旅客機操縦の探秘6.7 着陸操作
機体はグライドスロープに沿って降下を続け、パイロットは自動飛行操縦システム(AFDS)の状態を引き続き監視します。 無線高度計(RA)が500フィートに達したとき、副操縦士が現在の数値を読み上げます: 「500、Vref+5、Sink700」。
ここでの「500」とは、AFE(空港標高以上、Above Field Elevation)500フィートを指します。 人口密集地帯以外での最低安全高度(Minimum Safe Altitudes)は500フィートと規定されているため、 この500フィートという高度は非常に重要な指標となります。 「Vref+5」は、現在の速度がちょうどフラップ30度时的な基準速度より5ノット速いことを指します。 Vrefの設定については、5.2 アプローチ・ブリーフィングの節で説明しました。 「Sink 700」は、現在の垂直方向の降下率が700フィート/分であることを意味します。 AFE高度1000フィート以下では、降下率を1000フィート/分以下にすることが規定されており、 現在の700という数値は問題ありません。
400フィートの高度に達すると、機体の水平尾翼のトリムが自動的に後ろへ回転し始めます。 機体の高度やピッチ姿勢は依然として変わりませんが、 自動飛行システムはすでに着陸前のフレア(引き起こし)の準備を始めています。
続いて機体は決断高度(DA)に近づき、副操縦士が「Approaching Minimum(最低高度付近)」とコールし、
機長は「Checked(確認)」と応答します。
直後に機体が決断高度に達すると、副操縦士は「Minimum(最低高度)」とコールします。
この時、視程に問題がなければ、機長は「Landing(着陸)」とコールし、
機体が着陸後の滑走手順を継続することを示します。
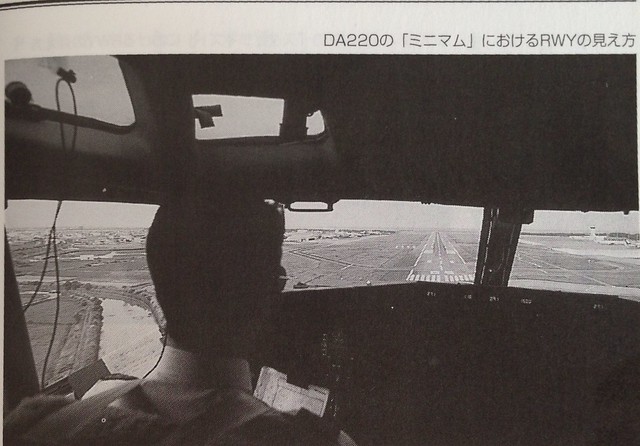 上の写真は、DA220の高度からコックピットを見た滑走路の様子です。
上の写真は、DA220の高度からコックピットを見た滑走路の様子です。
もしパイロットが決断高度で滑走路を視認できない場合、機長は「Go Around(ゴーアラウンド)」とコールし、 乗員は前のセクションで紹介したゴーアラウンド手順を直ちに実行しなければなりません。
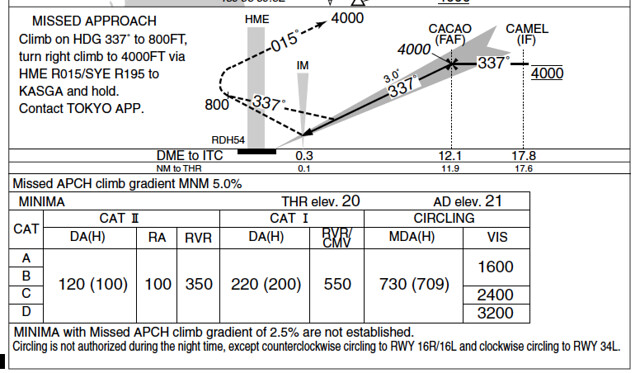 上の写真の東京国際空港(羽田)34L滑走路のILSアプローチを例にすると、
カテゴリーⅠの基準は、決断高度(DA)が220フィート以上、滑走路視距離(RVR)が550フィート以上です。
カテゴリーⅡの基準は、決断高度(DA)が120フィート以上、滑走路視距離(RVR)が350フィート以上です。
カテゴリーⅡの運航を行うには、滑走路、航空会社、機体がカテゴリーⅠよりも高い整備能力と厳格な要件を満たす必要があり、
同時にパイロットも相应的な資格を持っている必要があります。
上の写真の東京国際空港(羽田)34L滑走路のILSアプローチを例にすると、
カテゴリーⅠの基準は、決断高度(DA)が220フィート以上、滑走路視距離(RVR)が550フィート以上です。
カテゴリーⅡの基準は、決断高度(DA)が120フィート以上、滑走路視距離(RVR)が350フィート以上です。
カテゴリーⅡの運航を行うには、滑走路、航空会社、機体がカテゴリーⅠよりも高い整備能力と厳格な要件を満たす必要があり、
同時にパイロットも相应的な資格を持っている必要があります。
着陸滑走の手順に従い、一般的にはパイロットはオートパイロットを解除し、手動で機体を操縦しますが、 具体的にどの高度から、どの段階で行うべきかについて、特別な標準はないようで、 多くの場合はパイロット自身の好みや習慣に委ねられています。 私の手元の資料にはこう紹介されています(ボーイング737-500を例にすると)、 DAから50フィートを引いた高度、つまり東京国際空港の例では170フィートより前に、 パイロットはオートスロットルとオートパイロットを解除し、自ら着陸操作を行う必要があります。
