コックピットの中
-
旅客機操縦の秘密6.10 エンジン停止手順
機体が完全に停止し、パイロットは最後のエンジン停止手順を開始し、まずパーキングブレーキを設定します。
機長はラダーペダル先端のブレーキペダルを完全に踏み込み、同時にコンソール後部左下にあるパーキングブレーキレバーを引き上げます。 すると、レバーの右側にある赤いパーキングブレーキ警告灯が点灯し、ブレーキが正常に作動していることが確認できます。 これで機長は両足をラダーペダルから離しても大丈夫です。
以下はボーイング737の操縦席の写真です。スロットルレバー左下にあるパーキングブレーキレバーと警告灯が見えます。

副操縦士は機長がパーキングブレーキを設定したことを確認した後、APU電源が必要であれば、オーバーヘッドパネルのAPU電源を再度確認し、 APU発電機バスバーのスイッチがON(接続)の位置にあることを確認します。 電源の投入を確認せずにエンジンの電源を切ってしまうと、機内はバッテリー供電のみとなり、 非常口灯以外の照明はすべて消灯し、客室はパニックになるでしょう。
外部電源が必要な場合、副操縦士は地上電源使用可能(GRD POWER AVAILABLE)ランプが点いているか確認します。 もしこの青いランプが点いていれば、地上整備員がすでに地上電源ケーブルを機体に接続しており、 電源が利用可能になると、この青いランプは自動的に点灯します。 副操縦士は問題ないことを確認したら、地上電源スイッチをON(接続)にします。 APUを使用しても地上電源を使用しても、副操縦士はソースオフ(SOURCE OFF)ランプが消灯していることを確認する必要があります。
 上の写真で、地上電源ケーブルが接続されているのが確認できます。
上の写真で、地上電源ケーブルが接続されているのが確認できます。次にエンジンをカットオフ(CUTOFF)する必要があります。副操縦士は人差し指と中指を左右のスタートレバーの下に伸ばし、 2つのレバーを同時に上に引き上げ、その後ろの停止位置まで引きます。 これによりエンジンの燃料系統と点火系統が同時に遮断され、エンジンが停止します。
 客室の心ある乗客はこの時、普段は小さいが低く響いていたノイズが止まり、機内がより静かになったことに気づくはずです。
客室の心ある乗客はこの時、普段は小さいが低く響いていたノイズが止まり、機内がより静かになったことに気づくはずです。ボーイング737の運用マニュアルによると、 「可能であれば、高推力での運転(逆推力を含む)後は、エンジンの熱部品を冷却するために、停止前にアイドル、またはそれに近い状態で3分間運転してください。 停止前の地上滑走(タキシング)中のアイドル、またはそれに近い時間はこの3分間に含めることができます。 必要であれば、エンジンは1分間の冷却後にも停止可能です。 停止前の冷却時間が3分未満になることは推奨されません。」 一般的なフライトでは、タキシングと搭乗橋への到着時間を合わせれば、この条件を満たしていることがほとんどです。
次のステップは、副操縦士が衝突防止灯スイッチを切ることです。 エンジン稼働中はこのライトを点灯しておく必要があるため、 衝突防止灯が消えると、地上担当者は操縦席でのエンジン停止操作が完了したことを知ることができます。 その後、不要な燃料ポンプスイッチを切りますが、これも同様に副操縦士が操作します。
次は、そう、実はここから先の操作は基本的に様々なスイッチ類のオン/オフであり、以下が含まれます: ・ギャレー電源スイッチを閉じる ・シートベルト着用サインスイッチを閉じる – これで待機していた乗客はようやく立ち上がり、手荷物入れを開けて荷物をまとめ、飛行機を降りる準備ができます。ただ、パイロットはまだしばらく忙しいです。 ・ウイング・アンチアイス( Wing Anti-Ice )スイッチを閉じる(OFF) ・エンジン・アンチアイス( Engine Anti-Ice )スイッチを閉じる(OFF) ・電動油圧ポンプ(ELEC HYD PUMPS)スイッチを閉じる(OFF) ・再循環ファン( RECIRC FAN )スイッチを閉じる(OFF) ・エアコンパック(AIR COND PACK)スイッチ(AUTO) – エアコンを切るのではなく、AUTOにします。これは機内でまだ空調が必要であるため、AUTOに切り替えると左側のパックから供給され、右側パックの動作が停止します。これにより、機体右側で作業する地上員、例えば後部貨物ドアで荷下ろしをする担当者は、エアコン排気口から排出される大量の熱気の下で作業する必要がなくなります。
 ・エンジンブリードエア(ENG BLEED)スイッチを入れる(ON)
・APUブリードエア(APU BLEED)スイッチを入れる(ON)
・車輪止め(輪档)が設置されたらパーキングブレーキを解除する
などなど。
・エンジンブリードエア(ENG BLEED)スイッチを入れる(ON)
・APUブリードエア(APU BLEED)スイッチを入れる(ON)
・車輪止め(輪档)が設置されたらパーキングブレーキを解除する
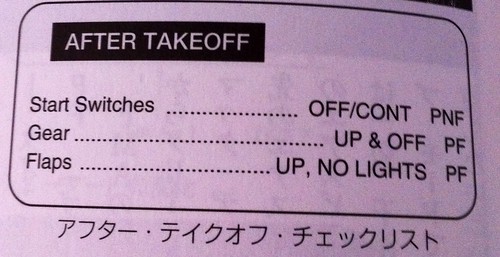
などなど。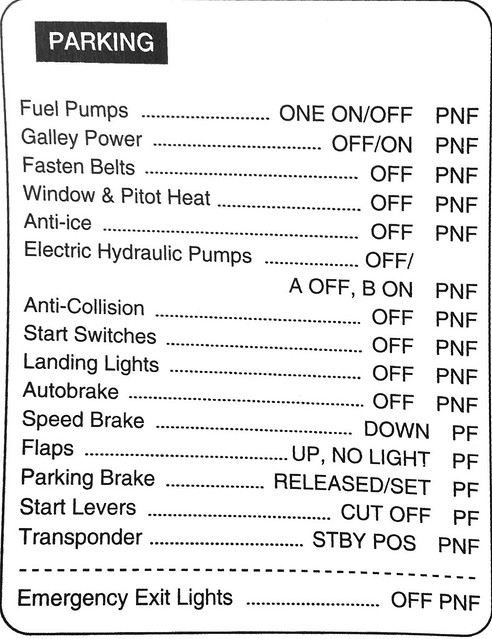 次に機長が「エンジン停止チェックリスト」を唱和し、副操縦士がチェックリストの各項目を実行します。
具体的には一つずつ解説しませんが、上の写真のボーイング737-500型のエンジン停止チェックリストを参照してください。
次に機長が「エンジン停止チェックリスト」を唱和し、副操縦士がチェックリストの各項目を実行します。
具体的には一つずつ解説しませんが、上の写真のボーイング737-500型のエンジン停止チェックリストを参照してください。
ここまで実行すると、すべての乗客も降機し、客室乗務長(パーサー)が操縦席に来て、機長へ 客室内に異常がないか報告します。
-
旅客機の操縦探秘6.9 搭乗橋に到着
この連載は半年以上更新していませんでしたが、申し訳ありません。 先日、搭乗橋(搭乗橋)への誘導を行うエプロンの誘導員( marshaller)の写真を撮ることができました。 搭乗前とはいえiPhoneで撮ったものですが、結果は満足のいくものでしたので、ようやく更新を再開できます。
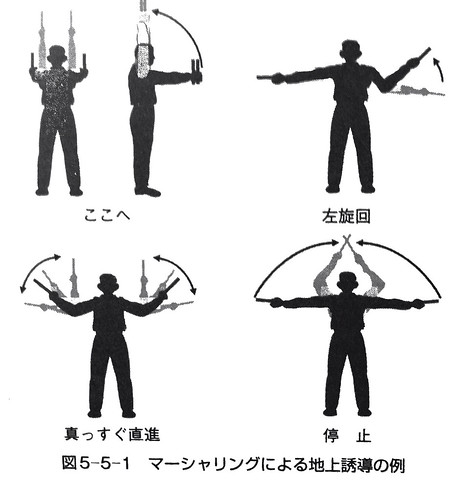
まず、誘導員がイエローパネル(手信号板)を持って誘導する際の一般的なジェスチャーを見てみましょう。
 パイロットの視点から見ると、
例えば機体を左に**旋回**させるよう誘導する場合、上の図の右下の例に示すように、
誘導員は右腕を水平に伸ばし、左腕を絶えず上下に振ります。
その振る速度は、パイロットが調整すべき**旋回**率の大きさを伝えます。
パイロットは誘導員のジェスチャーを注意深く観察し、そのリズムに合わせて、
スムーズに操縦輪(ノーズホイール・ステアリング)を操作し、機体を**誘導路**(lead-in line)の真上に保って**滑走**します。
パイロットの視点から見ると、
例えば機体を左に**旋回**させるよう誘導する場合、上の図の右下の例に示すように、
誘導員は右腕を水平に伸ばし、左腕を絶えず上下に振ります。
その振る速度は、パイロットが調整すべき**旋回**率の大きさを伝えます。
パイロットは誘導員のジェスチャーを注意深く観察し、そのリズムに合わせて、
スムーズに操縦輪(ノーズホイール・ステアリング)を操作し、機体を**誘導路**(lead-in line)の真上に保って**滑走**します。
次の写真は、A320機を左に旋回させるよう誘導されているエプロンの誘導員を撮影したものです。 場所は大阪の関西国際空港です。

手元の「旅客機操縦マニュアル(客機駕駛手冊)」という本によると、 パイロットは地上での滑走速度を5ノット(knots)以下に保つべきであり、 また、ステアリング操作は穏やかに行う必要があります。なぜなら、急すぎる操舵では、 客室の乗客が左右の揺れを感じ、非常に不快になるからです。 一方、熟練したパイロットの操作であれば、乗客は機体が地上で左右に調整されていることを感じさせません。
機体が搭乗橋の方向に向いた後、誘導員は前進方向の微調整を続けます。 下の図のように、
 前輪はほぼ誘導路上にありますが、まだ少し右側への調整が必要です。
そのため、誘導員は右腕をゆっくりと振り、機体が完全に搭乗橋の方向に合うよう誘導します。
前輪はほぼ誘導路上にありますが、まだ少し右側への調整が必要です。
そのため、誘導員は右腕をゆっくりと振り、機体が完全に搭乗橋の方向に合うよう誘導します。機体が搭乗橋に接近すると、誘導員は両手を高く上げ、 左右にゆっくりとイエローパネルを振り、上の図の左下に示すように、機体をゆっくりと前方へ滑走するよう誘導します。

振る速度が一定であれば、パイロットは現在の速度を維持する必要があることを意味し、 振る速度が速くなれば、パイロットは適度に速度を上げる必要があることを意味します。 逆に、振る速度が徐々に遅くなれば、速度が少し速すぎることを意味するため、パイロットは適度に減速する必要があります。 パイロットはこの時、ブレーキを軽く踏み、誘導員の両腕の動きに合わせる必要がありますが、 絶対に機体を停止させてはなりません。 なぜなら、慣性のために、巨大な旅客機は一度停止してしまうと、 再びスロットルを開けて前進するための推力を得る必要があり、 また、短い距離内では速度を大きくすることができないため、 これは非常に困難な操作になるからです。
搭乗橋に近づくにつれて、誘導員の腕を振る速度はますます遅くなり、 パイロットはブレーキを軽く踏み続け、機体はゆっくりと移動し、いつでも停止できる状態になります。
 すると、誘導員は両手を水平に伸ばし、頭上までゆっくりと持ち上げます。最上部の図の左下に示すように、
両手が交差したときは、機体が停止位置に到達したことを意味します。
それと同時に、パイロットは同時にブレーキをしっかりと踏み、機体が停止位置を通り越さないようにしなければなりません。
すると、誘導員は両手を水平に伸ばし、頭上までゆっくりと持ち上げます。最上部の図の左下に示すように、
両手が交差したときは、機体が停止位置に到達したことを意味します。
それと同時に、パイロットは同時にブレーキをしっかりと踏み、機体が停止位置を通り越さないようにしなければなりません。機体が完全に停止した後、地上の整備員が車輪の前後に車輪止め(chock)を置き、 パイロットはエンジン停止の手順を開始することができます。
手動による誘導のほか、現在多くの空港では、自動航空機視覚駐機誘導システム(Visual Docking Guidance System)が導入されており、 パイロットは前方のディスプレイの指示に従って、機体を駐機スポットへ滑走させることができます。

