機長在地面做外部檢查時,副駕駛當然也沒有閒著,他要完成飛行前的預備程序和CDU飛行前程序。
下面就把這些工作簡單介紹一下。
副駕駛在駕駛艙首先要檢查各種文件。
象汽車需要年檢證一樣,飛機也需要作航空器適航年檢,沒有適航證的飛機是不能飛的。
飛行日至和維護文件里記錄了飛機的所有飛行記錄和維修記錄,這些文件如果也一定不能缺少。
然後需要檢查在飛行準備會時定好的燃料量是否加好。
另外各種應急設備也是檢查項目,比如滅火器,信號彈,手電筒,應急斧,逃生繩,救生衣,防火石棉手套,防火防煙面具等。
應急斧可以用來砸開窗戶,逃生繩是掛在機場天花板上的繩子,當發生迫降等意外不能從艙門逃生時,可以打開天花板上的緊急逃離口,把繩子扔到窗外後爬出窗口再順著繩子撤離。

上圖為波音737駕駛艙側窗應急出口的應急撤離步驟示意圖。
還有一些測試開關檢查是否正常,一些初始設置比如起落架放下,襟翼位置是否就緒,發動機潤滑油量,氧氣壓力等等,很長的一串,太枯燥了這裡就不一一列舉了。
支 持 本 站: 捐贈伺服器等運維費用,需要您的支持!
我們都知道現代化的客機都具體自動飛行管理功能,從起飛爬升到巡航下降到最後的降落都可以通過計算機控制自動完成。其中飛行姿態的控制由慣性導航系統負責,由於飛行員在起飛之前要校準飛機內部的IRS慣性參考系統,使導航更加精確。
關於慣性導航是如何依靠陀螺和加速度計完成,這些原理今後有機會的話可以單獨開一節再解釋。
校準設置需要通過FMS的CDU完成輸入,那麼FMS和CDU是什麼呢?

FMS飛行管理系統(Flight Management System ),以飛行管理計算機為核心的導航/制導和性能管理系統。
如果說發動機是飛機的心臟的話,那麼FMS就是飛機的大腦了。
上面提到的IRS是也FMS飛行管理系統一部分,為計算機提供了方位資訊,
而CDU控制顯示組件(Control Display Unit)使飛行員輸入飛機飛行所需要的各種資訊,如重量,航路等,計算機就可以自動計算出飛行的起飛速度,經濟速度,巡航高度,發動機的推力,並把各種控制指令發送到自動駕駛和自動油門系統,完成自動駕駛。
比如進入自動模式以後,波音飛機的油門和操縱杆就會自動地前後左右移動,就像有一隻看不見的手在操縱一樣。
通過FMS大大減輕飛行員的操作負擔,使他們可以騰出更多的時間用來監視各種機內設備,監聽空中管制,觀察空中的交通以及天氣狀況,極大了提高了飛行的安全性。
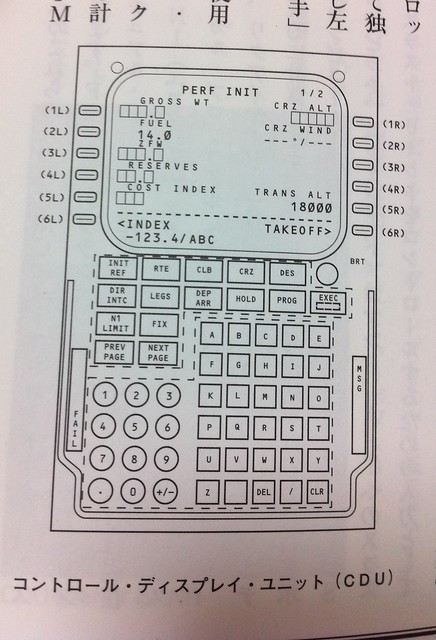
如上圖所示,CDU由一個螢幕,螢幕左右各6個按鍵,以及下面的功能鍵,字母數字鍵盤組成。
螢幕左邊的鍵從上到下叫做1L,2L,3L,4L,5L,6L,
同樣右邊的鍵叫做1R,2R,3R,4R,5R,6R,
每一個鍵對應一條輸入項目或者命令,按下這個鍵就相當於選中執行這個命令,或者相當於用字母數字鍵輸入以後的回車鍵。
CDU輸入初始數據包括機型,導航資料庫,系統時間確認,然後把當前停機口當前位置的經緯度輸入完成慣導系統的校正。
一般說來停機口處駕駛艙的正前方都會有一個顯示當前地點經緯度的標誌牌,飛行員只要抬頭看就可以看見這個數據,如下圖所示為成田機場某Gate的顯示。

