甚麼圖案是可以控制自動駕駛(5指張開還是單獨一根手指)...一個是拉起一個是按下去
老眼昏花 回复给 sam
这是因为每个自动驾驶模式的接通条件很复杂,
比如以A320系列的NAV导航为例,抄写一下手册:
---
-起飞后在30 英尺无线电高度自动接通(若在地面已预位)
-当执行“DIR TO”时(在LOC 方式下低于700 英尺无线电高度除外)
-当飞机接近现行飞行计划航段(约1 海里之内)时按入HDG/TRK 选择旋钮
-飞行中,当NAV 方式已预位且飞机到达现行飞行计划航段的截获区时自动接通
---
所以如果不能满足条件,比如高度太低,偏离预定路线太远,飞行姿态不稳等时就无法接通。
再比如接通时的高度限制,
在“什么时候接通和解除自动驾驶”也有过解释,
https://yinlei.org/x-plane10/2015/03/autopilot.html
欢迎参考。