視覚駐機誘導システムは、ディスプレイと機体の距離を測定するレーザースキャナーで構成されています。 システムは機種を検出・分析し、レーザーで機体の位置を追跡し、その結果を画面に表示します。 ディスプレイ上の情報には主に以下のものが含まれます: 機種 センターラインからのずれ情報 駐機位置までの距離
地上運用者が手動コントロールパネルを使用して機種情報の入力とチェックを完了すると、 システムは自己診断を開始し、スキャンを開始します。 まだ接近する機体を検出していないとき、画面の上部には機種情報が表示され、下部には絶えず上に移動する黄色い矢印が表示されます。 下の図Figure 1のように、
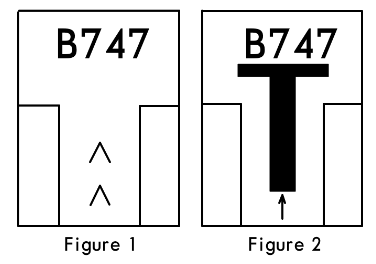 パイロットは搭乗口へ滑走する際、この信号によってシステムがアクティブになり、自分の機体を待機していることを知り、
これによって誘導操作を開始します。
パイロットは搭乗口へ滑走する際、この信号によってシステムがアクティブになり、自分の機体を待機していることを知り、
これによって誘導操作を開始します。レーザーが接近中の機体を検知すると、システムは画面中央にT字形のマークの表示を開始し、 T字の下には小さな上向きの矢印が表示されます。上の図Figure 2に示す通りです。
機体が停止位置から12メートルの距離に接近すると、システムは機種が事前に入力された機種と一致するかどうかの識別を開始します。 情報が一致すれば、システムは誘導を継続します。 しかし、システムが情報の不一致を発見した場合、画面の上部には「STOP-ID-FAIL」のエラーメッセージが交互に表示され、 同時に画面中央には2つの赤い四角形の警告情報が表示されます。
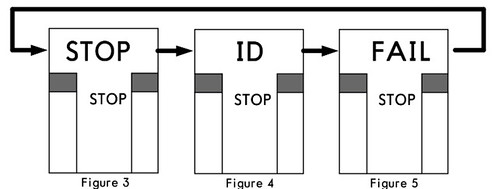 この情報を見た後、パイロットは直ちに機体の前進を停止しなければなりません。
この情報を見た後、パイロットは直ちに機体の前進を停止しなければなりません。 -
旅客機の操縦探検6.8 着陸後の手順
前回は、対地速度を10ノット以下まで減速し、現在使用中の滑走路から脱出する準備をするところまで書きました。 この時点で、塔から搭乗口までの誘導経路の指示も届いているはずです。 引き続き「Air System 115」便を例に見てみましょう。 塔 “Air System 115, Turn Right B9, Taxi Down Runway 19L, A10” 操縦士 “Right, B9, Taxi Down Runway 19L, A10, Air System 115” ここでの誘導経路は、B9出口で右折し、19L滑走路に沿ってA10出口まで滑走することを意味します。
続いて塔から再度通知があり、121.6MHzの地上管制への連絡を指示されます: 塔 “Air System 115, Contact Ground 121.6” 操縦士 “121.6, Air System 115”
操縦士は次に無線周波数を121.6MHzに調整し、地上管制に呼びかけます: 操縦士 “Chitose Ground, Air System 115, A10, Spot 16” 地上管制 “Air System 115, Ground, Taxi to Spot 16 Via H6, T2” ここで地上管制は、16番スポットへのルートを「A10からH6およびT2を経由」と伝えました。 そこで操縦士はこの経路を復唱し、 “H6, T2 to Spot 16, Air System 115” これで、当便の空との通信は基本的に終了です。
-
旅客機操縦の探秘6.7 着陸操作
機体はグライドスロープに沿って降下を続け、パイロットは自動飛行操縦システム(AFDS)の状態を引き続き監視します。 無線高度計(RA)が500フィートに達したとき、副操縦士が現在の数値を読み上げます: 「500、Vref+5、Sink700」。
ここでの「500」とは、AFE(空港標高以上、Above Field Elevation)500フィートを指します。 人口密集地帯以外での最低安全高度(Minimum Safe Altitudes)は500フィートと規定されているため、 この500フィートという高度は非常に重要な指標となります。 「Vref+5」は、現在の速度がちょうどフラップ30度时的な基準速度より5ノット速いことを指します。 Vrefの設定については、5.2 アプローチ・ブリーフィングの節で説明しました。 「Sink 700」は、現在の垂直方向の降下率が700フィート/分であることを意味します。 AFE高度1000フィート以下では、降下率を1000フィート/分以下にすることが規定されており、 現在の700という数値は問題ありません。
400フィートの高度に達すると、機体の水平尾翼のトリムが自動的に後ろへ回転し始めます。 機体の高度やピッチ姿勢は依然として変わりませんが、 自動飛行システムはすでに着陸前のフレア(引き起こし)の準備を始めています。
続いて機体は決断高度(DA)に近づき、副操縦士が「Approaching Minimum(最低高度付近)」とコールし、 機長は「Checked(確認)」と応答します。 直後に機体が決断高度に達すると、副操縦士は「Minimum(最低高度)」とコールします。 この時、視程に問題がなければ、機長は「Landing(着陸)」とコールし、 機体が着陸後の滑走手順を継続することを示します。
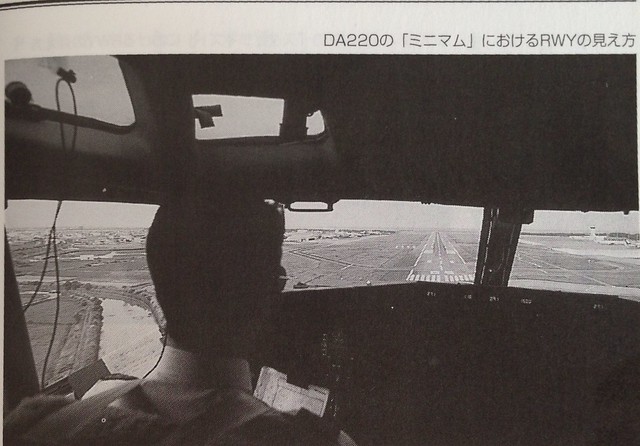 上の写真は、DA220の高度からコックピットを見た滑走路の様子です。
上の写真は、DA220の高度からコックピットを見た滑走路の様子です。もしパイロットが決断高度で滑走路を視認できない場合、機長は「Go Around(ゴーアラウンド)」とコールし、 乗員は前のセクションで紹介したゴーアラウンド手順を直ちに実行しなければなりません。
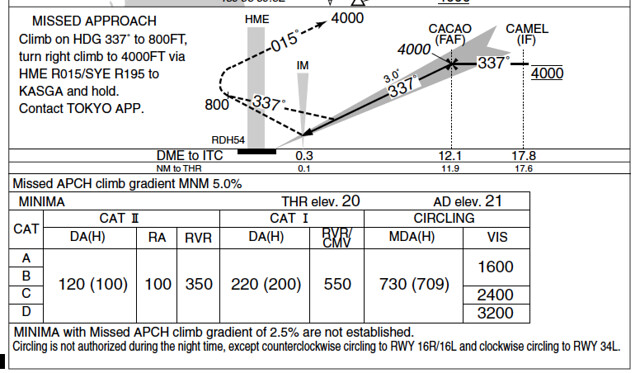 上の写真の東京国際空港(羽田)34L滑走路のILSアプローチを例にすると、
カテゴリーⅠの基準は、決断高度(DA)が220フィート以上、滑走路視距離(RVR)が550フィート以上です。
カテゴリーⅡの基準は、決断高度(DA)が120フィート以上、滑走路視距離(RVR)が350フィート以上です。
カテゴリーⅡの運航を行うには、滑走路、航空会社、機体がカテゴリーⅠよりも高い整備能力と厳格な要件を満たす必要があり、
同時にパイロットも相应的な資格を持っている必要があります。
上の写真の東京国際空港(羽田)34L滑走路のILSアプローチを例にすると、
カテゴリーⅠの基準は、決断高度(DA)が220フィート以上、滑走路視距離(RVR)が550フィート以上です。
カテゴリーⅡの基準は、決断高度(DA)が120フィート以上、滑走路視距離(RVR)が350フィート以上です。
カテゴリーⅡの運航を行うには、滑走路、航空会社、機体がカテゴリーⅠよりも高い整備能力と厳格な要件を満たす必要があり、
同時にパイロットも相应的な資格を持っている必要があります。
着陸滑走の手順に従い、一般的にはパイロットはオートパイロットを解除し、手動で機体を操縦しますが、 具体的にどの高度から、どの段階で行うべきかについて、特別な標準はないようで、 多くの場合はパイロット自身の好みや習慣に委ねられています。 私の手元の資料にはこう紹介されています(ボーイング737-500を例にすると)、 DAから50フィートを引いた高度、つまり東京国際空港の例では170フィートより前に、 パイロットはオートスロットルとオートパイロットを解除し、自ら着陸操作を行う必要があります。
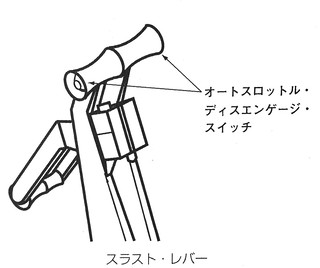 上の図:スロットルレバーとオートスロットル解除スイッチの位置
上の図:スロットルレバーとオートスロットル解除スイッチの位置
 上の図左上の矢印のボタン:オートパイロット解除スイッチ(Autopilot Disengage)
上の図左上の矢印のボタン:オートパイロット解除スイッチ(Autopilot Disengage)
無線高度(RA)が100フィートに達すると、無線高度計と連動した地上接近警報システム(GPWS, Ground Proximity Warning System)が 自動的に電子警告音を発し、現在の高度を継続して報告します: “One Hundred” “Fifty” “Forty” “Thirty” “Twenty” “Ten”
機体が滑走路端(Runway Threshold)を通過する時の高度はRA50フィートであるべきで、 それまでは3度の降下角度を維持します。 50フィートを過ぎると、フレア操作が開始され、機体の降下率は徐々に低下します。 機体のフレア(引き起こし)は、脚が地上15フィートの高さになった時点で始まり、 機体のピッチ姿勢が機首上げ3度に達します。これにより、機体が接地(Touch Down)時に 目標となる150フィート/分の降下率を実現できます。 同時に、パイロットはフレアと同時にエンジン推力を滑らかに絞り、 接地の瞬間にちょうどアイドル状態になるようにします。
-
旅客機操縦の探秘6.6 ゴーアラウンド
航空機が着陸する前に、何らかの予期せぬ事態が発生し、乗員が降下を続けて着陸することは安全上の問題があると判断した場合、パイロットは躊躇なく復飛(Go Around)手順を実行しなければなりません。
これらの状況には以下が含まれます:
- 決定高度DH(精密進入)/MAPT(非精密進入)に到達した後でも、滑走路や指示灯が見えず、必要な視覚参照を確立できない場合
- 航空機の搭載機器または地上ナビゲーション設備に故障が発生し、正常なナビゲーション精度を提供できない場合
- 着陸過程において滑走路視程(RVR)が着陸要件を満たさない場合(例:移流霧の影響など)。移流霧は、暖かく湿った空気が冷たい陸地や水面に移動し、下部が冷却されることで発生する霧です。通常冬季に発生し、持続時間は一般的に長く、範囲も広く、霧が濃く、厚さも大きくなることがあり、時には数百メートルに達することもあります。
- 側風や向かい風が強すぎる場合
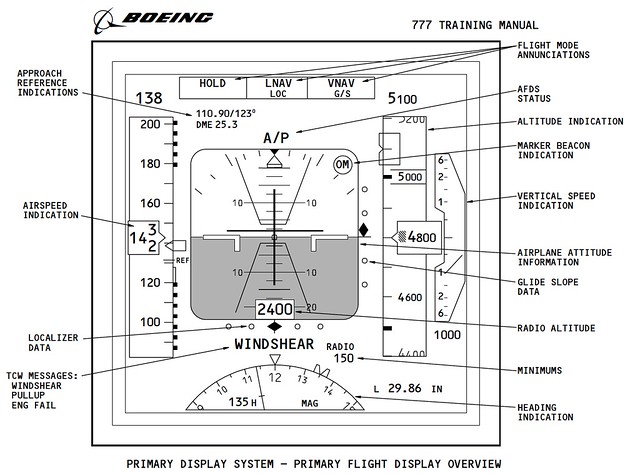
- 進入中にウィンドシア警告が表示された場合。現代の旅客機は一般的にウィンドシア検出警報システムを装備しています。もし航空機が突然強く揺れ始め、風向や風速が明らかに変化した場合、コックピット内でウィンドシア検知警報が鳴り、音声で「WIND SHEAR, GO AROUND」と通知され、主飛行ディスプレイ(PFD)にもWINDSHEARの警告文字が表示されます。
- 空中管制官から復飛の指示が出た場合
- 滑走路上に他の航空機や地上車両などがあり、衝突の危険がある場合 など。
復飛の針路については、5.4 仪表进近图の節でまとめたので、ここでは繰り返しません。
ボーイング737を例にした復飛手順の概要は以下の通りです: 機長がエンジンのTO/GAスイッチを押し、「フラップ15」と発声する。 副操縦士がフラップレバーを15の位置に設定し、フラップが正常に15まで格納されたことを確認する。 航空機の状態が降下から、機首上げの復飛姿勢へと変化し始める。 エンジンの推力が増加し、復飛に十分な推力があることを確認する。 高度計での正の上昇率を確認し、機長が「ギア・アップ」と発声する。 副操縦士がランディングギアのレバーを格納する。 副操縦士がMCP(モード・コントロール・パネル)に設定された復飛高度が正しいことを確認する。 航空機の高度が400フィートを超えた後、ロール旋回を実行し、復飛の航空路に入ることができる。 フラップ格納速度スケジュールに従って、フラップの格納を続ける。 垂直ナビゲーション(VNAV)を開始することができる。 エンジンモードを上昇推力(CLMB)に設定する。 テイクオフ後のチェックリストを実行する。
航空機が復飛(ミストアプローチ)のコースで規定された高度まで上昇した後、ホールディングパターンに入る必要があります。
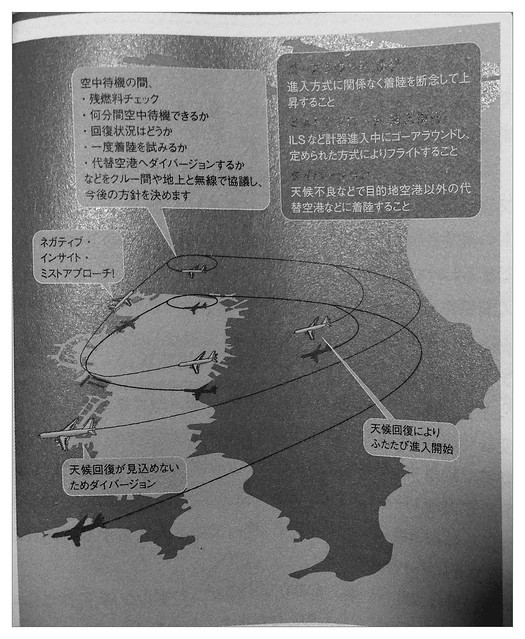 ホールディング中、パイロットは残燃料量をチェックし、可能な待機時間を見積もる必要があります。
もし天候不良による復飛であれば、天候が回復しているかを確認し、
天候条件が許すなら再着陸の判断を行うかどうかを検討します。もし天候が改善する兆候がない場合は、
代替飛行(ダイバート)手順を実行し、事前に準備された代替空港へ向かう必要があります。
再着陸であれ代替地へ向かうことであれ、事前に空中管制の許可を得る必要があり、
これには同样に時間を要するため、パイロットはホールディング中の燃料消費も考慮しなければなりません。
ホールディング中、パイロットは残燃料量をチェックし、可能な待機時間を見積もる必要があります。
もし天候不良による復飛であれば、天候が回復しているかを確認し、
天候条件が許すなら再着陸の判断を行うかどうかを検討します。もし天候が改善する兆候がない場合は、
代替飛行(ダイバート)手順を実行し、事前に準備された代替空港へ向かう必要があります。
再着陸であれ代替地へ向かうことであれ、事前に空中管制の許可を得る必要があり、
これには同样に時間を要するため、パイロットはホールディング中の燃料消費も考慮しなければなりません。ここまで書いて、自分が飛行機に乗っていた際の、復飛と代替飛行を含あるある経験を思い出しました。 そして最後は目的地に戻りましたが、これもまた貴重な体験となりました。
ある年、アメリカ出張の帰り、アメリカ航空のボーイング777に乗ってカリフォルニア州のサンノゼから東京に戻る際のことです。 成田空港に接近後、風が強く、機体が絶えず揺れていました。 その後、航空機がゆっくりと降下を続けていた時、突然エンジン音が大きくなり、 航空機は再び上昇し始め、これによって風が強すぎるため、パイロットが着陸を中止して復飛したことを知りました。 航空機は上空でしばらく旋回した後、機内放送で「成田空港の天候状況では着陸が許可されないため、名古屋へのダイバートの可能性がある」と伝えられました。 しかし、さらにしばらく待機した後、再び「羽田空港へダイバートする」との放送があり、おそらく機内の燃料では名古屋まで飛行できなかったのだと思われます。 成田から羽田は非常に近く、10分ほどで着陸したように感じられました。 羽田に着陸後も機外に出ることはできず、エプロンのどこかで給油し、成田空港の天候が回復するのを待ちました。 羽田空港で1時間以上ほど待った後、ついに「成田空港へ戻ることができる」という連絡があり、再び離陸の列に並び、 最終的に定刻より3時間半遅れて成田空港への着陸に成功しました。 当日に家に帰れ、名古屋で宿泊しなくて済んだことだけは幸運でした。
とにかく、復飛は飛行安全を確保する措置の一つであり、進入着陸過程において不可分な部分であり、 進入のミスを防ぐ方法の一つであり、緊急事態を処理するための重要な措置でもあります。 復飛は恐れることではなく、手順通りに復飛を行えば一切の危険はありません。 民間航空機にはあらかじめ復飛手順が設定されており、これは非常に基本的な飛行操作手順です。 同時に、パイロットは進入着陸の過程、特にDH(MDH)に接近する際には、いつでも復飛に移行できる決断意識を持っていなければなりません。 悪天候(積乱雲や濃積雲、断続的な大雨や暴雨、強烈な突風など)の下では、決して侥幸の心理を持ってはならず、 着陸条件に適合しない場合は、即座に復飛の決断を下す必要があります。
以下の動画は、大雨の中で復飛する航空機の実況を捉えたもので、非常に参考になります。
完
-
旅客機操縦探秘6.5 着陸手順
パイロットが実行する着陸手順は、実のところ第6.3節で紹介したILSの設定から始まっています。 本節では、その他の操作をまとめます。
まず、パイロットは客室乗務員に着陸の準備をするよう通知し、乗客にテーブルを格納し、シートベルトを着用し、座席の背もたれを起こし、着陸前のすべての安全準備を整えるよう求めます。 次に、機長はフラップ設定計画表に基づいてフラップ設定を指示し、副操縦士はその指示に従ってフラップ・レバーを操作し、フラップとスラットが正しく伸出したかどうかを監視します。
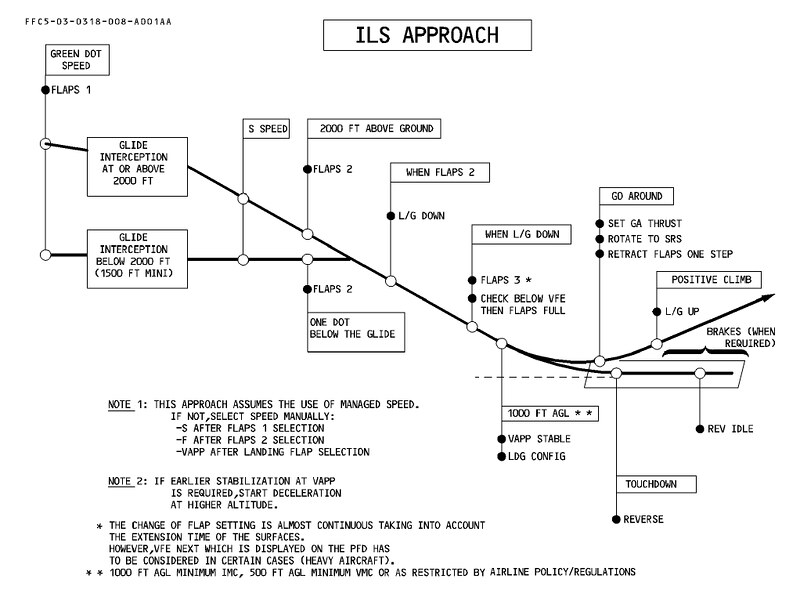
フラップの伸出計画については、下のエアバスA340のフライト・マニュアルにある資料を参照してください。 グライドスロープ・キャプチャ前には設定1に、グライドスロープ・キャプチャ後の高度2000フィートへの降下時に設定2に、 その後は着陸装置(ランディングギア)を下ろし、フラップは設定3に、そして速度がVref基準速度を下回ったら設定FULLにされます。
以下の2枚の写真から、グライドスロープ・キャプチャ前後のフラップの位置を見ることができます。 これは、私がエアバスA320に乗って東京国際空港(羽田)へ向かう際に撮影したものです。 当時のアプローチ滑走路はILS Zulu 34Lで、グライドスロープ・キャプチャ前のフラップ位置は15度、このとき航空機は千葉県の上空にいました。

滑走路の方向を合わせてグライドスロープ・キャプチャ後、フラップ位置は20度まで下ろされます。このとき、航空機は東京湾の上空を飛行しています。

第2.6節で紹介したフラップの設定ノッチは、エアバス社とボーイング社で定義が異なります。例えばエアバスA330には5つのノッチ(0、1、2、3、FULL)がありますが、ボーイング777には6つのノッチ(1度、5度、15度、20度、25度、30度)があります。
ここからは、ボーイング737-500を例に、着陸手順をまとめます。 グライドスロープ・キャプチャ前に、フラップをノッチ5まで下ろし、次に着陸装置のレバーを下ろします。緑色の着陸装置表示灯が点灯したら、 フラップ・レバーを15に置き、同時にエンジン始動スイッチ(Start Switches)を連続CONT位置に設定します。 次に、システム・アニュンシエーター(System annunciator)のリコール(Recall)と再確認を行い、 スポイラー・レバー(Speedbrake Lever)をアーム(ARM)位置に設定し、スポイラー・予備表示灯SPEED BRAKE ARMEDが点灯していることを確認します。 グライドスロープ・キャプチャ後は、引き続きフラップ計画表に従って必要なノッチを設定し、MCPに復飛高度を設定します。 続いて機長が着陸前チェックリストの指示を開始し、副操縦士は以下の着陸前チェックリストを実行します:

以下では、着陸手順で必要な各コントローラーと計器の操作について具体的に見ていきましょう。
フラップ・レバー(Flap Lever)

737のフラップ・レバー(Flap Lever)のノッチ側面図。
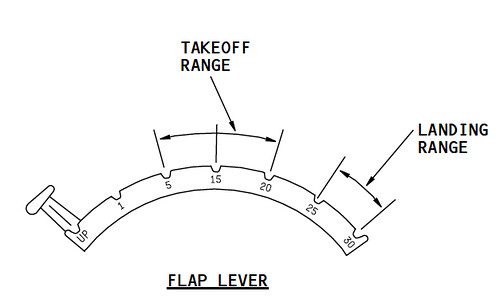 それぞれのノッチには溝があることがわかります。フラップを設定する際、パイロットは指でレバーの頭部をつかみ、
引き上げてから、設定したいノッチへレバーを移動させ、手を放すとレバーがそのノッチにカチッと収まります。
それぞれのノッチには溝があることがわかります。フラップを設定する際、パイロットは指でレバーの頭部をつかみ、
引き上げてから、設定したいノッチへレバーを移動させ、手を放すとレバーがそのノッチにカチッと収まります。システム・アニュンシエーター(System annunciator)は、下図の黒枠内の部分で、ボタンとしても機能し表示灯でもあります。
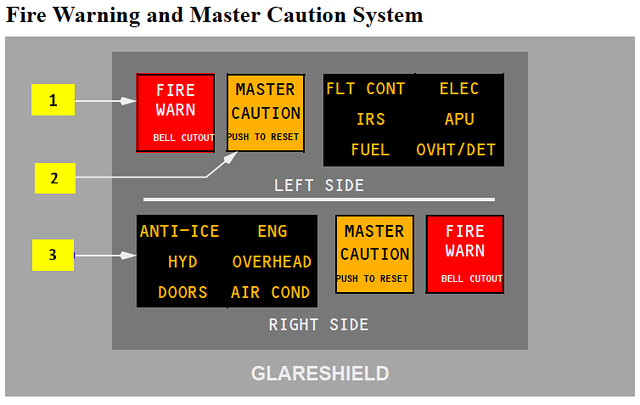 機上のサブシステムに故障が発生すると、アニュンシエーターの関連するシステムの小さなランプが点灯し、パイロットに警報を提供します。
リコール操作を行う際、スイッチを押すと、アニュンシエーターのすべての小さなランプと、横にあるマスター・コーションMASTER CAUTIONランプがすべて点灯し、
マスター・警報システムと各個別故障システムが正常に動作していることを示します。
機上のサブシステムに故障が発生すると、アニュンシエーターの関連するシステムの小さなランプが点灯し、パイロットに警報を提供します。
リコール操作を行う際、スイッチを押すと、アニュンシエーターのすべての小さなランプと、横にあるマスター・コーションMASTER CAUTIONランプがすべて点灯し、
マスター・警報システムと各個別故障システムが正常に動作していることを示します。スポイラー・レバー(Speedbrake Lever)は、スロットル・レバーの左側にあり、左側に突き出ているレバーです。
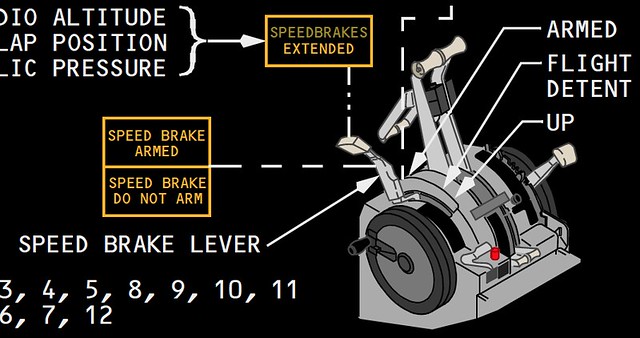
スポイラー・レバーを下げた(Down)位置からアーム(ARM)位置に設定すると、横のSPEED BRAKE ARMEDランプが点灯します(下图参照)。
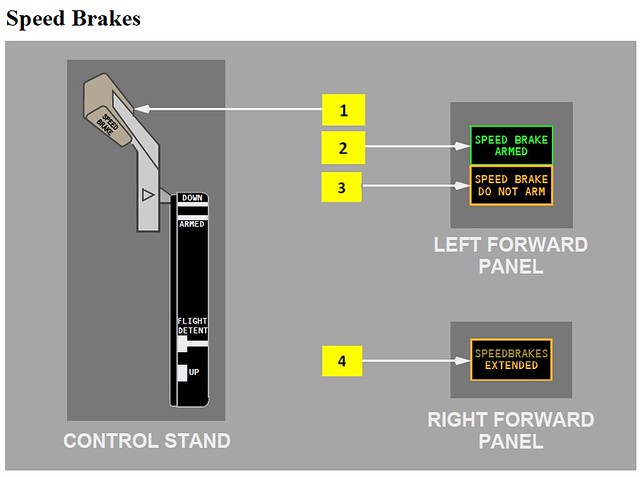 ARMED位置は、自動スポイラー・システムが作動していることを意味します。こうすることで、航空機が滑走路に着陸すると(touch down)、
スポイラー・レバーは自動的に「UP」位置に移動し、それによって内側と外側のスポイラーが自動的に最大位置まで開きます(下图参照)。
ARMED位置は、自動スポイラー・システムが作動していることを意味します。こうすることで、航空機が滑走路に着陸すると(touch down)、
スポイラー・レバーは自動的に「UP」位置に移動し、それによって内側と外側のスポイラーが自動的に最大位置まで開きます(下图参照)。

