フライトシミュレーター愛好家のノート
-
旅客機の操縦探秘3.4 ギアアップ
引き続き、旅客機操縦マニュアルにあるボーイング737-500の操作マニュアルに基づき、離地後の操作について解説します。
前のセクションで、機長はラダーペダルから足を離し、操縦桿(ヨーク)のみを使って機体のピッチとロール姿勢を制御すると触れました。
もしかすると、「左右のロール時に発生するアドバースヨー(逆偏流)は、ラダーペダルで制御する必要があるのではないか?」と疑問に思われるかもしれません。 「ターンコーディネーターのボールをセンターに合わせること(コール・ザ・ボール)は、とても重要ではないのか?」
アドバースヨーについてですが、操縦桿を左に動かして機体を左にバンクさせると、右側のエルロンは下がり、右翼の揚力が増加します。その結果、右翼の誘導抗力も増加します。 その結果、機体は右に偏航(ヨー)し、エルロン操作によって目指していた機首の方向とは逆の方向に動いてしまう現象が起きます。これがアドバースヨーです。 つまり、左に操縦桿を切って左バンクさせると、機首が右に向いてしまうのです。 この時、パイロットは方向舵(ラダー)を操作して、アドバースヨーの影響を打ち消す必要があります。
この質問ができるということは、あなたは本当のプロですよね。 確かに小型機ではラダー操作は不可欠ですが、現代の多くのジェット旅客機では、一般にヨーダンパーと呼ばれる装置が搭載されています。 ヨーダンパーのスイッチを入れておけば、飛行中、ヨーダンパーシステムのコンピューターがラダーに逆方向の指令を出し、針路の変動を比例的に抑制し、機首が向いている方向に進めることを保証します。
したがって、自動化された現代の旅客機では、パイロットはラダー操作に気を取られることなく、操縦桿操作に集中でき、それによって飛行の安全性が向上します。
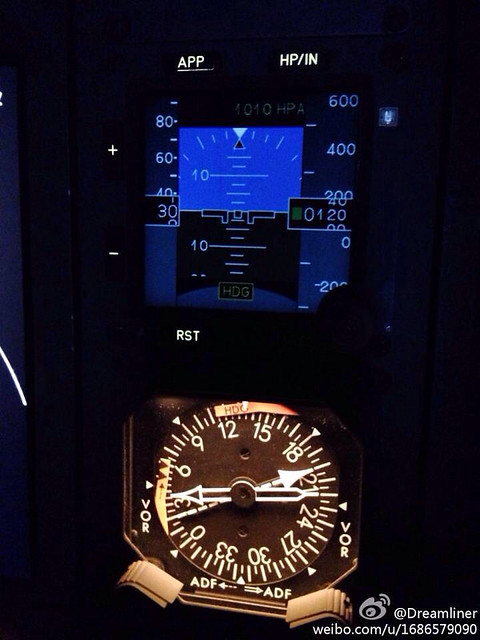
機体の主脚も離地すると、PFDの右下にある無線高度計の数字が増え続け、右側の昇降計(垂直速度指示計)の針は上を指します。 気圧高度計の高度も同時に徐々に上がり、これが「ポジティブクライム(正の上昇率)」の条件を満たしたことを示します。 そこで、脚を格納(ギヤ・アップ)することができます。
 上の図は、無線高度計の伝統的な航空機と現代のグラスコックpit航空機の比較です。従来型の高度計は指针式のアナログ計器ですが、現代の航空機では高度値がPFDの右下、決心高度(DH)の下方にデジタル表示されます。
上の図は、無線高度計の伝統的な航空機と現代のグラスコックpit航空機の比較です。従来型の高度計は指针式のアナログ計器ですが、現代の航空機では高度値がPFDの右下、決心高度(DH)の下方にデジタル表示されます。
この時、機内の掛け声は以下の通りです: 副操縦士:Positive climb(上昇成立) 機長命令:Gear Up!(脚上げ) 副操縦士の命令復唱:Gear Up(脚上げ)し、正面のEICASと副操縦士側PFDの間にある脚レバーを引き上げ、Upポジションに移動させます。
 上の図は、ネット上の737NGのコックpit写真です。脚レバーの形状がよくわかります。
上の図は、ネット上の737NGのコックpit写真です。脚レバーの形状がよくわかります。
この時、「ブーン–」という音が聞こえ、油圧システムが作動して脚を胴体内に格納します。 油圧ポンプの稼働音に伴い、しばらくすると軽く「ドン」という音がして、わずかな振動を感じます。これは脚扉が閉まる音です。 「ブーン—」という油圧システム音が止んだ後、パイロットは計器盤上で脚が完全に格納された表示を確認することもできます。
常に機体外に出ていた脚が格納され、扉が閉まると、機体の空気抗力は一気に減少し、客席に座る乗客は、外の騒音がずっと静かになったことを明確に感じるでしょう。
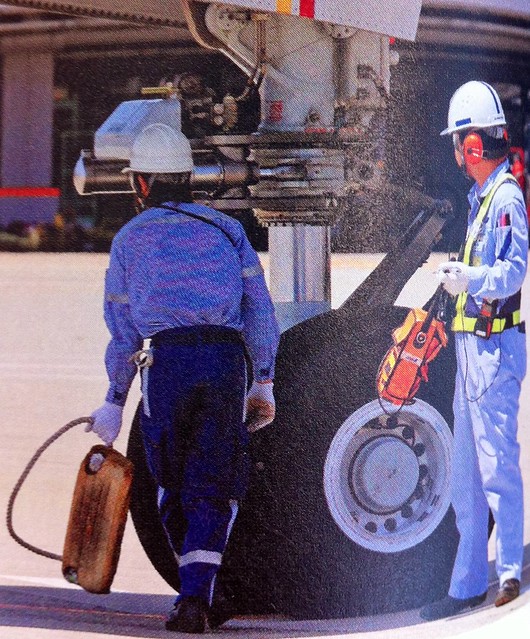
滑走路での加速滑走から離地上昇、そして脚の格納まで、まだ30秒を経過していません。 早期に脚を引き込むのは、機体の抗力をできるだけ早く減らし、より早く上昇できるようにするためであり、また空港周辺の騒音汚染を減らすためでもあります。
 上の写真は私が東京国際空港(羽田)で撮影したものです。このボーイング737-800は刚刚離陸し、滑走路の上空で脚の引き込みを開始しているのがわかります。
上の写真は私が東京国際空港(羽田)で撮影したものです。このボーイング737-800は刚刚離陸し、滑走路の上空で脚の引き込みを開始しているのがわかります。
機体の飛行状態についてですが、この時はフライトディレクター(FD)モードになっており、コンピューターがV2+20ノットの速度を維持するために必要なピッチ角度を計算し、PFD内のFD指令バーに反映させています。 したがって、パイロットは操縦桿(ヨーク)を微調整し、FDの指示に忠実に従って操作するだけです。 フラップ格納高度(FRA:Flap Retraction Altitude)に達するまで、機体はV2+20ノットの速度で飛行し続けます。 同時に、フライト管理システムの制御表示装置(FMS/CDU)のページタイトル表示も、自動的にエコノミークライム(経済上昇)モード「ACT ECON CLB」に切り替わります。 ここまで来て、離陸の操作はようやく完全に終了したことになります。
Prev: 起飛離地 TOC: 目次 Next: オートパイロットの作動
完
-
フライトシミュレーターで尖閣諸島を飛んでみよう
数週間の出張で、ブログの更新が長い間滞ってしまい、大変申し訳ありません。
この時期、再び日中間の外交危機が発生し、両国民の間で敵対感情が高まっています。 アメリカ人はその横で、自分たちの離間計画が大成功だと喜んでいるのでしょうね。 こうつまらない状況が早く終わることを願っています。
さて、主権を守ることは自分自身から始めるべきです。金銭的・時間的な制限で、私は実際に島へ渡ることはできませんが、 フライトシミュレータ「X-Plane10」の世界では、我々は自由に行き来できます。さあ、私も尖閣諸島へ遊びに行きましょう。
まず空港を選択します。「Location > Select Global Airport」メニューを開き、 RO
-
旅客機の操縦探秘3.3 離陸昇空
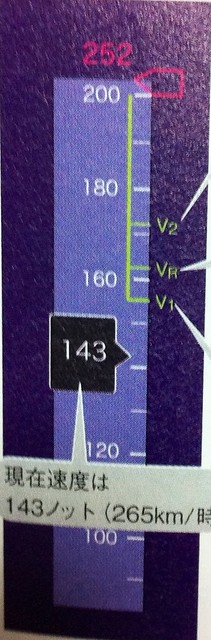
航空機の速度が増加し続けると、PFDの左側の速度帯に「speed trend vector」と呼ばれる緑色の矢印が現れます。
 これは現在の航空機の加速度を示しており、矢印が上向きは加速状態、下向きは減速状態を表しています。
矢印が指し示す速度は、10秒後の航空機の速度予測値です。
パイロットはこのspeed trend vectorを観察することで、将来の速度の趋向を知ることができ、これは特に離陸と着陸の段階において運航に非常に役立ちます。
これは現在の航空機の加速度を示しており、矢印が上向きは加速状態、下向きは減速状態を表しています。
矢印が指し示す速度は、10秒後の航空機の速度予測値です。
パイロットはこのspeed trend vectorを観察することで、将来の速度の趋向を知ることができ、これは特に離陸と着陸の段階において運航に非常に役立ちます。航空機の速度が45ノットを超えると、speed trendの矢印が急速に上昇し、機体の速度はますます速くなります。 加速度はV1速度に達した時点で最大値となります。
航空機がFD(フライトディレクター)モードにあるため、PFD中央の自機記号の上に紫色のFD指令バーが表示されます。 これは、設定された速度、高度、針路を達成するために、フライトコンピュータが計算した現在の機体がとるべき姿勢を指示するものです。 パイロットはFD指令バーの表示に従って、操縦桿またはスロットルを操作して機首を上げ下げしたり、左右に旋回させたりして、機体を指令バーに合わせます。そうすれば、機体はフライトプランに忠実に従って航行します。 下図はボーイング737のPFD表示の概略図です。紫色の逆さV字のようなマークがFD指令バー(flight director command bar)で、その下の白い逆V字のマークが自機を表します。下図では、パイロットは機首を上げて+8度の姿勢をとる操作を行う必要があります。
 一方、エアバス機の表示は以下の通りです。Flight Path Director (FPD)ラインはコンピュータが出した指令を表し、Flight Path Vector (FPV)は航空機の現在位置ベクトルを示します。パイロットはFPVがFPDの中心にくるように機体を操作します。
一方、エアバス機の表示は以下の通りです。Flight Path Director (FPD)ラインはコンピュータが出した指令を表し、Flight Path Vector (FPV)は航空機の現在位置ベクトルを示します。パイロットはFPVがFPDの中心にくるように機体を操作します。
 航空機の操縦は、まるでビデオゲームのようだと感じるかもしれませんか?もちろん、事はそれほど単純ではありません。様々なセンサーやシステムの故障により、コンピュータが誤った指示を出す可能性があるため、パイロットは常に各種計器を監視し、コンピュータの発する指示が正しいかどうかを確認し、分析なしにコンピュータの指示を盲目的に実行してはなりません。
航空機の操縦は、まるでビデオゲームのようだと感じるかもしれませんか?もちろん、事はそれほど単純ではありません。様々なセンサーやシステムの故障により、コンピュータが誤った指示を出す可能性があるため、パイロットは常に各種計器を監視し、コンピュータの発する指示が正しいかどうかを確認し、分析なしにコンピュータの指示を盲目的に実行してはなりません。地上滑走段階では、コンピュータのピッチ指示は常に水平-10度の位置に留まりますが、速度が60ノットに達すると、FD指令バーは+15度の位置に移動します。しかし、まだVrに達していないため、この時点ではまだ操縦桿を引いて機首を上げることはできません。
速度が80ノットに達すると、常に計器を観察している副操縦士は「80」と報告し、機長は左手で操縦桿を前に軽く押し付け、両足でラダーペダルを操作して航空機を滑走路の中央に維持し続けます。ラダーペダルは前輪を左右7度(ボーイング737の数値)転回させるように制御できるため、離陸と着陸の段階での方向の微調整にはラダーペダルで十分です。地上ではコンピュータも水平方向の指示を出すことができないため、機長は目視で滑走路のセンターラインを確認し、現在の航空機が逸脱していないかを観察し、絶えず方向を修正する必要があります。
対地速度が84ノットに達すると、PFD上のモード表示は「THR HLD、TO/GA、HDG SEL」に変化します(下図の4)。
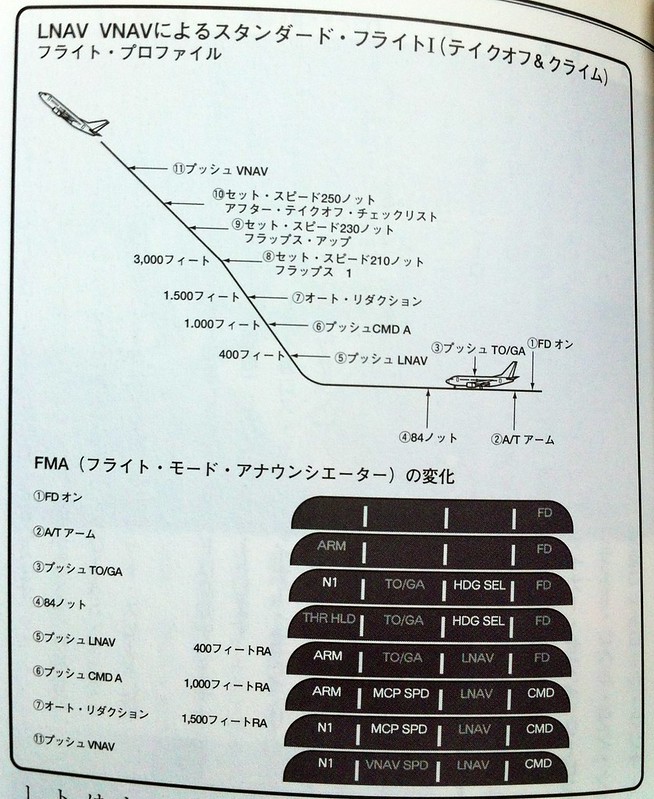 THR HLDはエンジンの自動推力値がロックされたことを示しており、エンジンはこのスラスト推力で航空機が離陸して18秒後、または地上高度400フィートに達するまで飛行し続け、その後でようやく推力の変更が許可されます。THR HLDは、離陸段階でエンジンが何らかの特別な原因により急にスロットルを減少させるのを防ぎ、航空機の安全性を保証します。
THR HLDはエンジンの自動推力値がロックされたことを示しており、エンジンはこのスラスト推力で航空機が離陸して18秒後、または地上高度400フィートに達するまで飛行し続け、その後でようやく推力の変更が許可されます。THR HLDは、離陸段階でエンジンが何らかの特別な原因により急にスロットルを減少させるのを防ぎ、航空機の安全性を保証します。航空機は加速を続け、離陸決断速度V1に達すると、副操縦士は引き続き「V1」と報告します。発音の規則では、速度表示がV1のあと5ノットになった時に発音を開始し、発音が終わるまでには速度表示がちょうどV1になるようにすると言われています。 V1に達した後、航空機に故障が発生しても停止してはならず、離陸動作を完了し続けなければなりません。したがって、副操縦士の報告を聞いた後、機長はずっとエンジンスラストレバーに置いていた右手を操縦桿に移し、両手で航空機の離陸操作を開始するか、アームレストに置きます。(それまでは、万一の事故が発生した際にいつでもエンジンを停止できるように、機長は右手をスラストレバーに置いておく必要があります。V1後は誤操作を防ぐため、右手を離すことで安全性を高めることができます。)
間もなく、機首引き起こし速度Vrが到来します。副操縦士は引き続き「Vr」と報告します。機長は実際にはこの時も計器を見ており、副操縦士の報告を待ってから操作を行うのではなく、航空機がVr速度に達した瞬間、すなわち副操縦士がVrを報告すると同時に、操縦桿を後ろに引いて機首を引き起こし、機体を每秒約3度の割合で上げて、PFD内のFD指示バーの+15度の位置に引き上げます。この動作のタイミングは離陸滑走距離に大きな影響を与えるため、少しでも遅れると地上滑走距離が増大するため、ここでのパイロットの操作は可能な限りVrと同時に行う必要があります。
 タイ国際航空のボーイング777が前脚が地を離れる瞬間。上の写真は私が日本の名古屋中部国際空港で撮影しました。
私は以前、Weiboで777-300ERを運航されている<a href=“http://weibo.com/kingoftheair"中国国際航空機長の砍砍而弹さんにVrについて尋ねたことがありますが、彼は満トー離陸の時、その速度は180ノットに近いと教えてくれました。
タイ国際航空のボーイング777が前脚が地を離れる瞬間。上の写真は私が日本の名古屋中部国際空港で撮影しました。
私は以前、Weiboで777-300ERを運航されている<a href=“http://weibo.com/kingoftheair"中国国際航空機長の砍砍而弹さんにVrについて尋ねたことがありますが、彼は満トー離陸の時、その速度は180ノットに近いと教えてくれました。機長は機体の機首上げ姿勢を維持し、FD指示バーと一致させるよう保ち、すぐにV2速度に達し、副操縦士は再び「V2」と報告します。この時、航空機の姿勢は機首上げ15度のピッチ角であり、先ほどまで滑走路を滑走していた胴体下の主脚も離陸して浮き上がります。
 機長の両足もラダーペダルを離れることができ、この後の操作は主に操縦桿またはサイドスティックに頼り、FD指示の方向に従って、上下左右に滑らかに航空機を操縦します。
機長の両足もラダーペダルを離れることができ、この後の操作は主に操縦桿またはサイドスティックに頼り、FD指示の方向に従って、上下左右に滑らかに航空機を操縦します。
 中国東方航空のエアバスA330-200が離陸して地を離れる瞬間。上の写真は私が日本の関西国際空港で撮影しました。
中国東方航空のエアバスA330-200が離陸して地を離れる瞬間。上の写真は私が日本の関西国際空港で撮影しました。航空機の離陸と着陸の過程において、飛行安全に最も大きな影響を与える外的要因の一つは横風です。 横風は航空機の航跡を滑走路の中心線から逸脱させ、風ウィンドシア(すなわち水平および垂直方向の風速の急激な変化、Wind shear)が発生した場合、深刻な時には航空機が滑走路をオーバーランし、機体が大破し、人命が失われる重大事故につながる可能性があります。 風ウィンドシアによる有名な事故には以下のようなものがあります: 1985年、アメリカン航空191便がダラス・フォートワース国際空港で墜落し、137人が死亡。 2001年、アメリカン航空587便が空中で突然失速し、ニューヨークの住宅地に突っ込み、265人が死亡。 2009年3月23日、フェデックス80便が日本の成田国際空港で着陸際、風ウィンドシアにより墜落し、2名のパイロットが死亡した。 したがって、パイロットは航空機の針路を横風に対してある角度向けに調整し、航空機が滑走路の中心線から逸脱しないようにする必要があります。 横風の風速が一定の速度を超えると、離着陸はできません。
-
旅客機の操縦探検3.2 離陸滑走
当日の天候や交通状況に基づいて離陸方式を決定した後、いよいよ正式な離陸滑走(テイクオフロール)の段階に入ります。 機長は左手を操縦輪(スティック)に移し、右手は引き続きエンジンスロットルレバーに置いておきます。 (ボーイング機では操縦輪(ヨーク)を使用しますが、エアバス機ではサイドスティックを使用し、その位置はパイロットの外側になります。下图の通りです。

