旅客機の操縦を探る 3.5 オートパイロットの作動
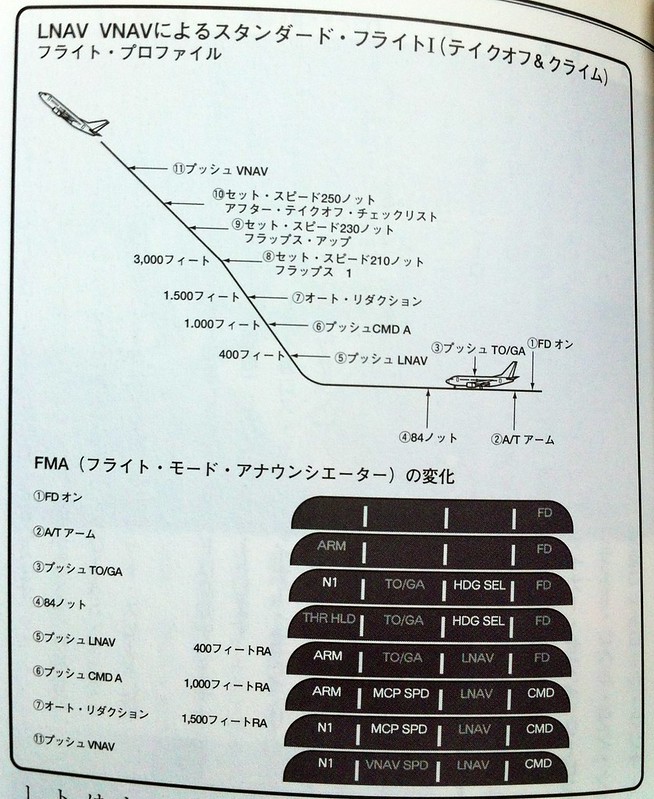
機体は上昇を続け、無線高度計の数値が400フィート(旅客機操縦マニュアルの737-500を例にします)を超えました。
ここで水平ナビゲーション LNAVモードを入力できます。機長は副操縦士にMCPのLNAVボタンを押すよう指示します。

すると、PFDの左上のモード欄で、針路設定がHDG SELからLNAVに変わり、飛行モードは下図の第5段階に入ります。
LNAVはLateral Navigationの略称で、水平ナビゲーションを意味し、機体が事前に設定された航空路に沿って水平面上で自動飛行することを制御できます。 LNAVの原理は、まず慣性航法装置IRS(機上のレーザージャイロを用い、ドップラー効果から機体の加速度を得る)を利用し、 時間積分によって現在の速度と位置を算出します。その後、地上の無線ナビゲーション施設(VOR、DME、ILS/DME、VORTAC、TACANなど)またはGPSから得られる位置データと組み合わせ、 フライトマネジメントコンピュータFMCがこれらすべてのデータを統合します。つまり、FMCはIRSの誤差を各ナビゲーション施設のデータで絶えず修正し、機体が正しい航空路を飛行するよう制御します。
MCPでLNAVキーが押されると、PFD上のフライトディレクターFDはFMCの指示に従い、事前に設定された航空路に基づいてパイロットをナビゲートします。 パイロットはFDに従って機体を操縦すれば、横風があっても航空路から逸脱することはありません。 这是因为FMC会根据天气计算出风向修正角WCA(Wind Correction Angle),WCA也会被集成到飞行指令条FD上,所以飞行员驾驶时只要专注于FD就可以了。
与此同时,油门控制模式也发生了变化,绿色的THR HLD变为了白色的ARM, 也就是说飞机升到400英尺,并且离地18秒以后,发动机自动推力锁定模式就被解除, 发动机推力进入随着爬升高度而自动减少的状态。
飞机高度超过事先决定好的机场对地高度(比如1000英尺)以后,飞行员就可以打开自动驾驶模式A/P。
737上有两台自动驾驶仪,左边的为A,右边的为B,一般来说机长会指示副驾驶使用左侧,按下MCP中右侧的A/P ENGAGE 部分的CMD A键,
 于是飞行员的手就可以脱离操纵杆或操纵盘,飞机的各个舵面的控制就都交给计算机处理了。
于是飞行员的手就可以脱离操纵杆或操纵盘,飞机的各个舵面的控制就都交给计算机处理了。
这样PFD上的左上方模式栏里自动驾驶设定由FD变为绿色的CMD,同时俯仰控制部分的模式也从TO/GA
变为MCP SPD,飞行模式进入下图中的第6阶段。
MCP SPD意味着现在飞机的速度将由MCP上中央处的IAS/MACH旋钮来控制,
而飞行员将会根据飞行中不同阶段不断调整这个速度。
自动驾驶模式中,飞机忠实按照CDU中输入的航路,不断转弯向下一个航路点飞去。
超过气压高度1500英尺以后,推力模式自动从减推力起飞设定转变为爬升减推力,
飞机发动机的声音也比起刚才安静了一些。
PFD上的左上方模式栏里自动推力模式从白色的ARM变为绿色的N1模式,飞行模式进入下图中的第7阶段。
<a href=Prev: 收轮GEAR UP
TOC: 目录 <a href=Next: ATC移交离场管制,进入VNAV模式完