着陸装置のレバーは、EICASと副操縦士側のPFDの間にあり、レバーの頭部はタイヤの形をしており、非常に識別しやすくなっています。
 着陸装置のレバーをUP状態からDNまで引き下げると、レバー上の緑色の着陸装置表示灯が点灯します。
着陸装置のレバーをUP状態からDNまで引き下げると、レバー上の緑色の着陸装置表示灯が点灯します。
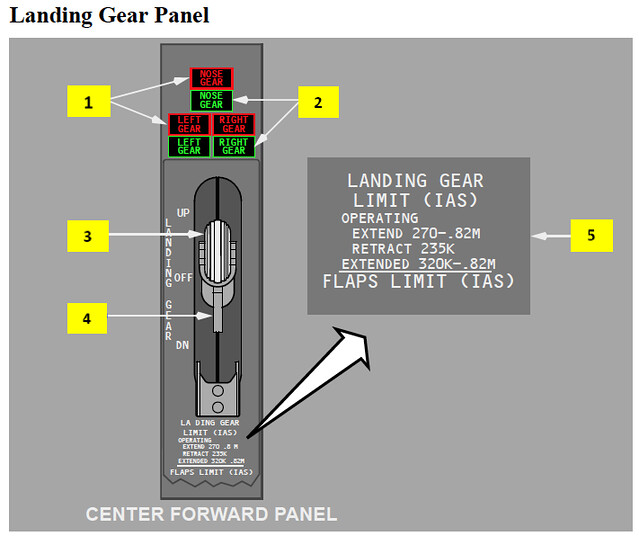 上の図からわかるように、前方の着陸装置と後方の2つの主着陸装置のランプは分かれており、
いずれかで故障が発生した場合、表示灯を見ればどちらかを知ることができます。
上の図からわかるように、前方の着陸装置と後方の2つの主着陸装置のランプは分かれており、
いずれかで故障が発生した場合、表示灯を見ればどちらかを知ることができます。着陸前チェックリストが完了し、同時に航空機もILSのグライドスロープを追跡して高度を下げ続けています。 垂直方向の降下率は約700フィート/分に維持されており、対気速度も継続的に低下させる必要があります。 パイロットはMCPで目標速度を設定し続け、それに伴ってフラップを徐々に下ろしていきます。例えば、今回の着陸でフラップ30を使用する場合、 最終的には速度をVref30+5(例えば133ノット)に設定します。 PFDのILS表示で航空機が確実にグライドスロープを捕捉(ロック)したことが確認できたら、パイロットは復飛高度(例えば4500フィート)をMCPの高度目標に設定します。 復飛(go around)とは、航空機が降下して着陸する過程で、何らかの特別な状況に遭遇した際、即座に降下着陸を中止し、再び通常の上昇状態に移行するプロセスのことです。
-
旅客機操縦探検6.4 リ pattens
トラフィックパターン(Traffic Pattern、五辺飛行とも呼ばれます)について
トラフィックパターンは、空港での離着陸を行う航空機のために定められた交通の流れを定義するものです。 この経路は、滑走路に対して長方形を描くように飛行し、特定の高度を維持します。 これにより、パイロットは空港付近を飛行する他のパイロットの位置を予測し、把握することができます。 トラフィックパターンはまた、パイロット訓練においても重要な課題であり、五辺飛行を通じてパイロットは離陸、上昇、旋回、水平飛行、降下、着陸といった重要な飛行技術を学びます。
トラフィックパターンには5つの主要な辺があります:
- 一辺(出発辺、Departure、または Upwind)
- 二辺(クロスウィンドレグ、Cross-wind leg)
- 三辺(ダウンウィンドレグ、Downwind leg)
- 四辺(ベースレグ、Base leg)
- 五辺(ファイナルアプローチ、Final Approach)
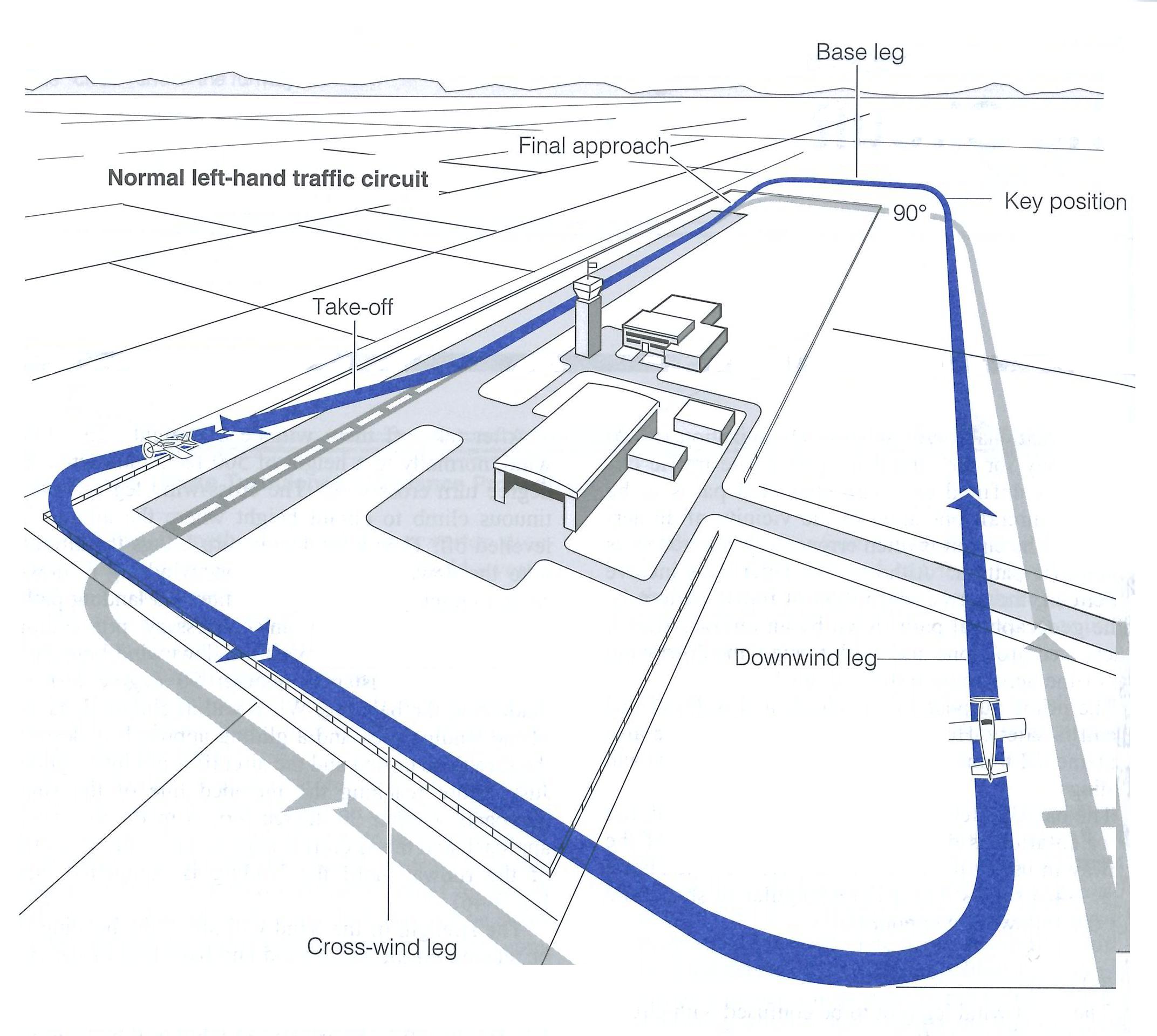
経路における旋回方向により、トラフィックパターンは左回り(左トラフィックパターン)
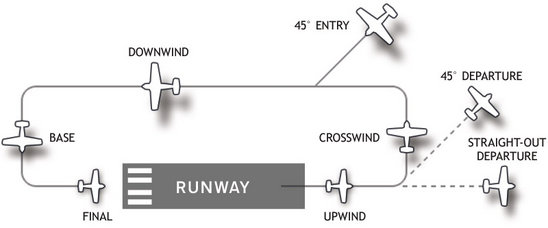
と右回り(右トラフィックパターン)に分けられます。
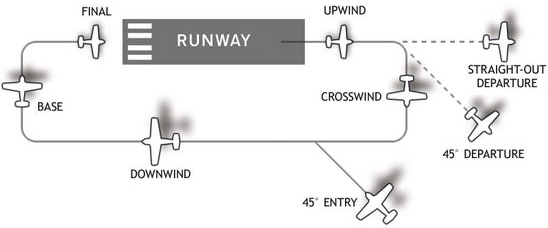
空港のトラフィックパターンは通常、左回りです。 ただし、地形や都市などの条件により制限される場合、あるいは近隣の空港とのトラフィックパターンの交差を避けるために、右回りとなることもあります。 トラフィックパターンの飛行高度は、通常300メートルから500メートルです。
上の図からわかるように、航空機が離陸し出発する際、通常は一辺でストレートアウト・デパーチャー(straight out departure)を行うか、 または45度転回(45° departure)で一辺を離れる方法をとります。 着陸時、航空機は通常、三辺から45度の角度でトラフィックパターンに入ります(上図の45° entry)。 もちろん、航空機が空港を離れて航空路やコースに加わる場合、あるいは航空路やコースを離れて空港に向かう場合は、 その空港の使用細則または進入・出発プログラムで規定された経路と高度に従って上昇または降下しなければなりません。 トラフィックパターンへの参加は、空中交通管制員の許可を得る必要があり、かつ経路に沿って加入しなければならず、横方向から割り込んではなりません。
ILSを使用する航空機の着陸では、一般的には滑走路の方向に沿って、 ローカライザーを捕捉して直線状のまま五辺に入ればよく、これを straight-in ILS approach と呼びます。
しかし、空港の滑走路にILSアンテナが片側にしか装備されていない場合、逆方向への着陸はどうすればよいのでしょうか? その際、Circling Approach の方法を採用できます。 目視盤旋進近(Circling Approach)は、最終進近の計器飛行直後に、 着陸前に空港の周囲で行われる目視での機動飛行です(トラフィックパターンと一致した経路で着陸します)。 独立した進入方式として、これは多くの空港の進入プログラムに存在します。

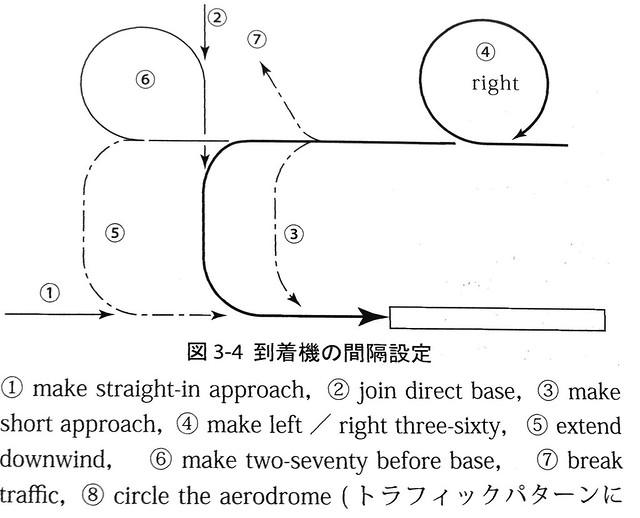
トラフィックパターン上の着陸機については、交通量の混雑状況に応じて、 空中交通管制員がパイロットに対して様々な間隔に関する指示を出すことがあります。 パイロットは命令を受けた後、通常の航路を変更し、具体的な指示に従って飛行ルートを変更する必要があります。 これらの指示には以下の種類があります: 1 straight-in approach:直接進入 2 join direct base:四辺に直接入ってトラフィックパターンに参加 3 make short approach:短い進入。三辺の飛行距離を極力減らす、つまり可能な限り早く着陸するよう指示 4 make left/right three sixty:三辺で左または右に1周(360度)旋回する。四辺・五辺に離着陸中の航空機がいるため、三辺で少し待機させるため 5 extend downwind:三辺を延長する。これも航空機を待機させる一つの方法 6 make two-seventy before base:四辺に入る前に3/4周(270度)回ってから通常通り四辺に入る。別の待機方法 7 break traffic:トラフィックパターンからの離脱。着陸の条件が整っていないため 8 circle the aerodrome:トラフィックパターン上で空港をもう1周回る。より長時間の待機方法
-
ジェット機のコックピットを探る6.3 最終進入固定点とILSの設定
6.1節では、航空機が中間進入 fixing point IF (Intermediate Fix) を通過し、水平飛行の状態に入ることを説明しました。 この節では、IF から最終進入 fixing point Final Approach Fix (FAF) へ飛行する過程での操作について解説します。 IF と FAF の関係については <a href="/blog/ja/2013/03/ja-airline_pilot_54"5.4節 で紹介しましたが、ここでもう一度復習しておきましょう。
CDU の NAV/RAD ナビゲーション設定ページで、入力したデータに誤りがないか確認します。 例えば、着陸する滑走路の方位角が128度、無線周波数が110.90MHzであることを確認します。 下図はボーイング777の CUD 表示の概略図です。

フラップ展開の計画に基づいて「Flap 5」のようにフラップ・レバーを設定し、フラップとスラットの展開状況を監視します。
この時点で ATC の管制は塔へ移管されているはずです。 引き続き、東京羽田空港から北海道札幌新千歳空港へ向かう AirSystem115 便を例に説明します。
「アプローチ管制: Air System 115、Hayakita の南方 4 マイル、塔周波数 118.8 へ交信 パイロット: 118.8 へ変更、Air System 115」
パイロットは通信周波数を 118.8MHz に合わせ、塔を呼び出します。 「パイロット: Chitose 塔、Air System 115、Hayakita まで 2 マイル、Spot 16 塔: Air System、塔、了解、Hayakita 通過報告、滑走路 19L、風 220 度 12 ノット パイロット: Hayakita 通過報告 了解、19L、Air System 115」 塔は、パイロットに対し Hayakita 報告点を通過した後、再度連絡するよう求めています。
-
旅客機の操縦探極 6.2 着陸支援システム
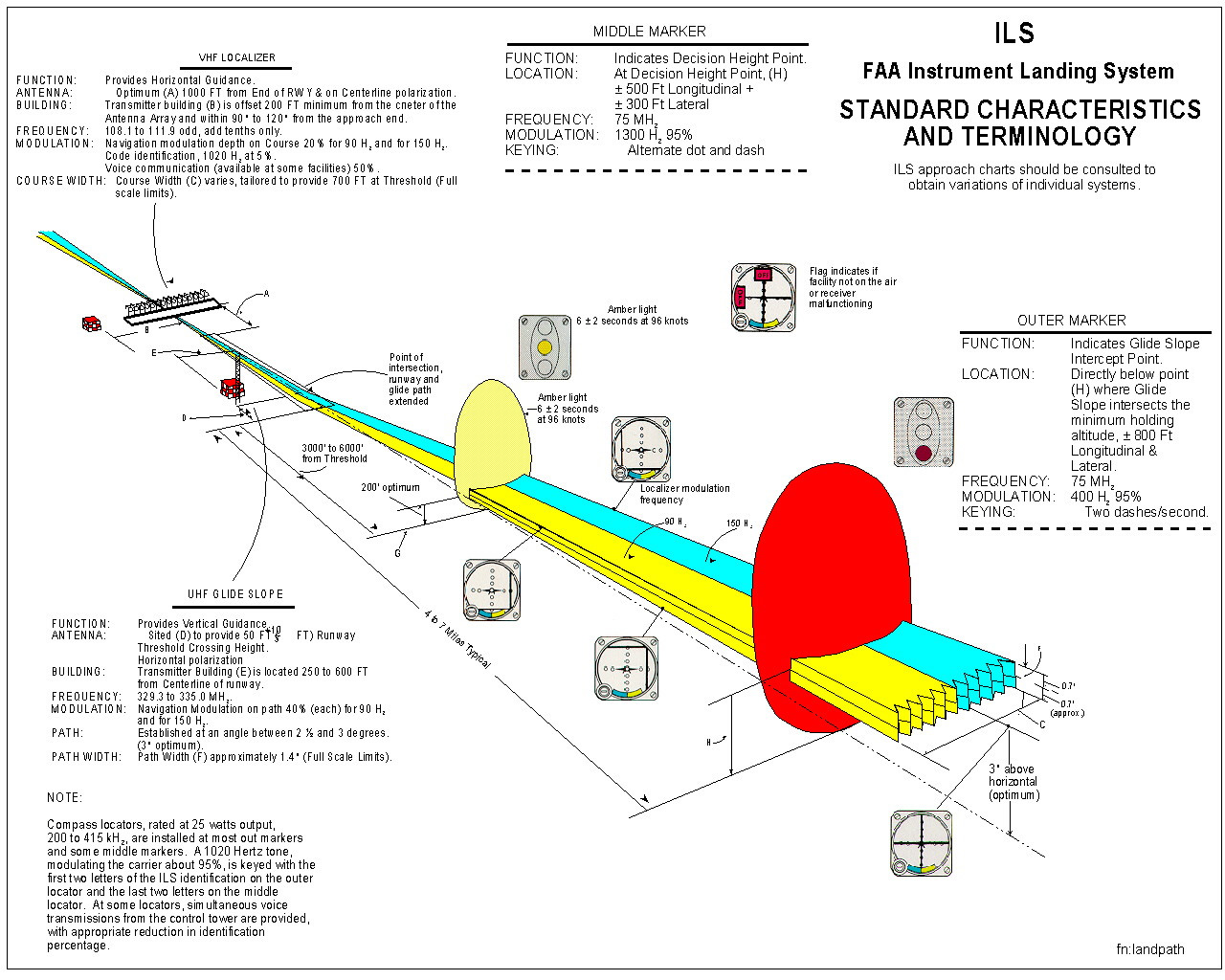
着陸支援システムには、いわゆる「ブラインドランディングシステム」である計器着陸システム ILS(Instrument Landing System)や、精密進入航路指示器 PAPI(Precision Approach Path Indicator)が含まれます。 また、滑走路の視程 RVR を測定するための透過計は、空港の滑走路付近でよく見かけることができます。 個人的な体験としては、観光や帰省、出張で飛行機に乗る際、空港内の様々な設備を認識できることで、旅の楽しみも大幅に増すことでしょう。
計器着陸システム ILS は、現在最も広く普及している航空機の精密進入および着陸誘導システムです。 その役割は、地上から発射される無線信号によって、水平方向のローカライザ(Localizer)と垂直方向のグライドスロープ(Glide Slope)による誘導を行い、滑走路から空へ向かう仮想の経路を確立することです。 航空機は機上の受信機を通じて、この経路に対する相対位置を把握し、正しい方向で滑走路へ向かって高度を低下させ、最終的に安全な着陸を行います。 計器着陸システムは、低い気象基準やパイロットが視覚的な目標物を全く確認できない状況下でも、航空機を進入着陸させることができるため、通常は「盲降(ブラインドランディング)」と呼ばれています。
ローカライザとグライドスロープの設備が空港内のどこに配置されているかは、以下の ILS システムの概念図で確認できます。