 )
)この時、もし風がある場合は、操縦輪を風上側にわずかに傾けます。 離陸中、風の影響で機体が風下側に逸れる傾向があるため、 針路を維持するために、パイロットはあらかじめエルロンを逆方向に調整しておく必要があります。 操縦輪の操作は必ず丁寧に行うように注意してください。感覚的には、高速道路で自動車を直進させる際の左右の微調整操作に似ています。
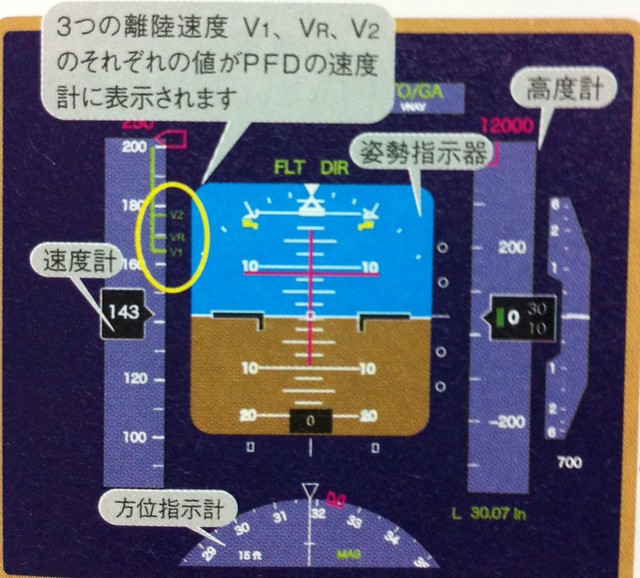
機体が滑走路のセンターラインに合った後、機長はPFD上のV1、Vr、V2速度の表示を再確認します。
 NDの地図モードでは航空路とウェイポイントの表示が正常で、CDUはECON CLIMBページに設定されています。
副操縦士側のCDUはROUTE LEGSページに設定されています。
NDの地図モードでは航空路とウェイポイントの表示が正常で、CDUはECON CLIMBページに設定されています。
副操縦士側のCDUはROUTE LEGSページに設定されています。

次に機長はMCP左側上部のA/T(自動推力)スイッチをARM側に切り替えます。これにより推力システムはコンピュータ制御モードに入ります。 離陸、上昇、巡航、降下、着陸までの全プロセスは基本的にフライトコンピュータFMCによる自動操作で、エンジン回転数N1の限界値もFMCによって制御されます。同時にPFDの左上のモード欄に"ARM"の文字が表示されます(下图の2)
モード欄の各項目の定義については下图を参照してください

