注意:本文以美国制造的单悬翼直升机为例进行说明,
即悬翼以逆时针方向旋转的飞机。
欧洲制造的飞机一般是顺时针旋转,
为了抵消旋转的反作用力矩,脚舵(尾浆)的操作方法与美国飞机正相反。
为了练习直升机驾驶,近日新入手个手柄
CH Products Fighterstick USB飞行摇杆,

又买了本直升机驾驶入门的书,恶补下理论知识,
经过十几小时的练习,终于略有小成。下面让我一一道来。
首先我们要知道,直升机的操纵和一般固定翼飞机很不同,看下图,
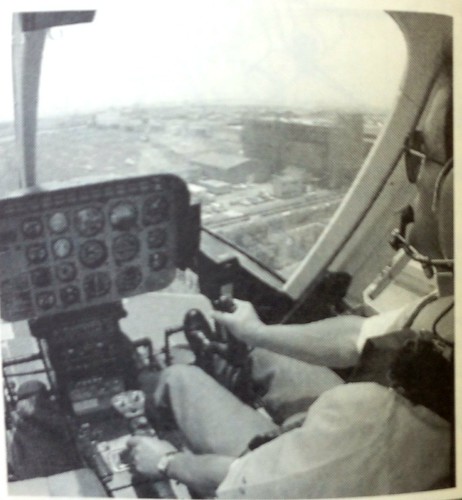
其要点是:
1 机长席是在右侧
2 直升机没有像塞斯纳172那样的操纵盘Yoke
3 飞行员右手操纵驾驶杆(Cyclic Control/周期变距操纵杆),操控飞机的俯仰pitch和横滚roll姿态。

要注意直升机前后移动需要改变飞机的俯仰姿态,
压杆压低机头,飞机向前飞行,如下图:

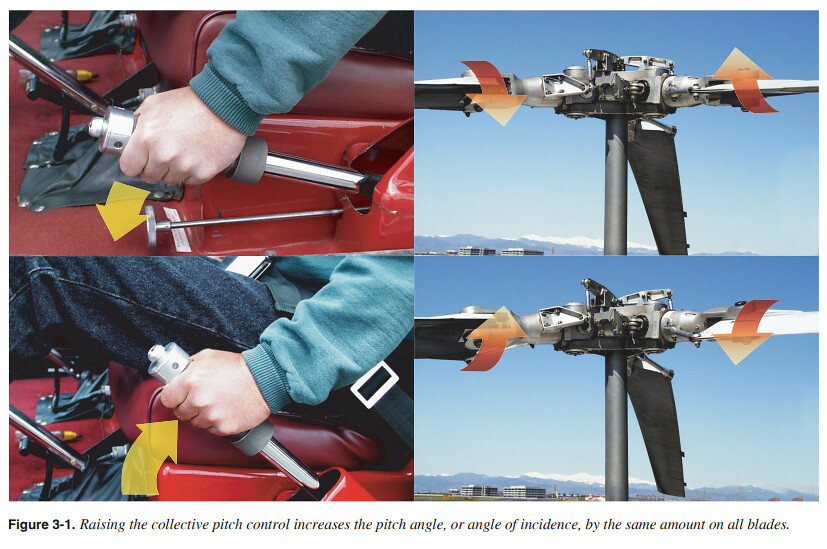
4 飞行员左手操纵总距操纵杆(Collective Pitch Control),
通过改变旋翼的攻角使机体上升和下降。

飞行员左手上提杆时,桨叶的桨距同时增大相同角度使旋翼升力增大,反之升力减小。
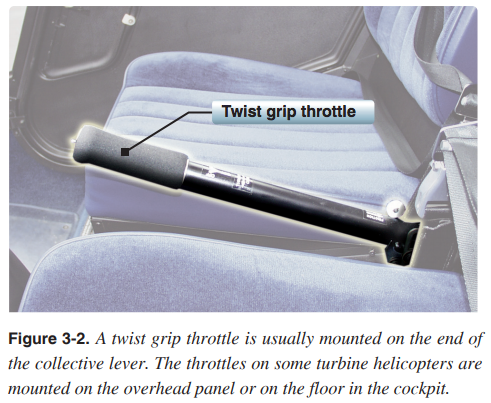
通常在总距操纵杆的手柄上还设置有旋转式油门操纵机构,类似摩托车的油门控制,
用来调节发动机油门的大小,因此该操纵杆又被称为总距油门杆。
5 脚舵(Anti-torque Pedals)也是必不可少的,
用来操纵飞机的偏航yaw姿态,这点和固定翼飞机相同。