ここから、ローカライザとグライドスロープについて詳しく見ていきましょう。
上の図からわかるように、ローカライザの地上アンテナから発せられる2つの等強度の無線ビームが、黄と青の仮想経路を形成しています。 (左上のローカライザが発射する VHF 信号には、それぞれ 90Hz と 150Hz の振幅変調周波数が使用されているため、滑走路に面する領域を左右の2つに分けることができます。) 進入方向に向かって滑走路を正面に見た場合、左側の黄色いゾーンが 90Hz 信号、右側の青いゾーンが 150Hz 信号となります。 したがって、航空機の受信設備はこれら2つの信号の強度差に基づいて現在位置を判断し、パイロットに対して滑走路の中央線に正対しているかどうかの情報を提供します。 もし中心から逸れていれば、そのずれ量を表示し、パイロットが修正できるようにします。
ローカライザ(Localizer, LOC/LLZ)から発せられる水平方向の指示信号(LOC 信号)の周波数は 108.8 ~ 111.95MHz の間で、ビームは角度の非常に狭い扇状であり、航空機の滑走路に対する進入路(水平位置)の指示を提供します。 ローカライザのアンテナ群は、滑走路の進入方向とは反対側、通常は滑走路の反対側の端から約 300 メートルの位置に設置されています。 以下は、広島空港で私が撮影した写真です。
 このローカライザが一組の赤いアンテナで構成されていることがわかります。位置は 28 番滑走路の末端にあるため、10 番滑走路方向へ着陸する航空機に対して水平指示を提供するものです。
このローカライザが一組の赤いアンテナで構成されていることがわかります。位置は 28 番滑走路の末端にあるため、10 番滑走路方向へ着陸する航空機に対して水平指示を提供するものです。次に、関西国際空港の 06R 滑走路用のローカライザ(LOC)アンテナの写真をご覧ください。
 当日、着陸に使用されたのは同一滑走路の反対方向である 24L で、JAL のボーイング 737 が LOC の真上を通過しているところです。
当日、着陸に使用されたのは同一滑走路の反対方向である 24L で、JAL のボーイング 737 が LOC の真上を通過しているところです。グライドスロープ(Glide Slope, GS または Glide Path, GP)は、約 3 度の仰角を持つビームを利用して、滑走路の入り口に対する航空機の下滑路(垂直位置)の指示を提供します。 グライドスロープは、滑走路の側方 500 フィート、進入端から 1000 フィートの位置にあり、使用周波数は 329 ~ 329MHz で、ローカライザのビームと似ています。 グライドスロープのビーム信号も等強度の 2 つのビームで構成され、地平面に対して 3º の下滑路の上下に分布しています。 下滑路の上側では 90Hz の振幅変調、下側では 150Hz の振幅変調が行われています。 航空機の降下角度が下滑路よりも高い場合、90Hz の電波が強くなり、計器の針は下向きになります。パイロットは機首を下げます。 逆に、150Hz の電波が強い場合、航空機は高度を上げる必要があります。 2 つの電波の強度が均衡しているとき、航空機は正常な 3º の勾配で降下を維持し、滑走路へ平稳に着陸します。
-
旅客機操縦の探秘6.1 レーダー誘導進着時の操縦
5.6節では、レーダー誘導を行う際の航空管制官との会話についてまとめましたが、以下では到着(アプローチ)進入中のパイロットの具体的な操作についてまとめます。
管制が「Air System 115, Turn Left Heading 040」のように針路の指示を発した場合、 つまり航空機に対して左旋回して方位角40度の針路をとるよう要求していることになります。 パイロットは、モード制御パネルMCP(Mode Control Panel)のHEADING(針路)ノブを調整し(下記のボーイング737のMCP図を参照)、
 ディスプレイ内の数値を040に合わせます。そしてノブの下にあるHDG SELスイッチを押すと、
この時、FMA(フライトモードアナウンス)のモードが変化し、それまでの水平航行LNAVから針路選択HDG SELモードに切り替わります。
ディスプレイ内の数値を040に合わせます。そしてノブの下にあるHDG SELスイッチを押すと、
この時、FMA(フライトモードアナウンス)のモードが変化し、それまでの水平航行LNAVから針路選択HDG SELモードに切り替わります。この変化は、下図のFMA(Flight mode annunciation)飛行方式信号器の状態遷移図で確認できます。
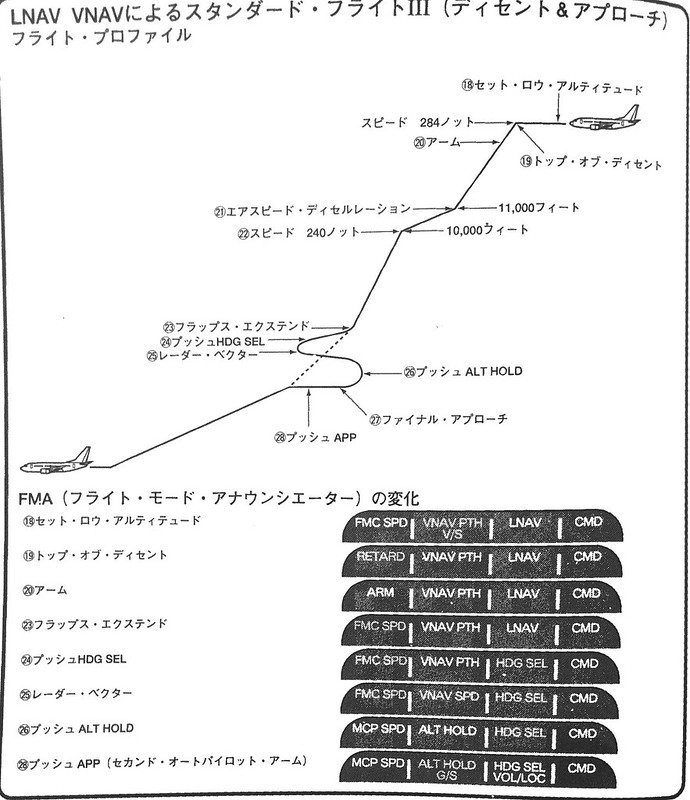 23の飛行状態において、HDG SELを押すと、水平方向の制御は24の針路選択状態に切り替わります。
したがって、針路の制御はフライト管理コンピュータではなく、パイロット自らの手動管理に移行します。
23の飛行状態において、HDG SELを押すと、水平方向の制御は24の針路選択状態に切り替わります。
したがって、針路の制御はフライト管理コンピュータではなく、パイロット自らの手動管理に移行します。
しかし、MCPは航空機の飛行方向を管理しているに過ぎず、具体的な旋回動作はコンピュータによる自動的な舵面の調整に依存していることを理解する必要があります。 一般的に、標準的な旋回では航空機は30度のロールを行います(単に垂直尾翼のラダーを動かすだけではありません)。 左右のエルロン(補助翼)によって生じる揚力の差を利用して機体を左右に傾け、旋回を行います。 例えば左旋回をしたい場合、左側のエルロンは上がり、右側のエルロンは下がります。そのため、右側の主翼が発生する揖力は大きくなり、 左側の揚力は小さくなります。両側の揖力のアンバランスにより、航空機の機体は左に傾き、左への旋回を開始します。