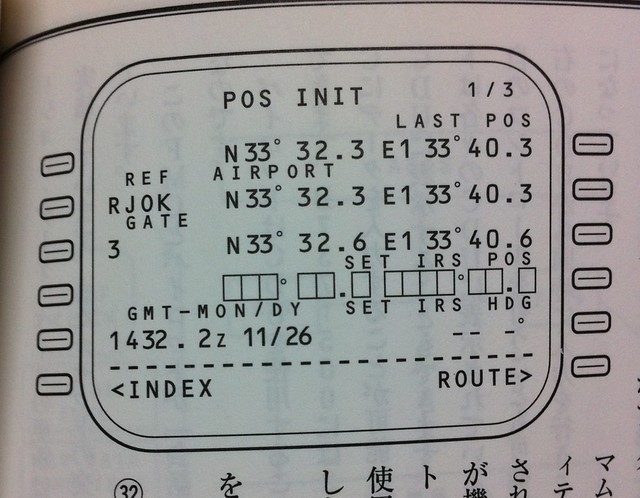
CDU輸入例如下圖,當前機場RJOK日本高知機場(2L),3號登機口(3L),當前時間(5L),機場經緯度(2R),3號登機口經緯度(3R)資訊已經輸入完畢:
之後是航班的導航數據,如航班號,機場,航路,跑道等。
在性能輸入里需要無燃油重量,燃油量,發動機轉速N1限制,重心等數據,計算機就會計算出起飛時所需要的幾個重要速度數據,V1,Vr和V2。
V1叫做起飛決斷速度,飛機起飛時滑跑增速到V1之前,如果機長感到發生任何異常,比如發動機停車或者轉速不夠,應終止起飛,因為在V1速度之前對飛機減速的話,還是可以把飛機上在現有跑道上停下來的。
但是如果錶速已超過V1,那麼在現有跑道長度的情況下,已經沒有足夠長的跑道使飛機停下,所以不管如何要繼續起飛,等升到空中以後再檢查和考慮對策了。
Vr為抬前輪速度。在這個速度之前,飛機還是保留在地面滑行狀態,到了Vr以後機長就會拉操縱杆,這是機頭才會抬起了,保持10-15度上仰姿態角升空。
V2為安全起飛速度,飛機離地以後、適當調整姿態角需要儘快加速至V2,並繼續加速至標準爬升速度。
對於MCP(Mode Control Panel),也要事先設置好標準離場程序的COURSE號,把自動推力設置和飛行指示FD設為OFF,空速設定IAS/MACH,航向HEADING設為跑道方向,飛行高度ALTITUDE設為飛航計劃中的高度等等。

到這裡駕駛艙的準備程序基本就緒,機長和副駕駛就可以開始飛行前程序(使飛機正式進入飛行狀態)了。
Prev: 1.5 航行前地面檢查
TOC: 目錄
Next: 1.7 CDU設置詳解
完
支 持 本 站: 捐贈伺服器等運維費用,需要您的支持!
Bruce Yang
MCP上CRS一般不需要設置,除非需要手動用VOR導航,HDG是跑道航向或者ATC給的離地後航向,ALT不能填巡航高度,而要填放行管制員給的起始上高