对于单旋翼带尾桨直升机,脚舵经操纵线系与尾桨的桨距控制装置相连,
通过控制尾桨桨距的大小来调节尾桨产生的侧向力,达到控制航向的目的。
对于单旋翼无尾桨直升机,则是通过脚蹬控制机身尾部出气量的大小来调节侧向力。
对于双旋翼直升机,脚蹬控制的则是两旋翼总桨距的差动,
即一个增大一个减小,使得两旋翼反扭矩不能平衡,从而使机身发生航向偏转。
支 持 本 站: 捐赠服务器等运维费用,需要您的支持!
接下来看x-plane里的硬件设置方法,
菜单Settings/Jostick & Eqipment/Axis里的设定如下:
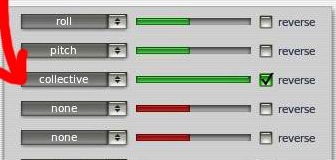
跟固定翼飞机一样,pitch,roll,yaw的三轴设定保持不变,
但是要加上collective的部分(上图中yaw没有显示出来)。
还有一点要注意的时,有些直升机机体的governor设定可以开关,

打开GOV以后即可开启自动油门,这样就不用手动控制油门,throttle就不用了。
我的CH飞行摇杆上本身就有3轴,于是把摇杆设成pitch和roll,
把左侧的throttle钮改成collective就可以了。
脚舵还是使用现在的赛钛客飞行脚舵Saitek Pro Filght Rudder Pedal,
设置项目还是挺简单的。
另外这个手柄还有pitch轴和roll轴的硬件配平trim钮,
此功能对于直升机驾驶非常有用。
好了,终于该开始介绍怎么飞行了,今天只介绍这个最普通的通常起飞takeoff模式,
别忘了起动发动机前把总距collective调至最低位置啊。
还有跟固定翼飞机一样,直升机也需要向着上风方向起飞的。
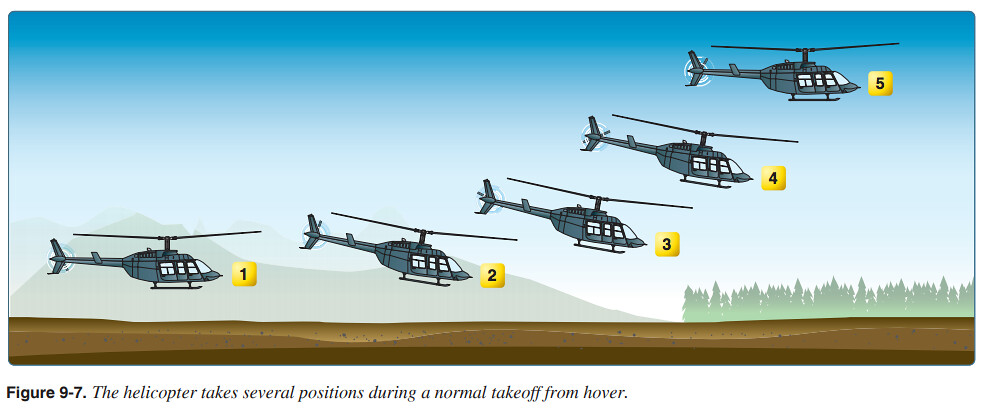
起飞操作:
1 非常小心地缓慢提高总距collective,同时配合总距collective的大小微踩左脚舵。
脚舵的控制量主要靠经验,标准是机头对准前方,令飞机不左右偏向。
有过几次飞行经验后,就会自然而然的记住总矩collective和脚舵的操作量了。
总距collective达到一定量后,飞机获得足够的升力,机身会稍微升起。
这时候一定要控制好脚舵,使机身正对前方;
同时注意观察姿态仪,相应地调整驾驶杆,使机身保持平衡,不要倾斜。
有过几次飞行经验后就会掌握具体达到多少总矩collective飞机就能上升了,可以考虑在摇杆该位置上记个记号。
驾驶杆的位置掌握后,pitch轴和roll轴的硬件配平trim钮就可以发挥大作用,
只要调整到稳定位置,以后每次驾驶杆就基本不用怎么动就行了。
保持飞机悬停在1.5米左右处。
2 轻压驾驶杆,直升机开始向前飞行,pitch角越大速度越大。
注意观察速度仪和姿态仪的显示。
如果机身高度略有下沉,可以适当调高总矩,并适当踩左脚舵,以保持高度和平衡。
3 到达一定速度后稍稍放松些驾驶杆拉起机头,逐渐加快速度向前飞行,同时控制飞机逐渐升高高度。
4 速度达到一直值以后,气流逐渐安定下来,就可以慢慢放松左脚舵。
5 压杆保持一定高度飞行
到这里起飞阶段就完成了。
对于刚开始飞行的初学者来说,保持机身的稳定性是个难关
,这里的说明看起来很简单,但实际操控并不容易,
需要细微地操控和一定的时间的耐心练习。
接下来再看看旋停中的转弯,

