這時飛機離開了東京北關東區域管理中心,開始進入東北區域,以波音777-200的Air System 115航班為例,
起飛離地後經過16分鐘,飛機此時到達了栃木県的那須地區,經過NZE VOR導航台,
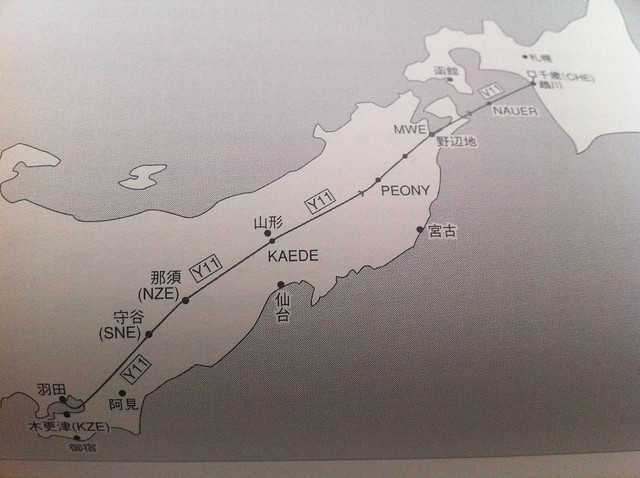
高度達到了39000英尺。
從上圖可以看到,飛機從守谷SNE導航台處開始進入到R-NAV(區域航行,Area navigation)的 Y11航路,
並將沿該航路一路向北,一直延續到北海道的千歲導航台。
這時ATC又從空管接到新的聯繫,開始進行區域間移交:
"Air System 115,Contact Tokyo 118.9"
意思是
"Air System 115航班,請聯繫東京東北區域,頻率為118.9",
飛行員復誦道
"Tokyo Control 118.9,Air System 115"
意思是
"收到,聯繫東京區域118.9,Air System 115航班"
支 持 本 站: 捐贈伺服器等運維費用,需要您的支持!
然後飛行員把電台通信頻率調至東北區調的118.900MHz,並聯繫道:
"Tokyo Control,Air System 115,Leaving 396 Climb 410"
意思是
"東京區域,這裡是Air System 115,正在通過39600英尺,上升到41000英尺"
東北區調的空管員確認收到航班的信號,並回答
"Air System 115,Tokyo Control,Roger"
意思是
"Air System 115,這裡是東京區域,收到"
飛機高度逐漸接近巡航高度,當達到距離預定高度還有900英尺時(以波音737為例),
駕駛艙內的高度警告資訊系統會發出"咚"的提醒音,並且琥珀色的高度警告Altitude Alert信號燈亮起,
提醒飛行員飛機已經接近巡航高度了。
當高度達到距離預定高度還有300英尺時(以波音737為例),警告燈又會自動關滅。
與此類似的高度警告還會在平飛階段飛機高度離開了預訂高度300英尺時發出警告。
飛機接近巡航高度後,駕駛管理系統開始自動向下調整俯仰角,
位於油門附近的水平尾翼配平(STAB TRIM)控制盤再次自動向前方轉動,飛機逐漸進入平飛姿態。

從PFD上可以看到右側垂直速度條上漸漸接近到中央的0點,而左側的速度條中的速度值越來越大。
當飛機高度達到距離預訂高度還有100英尺時(以波音737為例),
PFD上的左上方FMA飛行模式欄里的俯仰姿態設定由VNAV SPD會變為綠色的高度獲得ALT ACQ模式,
如下圖中的16階段所示。
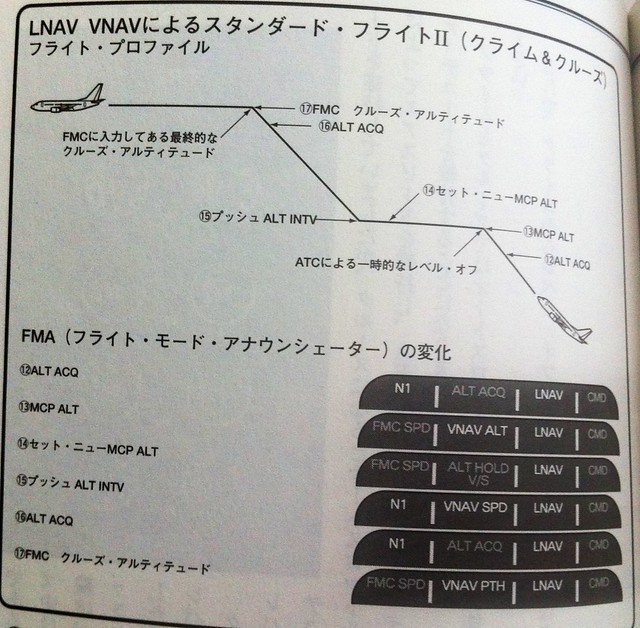
達到巡航高度後,飛機進入水平飛行,FMA飛行模式欄中的推力顯示也會發生變化,由N1模式變化為FMC SPD模式,
俯仰姿態也由ALT ACQ變化為VNAV PTH模式,如上圖中的17階段所示。
當飛行速度增加到經濟巡航速度後,發動機的油門也會自動被減小,飛機從爬升CLB模式正式進入到巡航CRZ模式。
飛行管理系統控制顯示組件(FMS/CDU)中的頁面的標題顯示也會由經濟爬升"ACT ECON CLB"變為巡航頁面"ACT ECON CRZ",由飛行管理系統計算出的目標速度TGT SPD被顯示出來。

上圖為波音737的顯示例,當前的目標速度為0.744馬赫。
飛行中計算機根據各種感測器的輸入,不斷計算出當前的經濟巡航速度,並不斷調節自動油門系統的控制。
你應該還記得在前面我們提到過,在爬升過程中計算機是通過ADFS改變飛機的俯仰角來改變速度,而爬升時油門值是固定不變的。
而進入巡航水平飛行階段後,高度的維持由ADFS來控制,而速度是由自動油門系統來控制了。
Prev: ATC移交區調,繼續爬升
TOC: 目錄
Next: 導航的基本知識
完
支 持 本 站: 捐贈伺服器等運維費用,需要您的支持!
留言簿