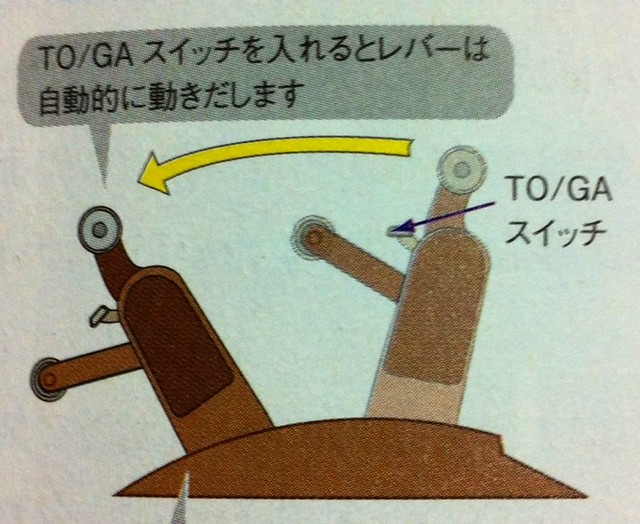
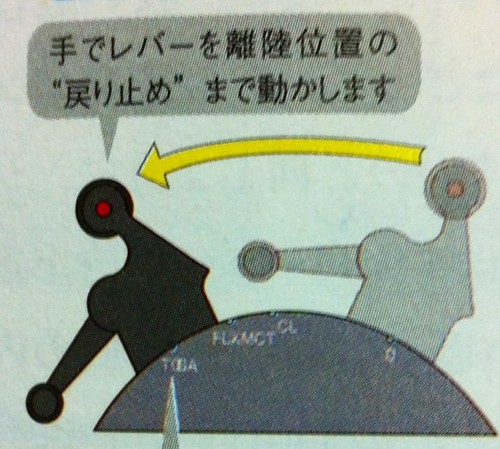
両パイロットがARMモードを確認・照合した後、NDの針路設定が滑走路の方向に正しく対しているか再確認します。 機長は右手で滑らかにスロットルレバーを押し込み、回転数N1が40%の位置まで前進させます(通常の離陸方法を例にすると、40%の位置は隣のフラップ5の位置とほぼ同じです)。 そしてエンジンの状態を観察し、左右のエンジン推力が安定していることを確認した後、機長は右手の人差し指でスロットルレバー上部にある黒いTO/GAボタン(ボーイング機)を押すか、スロットルをTO/GA位置(エアバス機)まで押し込みます。 TO/GAはTake Off/Go Around、つまり離陸/復飛(ゴーアラウンド)時の自動推力装置を意味します。ボーイング機でTO/GAボタンが押されると、スロットルレバーは自動的に前方に移動し、FMCが計算した最適なスロットル位置で停止します(下图)。そのため、パイロットは計器を見てエンジンスロットルの設定を知るだけでなく、スロットルレバーの位置を直接見て現在の設定を直感的に把握することもできます。
一方、エアバス機の推力装置はボーイングの設計とは大きく異なります。スロットルがFLXまたはTOGAのノッチに設定されると、スラストレバーはその位置に留まったまま変わりませんが、実際の推力(油門)はコンピュータの自動制御に従って増加し続け、離陸に必要な推力に達します。(下图)
 上图を見るとわかるように、エアバス機の推力は"0(アイドル)"、“CL(上昇)"、“FLX(フレキシble)/MCT(最大連続推力)"、および"TOGA(離陸復飛)“のいくつかの固定段階で構成されています。
上图を見るとわかるように、エアバス機の推力は"0(アイドル)"、“CL(上昇)"、“FLX(フレキシble)/MCT(最大連続推力)"、および"TOGA(離陸復飛)“のいくつかの固定段階で構成されています。ボーイング737を例に続けると、この時PFD上のモード表示は"N1、TO/GA、HDG SEL"に変化します(下图の3)
つまり「自動スロットル推力、離陸推力、自動針路」モードとなります。エンジンの轟音は高まり続け、機体は前方へ滑走し、まもなく現在の速度がPFD左側の速度バーの四角い枠内に表示されます。
副操縦士はエンジン油圧が黄色の正常範囲内にあるか注意深く監視し、機長は操縦輪を少し前に倒して、水平尾翼に作用する力によって速度不足時に機体が早期に頭を上げるのを防ぎます。この時、すぐにV1速度に接近しようとしています。
<a href=Prev: 3种起飞方式 TOC: 目录 <a href=Next: 起飞离地
完
-
旅客機の操縦席探訪3.1 3つの離陸方法
一般に、航空機には3種類の離陸方法があります。ここでは簡単に紹介します。
Normal Takeoff Method 通常離陸方式 航空機は滑走路に停止し、機首をセンターラインに正対させた状態でブレーキをかけ、スロットルレバーを前方へ押してN1 40%の位置にします。エンジンの安定運転を確認した後、ブレーキを解除すると航空機は滑走を開始し、対気速度が60ノットに達したら離陸推力に設定します。
この方式は、主にクロスウィンド(風斜め)/湿った滑走路/氷雪が積もり滑りやすい滑走路などの状況で使用されます。この場合、機首の方位を維持することが特に重要であるため、滑走路に正対してから推力を増加させるこの方法が、方向維持に有利です。 また、航空機の性能諸元における離陸滑走距離も、この離陸方式のデータを指しています。
Rolling Takeoff Method ローリング離陸方式 航空機が滑走路へ旋回して進入した後、停止せず、あるいは停止してもブレーキを解除することなく、スロットルレバーを前方へ押してN1 40%の位置にします。エンジンの安定運転を確認し、対気速度が60ノットに達したら離陸推力に設定します。
この方式の利点は、滑走時間を短縮できることです。同時に、航空機の移動速度の変化が比較的穏やかなため、乗客の不快感が比較的少なくなります。しかし、クロスウィンドや湿った/滑りやすい滑走路の条件下では、この離陸方式はあまり適していないことに注意が必要です。 また、この方式は滑走路距離を長く消費する傾向があり、特殊な条件下(例えば、各エンジンの加速性能が不一致で安定状態に達するまでに時間がかかる場合や、滑走路路面が滑りやすい場合など)では、機首方位を維持する操作により慎重を期す必要があり、パイロットに対する要求も高くなります。
Static Takeoff Method 静止離陸方式 航空機は滑走路に停止し、機首をセンターラインに正対させた状態でブレーキをかけ、直接離陸推力に設定します。エンジンの安定運転を確認した後、ブレーキを解除します。この方式の利点は、離陸滑走距離が最短になること、および方向維持が比較的容易なことですが、滑りやすい滑走路では操作を誤ると滑走路オーバーランの危険があります。同時に、相対的に騒音が大きく、加減速度も大きいため、乗客はより多くの不快感を覚えることになります。さらに、エンジン回転数が大きいため、異物を吸い込みやすく、エンジン損傷の原因となりやすくなります。
なぜ、すべての離陸方式において、エンジンが安定してから離陸推力を設定するのですか? それは、ジェットエンジンには「軽量で大出力」という利点がある一方で、「騒音が大きいこと」と「回転数を迅速に上げられないこと」という欠点も明白だからです。特に大型のターボファンエンジンでは、スロットルを急いで押しすぎると異常燃焼を引き起こす原因になります。また、後述する各エンジンの加速性の違いにより、すべてのエンジンの推力が安定するのを待たずに離陸推力を設定すると、航空機がバランスを失い、滑走路をオーバーランする危険があります。
次に、航空機が誘導路から滑走路へ旋回する際の注意点について紹介します。下の図(筆者が関西国際空港で撮影)のように、地上には黄色い曲線が引かれており、航空機の滑走経路を示し、滑走路のセンターラインまでつながっています。
 直線滑走と同じように、前輪がこの曲線に沿って進めば、滑走路センターに乗り込めると思うなら、それは大間違いです。
直線滑走と同じように、前輪がこの曲線に沿って進めば、滑走路センターに乗り込めると思うなら、それは大間違いです。なぜなら、この黄色い曲線は、機体の中心をこの線上に保って移動させれば、主翼や various 地上設備との安全距離が確保できることを示しているからです。もし本当にこの線に沿って離陸しようとすれば、航空機は数十メートルもの滑走距離を損失してしまう可能性があります。
 <a href=“https://yinlei.org/x-plane10/2012/07/22/%E3%83%94%E3%82%AF%E3%83%81%E3%83%A3%204.png"
<a href=“https://yinlei.org/x-plane10/2012/07/22/%E3%83%94%E3%82%AF%E3%83%81%E3%83%A3%204.png"
 上の写真にあるボーイング787が滑走路へ旋回する際、前輪がセンターラインを越えてから旋回し、方向修正を行っている瞬間が見て取れます。
この写真は筆者が大阪国際空港(伊丹)の滑走路32L頭の外で撮影したものです。
上の写真にあるボーイング787が滑走路へ旋回する際、前輪がセンターラインを越えてから旋回し、方向修正を行っている瞬間が見て取れます。
この写真は筆者が大阪国際空港(伊丹)の滑走路32L頭の外で撮影したものです。
離陸の過程で、航空機が速度V1に達する前に予期せぬ事態が発生した場合は、離陸を中止する必要があります。高速の航空機に対して急ブレーキを行い、滑走路内で停止させるため、この時の100メートルという距離は非常に貴重になります。パイロットは滑走路へ旋回して乗り入れる際、慎重にできるだけ滑走路の最後部に近づき、最長の距離を確保して離陸滑走を行おうとします。したがって、旋回時、パイロットは通常、速度が10ノット以下であることを条件に、地上の黄色い曲線を無視し、90度のターンを完了するように操作します。ボーイング737を例にすると、パイロットは操縦輪(ノーズホイール・ステアリング)を操作して旋回する際、通常、滑走路のセンター線を5メートル過ぎたあたりから転換を始め、しっかりとホールドして前輪が左右にふらつかないようにします。また、機長は機体の左側に座っているため、機長席の視線角度では、滑走路の中心より少し左の位置に合わせれば、飛行機は概ね滑走路の中心に正対していることになります。
<a href=Prev: 離陸許可 TOC: 目次 <a href=Next: 離陸操作
完
-
旅客機の操縦探秘 2.7 離陸許可
飛行機の誘導から出発前まで
飛行機が地上を移動(誘導)している間、副操縦士は通信周波数を塔(タワー)に合わせ、管制官とコンタクトを取ります。
“Tokyo Tower, Air System 115, with you”
これは、 “東京タワー、こちらは Air System 115 です” という意味です。
これに対し塔の管制官は、 “Air System 115, Tokyo Tower, Number 2” と応じます。 つまり、 “Air System 115、東京タワーです。離陸順位は2番です” ということです。
そこで副操縦士は復唱して、 “Number 2” と答えます。
客室内では、客室乗務員が乗客の離陸準備が整ったことを確認すると、内線電話で操縦席に連絡を入れます。操縦席には「ピン」という通知音が鳴り、パイロットの頭上のパネルにある CALL ライトが点灯します。
飛行機が徐々に滑走路の入り口に近づくと、管制官は次のような指示を出します。
“Air System 115,Taxi to Holding Position,Runway 16R”
これは、 “Air System 115、滑走路16Rの進入待機位置(ホールディングポジション)まで誘導せよ” (つまり、管制許可がない限り絶対に滑走路に入ってはいけないという意味です) ということです。
そこで副操縦士は、 “Taxi to Holding Position, Runway 16R,Air System 115” と復唱します。 つまり、 “滑走路16Rの待機位置へ向かいます、Air System 115” です。
機長は飛行機を滑走路の入り口付近で停止させます。もし先行機が離陸済みで、かつ同じ滑走路に他の着陸機がいなければ、塔から離陸許可が通知されます。
“Air System 115,Fly Runway Heading, Wind 190 at 19, Cleared for Takeoff, Runway 16R”
-
X-Plane 10.10がついにリリース、10.10B2バージョンは非常に安定
皆様お待ちかねの 10.10 がついにリリースされました。先週最初のテスト版 B1 が出た際、ネットの評判が悪く、多くの環境で起動できないとのことだったので、しばらく待とうと思っていました。今朝、<a href=“http://wiki.x-plane.com/Beta"開発者ブログを改めて確認したところ、B2 が公開され、多くのバグが修正されていました。待つ必要はありません、さっそくインストールして試してみましょう。
<a href=“http://www.x-plane.com/downloads/x-plane_10_installer-updater/"公式ウェブサイトからアップデーターをダウンロードし、インストール完了まで約 30 分かかりました。待ちきれずに起動すると、すぐに「クイックフライト」ダイアログが表示されました。おっと、これが 10.10 の最初の新機能ですね。
-thumb-640x482.png)
従来のバージョンでは、起動後に地形ファイルなどのインストールがゆっくりと進行し、長時間待たされる必要がありました。このクイックスタート機能があれば、プレイヤーはまず使用したい航空機・飛行場所・飛行時間・気象条件を選択できます。個人的には、この改善は非常にユーザー思いだと感じます。少しだけ称賛しておきましょう。
また、航空機を選択する際にファイルのディレクトリ構造が一目で表示されるようになりました。
-thumb-640x487.png) 以前のようにディレクトリ構造が見えず、初心者に優しくなかった状況とは違い、この改善もなかなか良いものです。
以前のようにディレクトリ構造が見えず、初心者に優しくなかった状況とは違い、この改善もなかなか良いものです。起動完了後、不便な点に気づきました。これまでの外付けコントローラーの設定がすべて消えてしまったのです。そのため、すべてのキー、ジョイスティック、スロットル、トリム、ラダーを一から設定し直す必要がありました。そのため、アップグレード前には必ず設定ファイル「X-Plane Keys.prf」をバックアップしておくことをおすすめします。新しい設定ファイルのフォーマットは変更されているため、古いファイルを新しいバージョンで直接使うことはできませんが、エディタで開いて参考にすることはできるでしょう。
ゲームコントローラーのプラグ・アンド・プレイ機能は試していません。最初ですべてのデバイスを接続してしまったので、この機能はまた今度試してみます。
また、どうやら 3D コックピットの視点位置を記憶できるようになったようです。最大 10 個のキーに保存でき、使用方法は CONTROL + (0~9) キーを押して、テンキーの数字 0~9 に保存します。
このバージョンには Columbia-400 が新たに追加されました。飛ばしてみたところ、デジタル計器があまりにも先進的で、まだあまり慣れていません。しかし、非常に丁寧に作り込まれており、ゆっくりと楽しむ価値があります。



今回のバージョンで最大のアップデートである HDR 機能も試してみましたが、自分のマシンスペックが不足しているように感じました。画質は非常に美しかったのですが(スクリーンショットを撮るのを忘れました。。)、明らかに動作が重くなったため、少し試しただけですぐにオフにしてしまいました。グラフィック面に関しては、高速道路が以前よりもリアルに作られていると感じました。
また、飛行中に突然クラッシュした場合、再起動後にエラー情報を開発者に送信でき、セーフモードで起動します。(私はまだこの状況に遭遇していません)
公式サイトの紹介によると、今回のアップグレードでは多くの改善がなされているようですが、まだ一つ一つ確認する時間がありません。とりあえず簡単なレビューを書きましたので、皆様の参考になれば幸いです。
完
-
旅客機の操縦を探る 2.6 フラップについて
前のセクションでは、離陸前にあらかじめフラップを離陸位置に設定しておくことを紹介しましたが、これはなぜでしょうか?
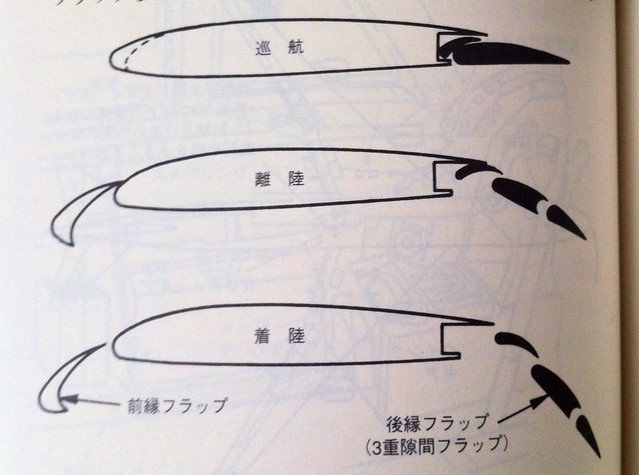
まず、フラップは翼の後縁または前縁に取り付けられ、下方へ偏向したり、(あるいは)後ろ(前)へスライドして、揚力を増加させるための翼状の装置です。取り付けられる位置と具体的な役割の違いに基づいて、フラップは後縁フラップと前縁フラップに分類されます。
一般的に後縁フラップには一つの欠点があります。それは、それが下に偏向するとき、翼上面の気流の流速を増大させて揚力係数を増加させることができますが、同時に翼の前縁における気流の局部迎え角も増加させてしまうことです。航空機が大きな迎え角で飛行する場合、翼の前縁上部での局部的な気流の剥離を引き起こしやすく、航空機の性能を悪化させる原因となります。もしこの時に前縁フラップを採用すれば、翼の前縁上部の局部的な気流の剥離を解消するだけでなく、後縁フラップの揚力増加効果を改善し、かつそれ自体にも揚力増加の作用があります。
以前はフラップの設定はタキシング中に行われていたそうですが、タキシング中はパイロットは管制と通信しなければならず、周囲の交通にも注意を払う必要があるため、非常に忙しく、フラップの設定を忘れがちでした。そのため、現在のフライトマニュアルでは、タキシングを開始する前にフラップを設定することが規定されています。
フラップの使用は主に離陸と着陸時です。飛行機に乗っていると、乗客はよく「ガーガー」という機械的な作動音に気づきます。一般的に、これが翼からフラップが伸びるときの音です。 上の図のように、通常の巡航時や地上に停泊しているとき、フラップは翼の中に格納されており、離陸と着陸で必要なときだけ伸びます。離陸や着陸時は相対的に飛行機の速度は遅く、この時必要な揚力はより大きくなるため、フラップが伸びる角度も深くなります。
フラップの設定位置は型式ごとに異なります。例えば、エアバスA330には5つの位置(0、1、2、3、FULL)があり、ボーイング777には6つの位置(1度、5度、15度、20度、25度、30度)があります。フラップという装置は非常に重く、体積も大きいため、素早く一気に完全に伸出させることは不可能です。そのため、実際の操作では、航空機の総重量と滑走路の長さに基づいて、必要な位置を設定し、迅速かつ経済的に離着陸動作を完了する必要があります。一般的に、エアバスA330の1、2、3位置は離陸に使用され、3とFULL位置は着陸に使用されます。ボーイング777の15と20位置は離陸に使用され、25と30位置は着陸に使用されます。
下の図はボーイング777のフラップ設定レバーで、位置はエンジンの推力レバーの右側にあり、6つの位置に角度値が記載されています。