左转时当然蹬左脚舵,但是为了防止侧滑,同时也要把左驾驶杆向左稍倾斜;
右转时同理,右脚舵操控的同时,驾驶杆也要向右侧倾斜操作。
下面看看驾驶杆的操作总结,
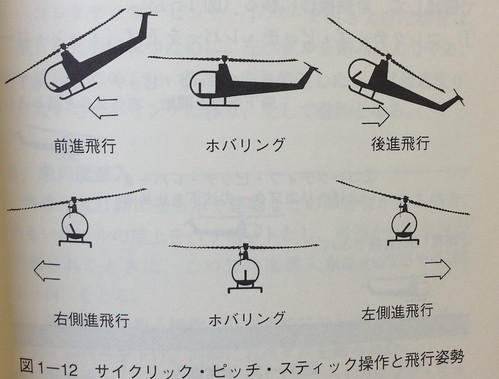
左上,驾驶杆前倾,向前飞行;
右上,后拉驾驶杆,向后飞行;
中间,驾驶杆位于中立位置,悬停;
左下,驾驶杆左倾,向左侧飞行;
右下,驾驶杆右倾,向右侧飞行。
最后介绍一下降落的方法。
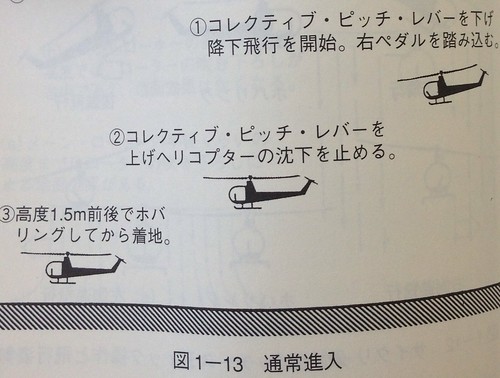
1 逐渐放下总距操纵杆,降低飞行高度。
与此同时由于旋翼的力矩减少,为了使机身不旋转,
也要同时减少尾奖的侧向力,因此需要轻踩右脚舵,
适当维持机首方向不变。
下降时直升机的下降坡度一般为10度,我们知道固定翼飞机的坡度一般为3度,
所以直升机比一般固定翼飞机下降坡度要陡很多。
下降时的速度操控靠驾驶杆,下降率控制靠总距操纵杆,机首的方向控制靠脚舵,
同时还要注意观察各个仪表,速度,姿态,航向都需要保持稳定和协调。
2 随着直升机接近停机坪,需要不断减低飞行速度。
但是随着速度降低,有效平移升力effective translational lift也会降低,
因此需要略微拉起总距操纵杆,以保持适当的机体下降率。
总距变化的时候,别忘了相应地蹬脚舵,
在这里踩左脚舵,保持前进方向的稳定。
3 到达着陆地点上方约1.5米处,使飞机的对地速度为0,进入悬停状态,并慢慢落地。
这步操作可能是最难的了,我现在也不能保证每次都能成功,还需要不断练习啊。
完
2016年10月9日更新
发现一个不错的教程,Tutorial: Flying Helicopters In X-Plane
里面有键盘操作的说明,下面摘录一下。
下面的是XP的缺省按键:
F2 = throttle up a bit
F1 = throttle down a bit
F3 = collective up a bit
F4 = collective down a bit
F5 = Mixture down (engine shutdown)
F6 = Mixture up
下面3个是作者的定制按键:
Z = left pedal
X = center the pedals
C = right pedal
2017年6月9日更新
美国联邦航空管理局网站上的手册
AA-S-8083-21A, Helicopter Flying Handbook
Aviation Handbooks & Manuals
Aircraft Handbooks & Manuals
x-plane.org上的手册
X-Plane Helicopter Flight School by Brett
留言簿