機首の方向が目標の針路に徐々に近づくと、コンピュータは再びエルロンを調整して傾斜角度を徐々に減少させ、 針路040度(北東方向)に到達した時、ちょうど航空機が水平飛行の状態になるようにします。
レーダー誘導が開始されたため、パイロットは垂直高度航行VNAVモードを切り、 手動高度制御モードを開始します。例えば、現在航空機が4000フィートの高度で水平飛行状態にある場合、 パイロットはALTITUDE(高度)ノブの下にあるALT HLDスイッチを押し、航空機を現在の高度に維持します。 それに伴いFMA飛行方式信号も切り替わり、自動スロットルモードはFMC SPDからMCP SPDへ、 同時にピッチモードはVNAV ALTからALT HOLDモードへと移行します。 この変化は、上記のFMA状態遷移図の第25および26項にそれぞれ示されています。 これにより、航空機の高度制御もFMCから切り離され、パイロットがMCP上で直接制御するようになります。
自動スロットルモードがFMC SPDからMCP SPDに入ると、 それまで表示されていなかったMCP上の速度指示器IAS/MACHが点灯し、 現在の航空機の対気速度が表示されます。 何も調整しなければ、コンピュータは自動的にスロットルを調整し、この速度を維持して飛行を続けます。 パイロットは、標準計器到着経路(STAR)および計器進入方式の要求に基づいて速度を調整し、 必要に応じて適切にフラップを下ろし、かつ対気速度が機体強度の制限を超えないよう、フラップ機動速度を管理します。
マニュアルの規定によると、フラップ機動速度は5.7節で言及したVREF基準速度を基準とし、 重量の変化に伴い、以下のフラップ計画に従って航空機の速度が失速速度以下にならないよう保証されています。
ボーイング737を例にとると、VREFを採用した場合のフラップ位置40におけるフラップ機動速度は以下の通りです: フラップ位置1 の時のフラップ機動速度 VREF+50ノット フラップ位置5 の時のフラップ機動速度 VREF+30ノット フラップ位置10 の時のフラップ機動速度 VREF+30ノット フラップ位置15 の時のフラップ機動速度 VREF+20ノット フラップ位置25 の時のフラップ機動速度 VREF+10ノット フラップ位置30 の時のフラップ機動速度 VREF30 フラップ位置40 の時のフラップ機動速度 VREF40
-
旅客機操縦探秘5.7 降下中の操作まとめ
本節では、パイロットの降下操作について簡単にまとめます。機種は引き続きボーイング737を例とします。
まず注意が必要なのは降下プログラムです。降下開始点(TOD)の80海里手前から開始し、10,000フィート平均海面高度(MSL)で完了する必要があります。
降下の準備として、ATISまたはACARSを使用して目的地空港の最新の気象実況、アプローチ手順、滑走路の状況を取得し、気象レーダーで降下域の天候を観測し、アプローチ方式、空港資料図、アプローチ図などの準備を行います。
次に副操縦士がCDUへの着陸航路の設定、目的地空港の着陸高度の設定を行います。
その後、機長と副操縦士で操縦と通信の交代を行い、副操縦士が操縦を担当します。機長は航空機の残燃料とバランス燃料の確認を慎重に行い、必要に応じて防冰スイッチを入れ、CDU上の到着およびアプローチ手順の設定を確認し、各ウェイポイントの高度および速度制限を確認します。アプローチ基準ページで着陸重量/VREF/QNHまたはQFEの設定を確認し、降下予報ページに遷移高度層/予報風情報を入力し、ナビゲーション周波数(VOR/ILS/DMEなど)を設定し、オートブレーキを選択します(通常は1または2、滑走路の長さが短い場合や积水している場合は3またはMAXを選択)、そしてアプローチ・ブリーフィングを完了します。
その後、機長と副操縦士は再度、操縦と通信の交代を行い、降下チェックリストの実行を開始します。
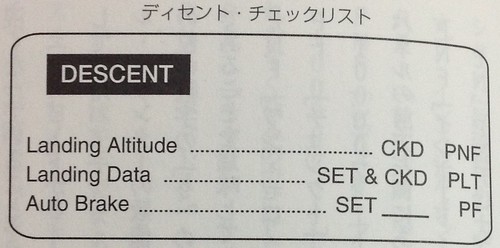 降下チェックリストの内容には、着陸高度の確認、着陸データの設定と確認、およびオートブレーキの設定が含まれていることがわかります。
降下チェックリストの内容には、着陸高度の確認、着陸データの設定と確認、およびオートブレーキの設定が含まれていることがわかります。CDUで計算された降下開始点(TOD)に到達する前に、機長は副操縦士に管制への降許可の要求を指示します。許可を得た後、MCPで到着手順の初期点の降下高度を設定し、VNAVモードにより航空機を制御し、FMCが自動計算したTOD点まで飛行して自動降下を開始します。
高度が下がり遷移高度層に近づいたら、気圧高度計を標準大気QNEから修正海面気圧QNHに修正する必要があります。
 <a href=<a href="/blog/ja/2012/10/ja-airline_pilot_43.html<a href=>" 4.3 飛行高度と気圧および最大飛行高度でこの設定について詳しく解説したため、ここでは繰り返しません。
<a href=<a href="/blog/ja/2012/10/ja-airline_pilot_43.html<a href=>" 4.3 飛行高度と気圧および最大飛行高度でこの設定について詳しく解説したため、ここでは繰り返しません。航空機の垂直方向の平均降下率は通常400メートル/分、約24キロメートル/時であるため、巡航高度の10,000メートルから地上に降下するまでには約25分かかります。
航空機の主翼上部には、スポイラー(Spoiler、時にはリフトダンパーとも呼ばれる)と呼ばれる装置が装備されており、内側スポイラー(Inboard Spoiler)と外側スポイラー(Outboard Spoiler)の2つの部分に分かれています。空中で降下する際に外側スポイラーを上に開くと、揚力が減少し空気抵抗が増加し、減速の目的を達成できます。
 上の写真は、私がANAのボーイング777-200に搭乗し北京首都国際空港へ向かう降下中に撮影したもので、主翼中央にあるスポイラーが一部だけ開いているのがわかりますが、これだけでも航空機に必要な抗力を得るには十分です。
上の写真は、私がANAのボーイング777-200に搭乗し北京首都国際空港へ向かう降下中に撮影したもので、主翼中央にあるスポイラーが一部だけ開いているのがわかりますが、これだけでも航空機に必要な抗力を得るには十分です。別の角度、航空機の後ろ側から見ると、スポイラーが開いた時はこのようになります。
 写真は千葉県上空で撮影されたもので、成田空港へのアプローチ中、機種は777-200ERです。
写真は千葉県上空で撮影されたもので、成田空港へのアプローチ中、機種は777-200ERです。また、滑走路に着陸した後に撮影した以下の写真を参照してください。内側と外側のスポイラーがすべて開き、完全に直立しているのがわかります。このように着陸後、航空機に大きな抗力を与え、主翼が発生する揚力を急激に低下させ、機体とタイヤが完全に接地する目的を達成します。そうすると車輪のブレーキも作動し始め、より大きな減速効果を提供します。
しかし実際にはパイロットにとって、スポイラーを使用する主な目的は減速ではなく、垂直方向の降下率を増やすことにあります。 例えば、降下ルートの前方に積乱雲がある場合、回避機動を行う必要があり、積乱雲を回避してから降下を開始しますが、この時の降下開始点(TOD)はすでに予定地点を過ぎています。予定高度にできるだけ早く到達するため、ここでスポイラーを利用して降下率を大きくし、回避機動によって失われた時間を取り戻すことができます。しかし、スポイラーを使用すると機体の振動や騒音が発生し、乗客にとっては不快に感じる可能性があるため、パイロットは可能な限りスポイラーを使用しない降下計画を検討します。
通常、遷移高度層でアプローチ手順を開始し、初期アプローチ固定点(IAF)またはレーダー誘導の開始前にアプローチ手順を完了します。
アプローチ手順には、客室サインの設定(シートベルトの点灯。10,000フィート以下では地表温度が高く、それによって生じる大気対流現象により乱気流が発生しやすいため)が含まれます。10,000フィートに到達した後、着陸灯およびストロボライトのスイッチを入れます(識別能力を高め、他の航空機または鳥類との空中衝突の確率を減らすため);高度の遷移層で高度計を設定し相互チェックを行います;必要な通信とナビゲーション周波数(VOR/ILS/DMEなど)を設定します。完了後、アプローチチェックリストを実行します。
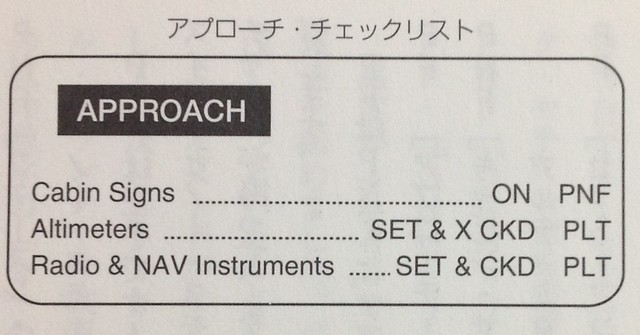 内容は上記の通りで、アプローチ手順で説明した各項目となります。
また、パイロットはシートの調整、ショルダーベルトの装着、客室乗務員への降下準備の連絡を行う必要があります。
内容は上記の通りで、アプローチ手順で説明した各項目となります。
また、パイロットはシートの調整、ショルダーベルトの装着、客室乗務員への降下準備の連絡を行う必要があります。航空機の高度は低下し続け、初期アプローチ固定点(IAF)に徐々に接近します(前の節の紹介を例にすると、高度4,000フィート)、垂直方向の降下率も徐々に低下し、航空機の姿勢は水平飛行状態に近づき始めます。
降下しなくなったため、エンジンはアイドリングのままにできず、スロットルを増やし、航空機が十分な揚力を保持する必要があります。もちろん、これはコンピュータのオートスロットルによって自動的に制御されます。そのため、客室内の乗客も、降下段階より外のエンジン音が大きくなったと感じることができ、経験豊富な乗客はすぐに着陸することを知るでしょう。
最後に、航空機の防氷システムに関する知識を少し補足します。
航空機が高い航路を飛行する際、航空機の表面温度は0℃以下になります。航空機の降下中に湿った空気に遭遇した場合、この時の環境温度が氷点以上であっても、透明の氷や霜が形成され、航空機の正常な飛行に影響を与える可能性があります。
過冷水滴(supercooled water droplet)は、負の温度で凍結していない液状の水滴です。地上条件では零度を下回ると水が凍ることは誰もが知っていますが、高空にはこの特殊な水が存在し、水の中に凝結核が不足しているため、零下10度甚至数10度でも液状のまま保たれています。航空機が過冷水を含む雲層を通過する際、雲中の過冷水が航空機に接触すると、凝結核がある場所ですぐに氷となり、航空機の機体がその凝結核となります。
航空機の主翼に氷が付着すると、空気力への影響は非常に大きくなります。風洞試験によると、主翼の前縁に半インチ厚の氷が付着すると、揚力が50%減少し、抗力が60%増加し、深刻な場合は機体の破壊や人の死につながる重大な事故を引き起こす可能性があります。同じように深刻なのはエンジンの結氷です。もしエンジンカウルに氷が付着し、氷の塊がエンジン内部に吸い込まれると、ファンなどの重要な部品を破損し、エンジン故障を引き起こす可能性があり、その危害は言うまでもありません。
ボーイング737を例にすると、
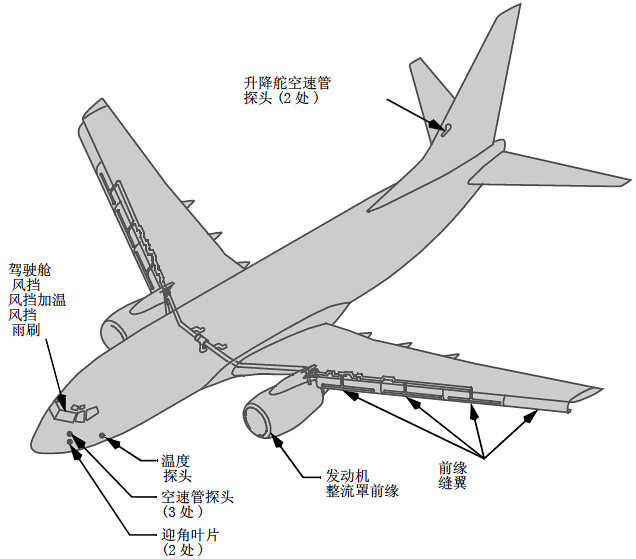 機上の防氷システムには通常、コックピットの風挡加温、風挡ワイパー、プローブおよびセンサー加温、エンジン防氷、主翼防氷、および着氷検出などのサブシステムが含まれます。
機上の防氷システムには通常、コックピットの風挡加温、風挡ワイパー、プローブおよびセンサー加温、エンジン防氷、主翼防氷、および着氷検出などのサブシステムが含まれます。ピトー管(ピトー管)プローブ、大気全温プローブ、および迎角ブレードはいずれも飛行データを取得する重要なセンサーであり、もし結氷のために飛行速度/気圧/温度などのデータを取得できない、または正しく取得できない場合、飛行コンピュータとパイロットは航空機を正しく操縦することができなくなります。そのため、これらの設備はすべて電気加熱を採用し、結氷しないように保っています(静圧孔は加熱しません)。
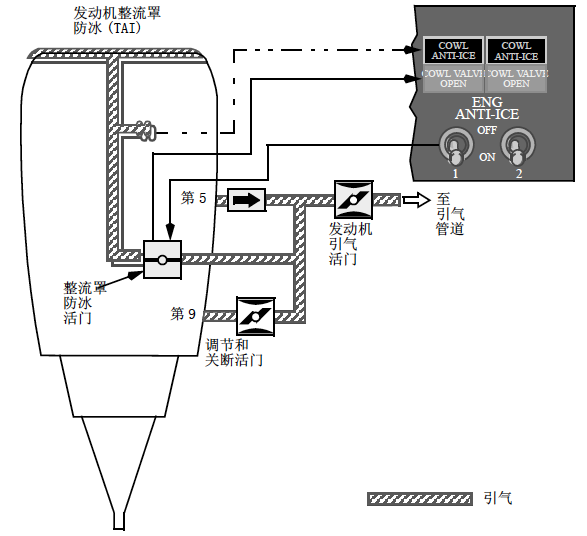
エンジン防氷システムは、エンジン内の高温高圧空気をエンジンカウルの前縁に導き、熱気を利用してカウルを加熱し、結氷を防ぐ目的を達成できます。コックピット内のENG ANTI-ICEスイッチでこのシステムの作動を制御できます。
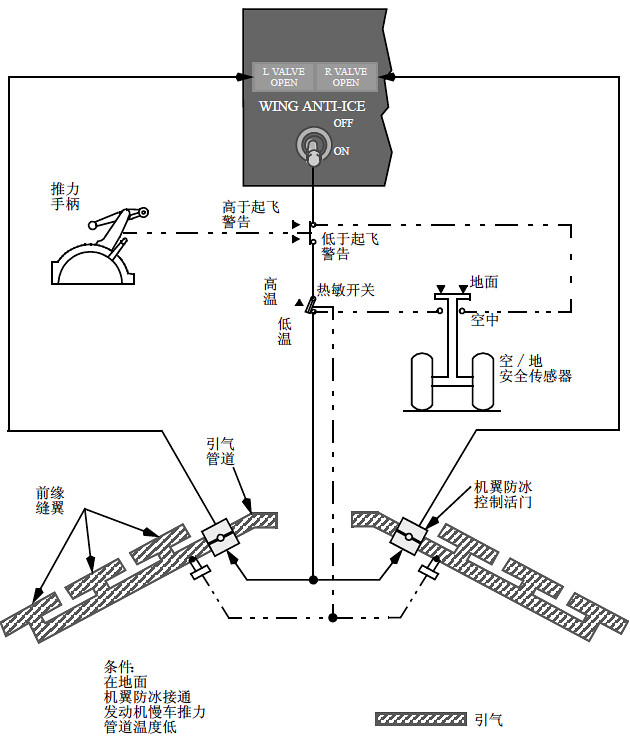
主翼防氷システムもエンジンの熱気を使用します。このシステムは内側の前縁スラットのみに保護を提供し、前縁フラップや外側の前縁スラットにはサービスしません。コックピット内のWING ANTI-ICEスイッチで制御されます。
完 <a href=Prev: 降下過程での空管交信 TOC: 目次 <a href=Next: アプローチレーダー誘導時の操作
-
旅客機操縦探秘5.6 降下中の空管交信
航空機の降下を開始する前には、必ず空中交通管制の許可を得る必要があります。本節では、巡航から降下フェーズにおける通信内容を簡単にまとめます。 引き続き、東京羽田空港から北海道札幌新千歳空港へ向かうAirSystem115便を例に挙げます。
航空機が札幌三沢西区域管制センターのエリアに入ると、東京管制区の管制官は当該便の管理を札幌三沢西区域に引き継ぐ必要があるため、指示を出します: “Air System 115, Contact Sapporo Control 133.3” つまり、 “Air System 115、札幌三沢西区域133.3へコンタクトしてください"という意味です。 パイロットは次のように回答します: “133.3 Air System 115” そして、無線周波数を133.3MHzに変更し、管制にコンタクトします: “Sapporo Control, Air System 115, FL410” これは、 “札幌管制、Air System 115です。現在の飛行高度は41000フィートです” という意味です。札幌三沢西部管制区の管制官が報告を受け取り、レーダーで確認できた場合、次のように回答します: “Air System 115, Sapporo Control, Roger” これは “Air System 115、札幌三沢西部管制区です、受信"を意味します。
航空機が札幌三沢西部管制区を飛び越えると、次は札幌北海道南区域管制センターに入ります。ここで再び引き継ぎの通信が行われます。 管制官:Air System 115, Contact Sapporo Control 119.3(Air System 115、札幌北海道南区域119.3へコンタクトしてください) パイロット:119.3, Air System 115 パイロット:Sapporo Control, Air System 115, FL410 管制官:Air System 115, Sapporo Control, Roger
この時、航空機は降下開始点(TOD)までもう間もなくです。パイロットはアプローチ・ブリーフィングと降下チェックリストを完了しており、管制からも降下指示が入ります。パイロットに対し、現在の高度から15000フィートまで降下するよう要求する通信は以下の通りです: “Air System 115, Decent follow discretion, Maintain FL150” これは、 “Air System 115、15000フィートまで降下して維持せよ、タイミングは裁量で(パイロットの判断に任せる)” という意味です。
-
旅客機のコックピット探検5.5 降下の開始
5.3節で標準計器到着進入(STAR)についてまとめた際、到着進入の開始ウェイポイントにおける位置と高度の情報をもとに、パイロットは予定到着時刻、燃料消費率、エンジン性能、風力・風向などの要素を考慮し、降下過程におけるエンジンの設定値と降下率を設定することができると述べました。
例えば、KAIHO到着進入プログラムは太平洋上にあるADDUMウェイポイントから始まり、最低経路高度は10000フィートです。巡航高度からADDUMまで降下するため、FMS(フライトマネジメントコンピュータ)の計算によると、航空機はADDUMの西側200キロメートルの地点から降下を開始する必要があります。
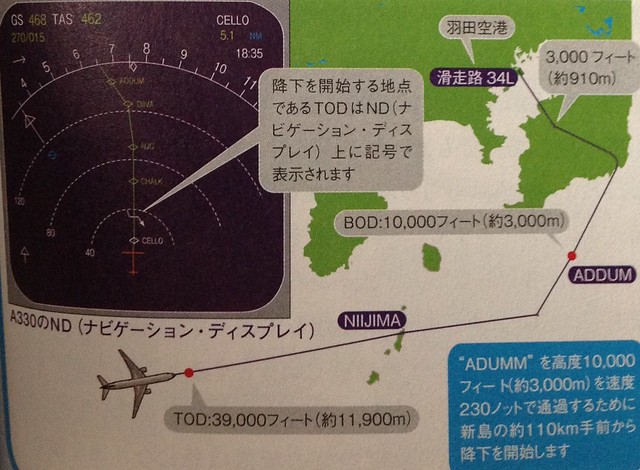 一般にこの地点を降下頂点またはTOD(T/Dと略記)と呼びます。ND(ナビゲーションディスプレイ)の地図モードでその表示を確認することができます。上の図のエアバス330では、矢印の付いた折れ線で示されており、その地点はCELLOとCHALKの Fixes(フィックス、定位点)の間に位置しています。なお、進入の開始点は降下底点またはBODと呼ばれます。
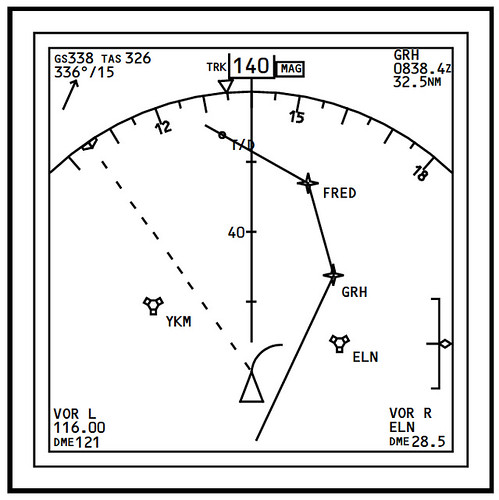
別の例として、ボーイング777のNDでは、T/Dの地点が直接示され、経路上の点で表されます。
一般にこの地点を降下頂点またはTOD(T/Dと略記)と呼びます。ND(ナビゲーションディスプレイ)の地図モードでその表示を確認することができます。上の図のエアバス330では、矢印の付いた折れ線で示されており、その地点はCELLOとCHALKの Fixes(フィックス、定位点)の間に位置しています。なお、進入の開始点は降下底点またはBODと呼ばれます。
別の例として、ボーイング777のNDでは、T/Dの地点が直接示され、経路上の点で表されます。
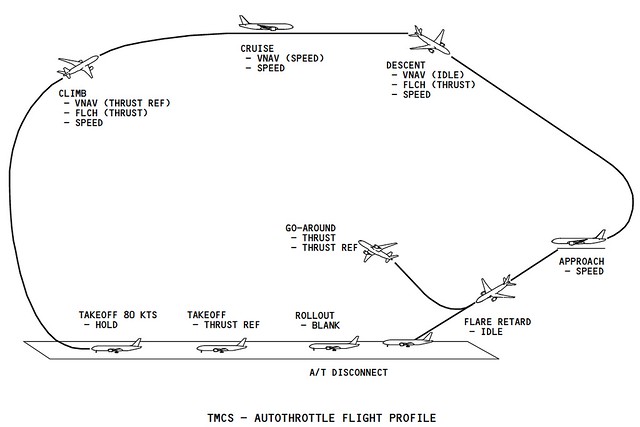
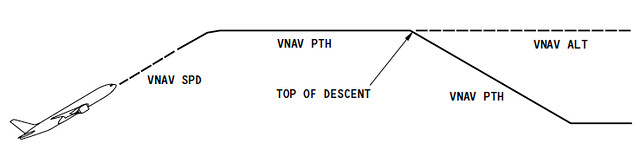
TODを過ぎると、航空機は自動的に高度の降下を開始します。フライト全体の概略図は以下の通りです。(この図は主に各飛行フェーズにおける自動スロットルの設定モードを説明するものですが、飛行プロセス全体を説明するのにも適しているため、ここで借用します。)
降下プロセスについて、必ず知っておくべき点は、航空機は昇降舵を下げて、つまり機首を下げて機体の高度を下げるわけではないということです。航空機はスロットル(油門)によって降下の勾配を制御します。
航空機が水平飛行から降下状態に入る際、スロットルを適度に絞ります。すると、航空機は速度を少し落とします。揚力と速度は正比例の関係にあるため、速度が減少すると揚力も減少し、結果として揚力が重力より小さくなるため、航空機は降下を始めます。降下時、飛行経路はもはや水平ではなく、ある角度で下向きに傾斜します。この時、翼の迎角は変化していませんが、航空機の進行方向が変わるため、真っ直ぐ前からやや下斜め前方へと変わります。その結果、翼の迎角が増え、揚力も増大します。そして、増加したこの迎角による揚力が、増加した重力の分を釣り合わせ、航空機に働くすべての外力が再び平衡し、等速降下の状態に入ります。
降下時は機首が下を向きます。この姿勢は推力の要求が非常に小さく、多くの場合、スロットルを完全にアイドル(閉じ)にして滑空することさえあります。飛行機に搭乗する際、降下の初期段階で機内が非常に静かになることに気づくはずです。降下中の航空機の姿勢を、下り坂を走る自動車に例えることができます。この時、アクセルを踏まなくても車は安定して下り、坂の勾配が大きければ速度も増し、勾配が小さければ速度は相対的に遅くなります。現代の航空機のフライトマネジメントコンピュータは、パイロットの要求に基づいて、スロットルと姿勢を適切に自動調整することができます。
一般的に、パイロットは2種類の降下方式、つまり一定速度を維持するか一定勾配を維持するかを設定できます。これはFMCのピッチ設定に対応し、VNAV SPD(垂直ナビゲーション・速度モード)またはVNAV PTH(垂直ナビゲーション・経路モード)を採用することができます。
VNAV SPD降下では、通常、自動スロットルシステムはアイドル状態を維持し、自動飛行操縦システム(AFDS)はFMC上の目標速度を維持するように制御します。
VNAV PTH降下では、フライトマネジメントコンピュータ(FMC)は通常、航空機が3度の降下勾配を維持するように制御し、TODとBODの間の速度はコンピュータによって自動制御されます。例えば、航空機が風の影響を受けて3度の勾配より上に逸れた場合、FMCは速度を少し増やし、航空機が元の勾配を維持するようにします。
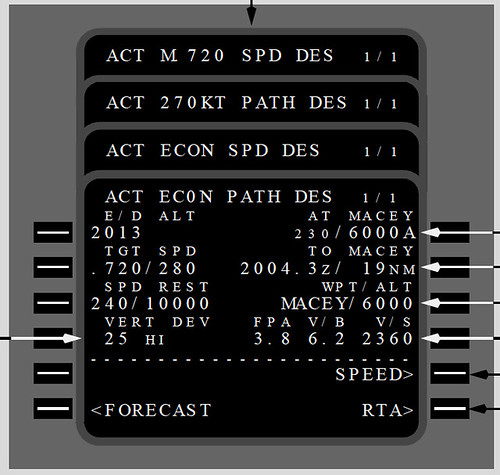 上の図はボーイング737のCDU画面です。同じVNAV PTH状態で、降下開始時に巡航中の「ACT ECON CRZ」から「ACT ECON PATH DES」モードに自動的に変わります。2Lには現在の速度値としてマッハ0.72、280ノットと表示され、3Lには速度制限が表示されています。これは、業界規則で10000フィート以下での飛行速度制限が250ノットと定められているため、この制限を超えないように、あえて速度制限を240ノットに設定しているからです。
上の図はボーイング737のCDU画面です。同じVNAV PTH状態で、降下開始時に巡航中の「ACT ECON CRZ」から「ACT ECON PATH DES」モードに自動的に変わります。2Lには現在の速度値としてマッハ0.72、280ノットと表示され、3Lには速度制限が表示されています。これは、業界規則で10000フィート以下での飛行速度制限が250ノットと定められているため、この制限を超えないように、あえて速度制限を240ノットに設定しているからです。
なぜ一般に3度の勾配で降下するのでしょうか? それは、3度の場合、高度と降下距離の関係を暗算で計算するのに最も適しているからです。以下の近似公式を用いると: 降下に必要な距離(海里)=飛行高度(フィート)/1000*3 簡単に估算することができます。 例えば、巡航高度33000フィートから地上まで降着する場合、飛行高度/1000*3により、99海里(約190キロメートル)という結果が得られます。したがって、航空機が33000フィート、つまり高度10キロメートルから降下してくるためには、少なくとも到着空港の外190キロメートルの地点から降下を開始する必要があります。
-
旅客機操縦探秘5.4 計器着飛行図
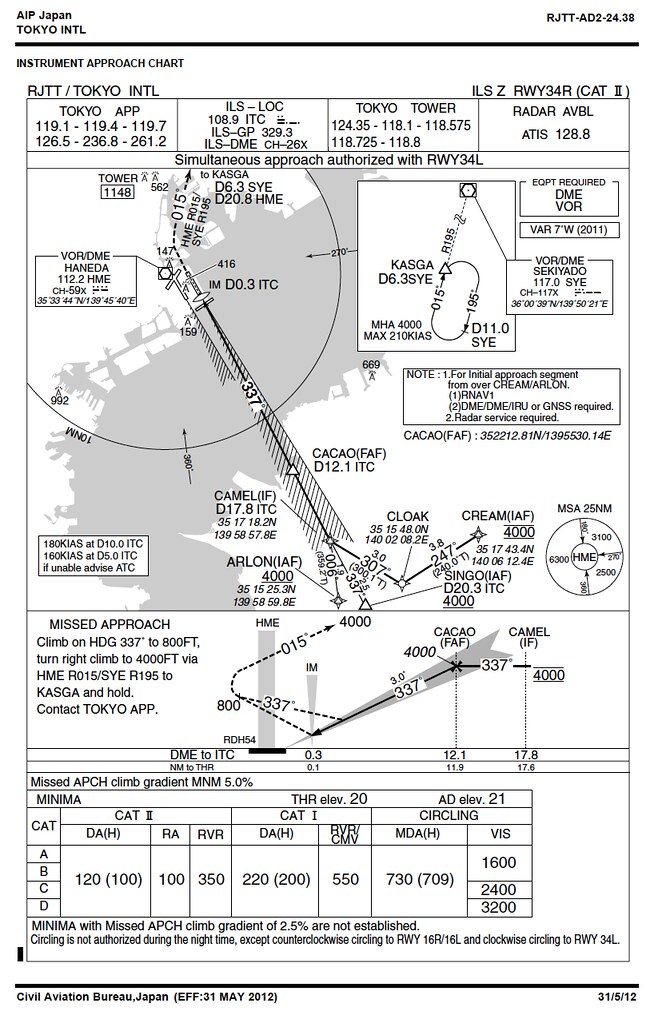
計器進入図を用いて、計器進入の手順を簡単にまとめてみましょう。例として、東京国際空港の ILS Z RWY34R (CAT II類) 手順を挙げます。
アプローチ (Approach) とは、着陸に向かって航空機が降下し、滑走路に正対して飛行する過程のことです。アプローチ段階では、航空機の高度を調整し、滑走路に正対させ、地上の障害物を回避する必要があります。パイロットは高度な集中力を必要とし、正確な操作が求められるため、アプローチには厳格な基準と手順が定められています。上記の “ILS Z RWY34R (CAT II類)” は、東京国際空港の34R滑走路へ進入する際の(最初の、Zで命名された手順。2番目はY、3番目はXとなる)計器進入プログラムの名称を指します。
空港の最終進入コースにおいて垂直方向の降下誘導(グライドパス)が提供されるかどうかによって、進入方式は精密進入と非精密進入の2つの大別に分類されます。精密進入の誘導に使用される航法施設には、計器着陸システム ILS (Instrument Landing System、通称「盲降」システム)、マイクロ波着陸システム MLS、および精密進入レーダー PAR があります。一方、非精密進入设备には VOR、NDB、LOC、GPS などが含まれます。ILS は知名度の高い自動着陸システムの一つですので、本節で紹介する ILS Zulu RWY34R (CAT II類) 進入図では、この精密進入 ILS プログラムを例に解説します。
進入段階は、通常、初期進入(初期進入定點 IAF から中間進入定点 IF まで。到着から進入への移行であり、航法設備に従って機首を滑走路方向へ向ける)、中間進入(中間進入定点 IF から最終進入定点 FAF まで。航跡を滑走路方向に保ち、水平飛行を行い、速度や姿勢を調整して最終進入へ円滑に移行する)、最終進入(最終進入定点 FAF から着陸復行点まで。着陸航跡に沿って降下し、滑走路中心線に正対し、決断高度まで降下する)、そして着陸復行のいくつかの段階から成ります。
計器進入図は計器進入プログラムの視覚的な図表表示であり、通報欄、平面図、断面図、着陸最低気象条件などの情報が含まれています。
まず最上部の通報欄を見てみましょう。ここにはパイロットが必要とする通信周波数が記載されています。
最初の項目である TOKYO APP(東京アプローチ管制)の周波数は合計6つあり、119.1、119.4、119.7、126.5、236.8、261.2 MHz です。具体的にどの周波数を使用するかは、到着時の管制の指示(ハンドオフ)によります。
2番目の項目は航法設備の周波数情報です。計器着陸システム ILS-LOC 局の周波数は 108.9 MHz です。続く ITC は34R滑走路の識別符号であり、その後ろにモールス符号が示されています。機上の航法設備で電波を捕捉した際、パイロットはこのモールス符号を聴取し、チューニング周波数が正しいかを確認する必要があります。 LOC(ローカライザ、Localizer の略)は ILS のサブシステムであり、航空機に水平方向の誘導を提供して、滑走路中心線の延長上を正しく飛行できるようにします。ILS-LOC 局の周波数は 108.9 MHz です。 GP(グライドパス、Glide Path の略。グライドスロープとも呼ばれる)は ILS のもう一つのサブシステムであり、垂直方向の誘導を提供して、航空機が正しい角度で降下できるようにします。ILS-GP の周波数は 329.3 MHz です。 また、ローカライザとグライドパスの<a href=“http://zh.wikipedia.org/ja-cn/仪表着陆系统#.E9.A2.91.E7.8E.87.E5.88.97.E8.A1.A8"搬送波周波数はペアになっており、一度の選択で両方の受信機をチューニングできるようになっています。 一番下の CH-26x は ILS-DME 測距儀のコードです。測距儀も空港内に設置された装置であり、パイロットに対して海里単位での滑走路までの直線距離(斜距)を提供します。

