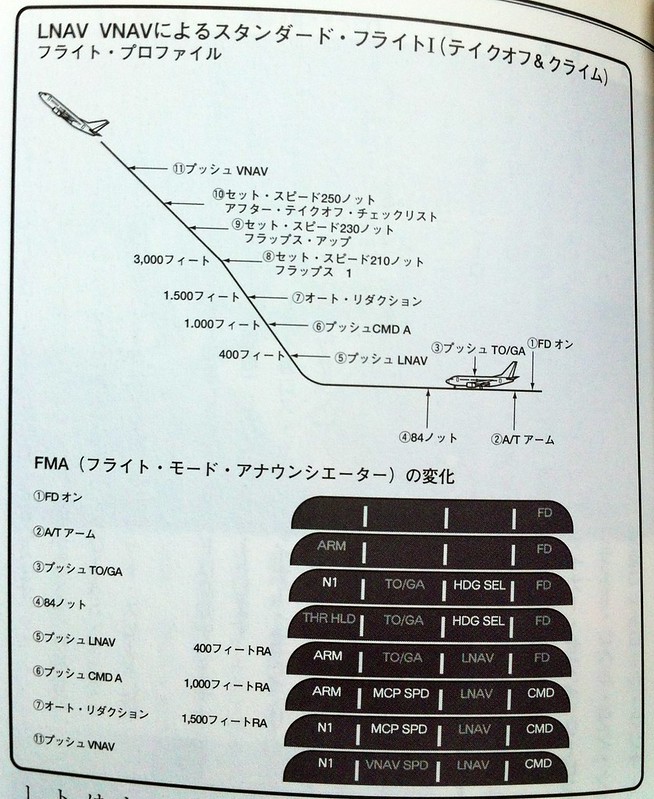
飛機繼續不斷上升,無線電高度計上的數字超過了400英尺(以客機駕駛手冊一書中737-500為例),
這時可以打開水平導航LNAV模式了,機長指示副駕駛按下MCP上的LNAV按鈕,

於是PFD上的左上方模式欄里方位設定由HDG SEL變為LNAV,飛行模式進入下圖中的第5階段。
LNAV 是Lateral navigation 的簡稱,即水平導航,可以控制飛機按照事先設定好的航路在水平面上自動飛行。
LNAV的原理首先是利用慣性導航裝置IRS,即使用飛機上的雷射陀螺,根據都卜勒效應得到飛機的加速度,
對時間積分後可以計算出飛機當前的速度和位置,再根據地面上的無線電導航設備(VOR,DME,ILS/DME,VORTAC,TACAN等)或者GPS得到的位置數據,
飛行管理計算機FMC把所有這些數據連續的合成起來,也就是FMC把IRS的誤差通過各種導航設備的數據不斷進行修正,正確控制飛機在應有的航線上飛行。
MCP上LNAV鍵被按下後,PFD上的飛行指令條FD就會根據FMC的指示,按照事先設好的航路對飛行員進行導航。
飛行員只要按照FD操縱飛機,即使有側風飛機也不會偏離航線。
這是因為FMC會根據天氣計算出風向修正角WCA(Wind Correction Angle),WCA也會被集成到飛行指令條FD上,所以飛行員駕駛時只要專注於FD就可以了。
支 持 本 站: 捐贈伺服器等運維費用,需要您的支持!
與此同時,油門控制模式也發生了變化,綠色的THR HLD變為了白色的ARM,
也就是說飛機升到400英尺,並且離地18秒以後,發動機自動推力鎖定模式就被解除,
發動機推力進入隨著爬升高度而自動減少的狀態。
飛機高度超過事先決定好的機場對地高度(比如1000英尺)以後,飛行員就可以打開自動駕駛模式A/P。
737上有兩台自動駕駛儀,左邊的為A,右邊的為B,一般來說機長會指示副駕駛使用左側,按下MCP中右側的A/P ENGAGE 部分的CMD A鍵,

於是飛行員的手就可以脫離操縱杆或操縱盤,飛機的各個舵面的控制就都交給計算機處理了。
這樣PFD上的左上方模式欄里自動駕駛設定由FD變為綠色的CMD,同時俯仰控制部分的模式也從TO/GA
變為MCP SPD,飛行模式進入下圖中的第6階段。
MCP SPD意味著現在飛機的速度將由MCP上中央處的IAS/MACH旋鈕來控制,
而飛行員將會根據飛行中不同階段不斷調整這個速度。
自動駕駛模式中,飛機忠實按照CDU中輸入的航路,不斷轉彎向下一個航點飛去。
超過氣壓高度1500英尺以後,推力模式自動從減推力起飛設定轉變為爬升減推力,
飛機發動機的聲音也比起剛才安靜了一些。
PFD上的左上方模式欄里自動推力模式從白色的ARM變為綠色的N1模式,飛行模式進入下圖中的第7階段。
TOC: 目錄
Next: ATC移交離場管制,進入VNAV模式
完
支 持 本 站: 捐贈伺服器等運維費用,需要您的支持!
Bo Yu Wei
請問PFD上的高度單位是英尺嗎?
老眼昏花 回復給 Bo Yu Wei
是的!
Bo Yu Wei
可是為什麼倒數第二張圖是一萬英尺,速度卻只有110節?
老眼昏花 回復給 Bo Yu Wei
這圖里應該表現的是目標高度10000feet,不是當前高度
Bo Yu Wei
哦!害我納悶一個下午
Bo Yu Wei
可是就算降落也不太可能設定到110節吧?
老眼昏花 回復給 Bo Yu Wei
這圖是個示意圖,我覺得數據應該是地面時的
老眼昏花 回復給 Bo Yu Wei
呵呵,圖確實不太好,不好意思啊
Bo Yu Wei
不會啦!寫得出來就已經很了不起了!
老眼昏花 回復給 Bo Yu Wei
謝謝
其實很早以前寫的東西,有很多不滿意的地方,如果有機會很想重新寫一遍呢……
CCHIMP
您好,
首先感謝您提供這麼詳細的資料,
我是新手, 想請問幾個自動駕駛遇到的問題:
1. 當我設定完新高度後, 按下ALT HLD, 但沒有即時改變,
改設定VERT SPEED(設很大), 並按下V/S後才快速改變,
是否是ALT HLD用法不對?
2. 當我設定速度加速 ex. 280->390時,
原本的高度設6000, 但它開始往上爬,
不再能維持在原本設定的高度, 並大幅超過6000,
且出現 "拐~拐~拐~" 的警報聲
降低速度後約低於350後才沒有警報聲.
也就是
速度設太高好像很容易衝高, 無法控制高度;
或者手動開太快也是, 且易有警報聲.
謝謝您~
老眼昏花 回復給 CCHIMP
您好,
1, ALT HLD(Altitude Hold)是用於高度維持的命令,並不是改變高度的
2, 390這個速度是有什麼根據呢?
看一下「Rod Machado的地面飛行學校」裡面對「飛機騰空的原理」介紹,
https://yinlei.org/x-plane10/big5.php?p=web/viewer.html?file=doc/groundschool.pdf
猜想高速飛行造成升力升高, 與平飛時的重力平衡得到破壞,
於是飛機就進入爬升了吧。
CCHIMP
原來如此, 謝謝您的解說.