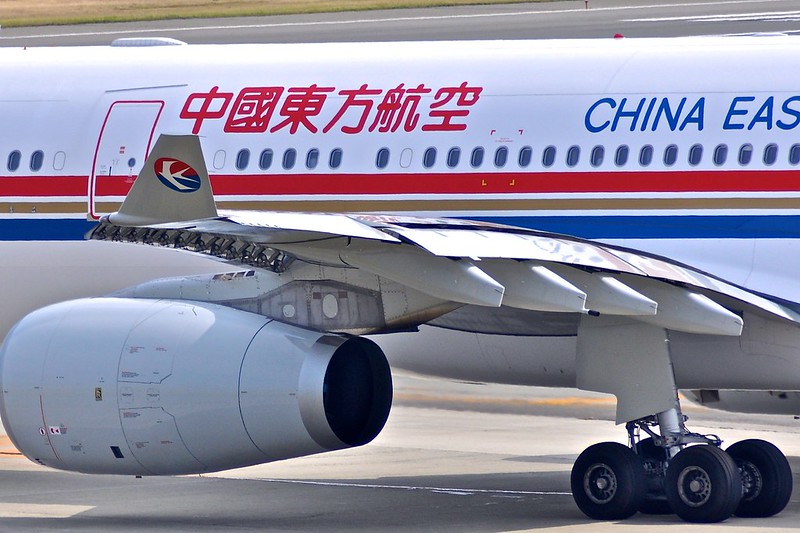
フラップの実際の外観を見てみましょう。 下の写真は関西国際空港で撮影したものですが、離陸準備のために地上を滑走している中国東方航空のエアバスA330-200が、前後のフラップを下げているのがわかります。また、下げている角度は比較的浅く、おそらく10度前後でしょう。
前縁フラップが下りた様子は、下の写真の角度から見ると比較的識別しやすいです。
 これはカソードパシフィックのボーイング777で、同じく関西国際空港で撮影しました。
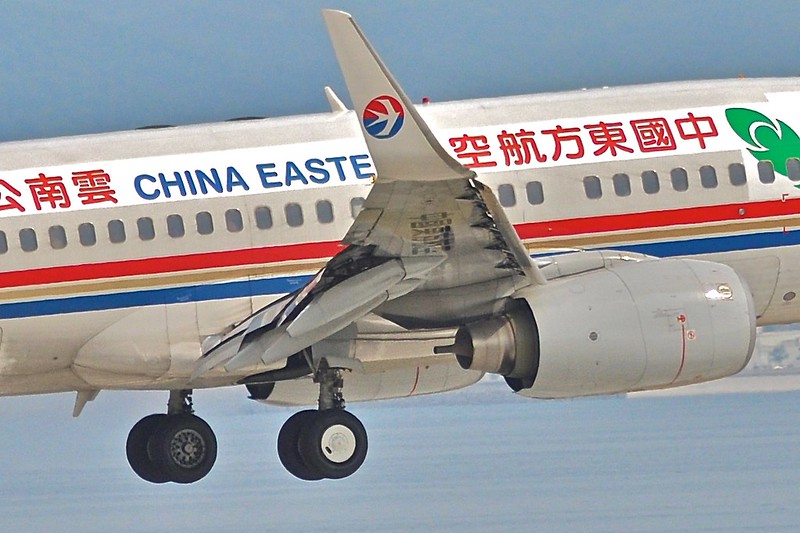
これはカソードパシフィックのボーイング777で、同じく関西国際空港で撮影しました。以下は広島空港で撮影したボーイング737-800で、離陸時に脚が地面を離れた瞬間のものです。フラップが浅く2段に伸びているのがわかります。

比較のために、関西空港で同日に撮影した別の着陸時の航空機を見てみましょう。機種は中国東方航空のボーイング737-700です。そのフラップの下げ角度は、上記の航空機の角度よりも明らかに深く、およそ30度程度あります。
上の2枚の写真は横から見たフラップです。角度を変えて見てみましょう。下は伊丹空港で撮影した、着陸しようとしている全日本空輸のボーイング777-200型機です。 真正面から見ると、後縁フラップが伸出した後の面積は非常に大きいため、航空機が低速状態でも飛行を継続するための十分な揚力が保証されています。
 下は真後ろから見たフラップです。その伸出角度の深さが明確にわかり、垂直に近い角度で下ろされている感覚があります。
下は真後ろから見たフラップです。その伸出角度の深さが明確にわかり、垂直に近い角度で下ろされている感覚があります。

ボーイング747のフラップは3段構造で、777よりもさらに長いです。これはドリームリフターが着陸して刚刚接地した時の写真で、その伸出面積の大きさがわかります。この写真は名古屋中部国際空港で撮影されました。