-
旅客機操縦の秘密 5.3 標準計器到着進路
前回のセクションで記述したアプローチ・ブリーフィングの対話は、レーダー誘導進入をベースにしています。一般的に交通量が多い場合、各便間の安全な間隔を管理するため、空管が各航空機の飛行方向、高度、速度を指示する、いわゆるレーダー誘導が行われます。しかし、交通量が少ない場合は、各空港の標準計器到着進路、つまりSTAR(Standard Instrument Arrival)が使用されることがよくあります。
STARは、航空路からの離脱から空港ターミナルエリアへの移行方法を提供します。一般的にSTARは、計器進入方式の開始点であるIAF(Initial Approach Fix)で終了します。STARを使用するメリットは、進入のルート構造を図示できるだけでなく、空管とパイロット間の交信手順を簡素化し、煩雑な進入指示を省くことにもあります。
一つの空港では、滑走路や針路ごとに複数の進入手順が定義されていることがよくあります。例えば東京国際空港(羽田)の場合、RNAV(エリアナビゲーション)の進入手順にはARLOG、CREAM、CACO、BACON、DATUM、NYLON、STEAM、BALAN、DARKS、DAIYA、KAIHOがあり、非RNAVの進入手順にはEGARI、SINGO、KENJI、NAGAIなどがあります。標準計器到着進路(STAR)の名称は、一般的にウェイポイントやフィックス(位置固定点)の名前に由来します。
エリアナビゲーションには、GPS、FMS、VOR/DMEなど複数のナビゲーション設備を搭載する必要があります。あらかじめ定められたウェイポイントを使用し、経緯度座標やVOR/DMEなどの地上設備からの相対距離と方位を用いて航空機の位置を特定することで、飛行の効率を高めます。
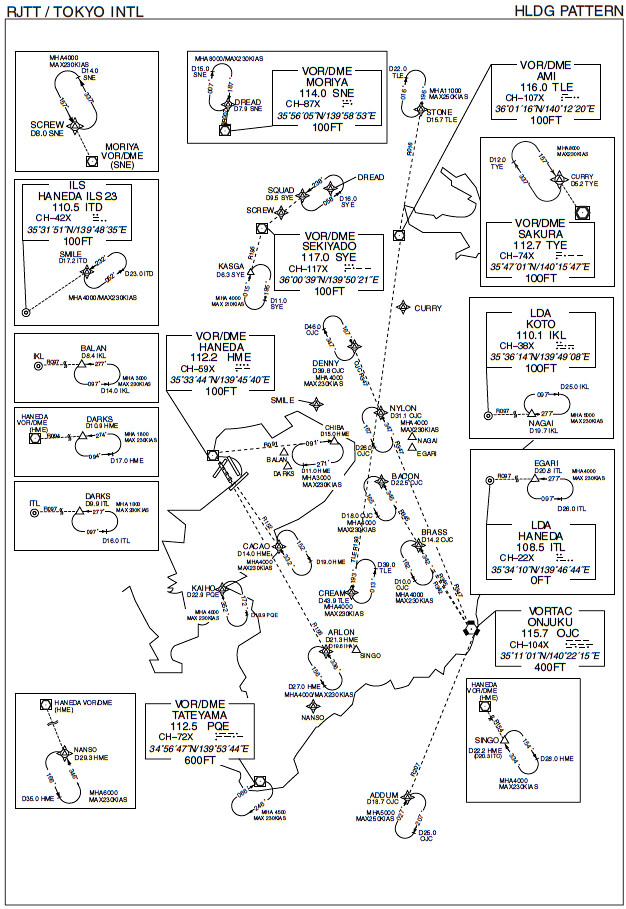
以下では、東京国際空港のKAIHO STAR図を用いて、標準計器到着進路について簡単にまとめてみます。
右のタイトル欄には「STAR RWY34L/R」と記載があるため、これが34L/R滑走路を使用して着陸するための進入手順であることがわかります。
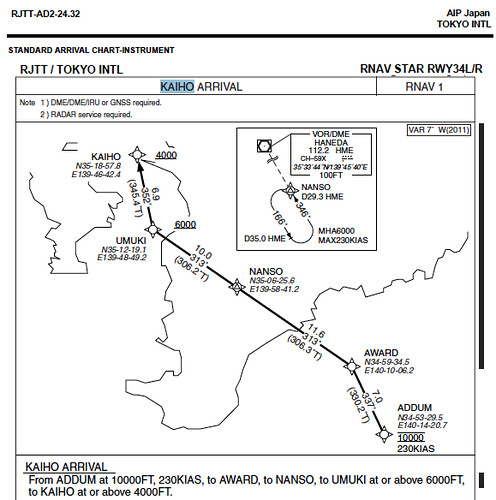
まず、NOTEにある注意事項を見てみましょう。この手順を実行するには、航空機がDME/DME/IRUまたはGNSSのナビゲーション設備を搭載していること、およびレーダー誘導サービスを受信する必要があることが示されています。
NOTEの下には進入図の平面図があります。図の中央は海に突き出した千葉県の房総半島、左側は神奈川県の三浦半島であり、その二つの半島の間が東京湾です。東京国際空港の位置は図示されていませんが、針路矢印の方向から、空港は図の左上外側にあることが推測できます。
KAIHO進入手順は、太平洋上にある図の右下の四角い星印のADDUMウェイポイントから始まります。図にはその経緯度および飛行条件の制限(最低経路高度10000フィート、最大速度230ノット)が示されています。この条件に基づき、パイロットは予定到着時刻、燃料消費率、エンジン性能などを考慮して、降下時のエンジン設定や降下率を設定することができます。一般的にRNAVナビゲーションのウェイポイントは四角い星印で示され、VOR/DMEフィックスは三角形で示されます。
ADDUMの次のウェイポイントは、同じく海中にあるAWARDです。図にはAWARDの経緯度、およびこの区間の距離と方位(7海里、磁針路337度)が記載されています。平面図の右上には、この区域の磁偏角が西7度であることが示されており、真針路330度も併記されています。
次のウェイポイントは陸上にあり、千葉県房総半島中部のNANSOです。AWARD到着後、航空機は方向を修正し、313度の針路で房総半島を横断します。NANSOを経て11.6海里飛行した後、東京湾内にあるUMUKIウェイポイントへ向かいます。UMUKIウェイポイントの右側に6000フィートの高度標識があるのが見えるため、この時点で航空機は6000フィート以上に高度を下げる必要があります。
UMUKIに到着した後、航空機は再度方向を修正し、352度の針路で北へ向かいKAIHOへ向かいます。6.9海里飛行してKAIHOに到着した時点で、航空機は高度4000フィート以上に降下している必要があります。
また、平面図の上部にある四角い枠内には、標準待機手順(軌跡は運動場のトラックによく似ています)が示されています。もしATCから進入許可を得られなかった場合、NANSO到着後にNANSOをインバウンドコースとして左旋回の標準待機手順を実行する必要があります。NANSOの位置は、羽田(HME)VOR/DME局を用いて確認することもできます。この局の周波数は112.2MHzで、346度のラジアル線に入り、DME距離は29.3海里です。
待機手順は、管制員が繁忙空港や悪天候時に交通整理を行い、航空機間に必要な間隔を維持するために設けられた飛行手順です。ホールディングパターンは、待機フィックス、待機方向、アウトバウンドコースの長さ、最低ホールディング高度(MHA)、最大ホールディング速度(MAX)などの情報で構成されます。上図を見ると、待機フィックスはNANSO、インバウンドコース346度、待機方向166度、アウトバウンドレグの長さは羽田VOR/DMEにて35海里、最低ホールディング高度6000フィート、最大ホールディング速度230ノットとなっています。管制員から指示がない場合、航空機はホールディングパターンに従って空中で旋回を続け、進入の順番を待ったり、天候が回復するのを待つことになります。
次に、羽田空港近郊で規定されているすべての待機手順を見てみましょう。東京湾の周囲には、十数個のホールディングパターンが密集して定義されています。各コースごとに異なる高度を設定できるため、同一コースを同時に数機の航空機が飛行することが可能です。
航空機がIAFに到着すると、計器進入方式が開始されます。次のセクションでは、計器進入図の見方についてまとめます。
Prev: アプローチ・ブリーフィング TOC: 目次 Next: 標準計器進入方式
完
-
旅客機の操縦探秘5.2 アプローチ・ブリーフィング
フライトブリーフィングとは、フライトのある段階や動作を実施する前に、操縦するパイロットがもう一人のパイロットに対して、実施しようとする意図を説明することです。つまり、ある動作に対する正常および異常時のフライトプログラム、操作の要領、注意事項、およびクルーの役割分担を簡単に復唱し、クルーメンバー各自の職務を明確にします。正常時にはどうするか、異常時にはどのように連携するかを確認するもので、戦前の演習のようなものです。
アプローチブリーフィングを例に挙げると、その要求は次の通りです。アプローチブリーフィングはPF(操縦士)が行い、声ははっきりとし、クルー全員がその意図を理解している必要があります。アプローチブリーフィングはアプローチ準備の重要な手順であり、着席している二人のパイロットは計器進入図を用いて、上から下へ計器進入の内容を復習し、ディバーチャートーの計画を考慮しなければなりません。アプローチブリーフィングの説明中、もう一人のパイロットは注意深く聞き、必要に応じて修正を行い合意に達する必要があります。アプローチブリーフィングは要点を捉え、簡潔にする必要があり、上記の内容をすべて網羅する必要はありません。特別な状況や、着進入の要素のいずれかが通常の手順と異なる場合、アプローチブリーフィングには関連する内容を含める必要があります。
– 以上は百度百科からの抜粋です
一般的なアプローチ手順は、到着、初期、中間、最終、およびゴーアラウンドの5つの段階に分けられます。
(1) 到着段階:エンルート段階から手順に使用される無線局またはフィックス(初期アプローチフィックス)までの到着ルートを指し、このルートは到着図に示されています。この段階では、パイロットは降下経路を有効に制御することに注意を払う必要があります。 (2) 初期アプローチ段階:初期アプローチフィックス(IAF)から始まり、中間フィックス(IF)で終了します。初期アプローチ段階では、航空機は構造されたエンルートを離脱し、中間アプローチ段階に向けて機動飛行を行っています。 (3) 中間アプローチ段階:最終アプローチフィックス(FAF)がある場合、中間アプローチ段階の開始は、プロシージャルターンとベラインターンにおいて航空機が入域コースに乗ったときです。直行コース(レーサートラック)飛行の場合、航空機はすでに最終アプローチコースに乗っています。最終アプローチフィックス(FAF)がない場合、ステーションへの飛行が最終アプローチセグメントとなります。このセグメントでは、航空機の速度と外部形態を調整し、最終アプローチに入る準備をする必要があります。 (4) 最終アプローチ段階:このセグメントでは、航空機はコースを維持して降下し着陸します。 (4.1)非精密アプローチの最終アプローチ(FAFあり):最終アプローチセグメントの開始は無線局またはフィックス(FAF)であり、FAFからMAP点までが最終アプローチ段階です。 (4.2)精密アプローチの最終アプローチ:航空機がグライドスロープに捕捉された点(FAP)から、ミストアプローチ点(MAP)までです。 (5) ゴーアラウンド段階:決心高度(DH)に到達後、必要な目視参照を得ることができない場合、直ちに引き起こし動作を開始する段階です。ゴーアラウンド段階では、航空機の外部形態、姿勢、および高度を変更します。ゴーアラウンド段階は、初期、中間、最終ゴーアラウンド段階に分けられます。初期ゴーアラウンド段階はMAP点から上昇が確立するまでを指します。中間ゴーアラウンド段階は、直線上昇で50メートルの超過余度(オバクリアランス)に達するまでです。最終ゴーアラウンド段階は、50メートルの超過余度から別のアプローチ、ホールディング、またはエンルートへ戻るまでです。初期アプローチからゴーアラウンドまで、すべての情報はアプローチ図に示されています。
– 以上はネット上の山東航空会社飛行部の資料"ILSファイナルアプローチの体会"という記事からの抜粋です
では、アプローチブリーフィングの具体的な内容とは一体何なのでしょうか? 偶然にも、手元にある<a href=“http://book.douban.com/subject/10792347/"機長席という本に、あるフライトでのコックピット内での詳細な解説が載っており、現場の録音CDも付属しています。パイロット同士のやり取りや航空交通管制との交信が生き生きと再現されており、非常に良い一次資料となります。以下では、この本の内容(羽田空港へ向かって着陸する準備をしている際の会話)を翻訳してみます。