<a href=Prev: 地面滑行中的操作 TOC: 目录 <a href=Next: 起飞许可
完
-
旅客機操縦探秘 2.5 地上滑行時の操作 Taxi
地上での滑行操作、特に機体の旋回や飛行操縦面のチェックについて解説します。
地上で機体を旋回させる際は、ラダーペダル(足方向舵)とティラー(Tiller、操向ハンドル)を併用します。これらの操作装置は油圧システムを通じて前輪のステアリングを制御します。ボーイング747や777、エアバスA380などの大型機では、後輪にもステアリング機構が装備されていることがあります。
「フライト前手順」の節で、ラダーペダルは垂直尾翼にある方向舵を操作し、空中での旋回を行うために使うと紹介しましたが、実はこれと同時に前輪の転舵も制御できます。したがって、地上でラダーペダルを踏むことでも機体を曲げることができます。しかし、ラダーペダルによる制御では、機体は非常に小さい角度でのみ緩やかに曲がる、つまり非常に大きな半径での旋回しかできません。実際の空港では90度のターンが頻繁に求められるため、ラダーペダルだけではまったく不十分であり、ティラーを使用する必要があります。
ティラーはコックピットの外側にあり、回転できる黒いハンドルです。以下の写真をご覧ください。 (これはボーイング737-800の写真です。提供元のberqiang氏に感謝します。出典はこちら。 エアバスのティラーは形状が少し異なりますが、手元に良い写真がありません) パイロットはこれを回すことで60~80度の急旋回を行うことができます。そのため、狭い滑走路や誘導路でも、幅数十メートルの巨大な機体が数十メートルの旋回半径で、次々と直角のカドを曲がることができるのです。例えば、全長74メートルのボーイング777-300の旋回半径はわずか56メートルです。ティラーを使い始めるときは、必ずゆっくりと回すように注意してください。巨大な旅客機で急ハンドルを切ると、乗客はジェットコースターに乗っているかのように左右に揺さぶられ、シートベルトを締めていないと怪我をする恐れがあります。
エアバスのティラーは位置や形状が少し異なり、操縦桿(サイドスティック)と同じ平面上にあります。 拡大するとこのようになります:
また、ラダーペダルの上部(つま先部分)を踏むと、前輪のブレーキが作動します。左のブレーキだけを踏めば左の車輪だけ、右だけを踏めば右の車輪だけに効きます。したがって、旋回時に片側のブレーキを使うことで、機体はよりスムーズに曲がります。この時に外側のエンジンの推力を上げれば、さらに旋回半径を小さくすることができます。ただし、最近は燃料価格の高騰により、燃費を優先して、片側エンジンの推力を上げるという「奥の手」は使わないのが一般的だそうです。
誘導路の中央には黄色のセンターラインが引かれており、パイロットは前輪をこのセンターラインに乗せて慎重に進む必要があります。一部の大型機では、機体が高すぎて前輪の位置が見えないため、前脚にカメラが装備されています。パイロットはコックピット内のモニターで確認しながら、より安全に滑行操作を行います。夜間には、センターライン上に緑色の灯火、誘導路の両側には青色の灯火が点灯し、パイロットを誘導します。
ボーイング747-400のような大型機では、コックピットに座っているパイロットの視点は地上約10メートル、つまり4階建ての建物の窓から見下ろすような高さになります。そのため、自動車を運転するような速度感が持ちにくいのです。そのため、パイロットは主にND(ナビゲーションディスプレイ)の対気速度計の表示を見ながら、推力を調整します。
地上滑行中、パイロットは各飛行操縦面のチェックも行います。操縦桿(ボーイング機)またはサイドスティック(エアバス機)を左右に動かしてエルロンの動作を確認し、操縦桿を前後に押したり引いたりしてエレベーターなどをチェックします。コックピット内は視野が限られているため、後方の舵面の動きを直接見ることはできません。そのため、システムディスプレイ(SD)の表示を観察してチェックを行います。ラダーペダルで方向舵を操作するチェックをする際、前脚のステアリングと方向舵は連動しているため、機体が誘導路上で蛇行しないように、パイロットはティラーをしっかりと掴んでおく必要があります。これは、ティラーの方がラダーペダルよりも操作の優先度が高く、同時に操作された場合、ラダーペダルの操作はティラーによって上書きされるためです。
各操縦面について、民航資源網のこのページにある図が分かりやすいので、引用させていただきます。この分野に馴染みのない方の参考になれば幸いです。
飛行機は、ジェットエンジンが後方に排気することで前進する力を得ており、自動車のように動力が直接車輪に伝わるわけではありません。したがって、滑行速度はエンジンの推力とブレーキのみで調整することになります。空港の地面が必ずしも平坦ではないため、上り勾配の誘導路では速度を維持するために推力を増やし、下り勾配ではアイドリングを落とし、ブレーキを使って速度を落とす必要があります。
一般的に、晴れて乾燥した滑走路では、航空機の滑行速度は25ノット(約50km/h未満)です。雨や雪の天候で滑走路が滑りやすい場合は速度を落とす必要があり、特に旋回時には減速に注意が必要です。
また、ブレーキで速度を制御する際、ブレーキを踏みっぱなしにしないように注意してください。そうするとブレーキディスク内の温度が上昇し続け、ブレーキの効きが悪くなります。そのため、速度が落ちたらブレーキを緩める必要があります。
誘導路上に多くの航空機が並んでいる際、パイロットは前方の機体に接近しすぎないよう注意します。風が正面から吹いている場合、前方の機体の排気ガスが自機の客室に吸い込まれる可能性があり、異臭を伴う空気は乗客の不快感を招く原因になります。
滑行中、地上管制員から指示が送られてくることがあります。例えば、管制周波数を塔(Tower)に切り替えるよう指示するものです。 “Air System 115, contact tower 118.1” これは、 “Air System 115, 塔(118.1)へ連絡せよ” という意味です。そこで副操縦士は復唱します: “Air System 115, 118.1” そして、無線機の周波数を118.1MHzに切り替えます。
客舱内では、客室乗務員も安全デモンストレーションを終え、乗客にテーブルを格納し、シートベルトを締め、背もたれを起こすよう呼びかけ、離陸前の安全準備を完了させます。
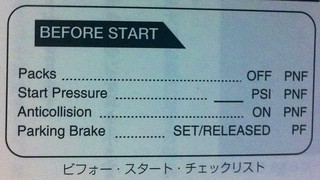
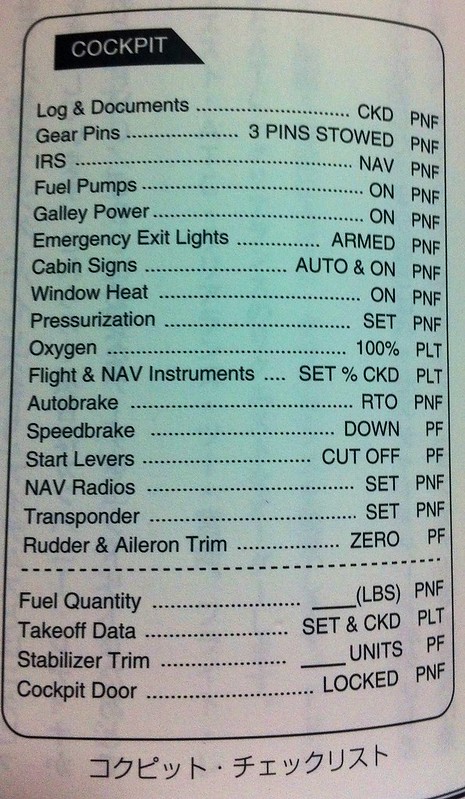
地上滑行中、機長は左手でティラーを操作し、右手でスロットルレバーを制御し、両足でラダーペダルを操作します。目は常に様々な計器をスキャンし、時折窓外の交通状況を確認し、耳は常に交通管制の指示に注意を払います。同時に、滑行および離陸チェックリスト(ボーイング737-500の場合、この時点で破線より上の部分を完了)を遂行し、 機体を安全に前進させ、徐々に離陸用滑走路の前方へと移動します。
[Prev: 地面滑行线路] [TOC: 目录] [Next: 关于襟翼]
完
-
旅客機操縦探秘 2.4 地上滑走経路 Taxi
飛行機はトーイングカーによってエプロンの端まで押され、整備員が再びコックピットと通信します: 整備員:「コックピット、パーキングブレーキをセットしてください」 機長:「ブレーキ設定完了」
そこで整備員はトーイングバーを前脚から外し、再び輪止め(chock)を設置し、 トーイングカーが機体から離れます。 (上の写真は名古屋中部国際空港で撮影)
副操縦士はEICASを監視し、左右のエンジンの稼働が安定していることを確認して機長に報告した後、(ボーイング737-500を例に)始動後チェックリストを実行します。
例えば、エンジンの除氷装置を自動に設定するなど、すべて正常であることを確認した後、機長は地上で待機している整備員と再び通信します。 機長:「地上、エンジン始動完了、通信ケーブルを外してもいいです」 整備員:「輪止めを移動し、着陸装置安全ピンを抜き、ケーブルを解除しました」 (着陸装置安全ピンは誤って脚を格納してしまうことを防ぐためのものです。飛行機が地上に留まっている間は必ず挿入されており、これにより誤操作で脚を格納しても飛行機が損傷するのを防ぎます)
輪止めが移動された後、ここでの地上整備員の仕事は終了です。彼らは飛行機を離れ、一列に並んで、まさに離陸しようとしている飛行機に手を振って見送ります。パイロットもまた、窓から彼らの労働に感謝の意を込めて手を振り返します。 (上の写真は広島空港で撮影)
飛行機はついに自力で移動できるようになりました。そこで副操縦士は空港の地上管制に申請します: “Ground, Air System 115, request taxi” これはつまり 「地上管制、こちらはAir System 115、誘導許可を請求」 という意味です。地上管制員は空港内の混雑状況や天候に基づき、移動してよいか、あるいは待機する必要があるかを指示します。問題がなければ、飛行機の誘導を許可し、誘導経路を知らせます: “Air System 115, Taxi to Runway 16R, Via P3 J2 W2 outer” これはつまり 「Air System 115、P3 J2 W2 外側経由で滑走路16Rへ誘導せよ」 という意味です。 パイロットはそれを復唱します: “Runway 16R, P3 J2 W2 outer, Air System 115” つまり 「滑走路16R, P3 J2 W2 外側, Air System 115」
飛行機は誘導路を利用してエプロンから滑走路へ移動します。誘導路は1本または数本の連続した黄色の中心線で識別でき、A、Cなどのアルファベットで命名されています。 上記のP3 J2 W2は空港内の滑走路出口の標識です。羽田のような大規模な空港では、飛行機がエプロンから滑走路の端まで移動するには一般に長い距離を移動する必要があります。パイロットは管制員が指示したルートを厳密に守って飛行機を誘導しなければなりません。誘導ルートはいくつかの地点で構成されており、パイロットは空港の図面(チャート)を参照し、ルートを確認してから誘導を開始します。
標識の様子は以下の図を見てください。滑走路24Lへの進入待ち地点A2の写真は、私が日本の関西国際空港で撮影したものです。 空港の標識にはいくつか種類があり、標識の色によってその意味を区別できます。 例えば、黒地に黄色の文字は位置標識で、上の写真の「A2」が地点標識です。 赤地に白い文字は強制指示標識で、滑走路または立入禁止区域に进入しようとしていることを示します。上の写真の「24L」は、まもなく24L滑走路に进入することを示しています。 黄地に黒い文字は方向標識および目的地標識です。下の写真の名古屋中部空港の「B6 B D6」は、現在のB誘導路から左折してB6地点へ、右折してD6地点へ行けることを示しています。「A B6 A6 A」の標識は、写真右下(写真の機体と正反対の位置)から来てこのB6地点に到達した場合、地上の誘導路に3本の黄色い線が現れることを示しています。左折線に沿って左折すれば左側のA誘導路に入ることができ、直進すればA6地点に到達し、右折すれば右側のA誘導路に入ることができます。 また、黒地に白い文字は滑走路残距離を示し、単位は1000フィートです。下の大阪空港の標識「3」は、滑走路を左から右に滑走している際、残り距離が3000フィートであることを示しています。
-
旅客機のコックピット探険 2.3 旅客機のゲートからのプッシュバックとエンジン始動
パイロットが離陸許可を取得し、出発前5分の準備作業(エンジン始動前の手順)を完了した後、地上管制にプッシュバックを申請することができます。例えば、
パイロット:“Tokyo Ground, Air System 115, request push back, spot 2, information F”
これは、『羽田空港地上管制、こちらはAir System 115便。プッシュバックを依頼、スポット2(搭乗橋2番)。ATIS情報F(Foxtrot)を受信済みです』という意味です。
空港の地上管制員はこの無線要求を受けると、エプロンの混雑状況を確認します。付近に他の航空機の移動がない場合、または当該便の移動が他の航空機に影響を与えない場合、次のように答えます。
“Air System 115, push back approved, runway 16R”
これは、『Air System 115便、プッシュバック許可。滑走路16R(Right)を使用してください』という意味です。
プッシュバックの許可を受けると、飛行機はいよいよ出発できます。
空港の大きなモニターに表示される各便の出発時刻について、一般の方は飛行機が地面を離れて離陸する瞬間だと思われるかもしれませんが、実際にはこの時間は飛行機が搭乗橋(またはスポット)を離れる時刻、つまり飛行機が停止状態から移動状態に入った時刻を指します。同様に、フライトの到着時刻も飛行機が地面に着陸した时刻ではなく、滑走して駐機場に完全に停止した時刻を指します。
まず、機長は内線電話システムを通じて地上で待機している整備員と連絡を取ります。地上員は電話機を機体のソケットに接続し、コックピットと通話できるようにします。
機長:「地上、プッシュバックとエンジン始動可」 整備員:「了解。パーキングブレーキを解除してください」 機長:「ブレーキ解除。ハイドロリックポンプ・オン」
(ここではボーイング777-200の会話を引用します。777の左右の主脚にはそれぞれ6つのタイヤがあり、後ろの2つのタイヤは油圧で自動車のように左右に切ることができ、これにより777の巨大な機体が地上で旋回する際、小さな回転半径を得ることができます。)
整備員:「了解。プッシュバック可」
この時、通信を担当する整備員の横にもう一人の地上員が前脚の車輪止め(チョック)を外します。下図のように、
 すでに飛行機の前輪に接続された強力なトゥートラクター(プッシュバック車)が、下図の牽引バー(トウバー)を通じて、
すでに飛行機の前輪に接続された強力なトゥートラクター(プッシュバック車)が、下図の牽引バー(トウバー)を通じて、
 数百トンもある飛行機を後押しし、機首が空港ターミナルビルに向くようにゆっくりと後退させます。
地上の整備員も飛行機と一緒に後ろに移動します。
数百トンもある飛行機を後押しし、機首が空港ターミナルビルに向くようにゆっくりと後退させます。
地上の整備員も飛行機と一緒に後ろに移動します。 (上の写真は名古屋中部国際空港で撮影)
(上の写真は名古屋中部国際空港で撮影)
注意すべき点は、プッシュバック中、パイロットは絶対に前輪の操縦舵(ノーズステアリング)操作やブレーキ操作をしてはならないということです。これを行うと前輪または牽引バーが破損する恐れがあるからです。プッシュバック中の機体の移動方向は完全にトゥートラクターによって制御されます。
 トゥートラクターが飛行機を後ろに押しながら旋回している様子。広島空港で撮影。
トゥートラクターが飛行機を後ろに押しながら旋回している様子。広島空港で撮影。
その一方、客室では機内放送が始まり、客室乗務員がフライト情報をアナウンスし、乗客にシートベルトを着用するよう案内します。
コックピット内のパイロットも暇ではなく、始動前チェックリストを実行します(下図はボーイング737-500のもの)。
 問題なければ再び地上と通信します。
問題なければ再び地上と通信します。機長:「地上、エンジン始動準備完了」 整備員:「了解。始動可」 機長:「右側2号エンジン始動」 機長:「左側1号エンジン始動」
 (これはボーイング737-800型の写真です。<a href=“http://tieba.baidu.com/home/main?un=berqiang&fr=pb"百度貼吧のberqiang氏に提供いただきました。出典は<a href=“http://tieba.baidu.com/p/2859718575?pn=1"こちら。)
(これはボーイング737-800型の写真です。<a href=“http://tieba.baidu.com/home/main?un=berqiang&fr=pb"百度貼吧のberqiang氏に提供いただきました。出典は<a href=“http://tieba.baidu.com/p/2859718575?pn=1"こちら。) -
エアライン操縦探秘 2.2 標準出発経路(SID)
前のセクション <a href="/blog/ja/2012/07/ja-airline_pilot_21-5"出発前5分 で、交通管制官がパイロットに対してMoriya7号出発手順(Departure Procedure)を使用するよう通告したことに触れましたが、出発手順とは具体的にどのようなものでしょうか?
航空機が空中を飛行する際、交通ルールが存在しないわけではありません。航空会社は数多く存在し、特に大規模な空港では数分おきに航空機が離着陸しています。 地上の交通と同様に、一連の交通ルールによって管理されていなければ、航空機の運航は極めて危険なものとなります。 そのため、空中には多くのルートが設定されています。地上の道路のように肉眼でこれらのルートを直接見ることはできませんが、パイロットは規定を厳格に遵守して飛行任務を遂行しなければなりません。 その中で、空港を離れる航空機のために設定されたルートと手順は、「計器出発方式(Standard Instrument Departure)」と呼ばれ、略してSIDと呼ばれます。
SIDは、離陸後から出発地点まで航空機を誘導する一連のあらかじめ設定された航路です。この出発地点とは、フライトプランにおける航路の最初のウェイポイント(航路点)のことです。言い換えれば、計器出発方式とは、航空機をターミナル管制区域(TMA/Terminal Control Area)から誘導し出すための手順です。前のセクションで触れたMORIYA出発手順のMORIYAは、羽田空港を離れる際の一つの出発地点であり、茨城県の守谷にあるウェイポイントです。
一つの空港には、多くの異なる計器出発方式(SID)が存在する場合があります。各滑走路には、航空機を異なる出発地点へ誘導するための異なる出発手順が存在します。航空機がどの出発地点へ向かうかは、使用する滑走路の方向、およびフライトプラン上の目的地と航路によって決まります。
この手順には、空港を離陸する際の針路、高度、旋回する地点、時間などが含まれています。管制官は航空機の飛行間隔を制御するだけでよく、パイロットはこの手順に従うことで空港を離れ、航路へと入ることができます。
出発手順は、多くのウェイポイントとナビゲーションポイントで構成されています。これらのウェイポイントは、経緯度で示されるか、または航法援助施設に対する相対位置で示されます。例えば、VORの放射方位(ラジアル)と距離を指定すれば、VOR近傍の特定の地点を確定できます。同時に、出発航路には上昇情報も記載されており、パイロットがある地点で特定の高度まで上昇すること、またはそれ以上の高度を維持することを示します。
航空機が出発地点に到着すれば、出発手順は完了です。
計器出発方式(SID)が規定されているのは、離陸後の航空機の安全を確保し、離陸機の処理を効率化するためです。また、住宅地の上空を飛行する際の騒音を可能な限り低減するという目的もあります。
以下では、実際の羽田空港におけるMoriya7号出発手順の具体的な規定を見てみましょう。
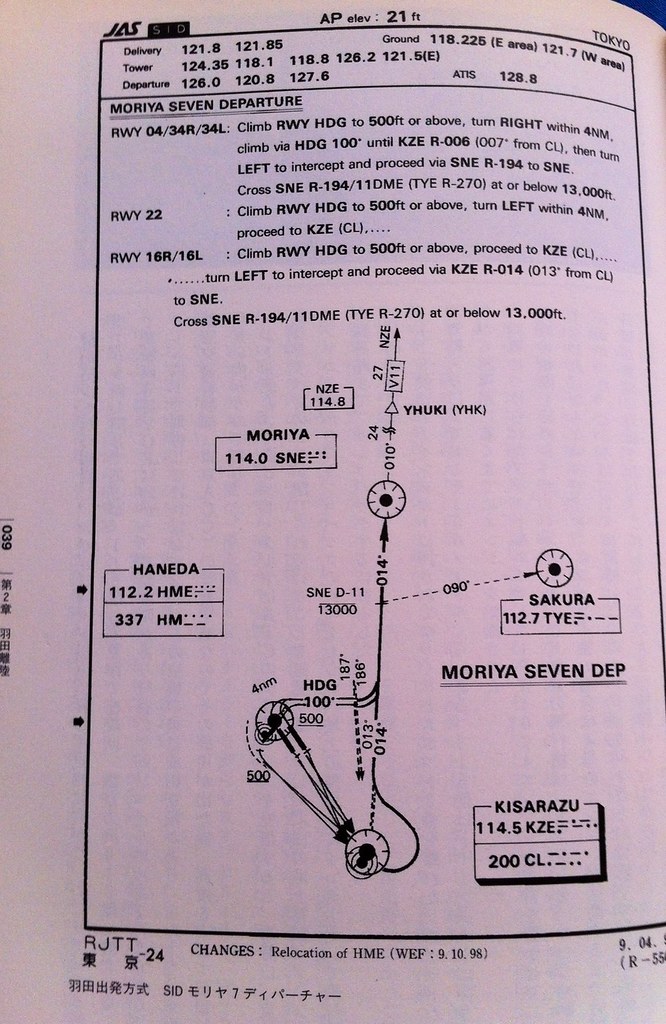
図の最上部には、交通管制で使用される各種の周波数がリストされています。例えば、リリース許可(Delivery)は121.8および121.85MHz、地上管制は118.25および121.7MHz、塔は124.35、118.1、118.8MHzなどです。
図の下側の文字部分と航図は、出発手順を具体的に示しています。例えば、滑走路16Rまたは16Lから離陸する場合、 まず滑走路方向に沿って500フィート以上に上昇し、図の右下にあるKZE(KISARAZU 木更津)ウェイポイントまで飛行した後、 左に旋回して14度の方向(ほぼ真北方向)へSNE(MORIYA 守谷)ウェイポイントへ向かって飛行します。 MORIYAはVOR航法局です。 ここでは、MORIYAの前方11マイルの地点に高度制限があり、13000フィート(約3300メートル)以下で飛行しなければならないことが示されています。
VORは中国語で「超短波全方向無線標識」を意味し、国際民間航空機関(ICAO)が定める国際標準の無線航法援助施設です。 航空機に搭載されたVOR受信機は、VOR地上局から発射される基準位相信号と可変位相信号を受信し、これら2つの信号の位相差を比較することで、地上のVOR局に対する航空機の放射方位、すなわち航空機の磁方位(QDR)を算出します。そして、指示器に方位情報を表示し、パイロットが航空機の位置を確定し、航行を導くのに役立てます。
下の写真は、私が大阪の八尾空港で撮影した八尾VOR地上局のものですが、その構造は非常にシンプルであることがわかります。

小型機に搭載されるVOR指示器は以下の図のようになります(画像出典:Wikipedia):
 使用する際、パイロットはまずナビゲーション受信機の周波数をそのVOR局の周波数(例えばMORIYAなら114.0MHz)に合わせ、
次にOBS(Omni-Bearing Selector)ノブを調整して飛行したい針路に合わせます。もし航空機が現在ちょうどVOR局の方角を向いているのであれば、
VOR指示器の針は上の図のように中央の位置に表示されます。
使用する際、パイロットはまずナビゲーション受信機の周波数をそのVOR局の周波数(例えばMORIYAなら114.0MHz)に合わせ、
次にOBS(Omni-Bearing Selector)ノブを調整して飛行したい針路に合わせます。もし航空機が現在ちょうどVOR局の方角を向いているのであれば、
VOR指示器の針は上の図のように中央の位置に表示されます。Prev: 出発前5分 TOC: 目次 Next: 旅客機のプッシュバックとエンジン始動
完
-
旅客機操縦の秘探 2.1 出発5分前
パイロットがコックピットで飛行前の準備を進めている間、地上スタッフも飛行の準備を行っています。 例えば、航空機に電力を供給するケーブルを外したり、給油車、貨物車、ケータリング車などが機体から離脱したり、牽引車を前脚に接続したりします。
 ケータリング車。筆者撮影、東京国際空港にて。
ケータリング車。筆者撮影、東京国際空港にて。

 給油車。筆者撮影、東京国際空港にて。
給油車。筆者撮影、東京国際空港にて。
 貨物車。筆者撮影、東京国際空港にて。
貨物車。筆者撮影、東京国際空港にて。
 牽引車。筆者撮影、東京国際空港にて。
牽引車。筆者撮影、東京国際空港にて。
 地上スタッフがボーイング777の機体から地上電源ケーブルを外しているところ。広島空港で撮影。
地上スタッフがボーイング777の機体から地上電源ケーブルを外しているところ。広島空港で撮影。
航空機の移動を妨げるすべての車両や設備が離脱した後、地上での準備もすべて完了します。 地上整備員は、コックピットと接続された有線電話を通じて、正式に出発の5分前になったことをパイロットに知らせます。
 (上の写真は名古屋中部国際空港で撮影)
(上の写真は名古屋中部国際空港で撮影)機長はそこで、副操縦士に指示を出し、無線で空港管制に連絡して、リリース(出発許可)を要求します。 一般に大きな空港にはリリース専用の周波数がありますが、少し小さな空港では交通量が多くないため、リリースの要求を塔が兼任することがあります。
>ブリーフィングの節で、ディスパッチャーがフライトプランをすべてのフライトを管理する政府部門-航空局に提出し、飛行許可を申請することに触れました。このフライトプランはすでに空港の管制官に伝えられていますが、出発の5分前にパイロットが飛行のすべての準備を完了して初めて、正式に管制に対してリリースの申請を伝えることができます。交通管制の許可がない場合、航空機はエンジンを始動し、搭乗口を離れて滑走路へ移動することはできません。
ここで副操縦士は、無線通信のVHF周波数をリリース(Delivery Clearance)に合わせ、マイクを使って要求を出します。以下では、羽田から北海道へ向かうエア・システム115便を例に挙げます。 パイロット:“Tokyo Delivery, Air System 115, Gate2” 意味は、「東京羽田空港デリバリー管制、こちらはエア・システム115便、ゲート2」です。
空港のデリバリー管制官はこの無線要求を受けると、次のように答えます。 “Air System 115, Tokyo Delivery, Cleared To NewChitose Airport, Moriya7 Departure flight plan route, maintain flight level 210, Squawk 2460, Readback only Squawk” 意味は 「エア・システム115、ここは東京羽田空港デリバリー管制、新千歳空港へ離脱許可。Moriya7出場手順を使用せよ。飛行高度210を維持せよ。トランスポンダーコードは2460。トランスポンダーのみ読み返せ」
以下、パイロットが読み返します。 “Squawk 2460, Air System 115” つまり 「トランスポンダー2460、エア・システム115便」
デリバリー管制官は次に、パイロットに地上管制の周波数を通知します。これは航空機のプッシュバックと地上滑行時に使用されます。 “Air System 115, monitor ground 121.7, advise when ready for pushback” 意味は 「エア・システム115、地上管制121.7をモニターせよ。プッシュバックの準備ができたら連絡せよ」 パイロットは「121.7」と簡潔に復唱し、無線機の周波数を121.7MHzに合わせます。
-
旅客機のコックピット探検 1.8 フライト前の手順とコックピット内部
各種のチェックを行い、航空機が耐空性基準を満たしていることを確認した後、ようやくパイロットは操縦席に座り、操縦を開始することができます。まずはフライト前の手続き(フリーフライト前手順)を完了させる必要がありますが、その前にまずコックピットの内部を見てみましょう。
ボーイング747-400のコックピット、オーバーヘッドパネル、電子飛行計器システム(EFIS: Electronic flight instrument system)、操縦装置:


コックピットには通常2つの座席があり、左側が機長席、右側が副操縦士席です。また、折りたたみ可能なデッドヘッド(無料乗員)用の座席が2つあり、これはJump Seatと呼ばれ、訓練、審査、または搭乗などといった内部使用のために用いられます。
オーバーヘッドパネル(Overhead Panel)には様々な電気スイッチが並んでいます。主な用途は、エンジン、APU、燃料、各種航行灯、エアコン、酸素制御などです。下部のEFIS計器システムには以下が含まれます:
MCP(モード制御パネル、Mode Control Panel)、計器盤の上部にある細長いパネルで、主にオートパイロットを制御するために使用します。パイロットは上部の様々なノブやボタンで高度、針路、速度を設定すると、コンピュータが自動的に機体を制御し、様々な姿勢調整を行います。フライト中、パイロットはMCPを頻繁に操作します。
EICAS(エンジン表示及び乗員警告システム、Engine-Indicating and Crew-Alerting System)、計器パネルの中央にある画面で、航空機のエンジンやその他のシステムの動作状態を表示する総合表示システムです。エンジンの回転数(RPM)、温度、燃料容量、油圧、油圧系、空気系、電気系、除氷システム、着陸装置やフラップなどの操縦面などの状態を表示します。
ND(ナビゲーションディスプレイ、Navigation Display)、EICASの両側にあり、機長と副操縦士がそれぞれ固有のNDを持ち、CDUに入力された航空路やウェイポイントなどのナビゲーション情報を表示します。
PFD(プリマリーフライトディスプレイ、Primary Flight Display)、主飛行表示装置で、これも2つあり、機長と副操縦士がそれぞれ固有のPFDを持ちます。主に航空機の姿勢、速度、高度、針路などの飛行に関する情報を表示します。また、MCPで設定されたオートパイロットのモード情報もPFDに表示されます。
マルチファンクションディスプレイ(MFD)、EICAS以外のデータを表示する、または他の計器のバックアップ表示として使用します。
予備計器、EICASと機長のNDの間にあり、飛行姿勢、速度、高度などの情報を提供します。PFDが故障した場合に、パイロットにとってのセーフティネットとなります。(手元に747の写真がないため、下のボーイング737-800の写真を使用します。提供していただいたDreamlinerさんに感謝します。)

操縦装置:
操縦桿、これは一目でわかるように、主に機体の上下のピッチ(水平尾翼)と左右のロール(エルロン、左に旋回する際は左側のエルロンが上がり、右側が下がる。これにより右翼の揚力が左翼より大きくなり、右翼が上がり左翼が下がるため、機体は左に旋回する)姿勢を制御します。 ラダーペダル、尾翼にある方向舵を制御し、ヨー操縦を行います。 スピードブレーキ(Speed Break)、減速板を開きます。 無線機(Radio Control)、無線通信の周波数設定などを行います。 スラストレバー(Trust Lever)、エンジンのスロットルを制御します。 着陸装置(Landing Gear)、着陸装置の格納と展開を制御します。 フラップ(Flap)、揚力を増し、離陸や着陸時に低速でも失速しないようにします。フラップは翼の後縁(または前縁)にある可動翼で、通常は離陸時に5~10度、着陸時に30度下げて使用されます。
以下では、機長と副操縦士が分担して行うフライト前手続きについて簡単に紹介します。 機長はライトのテスト、EFIS制御パネルの設定(高度計、気圧高度など)、MCPの初期設定、酸素装置のテスト、時計の設定、飛行計器の異常表示の有無、MCPの空白設定、予備計器のチェック、スピードブレーキ/スラストレバー/フラップレバーの設定、無線ナビゲーション設定などを実行します。副操縦士がCDUに入力した各種データの確認も非常に重要です。 副操縦士は、各種飛行制御/ナビゲーション/燃料パネルスイッチのチェック、各種電源(客室、旅客座席、ギャレー、予備電源、娯楽設備など)スイッチの設定、火災および過熱保護設定、APUの起動、客室与圧設定、各種ライト、EFIS制御パネル設定、酸素機器設定、飛行計器チェック、着陸装置設定、オートブレーキ設定、エンジン計器チェック、無線ナビゲーション設定などを実行します。
この段階で注意すべき点は、必ず油圧ポンプとフラップを切っておくことです。この時にもし誤操作をすると、地上で作業中の整備員を怪我させてしまう可能性があるからです。また、空港のATIS(空港通報)にある出発時の航空交通管制用の周波数も予めてセットしておきます。羽田のような大きな空港では、離陸後に塔から出域への移管時に周波数を告げることが一般的ではないため、事前に調べておく必要があります。
とにかく、このフライト前手続きを通じて、航空機の各装置を安全にエンジン始動/離陸/上昇/巡航などができる状態に設定します。それと同時に、乗客も搭乗完了し、貨物も搭載完了し、各ドアもすべて閉められます。航空機の重量と重心位置のデータはACARS無線装置を通じてコックピットに送信され、パイロットがそのデータを確認した後、FMSに入力すると、コンピュータがV1などの離陸データを算出します。客室乗務員からも乗客数と客内の準備完了が報告されます。
 上の写真は東京国際空港(羽田)の展望台から撮影したもので、2人のボーイング787-8のパイロットがフライト前手続きを行っている様子が見えます。
上の写真は東京国際空港(羽田)の展望台から撮影したもので、2人のボーイング787-8のパイロットがフライト前手続きを行っている様子が見えます。下図はコックピット内のチェックリストです。破線より上の部分はこの段階で完了させる必要があります。
この時点で、出発してゲートを離れるまであと5分となります。
Prev: 1.7 CDU設定詳解 TOC: 目次 Next: 2.1 出発前5分
完
-
旅客機のコックピット探訪 1.7 FMS CDU設定詳細
フライトシミュレーション愛好家の皆様は、フライトマネジメントシステムの制御表示装置(FMS/CDU)の詳細設定に興味をお持ちのことと存じます。そこで本節では、CDUの初期設定について詳しくご紹介します。
CDUはパイロットがフライトデータを入力するための装置で、大型の電卓のような外観をしており、方形のディスプレイと、数字・アルファベット・ファンクションキーで構成されています。最新の旅客機コックピットには、通常、機長と副操縦士の席の間に3つのCDUが装備されています。以下のボーイング747-400のコックピット画像をご覧ください。

以下の資料は少し古いものですが、1998年発行の<a href=“http://book.douban.com/subject/10810834/"旅客機操縦マニュアル(客机驾驶手册)にあるボーイング737-500型の解説に基づいています。 しかし、大まかな内容は現代の最新鋭機と大きな違いはなく、十分に参考になると考えています。 本書にない図については、理解を深めていただくために、<a href=“http://www.b737.org.uk/fmc.>http://www.b737.org.uk/fmc.htmの画像を直接リンクさせています。
まず電源を投入すると、CDUは自動的に現在位置設定ページ「POSITION INIT」で起動します。<a href="/blog/ja/2012/06/ja-airline_pilot_16"前回の記事で、経度と緯度の入力方法やファンクションキーの使い方を紹介しましたので、忘れた方は復習しておいてください。

6Lキーを押してインデックスページに戻ると、ディスプレイには初期設定と性能のインデックスページ「INIT/REF INDEX 1/1」が表示されます。

1Lキーを押して、次の航空機情報識別ページ「IDENT (identification)」に入ります。
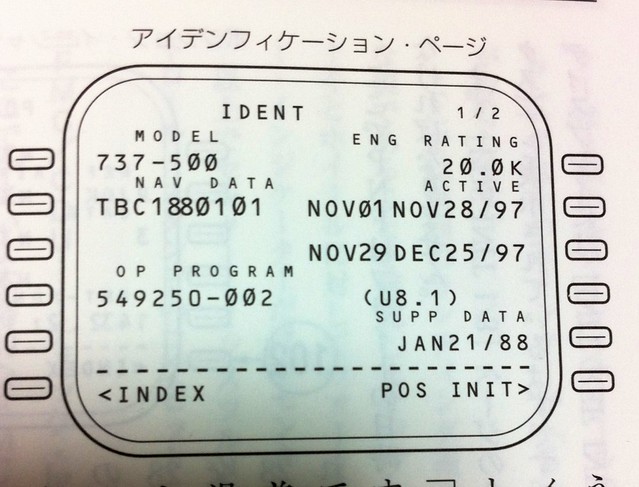 ここで、機種が正しいか、FMC内のナビゲーションデータベースのデータが最新かを確認します。例えば、active(2R)の部分が3Rの部分より古い場合は、3Rキーを押して最新のデータを有効化します。旅客機操縦マニュアルの説明によると、ナビゲーションデータベースは地上職員が28日ごとに更新を担当しています。したがって、上の図にある2Rと3Rのデータの有効期間もちょうど28日間になっているのがわかります。
ここで、機種が正しいか、FMC内のナビゲーションデータベースのデータが最新かを確認します。例えば、active(2R)の部分が3Rの部分より古い場合は、3Rキーを押して最新のデータを有効化します。旅客機操縦マニュアルの説明によると、ナビゲーションデータベースは地上職員が28日ごとに更新を担当しています。したがって、上の図にある2Rと3Rのデータの有効期間もちょうど28日間になっているのがわかります。次に、ファンクションキーの「RTE」を押します(737-500のCPUの画像が見つからなかったので、また747-400で代用します)。
 航路設定ページ「RTE」に入ります。
航路設定ページ「RTE」に入ります。
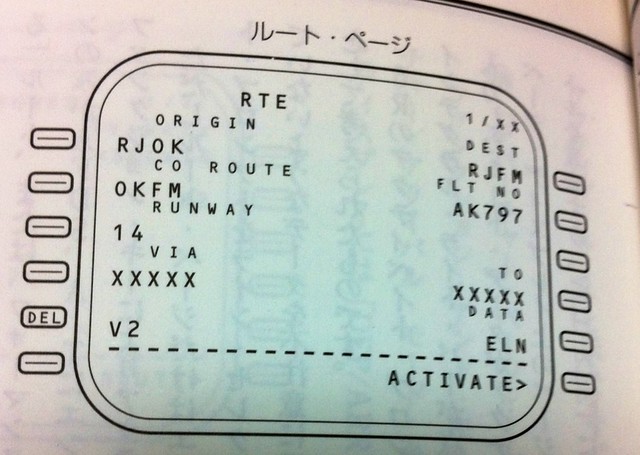 出発地の空港コードRJOK(高知空港)を1Lに、到着地の空港コードRJFM(宮崎空港)を1Rに入力します。
2Lの「CO ROUTE」は航空会社内部の航路番号を意味します。これらのデータはデータベースにあらかじめ保存されているため、パイロットはここでコード「OKFM」を入力するだけです。
次に、離陸する滑走路14番の情報を3Lに、便名AK797を2Rに入力します。
具体的なウェイポイントは航空会社の秘密情報であるため、上の図には表示されていません。
航路上のナビゲーション用のVOR/NDB/ILS/FIXなどのウェイポイントが順に表示されます。
以下の図の通りです。
出発地の空港コードRJOK(高知空港)を1Lに、到着地の空港コードRJFM(宮崎空港)を1Rに入力します。
2Lの「CO ROUTE」は航空会社内部の航路番号を意味します。これらのデータはデータベースにあらかじめ保存されているため、パイロットはここでコード「OKFM」を入力するだけです。
次に、離陸する滑走路14番の情報を3Lに、便名AK797を2Rに入力します。
具体的なウェイポイントは航空会社の秘密情報であるため、上の図には表示されていません。
航路上のナビゲーション用のVOR/NDB/ILS/FIXなどのウェイポイントが順に表示されます。
以下の図の通りです。