副操縦士: 「羽田空港の駐機場スペースは2番スポットです。滑走路16Lに関するNOTAM情報はありません。」
機長: 「NOTAMなし、了解した。
滑走路16Lへの着陸を計画、風向き200度、17ノット、うん、右風だ。 天気は良好。雲なし。気温14度、露点温度2度。高度計設定値3019。
VOR/DME 16Lアプローチを使用。 レーダー誘導による到着手順。 MDA(最低降下高度)は1000フィート。 KWE江東VORの方位は320度。 (注:2009年から江東VORは廃止され、新しい台場VORに置き換えられました。『機長席』という本は1999年出版で、江東VORは当時使用されていたVOR設備です。KWE VOR/DMEは放射線のついた円で表され、内部は黒い塗りつぶしの円になっており、その位置は下図の上部中央で見つけることができます。)
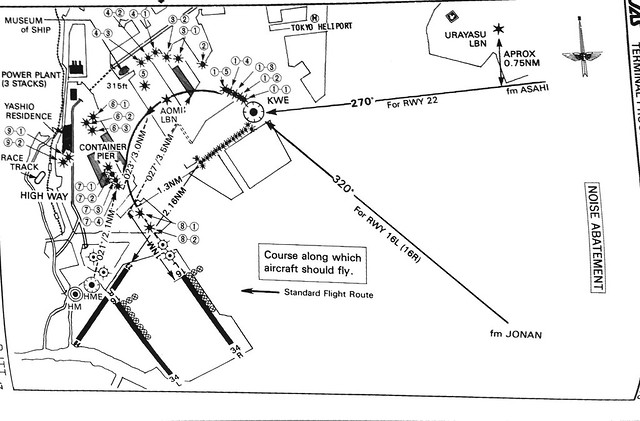
最終セグメントではL-NAV水平自動ナビゲーションモードを使用します。 江東VORの北側で市街地の騒音を低減するため、できるだけ北へ曲がらず、できるだけ早く左に旋回します。 最後は手動で、垂直偏差およびフライトパスベクトル(PFD上)に基づいてアプローチを行います。
ゴーアラウンド時は私が指示します。 正の上昇率を確認してから降着装置を格納します。 ゴーアラウンドルートは浦賀、館山方面です。 高度4500フィートまで上昇します。 できるだけ早く塔と通信をとり、再びレーダー誘導を受けます。
垂直方向はV-NAVを使用。 ファイナルの高度は1500フィートと推定。 着陸フラップは30度。 VREF(基準速度、この場合はフラップ30着陸形態における着陸速度)は130ノット。 オートブレーキは2に設定。
着陸後の滑走路出口はC4、J3を予定。駐機場は2番スポット。
何か質問は?」
副操縦士:「問題ありません」
アプローチブリーフィングが終わった後、副操縦士は降下手順を実行する必要があり、上記で決定した各種データをFMSに入力し、機長が確認して間違いがないことを正式に完了します。例えば上記のVREFは、CUDのアプローチ基準(APPROACH REF)ページに入力する必要があります。
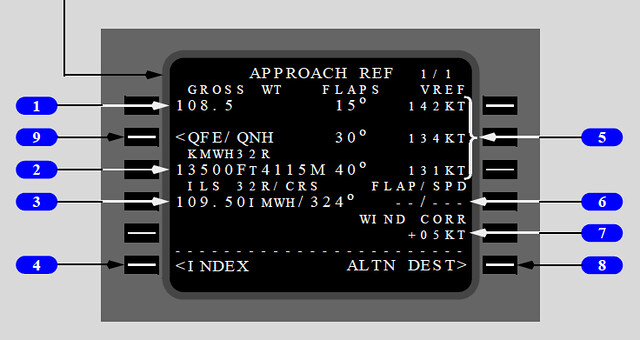 上図の"5"の矢印が指している箇所がその項目の設定です。
上図の"5"の矢印が指している箇所がその項目の設定です。ブレーキ設定スイッチは中央前面パネルにあり、副操縦士はオートブレーキ(AUTO BRAKE)選択スイッチを必要なブレーキ設定に設定する必要があります。
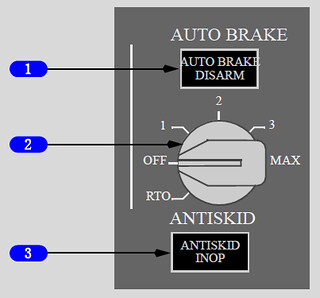 上の図はボーイング737のブレーキ設定パネルです。
上の図はボーイング737のブレーキ設定パネルです。上記の例では到着手順(アプローチ)の説明を省略してしまったため、次の節では標準計器到着手順STARに関する知識を補足してまとめるつもりです。また、パイロットが使用する計器進入手順についても、別の節を設けて書くつもりです。なぜなら、これらの知識は航空機の飛行ルートを理解する上で非常に重要だからです。
Prev: 降下準備 TOC: 目次 Next: STAR標準計器到着手順
完
-
旅客機のコックピット探訪5.1 降下の準備
機体が目的地空港に接近し、機長と副操縦士は降下の準備を開始します。
一般的に、降下の準備とアプローチ/復飛のブリーフィングは、降下降始点(TOD)の10分前までに完了させる必要があります。これにより、降下を開始する適切なタイミングを逃さないようにします。
まず、目的地の情報を把握する必要があります。もし現地の天候が悪く、台風などのために着陸できない条件になっている場合、あるいは地震が発生したばかりで滑走路の安全が確保できないなどの状況では、代替空港へ向かうことを検討する必要があります。
現地空港の情報はATISで取得できます。 自動端末情報サービス(Automatic Terminal Information System、略称ATISまたは情報通報)は、繁忙な空港で自動的に継続放送される情報サービスです。通常、単独の無線周波数で放送され、天候、使用滑走路、気圧および高度計の設定値など、主な飛行関連情報が含まれます。
通常、通報は30分または1時間ごとに更新されますが、天候の変化が激しい場合は随時更新され、A、B、C…Zのアルファベットコードで順次表現され、ICAOが公布した標準的なアルファベット解読法に従って判読されます。
パイロットがATISを取得するには、ACARSデータリンクシステムを使用するか、直接無線局の音声サービスを聴取します。
ACARSシステムは、ACARS管理ユニット(MU)と呼ばれるアビオニクスコンピュータと、制御表示ユニット(CDU)で構成されています。MUは地上からのVHF無線デジタルメッセージの送受信に使用され、データはディスプレイに表示されます。また、コックピット内のプリンターでデータを印刷することもできます。(個人PCにACARSデコードソフトがあれば、自宅でもACARS情報を受信できます。例えば、航空機の対気速度や高度、経度緯度などが確認できます。私は<a href=“http://www.plala.or.jp/hikokibiyori/soft/kgacars/index.>KG-ACARSという無料ソフトをおすすめします。興味があれば試してみてください。)
直接音声を聴取する場合は、一般の交通管制の会話を聴くのと同じです。目的地空港の情報にあるATIS周波数を調べ、機上の通信機をその周波数に合わせ、スピーカーまたはヘッドフォンで聴取することができます。以下は北京首都国際空港の航空交通サービス通信施設情報です。ATISには2つの周波数、127.6MHzと128.65MHzがあることがわかります。
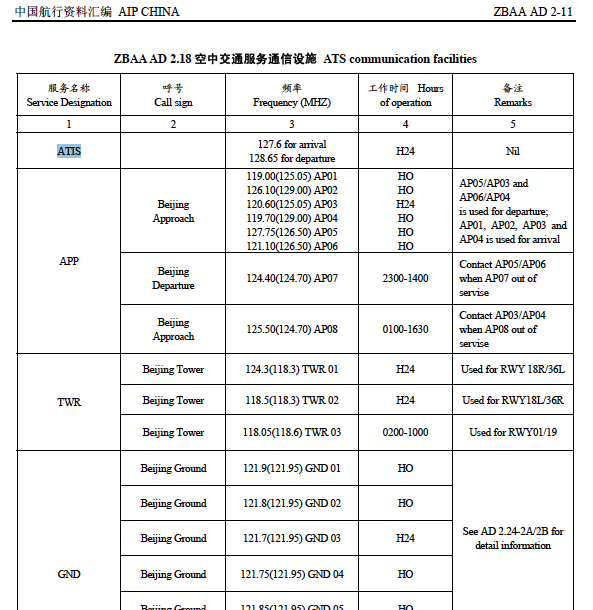
航空バンド対応のラジオを持ち、空港の一定範囲内にいれば、その空港のATISサービスを聴くことができます。一般的にその内容は次のようなものです(私の家の近くにある羽田空港を例にします):
“Tokyo International Airport,information Kilo,2130, ILS Zulu Runway 34L approach, Landing Runway 34L, Departure Runway 05 and 34R, Departure Frequency, 126.0 Runway05, 123.8 Runway34R Wind 180 degrees 6 knots, Direction variable between 160 and 230 degree, Visibility 9 km, Few 1 thousand 5 hundred cumulus,Bkn 14 thousands altocumulus Temperature 20, dewpoint 15 QNH 29.80 inches Advise you have information Kilo”
簡単に翻訳すると、意味は以下の通りです:
空港名 Tokyo International Airport (東京国際空港) 情報コード information Kilo (情報コードはK) 観測時間 2130 グリニッジ標準時21時30分発行 予想アプローチ種別 ILS Zulu Runway 34L approach 計器航法ILS Z 34L滑走路を使用したアプローチ手順 使用滑走路 Landing Runway 34L, Departure Runway 05 and 34R 離陸滑走路34L、着陸は05と34R 通知事項(出発周波数など) Departure Frequency, 126.0 Runway05, 123.8 Runway34R 離陸用塔周波数、05滑走路は126.0MHz、34R滑走路は123.8MHz使用 その他の重要事項(滑走路の路面状況、ブレーキ効果、故障情報など) なし 気象情報 地上風向、風速 Wind 180 degrees 6 knots 風向180度(南風)、風速6ノット 風向、風速変動 Direction variable between 160 and 230 degree 方向は160度から230度の間で変動 視程、滑走路視程 Visibility 9 km (5キロメートル以下はメートル、以上はキロメートル)9キロメートル 現在天候 雲量、雲底高 Few 1 thousand 5 hundred cumulus,Bkn 14 thousands altocumulus 少量の雲 高度1500フィートの積雲、高度14000フィートの高積雲、雲量多 大気温度、露点 Temperature 20, dewpoint 15 温度20度、露点15度。 高度計設定値 QNH 29.80 inches 天気傾向 特別情報 情報コード Advise you have information Kilo
※露点とは、空気中に含まれる気体の水が飽和して液体の水に凝結するために必要な降至温度です。この温度では、凝結した水が空中に浮遊しているものを霧、固体表面に付着したものを露と呼ぶことから、露点という名前が付いています。相対湿度が高いほど、露点は気温に近くなります。相対湿度が100%に達すると、露点と気温は等しくなります。露点は、エンジンの着氷や霧の発生可能性を計算するために使用されるため、パイロットにとって露点は重要なデータです。
-
旅客機の操縦探検4.9 コックピット内
航空機が巡航段階に入った後も、パイロットは常に各種飛行データを監視し続ける必要がありますが、コックピット内の雰囲気は離陸時よりも確かにリラックスしたものになります。次のチェックポイントに到着するまでの短い休憩時間を利用して、パイロットは食事をしたり、飲み物を頼んだり、トイレに行ったり、あるいは雑談をしたりすることもできます。
パイロットの食事について一つ知っておくべきなのは、機長と副操縦士は絶対に同じ機内食を食べてはならないということです。これは主に、万が一食中毒などの予期せぬ事態が発生した際に、二人のパイロットとも操縦任務を継続できなくなる事態を防ぐためです。もちろん、現在の航空会社が提供する機内食の品質には全く問題ありませんが、安全のためこの規定は厳格に実施されています。そのため、客室乗務員がコックピットに来てパイロットに尋ねる際、例えば今日の機内食が中華と西洋の二種類だとすると、機長が中華を選んだ場合、副操縦士は自動的に西洋料理を食べることになります。
パイロットの食事時間も分けられています。例えば機長が食事をしている間、副操縦士が操縦任務の全責任を持ち、機長の食事が終わった後、二人の役割を交代し、副操縦士が食事をし、機長が操縦の全責任を持ちます。もちろん飛行中、パイロットがレストランでゆっくり美味しい食事を楽しむようなことは不可能です。一般的に彼らは慌てて食事を終え、食事中も常に目の前の飛行計器を監視し、耳を澄まして航空交通管制の通話を聞き、いつ発生するかわからない事態に対応できるようにしています。
一般に国内便は短距離なので、パイロット2名で十分です。しかし、欧米やアメリカへの長距離国際便など、飛行時間が10時間を超える場合は、3名のパイロット編成とし、交代で操縦して任務を遂行する必要があります。この時の編成は通常、機長2名(A、B)と副操縦士1名です。まず、機長Aと副操縦士が操縦を担当し、もう一人の機長Bは休息を取ります。B機長が4時間休息を取った後、A機長と交代でA機長は4時間休息を取り、B機長は左側の機長席に着きます。4時間後、A機長は機長席に戻り、副操縦士は休息に行きます。この時、B機長は副操縦士席に座り、残りの路程の任務を遂行します。
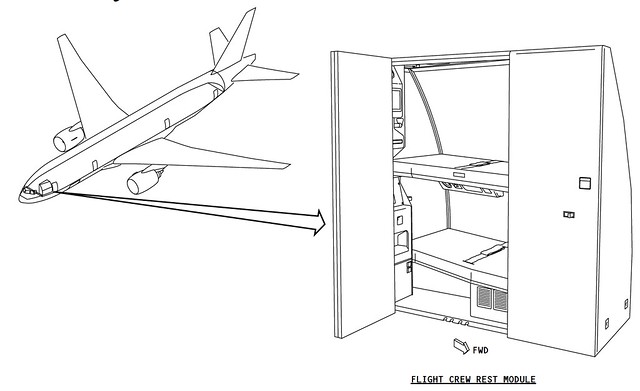
パイロットの休息中に何をするかについて特別な規定は特にないので、パイロットは各自の好みにより、少し寝たり、書類や雑誌を読んだり、音楽を聴いたりします。 下の写真はボーイング777のコックピット後部にある乗員休憩室で、2段のベッド構成になっているのがわかります。内部空間は比較的広くて快適です。
機長と副操縦士はそれぞれの仕事分担が異なりますが、時には二人の間で任務を交換する必要があります。例えば、機長が巡航に入った後、機内乗客へ放送する時には航空機の操縦を副操縦士に任せますし、副操縦士が航空会社専用通話チャンネルで会社と連絡を取る時には、航空管制の通話を機長に任せます。もちろん食事の時なども同様です。この時、二人の間には以下のような会話が交わされます。 機長:「You have control」 副操縦士:「I have control」 または 副操縦士:「You have ATC」 機長:「I have ATC」 など。 また例えば、航空管制から航路変更の通知を受信した後、副操縦士がFMC/CDUで航路を修正し、機長に再確認を求める時にも同様の会話が行われます。
私が非常に尊敬している<a href=“http://weibo.com/aibbus320boeing737"東方航空のベテラン機長、劉志敏氏(「楞娃一个」)がかつてWeiboでこう言ったことがあります。パイロットの仕事を非常によく要約しています。「機長の職責は、危険源を識別し、管理措置を講じ、リスクを許容可能な範囲内に抑えることである。」
空中で緊急事態が発生する可能性の一つとして、乗客の中で急病が発生する場合があります。乗客に医師がいれば一時的な処置ができますが、医師がいない、または緊急に病院へ搬送する必要がある場合は、パイロットは航路を変更し、条件に合った近くの空港を探し、航空管制と連絡を取り、緊急着陸手順などを実行する必要があります。
フライトの目的地で異常事態が発生した場合、例えばテロ事件、地震、悪天候など、パイロットはフライトを継続するか出発地へ引き返すかを判断する必要があります。航路の臨界点(すなわち最大復航点、Point of No Return)は、対気速度や風向などに基づいて事前に計算された航路時間の中間点です。例えばグリニッジ標準時16時25分と設定されたとします。臨界点の前に何か異常が発生した場合、パイロットは復航手順を実行できますが、この点を過ぎてしまった場合、パイロットは目的地の方向へ飛行し続けなければならず、最新情報を収集してダイバートが必要かどうかを判断します。
パイロットは飛行中に発生しうる様々な危険や異常事態に対して、厳しいシミュレーション訓練を受けています。また、操縦技術が低下しないように、年2回の緊急シミュレーション訓練を定期的に受けることが義務付けられています。皆さんもご存知のように、最新のフライトシミュレーターは非常に進歩しており、外部視界、計器、制御機器、機体の姿勢などが非常にリアルで、実機と大きな違いはありません。過去のシミュレーター技術が未熟な時期には、緊急時の訓練は実際の航空機で行われていましたが、現代のシミュレーターでは同等の訓練水準を高効率かつ低コストで達成できます。また、シミュレーターでは実機では不可能な訓練、例えばエンジン火災、機体損傷などもシミュレートでき、これらの訓練は様々な異常事態に対処するパイロットの技術向上に大きく役立ちます。訓練中、パイロットは精神的に高度に集中しなければならず、こうした訓練を一度終えるたびに、彼らは大汗をかいて疲れ果てます。このことからも、訓練のリアリティと厳しさがわかります。
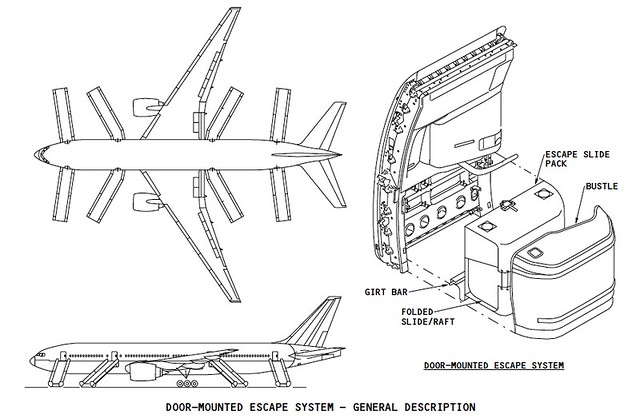
ちなみに、有名な「90秒ルール」について触れておきましょう。これは、旅客座席数が44席を超える各型式の航空機は、乗員を含む満載乗員を90秒以内に機内から撤离(脱出)させることができなければならないというものです。この条件を満たさない航空機は、各国政府の航空部門の耐空証明を通過できず、旅客運航に就航することはできません。旅客機には、搭乗口や貨物室ドアの他に、普段は開かず緊急事態発生時にのみ開かれる非常口があります。最近のニュースで、中国のある乗客が好奇心から勝手に航空機の非常口を開けてしまったという報道がありましたが、同胞の皆さんにはより多くの航空知識を普及していただき、このような無知な行為を二度としないでほしいものです。 下の写真はボーイング777-200型旅客機の各非常口と緊急滑り台の位置を示す概略図です。
121.5メガヘルツは緊急専用の通話周波数であり、航空交通管制部門は各種の異常事態に対応するため常時この周波数を監視しています。一般的に大型航空機もこの周波数を常に監視しています。もし万一のことが起き、人命に関わり、自力では救済できず、直ちに救援を必要とする場合には、レーダー・トランスポンダーを7700に設定し、「Mayday」で呼びかけて救援を要請します。 例: 「Mayday,Mayday,Mayday,abc1234,abc1234,engine failure,force landing to xxxx, request search and rescue」 意味は「Mayday、abc1234便エンジン停止、xxxxへ緊急着陸、搜索救援要請」です。 ここで、Maydayと自機の便名は3回呼び出すことに注意してください。 Maydayよりも緊急度が低い場合には、Pan-Panを使用して救援を求めます。 例: 「Pan,Pan,Pan,abc1234,abc1234,abc1234,over xxxx,4500feet,engine trouble,request landing priority to xxxx airport」 意味は「Pan,Pan,Pan,abc1234便、xxxx上空4500フィート、エンジントラブル、xxxx空港への優先着陸を要請」です。 これを受けた管制は、空で聞いているすべての航空機に対して以下のように通知します。 「All aircraft concern to xxxx tower,keep radio silence until further advice due to emergency situation occur」 つまり、緊急事態が発生したため、新しい通知があるまで他のすべての航空機は無線封鎖(電波 Silence)を維持するよう求めます。
-
旅客機の操縦探訪4.8 気象と乱気流について(続編)
日本語
前回の解説では乱気流の原因として積乱雲について触れませんでしたので、ここで補足しておきます。
 積乱雲は外見上非常に壮観であり、自然景観としては非常に魅力的ですが、航空機にとって積乱雲に飛び込むことは非常に危険なことです。積乱雲の中では非常に強い上昇気流と下降気流が交互に存在しており、そのエネルギーは航空機の机体に大きな損傷を与え、墜落という惨事を引き起こす可能性さえあります。たとえ積乱雲に飛び込まなくても、雲の上を飛行したり、その横を通過するだけでも、乗客が負傷するような強い乱気流に遭遇することがあります。また、雲の中の雹(ひょう)や、雲層に近い雷も航空機の机体に被害を与えることがあります。
積乱雲は外見上非常に壮観であり、自然景観としては非常に魅力的ですが、航空機にとって積乱雲に飛び込むことは非常に危険なことです。積乱雲の中では非常に強い上昇気流と下降気流が交互に存在しており、そのエネルギーは航空機の机体に大きな損傷を与え、墜落という惨事を引き起こす可能性さえあります。たとえ積乱雲に飛び込まなくても、雲の上を飛行したり、その横を通過するだけでも、乗客が負傷するような強い乱気流に遭遇することがあります。また、雲の中の雹(ひょう)や、雲層に近い雷も航空機の机体に被害を与えることがあります。
パイロットは主として気象レーダーを用いて積乱雲を回避しますが、もし巨大な壁のように航空路の前方にそびえ立っているような場合は、前回紹介したような航空路を大幅に変更する方法をとることができません。そのため、パイロットは客室のシートベルトの灯を点灯させ、乗客および客室乗務員に座席に着くよう求めます。このとき、パイロットは主に手動操縦を行い、雲の中の隙間を探すことに集中し、左右に機体を動かしながら、できるだけ乱気流の少ない空域を探して、雲域を通り抜けるまで続けます。ときにはパイロットが奮闘した結果、雲域を無事に通過しても機内では一度も揺れが生じないことがあります。しかし、その場合、内情を知らない乗客は「わざわざ座席にじっとしてさせるくせに、全然揺れていないじゃないか」と不満を漏らし、まるでパイロットの予測が外れたかのように思うことがあります。これこそがパイロットの懸命な努力の結果なのですが、皆さん、どうか誤解しないでください。
積乱雲の成因や形状は地域によって様々であり、大陸や海上、温帯や熱帯、昼間や夜間など、パイロットは多くの気象条件を理解する必要があります。例えば、アメリカ大陸の積乱雲は非常に特徴的です。メキシコ湾上空で発生した大量の水蒸気を含んだ気流が、大陸中部の乾燥した空気と出会うことで、直径200キロメートルにも及ぶ巨大な単一の積乱雲が発生します。これほど巨大な雲の場合、飛行ルートは必ずこのエリアを回避しなければなりません。また、例えば日本海の冬の積乱雲は、雲高がそれほど高くないため、遠くから見てもその存在は目立ちません。海上には広い範囲に層雲が広がっていることがあり、積乱雲がその層雲に隠れていることがあります。このとき、上空から見下ろすと、雲の中に多くの空洞があることがありますが、これらが積乱雲である可能性があります。
パイロットの乱気流に対する対策についても、ここで少し補足しておきます。
乱気流が発生した後、パイロットは同じ高度での飛行を継続するか、それとも上昇または降下して新しい高度で巡航するかを判断する必要があります。このとき、パイロットは天気図、特に立体的な天気図の情報を記憶し、乱気流の原因を正しく分析する必要があります。そのため、飛行中、パイロットは常に風速・風向や外気温度の変化に注意を払い、外部の雲の形状を観察し、ATCの交信を聞くことで、正しい判断を下すために様々な情報を収集します。
例えば、寒気団と暖気団が接触する狭い遷移地帯である「前線」は、傾斜した角度を持っています。一般的に、外気温度が低下した後に乱気流が始まった場合は、高度を下げれば乱気流域をより早く通り抜けることができます。逆に温度が上昇した後に乱気流が始まった場合は、高度を上げればその前線帯を早く通り抜けることができます。