 各行の「VIA」と「TO」は一つのフライト区間を表し、<a href="/blog/ja/2012/06/ja-airline_pilot_13"フライトブリーフィング時のNavigation Logに対応しています。
パイロットはこのページで各ウェイポイントの情報に間違いがないか確認します。問題がなければ6Rの「ACTIVATE」キーを押して航路を有効化します。
この時、ファンクションキーの「EXEC」が点灯するので、「EXEC」を押すと航路設定は完了です。ページの表示も「RTE」から「ACT RTE」に変わります。
これにより、フライトコンピュータがLNAV(水平ナビゲーション)、RNAV(垂直ナビゲーション)、A/T(自動スロットル)を制御できるようになります。
各行の「VIA」と「TO」は一つのフライト区間を表し、<a href="/blog/ja/2012/06/ja-airline_pilot_13"フライトブリーフィング時のNavigation Logに対応しています。
パイロットはこのページで各ウェイポイントの情報に間違いがないか確認します。問題がなければ6Rの「ACTIVATE」キーを押して航路を有効化します。
この時、ファンクションキーの「EXEC」が点灯するので、「EXEC」を押すと航路設定は完了です。ページの表示も「RTE」から「ACT RTE」に変わります。
これにより、フライトコンピュータがLNAV(水平ナビゲーション)、RNAV(垂直ナビゲーション)、A/T(自動スロットル)を制御できるようになります。次に出発設定を入力します。離着陸「DEP/APR」ファンクションキーを押すと、「DEP ARR INDEX」画面が表示されます。
 再度1Lを押すと、高知空港の出発手順「RJOK DEPARTURES」画面に入ります。
再度1Lを押すと、高知空港の出発手順「RJOK DEPARTURES」画面に入ります。
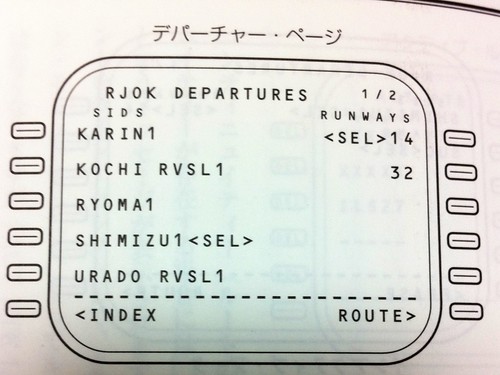
高知空港の出発画面には、まずSID(標準計器出発方式)と滑走路「RUNWAY」の一覧が表示されます。これらはナビゲーションデータにあらかじめ設定されています。 パイロットは決められた設定を選択するだけです。上の図では、4Lの「SHIMIZU1 SID」手順と1Rの「14」番滑走路が選択されているのがわかります。 「
」のマークが表示され、選択されなかった自動データはその後消え、選択されたデータのみが表示されます。以下の図の上部の通りです。  「TRANS」は通過するウェイポイントSUCで、高知空港と宮崎空港の中間に位置しています。
この時、再び「EXEC」キーが点灯します。「EXEC」を押して実行すると、CDUの表示は上の図の下半部のようになります。
先ほどの「
「TRANS」は通過するウェイポイントSUCで、高知空港と宮崎空港の中間に位置しています。
この時、再び「EXEC」キーが点灯します。「EXEC」を押して実行すると、CDUの表示は上の図の下半部のようになります。
先ほどの「」の部分が「 」に変わり、正式に有効化(アクティベート)されました。 この時点で、再度ファンクションキーの「RTE」を押して、SIDなどの情報が航路に反映されているか確認できます。 次は、航路上の各点が正しく接続されているか確認します。 「LEGS」ファンクションキーを押して「ACT RTE LEGS」画面を起動し、「PREV PAGE」および「NEXT PAGE」キーで前後にページをめくります。 もし途中で途切れている箇所があると、以下の図のように表示されます。
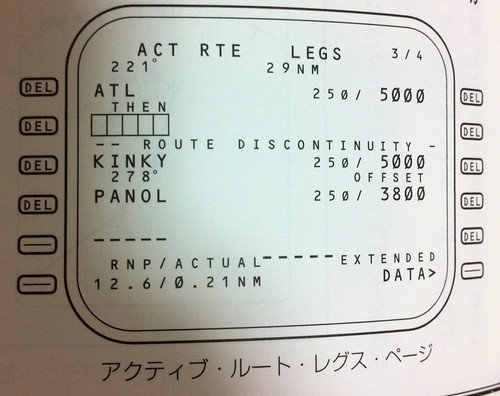 途切れている箇所に四角い枠が表示され、「ROUTE DISCONTINUITY」のエラーメッセージが表示されます。
パイロットは、エラーメッセージの下にあるウェイポイントを選択して、簡単に接続することができます。
また、修正後は画面表示が「ACT RTE LEGS」から「MOD RTE LEGS」に変わり、再度「EXEC」キーが点灯するので、押して設定を完了させます。
途切れている箇所に四角い枠が表示され、「ROUTE DISCONTINUITY」のエラーメッセージが表示されます。
パイロットは、エラーメッセージの下にあるウェイポイントを選択して、簡単に接続することができます。
また、修正後は画面表示が「ACT RTE LEGS」から「MOD RTE LEGS」に変わり、再度「EXEC」キーが点灯するので、押して設定を完了させます。 -
X-Plane 10.10の開発状況について
数ヶ月前に 10.5-rc1 にアップグレードして以来、X-Plane 開発チームのアップデートのペースが止まってしまったようです。より多くのシーナリーや航空機のアドオン開発者をサポートするため、現在はサードパーティ向けの開発ツールに主眼を置いているのだとずっと思っていました。
しかし、彼らは先ほど開発<a href=“http://developer.x-plane.com/2012/06/were-still-here-really/"ブログを更新し、新しいバージョン 10.10 の状況を明らかにしたようです。
個人的に気になった点は以下の通りです:
- 10.10 のリリース日程はまだ未定で、まだバグが多い模様です
- 今回のバージョンはまだ 64 ビットプログラムではありません
- 機体選択とフライト設定の UI が変更されます
- 道路の表示がよりリアルになります
- システムの安定性が改善され、10 時間連続で運用してもプログラムが異常終了しなくなります
- ジョイスティック等のハードウェアの低レベルソフトウェアが書き直され、フライト中に新しいデバイスを插拔しても認識するようになります(現在は X-Plane の再起動が必要です)
最新バージョンの早日のリリースを期待しましょう。
完
-
X-Plane 10/11における飛行経路の検索と設定方法のまとめ
ユーザーの"CALL..ME..V!“さんから、X-Planeでフライトプラン を作成する際の航路設定について質問がありましたので、以下に簡単にまとめてみました。お役に立てれば幸いです。
0 フライトプランの提出方法について
ATC航空管制的使用方法 を参照してください。
1 課題
X-Planeには多数の空港、滑走路、そして無線航法施設(DME、VOR、NDB、ILS)の情報が組み込まれており、多くのウェイポイント情報も優れていますが、一般の航空会社が使用するウェイポイント情報の網羅率はそれほど高くありません。そのため、インターネットで検索した航路をX-PlaneのFMCに入力するとエラーになることがあります。
2 既存の航路を検索する方法
2.0 simbrief.com
今のところ最高のツールであり、強くおすすめします。本サイトの記事<a href="/blog/ja/2013/12/-simbriefcom"史上最强航路查询工具 simbrief.comを参照してください。
2.1 Route Finder
私自身、“CALL..ME..V!“さんと同様、普段はこの無料ウェブサイト Route Finderを参考にしています。 <a href=“http://rfinder.asalink.net/free/"http://rfinder.asalink.net/free/
しかし、ここで提供されるフライトプランのデータには、X-Planeでサポートされていないウェイポイントが多く含まれています。例えば、香港から広州への “VHHH SID BEKOL A461 IDUMA W22 SHL STAR ZGGG” というコードにおいて、SIDはもちろんサポートされていませんし、BEKOLやSHLなどもサポートされていないようです。そのため、使用可能なもの以外を削除してしまうとほとんど残らず、あまりリアルではない感じがしませんか?
2.2 vataware
<a href=“http://www.vataware.com/"vatawareのウェブサイトには、多くのフライトシミュレーターユーザーがログインした航路があります。具体的な使用方法もとても簡単で、同サイトのホームページ左側の「Top Routes」メニューをクリックすると、出発空港と到着空港の入力欄が表示されます。VHHHとZGGGを入力すると下の図のようになります。

「Go」ボタンをクリックすると、以下の結果が得られます。
-thumb-640x350.png)
2.3 AIRCN全球航路查询系统
これは中国語の航路検索システムで、完全に中国語のインターフェースであり、中国語の使用説明書もあります。データもかなり充実しており、おすすめです。中国語の資料は完備されているので、ここではこれ以上詳しく説明しません。詳細は以下のリンクをご覧ください。
AIRCN全球航路查询系统 V2.0 <a href=“http://www.aircn.org/bbs/thread-61797-1-1.>使用方法
-
旅客機操縦の探秘 1.6 コックピットの準備作業
機長が地上で外部検査を行っている間、副操縦士ももちろん手を休めてはいません。彼はフライト前の予備手順とCDUのフライト前手順を完了する必要があります。 以下では、これらの作業について簡単に紹介します。
副操縦士は、まずコックピットで各種書類を検査します。 車には車検証が必要であるように、航空機にも航空機耐空年検が必要であり、耐空証明書のない航空機を飛ばすことはできません。 フライト日誌や整備記録には、航空機のすべてのフライト記録と整備記録が記録されており、これらの書類も絶対に欠かすことはできません。
次に、フライト準備会(ブリーフィング)で決定された燃料量が給油されているかを確認する必要があります。 その他、消火器、信号弾、懐中電灯、救急斧、脱出ロープ、救命胴衣、耐火アスベスト手袋、防火防煙フードなどの各種緊急機器も検査項目です。 救急斧は窓を破壊するために使用でき、脱出ロープは空港の天井に掛けられているロープです。不時着などの予期せぬ事態が発生し、ドアから脱出できない場合、天井の非常脱出口を開け、ロープを窓の外に投げ入れてから窓から外に出て、そのロープを伝って避難します。
 上の図は、ボーイング737のコックピット側窓非常口における緊急脱出の手順を示した図解です。
上の図は、ボーイング737のコックピット側窓非常口における緊急脱出の手順を示した図解です。その他、テストスイッチが正常に動作するか、降着装置(ランディングギア)の降下、フラップの位置が準備できているか、エンジン潤滑油量、酸素圧などの初期設定もあり、非常に長い項目があるため、ここでは逐一列举すると退屈になるので割愛します。
現代の旅客機はすべて自動飛行管理機能を備えており、離陸、上昇、巡航、降下から最後の着陸まですべてコンピューターの制御によって自動的に行うことができることを知っています。その中で、飛行姿勢の制御は慣性航法システム(IRS)が担当します。パイロットは離陸前にIRS慣性基準システムを校正(アライメント)して、ナビゲーションをより正確にする必要があります。 慣性航法がどのようにジャイロと加速度計を用いて行われるかという原理については、今後機会があれば別に項目を設けて説明します。
校正設定は、FMSのCDUを通じて入力を行う必要がありますが、ではFMSとCDUとは何でしょうか?
FMS(Flight Management System:フライト管理システム)は、フライト管理コンピューターを中核とする航法・誘導および性能管理システムです。 エンジンが航空機の心臓部であると言われるなら、FMSは航空機の脳と言えるでしょう。 前述したIRSもFMSフライト管理システムの一部であり、コンピューターに針路情報を提供しています。 そしてCDU(Control Display Unit:制御表示装置)は、パイロットが重量、航空路など、飛行に必要な各種情報を入力するために使用します。そうすれば、コンピューターは離陸速度、エコノミースピード、巡航高度、エンジンの推力を自動計算し、各種制御指令を自動操縦および自動スロットルシステムに送信して、自動飛行を完了します。 例えば自動モードに入ると、ボーイング機のスロットルと操縦桿は自動的に前後左右に動き、まるで見えない手が操縦しているかのようになります。 FMSによってパイロットの操作負担は大幅に軽減され、各種機内機器の監視、航空交通管制の聴取、空中の交通状況および気象状況の観察により多くの時間を割くことができ、飛行の安全性が極めて高まりました。
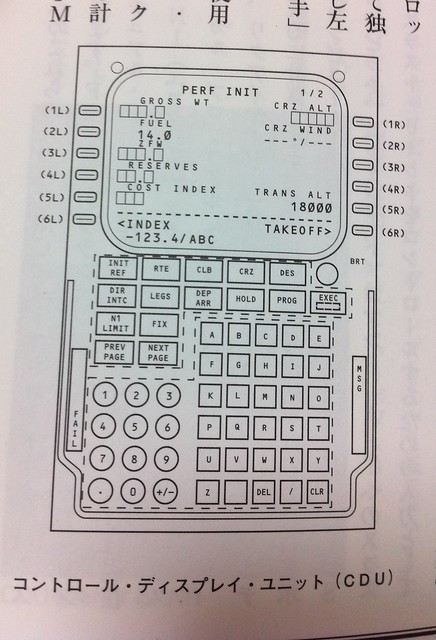 上図のように、CDUは画面、画面の左右に6つずつのボタン、および下にあるファンクションキー、英数字キーボードで構成されています。
画面の左側のボタンは上から順に1L、2L、3L、4L、5L、6Lと呼ばれ、
同様に右側のボタンは1R、2R、3R、4R、5R、6Rと呼ばれます。
それぞれのボタンは入力項目またはコマンドに対応しており、そのボタンを押すことは、そのコマンドを選択して実行すること、または英数字キーで入力した後のエンターキーを押すことに相当します。
上図のように、CDUは画面、画面の左右に6つずつのボタン、および下にあるファンクションキー、英数字キーボードで構成されています。
画面の左側のボタンは上から順に1L、2L、3L、4L、5L、6Lと呼ばれ、
同様に右側のボタンは1R、2R、3R、4R、5R、6Rと呼ばれます。
それぞれのボタンは入力項目またはコマンドに対応しており、そのボタンを押すことは、そのコマンドを選択して実行すること、または英数字キーで入力した後のエンターキーを押すことに相当します。
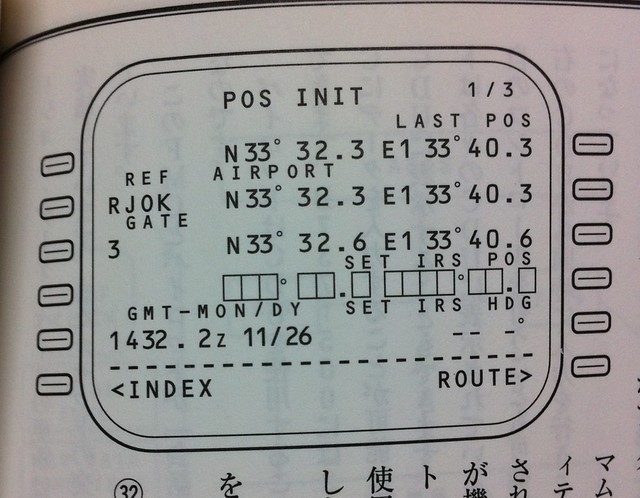
CDUへの初期データ入力には、機体タイプ、ナビゲーションデータベース、システム時刻の確認が含まれ、その後、現在の駐機場(ゲート)の現在地の緯度経度を入力して慣性航法システムの校正を完了します。 一般的に、駐機場のコックピットの正面には、現在地点の緯度経度を表示した標識があり、パイロットは顔を上げるだけでこのデータを見ることができます。下の図は、成田空港のあるゲートの表示です。

CDUの入力例は以下の図の通りです。現在の空港RJOK日本高知空港(2L)、3番ゲート(3L)、現在時刻(5P)、空港の緯度経度(2R)、3番ゲートの緯度経度(3R)の情報が入力されています。
 その後は、便のナビゲーションデータ、例えば便名、空港、航空路、滑走路などを入力します。
性能入力(PERF INIT)では、無燃料重量、燃料量、エンジン回転数N1の制限、重心(CG)などのデータを入力する必要があり、コンピューターは離陸時に必要ないくつかの重要な速度データ、V1、Vr、V2を計算します。
その後は、便のナビゲーションデータ、例えば便名、空港、航空路、滑走路などを入力します。
性能入力(PERF INIT)では、無燃料重量、燃料量、エンジン回転数N1の制限、重心(CG)などのデータを入力する必要があり、コンピューターは離陸時に必要ないくつかの重要な速度データ、V1、Vr、V2を計算します。V1は離陸決心速度と呼ばれます。離陸時に滑走して加速し、V1に達する前に、機長がエンジン停止や回転数不足などの異常を感じた場合、離陸を中止(RTO)すべきです。V1速度よりも前であれば、航空機を減速させれば、現在の滑走路内に停止させることができるからです。 しかし、もし対気速度がV1を超えている場合、現在の滑走路長では航空機を停止させるのに十分な距離がなくなってしまいます。そのため、いかなる情况でも離陸を継続し、空中に上がってから検討と対処を行います。
Vrはローテーション速度です。この速度の前は、航空機はまだ地上での滑走状態を維持していますが、Vrに達した後、機長は操縦桿を引き(ローテーション)、機首が上がり、10〜15度の機首上げ姿勢(ピッチ角)を保って空中へ上昇します。
V2は安全離陸速度です。航空機が離地した後、姿勢角を適切に調整してV2までできるだけ早く加速し、その後標準的な上昇速度まで加速を継続します。
MCP(Mode Control Panel:モード制御パネル)に関しても、標準出発手順(SID)のコース番号をあらかじめ設定し、オートスロットルとフライトディレクター(FD)をOFFにし、対気速度(IAS/MACH)を設定し、針路(HEADING)を滑走路方向に、高度(ALTITUDE)をフライトプランの高度に設定するなど、事前に設定を行う必要があります。

ここでコックピットの準備手順はほぼ整い、機長と副操縦士はフライト前手順(航空機を正式に飛行状態に移行させる)を開始することができます。
<a href=Prev: 1.5 航行前地上検査 TOC: 目次 <a href=/2012/06/airline-pilot-17-cdu.">Next: 1.7 CDU設定詳解
完
-
旅客機のコックピット探検 1.5 離陸前地上チェック
パイロットが機体に到着する前に、地上勤務員はすでに飛行前点検を完了しています。
一般的に、航空機のメンテナンス管理は定期的な検査と運航整備(ラインメンテナンス)に分けられます。 運航整備には、発航前、到着後、およびトランジット(定時運航折り返し)時のメンテナンス作業が含まれます。 発航前点検には、2名の地上勤務員が約1時間を費やし、タイヤの空気圧、脚、電子機器の通電確認などを行い、航空機が完全な状態で耐空性の要件を満たしていることを確認します。
定期検査とは、航空機の運用時間が特定の基準期間に達した際に行わなければならない検査およびメンテナンス作業です。 例えば、飛行500時間ごとに機体とエンジン全体の大まかな検査を行います。これには20名の要員で6時間を要し、この検査の周期は約1.5ヶ月に1回です。 飛行4000時間ごとには、航空機の各サブシステムに関する詳細な検査を行い、これは約1年に1回実施されます。
地上勤務員は機内バッテリーを使用してAPU(Auxiliary Power Unit、補助動力装置)を始動させ、 その後、様々な計器や照明機器の点検を行います。
APUは小型のタービンエンジンで、通常は胴体後部のテールコーン内に搭載されています。 APUには独自の始動モーターがあり、専用のバッテリーで電力を供給し、機内の燃料を使用して稼働します。APUの機能は、航空機が地上に停泊している際に、各種計器や照明機器に電力を供給し、機内に空調を提供すること、そして航空機のジェットエンジンを始動するための圧縮空気を提供することです。航空機のエンジンが始動すると、電力と空調はエンジンから供給されるため、この時点でAPUは停止することができます。 しかし、もし空中でのエンジン停止事故が発生した場合、APUはエンジンの再始動における主要な装備となります。 下図は、ウィキメディア・コモンズが提供するエアバスA380の補助動力装置(APU)の排気管の写真です。

APUは燃料を使用するため、長時間の稼働による騒音や排気ガスの排出は環境への影響が大きいため、現在多くの空港では搭載ブリッジ装備(GPU)を使用して航空機に電力と空調を提供しています。これにより、航空会社は燃料消費を削減でき、空港も一酸化炭素、炭化水素、窒素酸化物などの排出ガスを削減することができます。
地上勤務員が点検を完了すると、パイロットも操縦席に到着し、航空機の整備状況や燃料、潤滑油の量など、航空日誌に記載された項目が一つ一つ引き継がれます。例えば、ある電球が交換されたとしても、そのことが記録され、理由が記されます。
その後、機長は搭乗橋の横にある高さ約5メートルの梯子を使って地上に降り、航空機の周回点検を行います。

周回点検は、主に航空機の外部サブシステムを目視で点検するもので、機体を時計回りに一周し、項目と手順は基本的に以下の通りです。
外観に異常はないか、表面に損傷はないか、各操縦翼面に障害物はないか、地上に石や忘れられた工具など、あってはならないものが存在しないか(もし前方にこれらの異物がある場合、エンジン始動後に発生する強力な吸引力がそれらを吸い込み、結果としてエンジンを損傷させる原因となります)
前脚 輪止め(チョック)は正しく設置されているか レドーム 右側胴体下部、主翼下部の外皮、フラップ、エルロン 右側主脚、タイヤ、ブレーキ、輪止め 右側エンジンカウルは正しくロックされているか 右側エンジン吸気口内に異物はないか 右側エンジンファンブレードに損傷はないか、下部に油漏れの跡はないか 右側エンジン後部に異物や燃料の付着はないか 尾翼、方向舵 左側胴体下部、主翼下部の外皮、フラップ、エルロン 左側主脚、タイヤ、ブレーキ、輪止め 左側エンジンカウルは正しくロックされているか 左側エンジン、項目は右側に同じ
また、航空機の胴体には多くのアンテナがあり、これも点検の重要な内容です。もしアンテナが損傷し、地上の航空交通管制との通信が正常に行えなかったり、様々なナビゲーション情報を取得できなかったりすると、飛行は極めて危険なものとなります。
 上記は、私が長崎空港で撮影した、地上点検を行っているパイロットの写真です。
上記は、私が長崎空港で撮影した、地上点検を行っているパイロットの写真です。
インターネットで上海航空股份有限公司の中国語版ボーイング737運用マニュアルを見たことがありますが、外部点検の部分だけで6ページもの内容がありました。詳細な内容に興味がある場合は、参考にしてみてください。
ボーイング747-400旅客機の周回点検には、15分近くかかるそうです。巨大な機体(全長70メートル以上、翼幅約65メートル)であるため、一周する距離が長いことも理由の一つです。 飛行の安全を確保するため、専門の地上勤務員が整備を行った後でも、規則によりパイロットも必ず自ら目視点検を行い、多重チェックを行うことで万全を期することが求められています。
外部点検を完了した機長は、再び梯子を使って機内に戻り、操縦席の点検を開始します。 この時点で航空機が搭乗橋を離れるまで約20分程度となり、同時に空港内の放送でも乗客の搭乗準備を開始する旨が通知されます。
<a href=/blog/ja/2012/06/ja-airline_pilot_14">Prev: 1.4 乗員ブリーフィング TOC: 目次 <a href=/blog/ja/2012/06/ja-airline_pilot_16">Next: 1.6 操縦席の準備作業
完
-
X-Plane 10 小型機のオートパイロト 入門
X-Plane 11が登場しました。最新の記事<a href="/x-plane10/2016/11/installing-x-plane-11-demo.>X-Plane 11無料デモ版のインストールと試飛行をご覧ください!
X-Planeのオートパイロット機能はシンプルで使いやすく、おすすめです。以下に使い方を簡単にまとめます。 今日はまず小型機の使い方を紹介します。例によってCessna 172(セスナ172)を使用します。 画像が小さめかもしれませんが、クリックして拡大表示するのを忘れずに。
まず、オートパイロットを起動する方法は下図をご覧ください。Flight DirのツマミをAUTO位置に合わせるだけです。とても簡単でしょう? <a href=“https://yinlei.org/x-plane10/2012/06/24/auto1.jpg"

針路の制御も非常に簡単です。 HDGボタンを押し、方位ツマミを調整して黄色い矢印を進みたい方向に向けると、機体は自動的に旋回を始めます。 なんと楽なんでしょう。 <a href=“https://yinlei.org/x-plane10/2012/06/24/auto2.jpg"

HDGのボタン列の一番右にあるALTボタンは高度の固定(ロック)です。機体が希望する高度に達した後、 ALTを押してオートパイロットにこの高度を記憶させます。以降、風がどれほど強く、機体が揺れようとも、 高度の調整やトリム調整に気を遣う必要はありません。何しろすべて自動で行われるのですから。
上記の2つの操作をマスターすれば、自動巡航はあなたにとってお茶の子さいさいではないでしょうか? 飛行姿勢はコンピューターが管理してくれるので、あなたは美しい景色を心ゆくまで堪能できます。 以前X-Plane 9で遊んでいた頃、1ヶ月以上かけてアメリカ大陸横断をやったことがあります。 西海岸から東海岸まで、毎日少しずつ飛行し、 離陸後にオートパイロットをオンにして、あとは各地の景色を眺めているだけでした。
次に、もう少し難しい操作を紹介します。ILS(計器着陸システム)を利用して、Cessna 172で盲降を行う方法です。 着陸は初心者にとって最も難しい操作でしょう。 しかしオートパイロットがあれば、着陸のプロセスは非常に簡単になります。覚えてしまえば、もう二度と機体を墜落させることはないでしょう。
まずマップモードを開き、着陸したい空港の滑走路のILS無線信号周波数を確認します。 例えば下図のように、羽田空港(RJTT)の34R滑走路に着陸しようとしているとします。 <a href=“https://yinlei.org/x-plane10/2012/06/24/auto3.jpg"
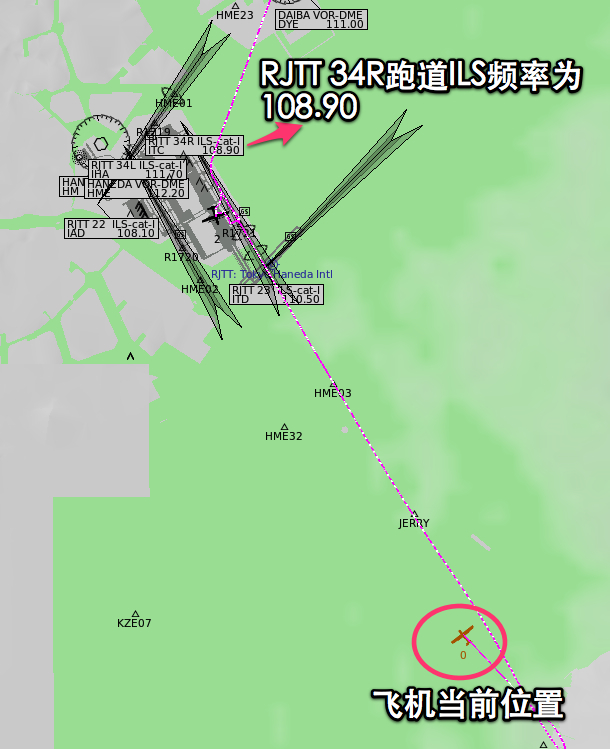 その周波数は108.90です。
私はNAV1でILS信号を受信するので、まず108.90に合わせます。下図の通りです。
<a href=“https://yinlei.org/x-plane10/2012/06/24/auto4.jpg"
その周波数は108.90です。
私はNAV1でILS信号を受信するので、まず108.90に合わせます。下図の通りです。
<a href=“https://yinlei.org/x-plane10/2012/06/24/auto4.jpg" 次にLOCとG/Sボタンを押すと、機体が自動的に機首を滑走路の方位に向け始め、
OBS1を調整して針が滑走路の340度の方角を指すようにします。縦横の2本の線がちょうど中央に来ているのが見えますね?
盲降は本当に便利だと思いませんか?
この時、あなたがやるべきことはフラップを下ろし、スロットルを絞って機体の高度を下げ続け、
OBS内の横線(グライドスロープ)が常に中央を指すようにすることだけです。
次にLOCとG/Sボタンを押すと、機体が自動的に機首を滑走路の方位に向け始め、
OBS1を調整して針が滑走路の340度の方角を指すようにします。縦横の2本の線がちょうど中央に来ているのが見えますね?
盲降は本当に便利だと思いませんか?
この時、あなたがやるべきことはフラップを下ろし、スロットルを絞って機体の高度を下げ続け、
OBS内の横線(グライドスロープ)が常に中央を指すようにすることだけです。



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}