高空のジェット気流についてですが、これは高速で流れる空気のパイプのような形状を形成します。このパイプの中に飛び込むときや抜け出すときにはある程度の揺れが生じますが、一般的にその中心部に入れば非常に安定しており、乱気流は発生しません。しかし、風速が時速90キロメートルを超えると、乱気流が発生する可能性が高くなります。このときの飛行は非常に慎重に行う必要があり、特にPFD(プライマリ・フライト・ディスプレイ)上のマッハ数表示に注意を払う必要があります。音速は温度によって変動するため、もしマッハ数の値が大きくなったり小さくなったりし始めたら、それは付近の空気の温度が微妙に変化し始めていることを示しており、航空機が気団と気団の間を穿っているときに乱気流が発生する可能性があります。
上空の航空機雲の形状を観察することも非常に重要です。航空機雲が形成された後、長時間その形状に大きな変化がない場合は、その高度の気流は安定しており、飛行も非常に安定しています。一方、航空機雲の形状がすぐに変形したり散らばったりする場合は、その高度では乱気流が発生する可能性が高いです。

航空路上に積乱雲が現れ、回避措置を講じる必要がある場合、レーダー管制下ではしばしば新しい針路を申請します。ND(ナビゲーション・ディスプレイ)で積乱雲の位置を確認できるため、例えばパイロットは磁方位250度へ進めば積乱雲を回避できると判断すれば、ATCを通じて管制官に以下のように申請します。 「ABC Air 37、Request heading 250 due to cloud(積乱雲のため針路250を要求)」。 管制官がこの申請に同意した場合、しばしば「ABC Air 37、Flying heading 250、report clear of weather(針路250で飛行せよ、天候を抜けたら報告せよ)」と回答し、パイロットに回避完了後に再度状況を報告するよう求めます。したがって、パイロットは航空路を変更した後、前方に積乱雲が存在しないことを確認すると、管制官に「ABC Air 37、Clear of weather(天候を抜けた)」と報告します。回避を完了し、右へ旋回して元の航空路に戻る準備ができれば、「ABC Air 37、Accept right turn(右旋回可能)」と報告し、管制にいつでも旋回できる準備ができていることを伝えると、管制官はパイロットに新しい方位角またはウェイポイント情報を指示します。
航空機が大洋の上空を飛行している場合や、レーダー管制のないエリアにいる場合、パイロットは航空路からどれくらい離れるかという方法で回避ルートを申請することができます。例えば、「ABC Air 37、request deviate 10 miles right of track(現航路の右側10マイルに逸動することを要求)」という具合です。管制官は「ABC Air 37、10 miles deviation right of track approved(現航路右側10マイルの逸動を許可する)」のように回答して、パイロットの要求を承認します。
— 老堪不知道β-HMX是啥 (@candyshadow) July 19, 2017
2.7 離陸許可の節で、現代の旅客機は空中衝突防止装置TCAS(Traffic Alert and Collision Avoidance System)を装備していることを紹介しましたが、パイロットはTCASを通じて自分の周囲を飛行する航空機や高度を確認することができます。大多数の航空機の飛行高度は一般的に比較的安定した高度ですので、これらのデータを参考にすることも巡航高度を判断する良い方法です。
-
旅客機の操縦探検4.7 気象と乱気流について
飛行機に乗ったことがある人なら、誰もが空での揺れを経験しているでしょうが、決して快適なものではありません。 このセクションでは、気象と乱気流に関する知識を専門的に紹介します。
一般的に、飛行機が悪天候の空域を通過する際、機体は軽微から激しい振動を受け、重症の場合は座席に座っている乗客を弾き飛ばすほどになります。運が悪ければ、乗客の骨折や負傷、機体の損傷さえ起こり得ます。たとえそこまでの負傷に至らなくても、長時間の揺れは体調不良を引き起こし、多くの場合、乗客に心理的な不安を与えます。 そのため、パイロットは任務遂行中、常に悪天候の空域を回避し、乗客に安全で快適な旅を提供できるよう留意しています。 もちろん、飛行機の構造的な強度は揺れに十分耐え得るため、飛行安全上の問題はありません。
乱気流には一般的にいくつかの状況があります。一つずつ見ていきましょう。
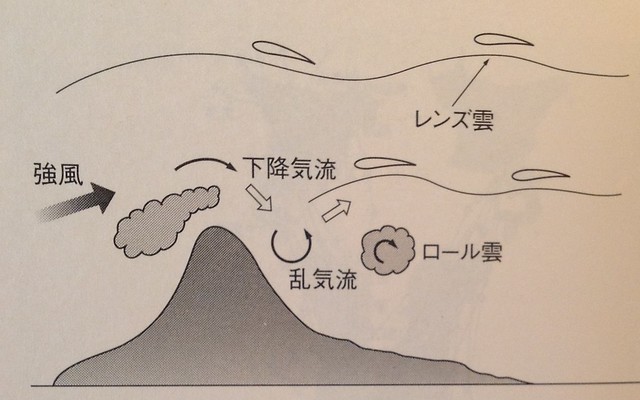
まずは**山岳波(Lee wave)**です。山脈の風下側の上空で形成される空気の波動、つまり乱気流を山岳波と呼びます。静力学安定条件下において、空気が山岳を越えて移動し風下斜面に達した際、個々の空気塊が平衡位置を離れて浮力振動を行うと、山岳の風下斜面に内部重力波が形成されます。その形成は、大気の層構造、風向風速、山の大きさや勾配などの条件に関係します。風速が大きく、かつ山稜に直交する場合、気流は強く撹乱され山岳波が形成されやすくなり、山が高く斜面が急であるほど、山岳波の振幅は増大します。山岳波が形成されると、山稜に平行で、無雲域と交互に現れるレンズ雲や波状雲が見られることがよくあります。
日本の富士山は山岳波が頻発する典型的な場所であり、かつて富士山の山岳波の影響で英国海外航空911号便の墜落事故が発生しました。登録記号G-APFEのボーイング707型機は、当時日本の羽田空港を離陸し、香港へのフライトを継続する準備をしていましたが、離陸直後に乱気流に巻き込まれ、機体強度の限界を超えて空中分解し、富士山麓に墜落、乗員乗客全113名と乗員11名の全員が犠牲になりました。
山岳波の危険性を知っているため、航空会社は航路準備段階で、富士山の例のように発生源を回避するため、山頂の北側または南側を通過するなどの措置をとります。
次に注意すべきは対流圏界面です。 対流圏と成層圏の間の遷移層で、その厚さは数百メートルから1〜2キロメートル、高度は緯度や季節によって大きく変化します。一般的に、熱帯は極地より高く、夏は冬より高く、昼間は夜間より高くなります。対流圏界面は、ある種の分水嶺のようなものです。その上側は成層圏で、晴れ渡り気流は安定しており、高度とともに温度は上昇します。その下側は対流圏で、雲や雨、雷など変化に富み、高度とともに温度は低下します。一般に、空気の特性として、温度の高い空気は上層にあり安定しており、温度の低い空気は下層にあり不安定となります。したがって、成層圏は安定し、対流圏は不安定です。対流圏界面は対流圏と成層圏の間にあり、上下の気象状況を示しています。
対流圏の雲は、一般的に対流圏界面まで上昇すると止まるため、積乱雲のちぎれ雲(かなとこ雲)の頂上は、対流圏界面の高度と一致することがよくあります。積乱雲は飛行に大きな危害をもたらしますが、対流圏界面の高度を知ることで、積乱雲の雲頂が現れる可能性のある高度を概ね判断でき、飛行時にそれを回避できます。
対流圏界面の高度変化、いわゆる対流圏界面の傾きは、対流圏の天気とも密接に関係しています。暖気団の上にある対流圏界面は一般に高く、寒気団の上にある対流圏界面は一般に低くなります。対流圏界面の高度が急激に変化したり、不連続になったりすることは、下層のある高度にジェット気流や乱気流が存在することを示唆しています。飛行機がこれらの領域を横断する際、大きな影響を受ける可能性があります。
一つの実例を見てみましょう。下図のGAVELウェイポイント地点では、対流圏界面高度が35400フィートまで低下しています。この時の巡航高度が36000フィートである場合、西経140度付近の飛行では特に注意が必要です。
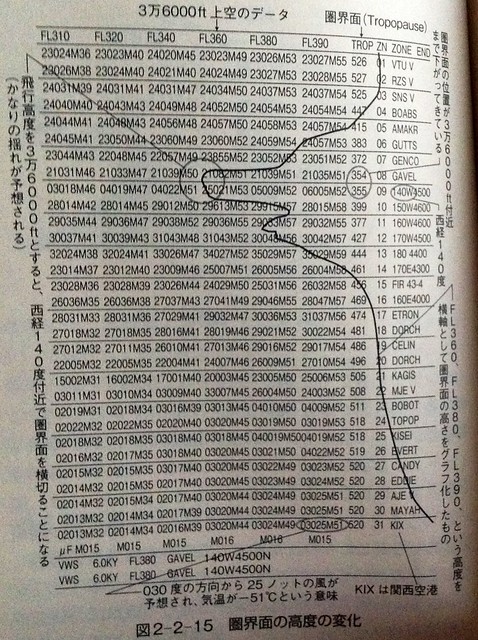
角度を変えてこのデータを見てみましょう。
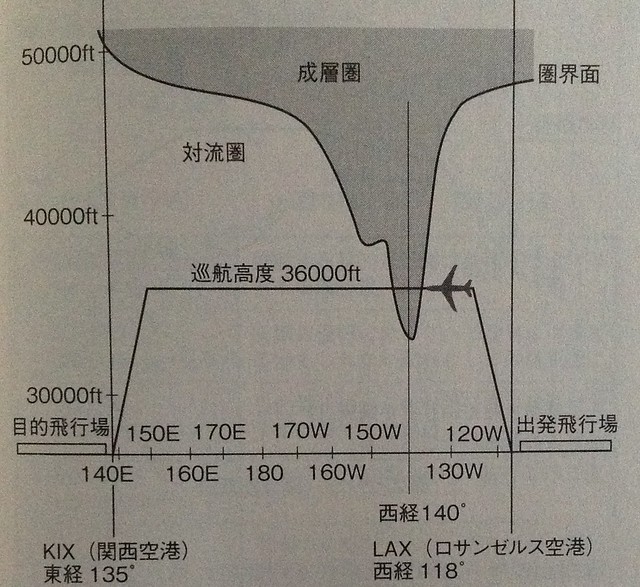 巡航高度と対流圏界面高度の関係図を見ると比較的分かりやすく、対流圏界面の勾配の大きさが一目瞭然です。
ロサンゼルス国際空港を離陸し、36000フィートの巡航高度で西へ向かうと、西経140度付近で対流圏界面を通過することになります。
巡航高度と対流圏界面高度の関係図を見ると比較的分かりやすく、対流圏界面の勾配の大きさが一目瞭然です。
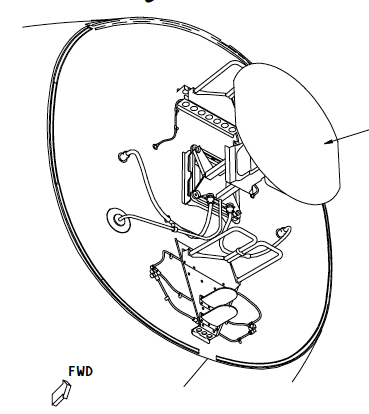
ロサンゼルス国際空港を離陸し、36000フィートの巡航高度で西へ向かうと、西経140度付近で対流圏界面を通過することになります。次に機上レーダーについて紹介します。 現代の旅客機には気象レーダーが搭載されており、パイロットに航路上およびその周辺空域の気象情報を提供します。下図のように、機上気象レーダーのアンテナは機首のレドーム内にあります。
 アンテナから放射された電磁波が障害物に当たって反射して戻ってくる原理を利用しており、ターゲットの導電率が高く、反射面が大きいほど、反射波(エコー)は強くなります。
レーダーは、飛行機前方の航路上にある気象ターゲットやその他のターゲットの存在および分布状況を探知し、探知したターゲットの輪郭、雷雨エリアの強度、方位、距離などをディスプレイに表示します。
アンテナから放射された電磁波が障害物に当たって反射して戻ってくる原理を利用しており、ターゲットの導電率が高く、反射面が大きいほど、反射波(エコー)は強くなります。
レーダーは、飛行機前方の航路上にある気象ターゲットやその他のターゲットの存在および分布状況を探知し、探知したターゲットの輪郭、雷雨エリアの強度、方位、距離などをディスプレイに表示します。
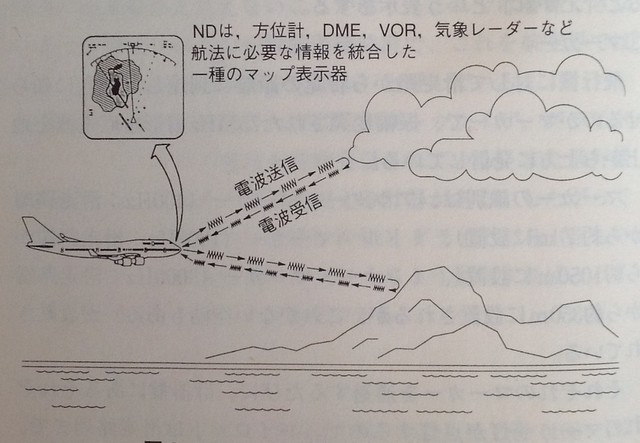
一般的にND(ナビゲーションディスプレイ)では、異なる色で様々な気象条件が表示されます。例えば、赤いエリアは降水量が12mm/h以上、黄色いエリアは4〜12mm/h、緑は1〜4mm/hを示し、紫は不安定な気流があることを示します。
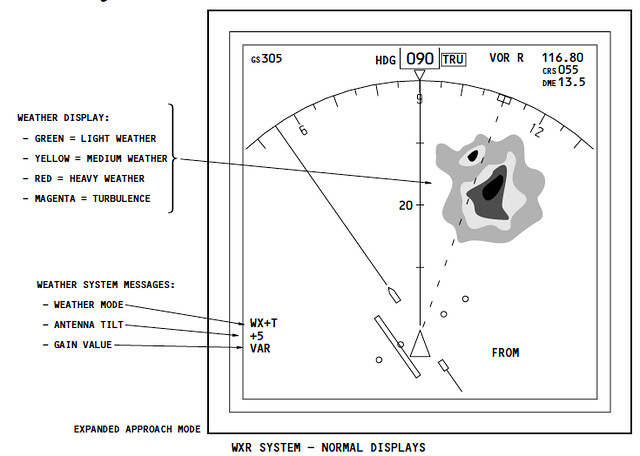
 パイロットは、航路前方の空域に黄色、赤、紫色を発見した場合、一般的に回避措置を講じることを検討します。
パイロットは、航路前方の空域に黄色、赤、紫色を発見した場合、一般的に回避措置を講じることを検討します。
上記で紹介した状況は事前に察知できるため、パイロットは任務中にこれらの空域を迂回できますが、事前の兆候がなく、雲のない状態でレーダーでも探知できず、突然発生する乱気流、つまり**CAT(Clear Air Turbulence:晴空乱気流)**も存在します。
晴空乱気流は、ジェット気流の急速な発達に伴う低気圧の北東側で発生しやすいです。
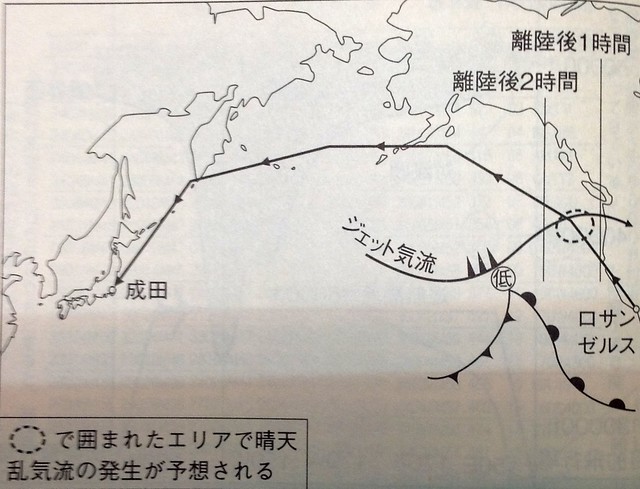 例えば上図では、晴空乱気流が発生する可能性のある領域が破線で描かれています。ロサンゼルスから離陸して約1時間半後にこの空域を通過する予想ですが、航路上では回避できないため、この空域を通過する際、パイロットはシートベルトの着用灯を点灯させ、機内食の提供時間もこの期間を避けるようにして、乗客と客室乗務員の安全を確保します。
例えば上図では、晴空乱気流が発生する可能性のある領域が破線で描かれています。ロサンゼルスから離陸して約1時間半後にこの空域を通過する予想ですが、航路上では回避できないため、この空域を通過する際、パイロットはシートベルトの着用灯を点灯させ、機内食の提供時間もこの期間を避けるようにして、乗客と客室乗務員の安全を確保します。最後に、パイロットが航路を変更する際の操作について紹介します。まず機長と副操縦士が新しい航路を調査します。例えば、本来の航路ポイントがA、B、C、Dの4つだったとします。B点付近で乱気流が発生したため、B点を避け、数十キロ離れたE点を通過することにしたとします。しかし、この変更には空管の許可が必要です。空管はパイロットからの申請を受けると、同じ高度のE点を通過する他の便がないか確認する必要があるため、正式な許可が下りるまでには時間がかかります。一方、飛行機自体は時速約900キロで高速飛行しており、許可が下りた時にはすでにA点を大きく過ぎていた場合、E点へ向かうために急角度での急旋回が必要になるかもしれません。これはジェットコースターのような飛行であり、乗客にとって快適な体験ではありません。パイロットは注意を怠らず、常にレーダーの表示を監視し、必要な時には早めに許可を得て、速やかにFMC(フライトマネジメントコンピュータ)に新しい航路情報を入力する必要があります。
様々な上空の気象情報を得るためには、同じ空域を飛行する他の便のパイロットとの通信も非常に重要です。パイロットは特別な周波数である123.45MHzを使用します。これは国籍や航空会社を問わず、パイロット同士が通話するための専用周波数です。例えば、同じ方向へ飛行する数機の飛行機のうち、先頭の機が乱気流に遭遇した場合、そのパイロットはこの周波数を使って後続の機に注意を喚起します。すると、後続機のパイロットは事前にシートベルト着用灯を点灯させ、乗客に揺れを注意喚起するため、飛行の安全性が高まります。
また、この周波数は乱気流だけでなく、その他の緊急時にも利用可能です。例えば、ある機内で乗客が急病になり、その飛行機に医師がいない場合、パイロットはこの周波数を使って他の飛行機に呼びかけ、もし医師がいれば患者の緊急医療を頼むことができます。
Prev: 关于燃油消耗和重心 TOC: 目录 Next: 关于气象和颠簸(续)
完