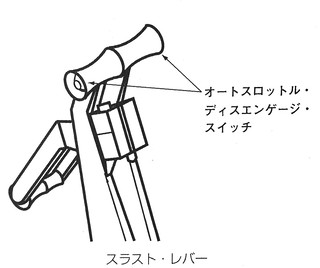 上の図:スロットルレバーとオートスロットル解除スイッチの位置
上の図:スロットルレバーとオートスロットル解除スイッチの位置
 上の図左上の矢印のボタン:オートパイロット解除スイッチ(Autopilot Disengage)
上の図左上の矢印のボタン:オートパイロット解除スイッチ(Autopilot Disengage)
無線高度(RA)が100フィートに達すると、無線高度計と連動した地上接近警報システム(GPWS, Ground Proximity Warning System)が 自動的に電子警告音を発し、現在の高度を継続して報告します: “One Hundred” “Fifty” “Forty” “Thirty” “Twenty” “Ten”
機体が滑走路端(Runway Threshold)を通過する時の高度はRA50フィートであるべきで、 それまでは3度の降下角度を維持します。 50フィートを過ぎると、フレア操作が開始され、機体の降下率は徐々に低下します。 機体のフレア(引き起こし)は、脚が地上15フィートの高さになった時点で始まり、 機体のピッチ姿勢が機首上げ3度に達します。これにより、機体が接地(Touch Down)時に 目標となる150フィート/分の降下率を実現できます。 同時に、パイロットはフレアと同時にエンジン推力を滑らかに絞り、 接地の瞬間にちょうどアイドル状態になるようにします。
小型プロペラ機の運転经验があるパイロットは、 15フィートの高さからフレアを開始してピッチを3度にし、その後に推力を減らすのでは、 地面効果によって機体が浮き上がって(バルーニング)しまうのではないか、と疑問に思うかもしれません。 小型機の着陸では、一般的に先に推力を絞り、 パイロットが機体が沈み始めと感じてからフレアを行う操作が必要だからです。 しかし、旅客機の場合は小型機よりもはるかに質量が大きいため、慣性も非常に大きくなります。 もし小型機と同じ操縦方法を採用すれば、間違いなく地面に強く衝突してしまい、 いわゆる「ハードランディング(Hard Landing)」となります。
そのため、旅客機パイロットは上述の
- 滑走路上空15フィートでフレア
- ピッチ姿勢を3度機首上げにする
- スロットルレバーをアイドルにする という3つのステップを実践すれば、基本的に安全な着陸が可能です。 もちろん、ここでは机上の空論ですが、口で言うのは簡単で、実際の操縦ははるかに困難です。 大量の厳しい訓練と実際の飛行经验の研鑽がなければ、完璧な着陸を実現することは絶対に不可能です。
主脚が接地すると、タイヤと地面の摩擦音が聞こえ、
機体も滑走路との接触によってわずかに揺れます。
機長は操縦輪を軽く前方に押し、前輪を滑走路に着地させた後、
ラダーペダルを左右に踏み、機体が滑走路の中心線に沿って滑走するように制御します。
 タイヤが接地時に地面と激しく衝突し、大量の摩擦熱が発生してタイヤ表面が消耗するため、
着陸の瞬間には脚の下から青い煙が立ち上るのが often 見られ、
同時に滑走路にはタイヤが焼かれた後の長い黒い痕が残ります。
(上の写真は大阪関西国際空港で撮影されたものです)
タイヤが接地時に地面と激しく衝突し、大量の摩擦熱が発生してタイヤ表面が消耗するため、
着陸の瞬間には脚の下から青い煙が立ち上るのが often 見られ、
同時に滑走路にはタイヤが焼かれた後の長い黒い痕が残ります。
(上の写真は大阪関西国際空港で撮影されたものです)
主脚が接地した後、左右のタイヤのどれか2つでも回転を始めると、
スポイラー・レバー(Speedbrake Lever)が自動的に後方へUPの位置に移動します。
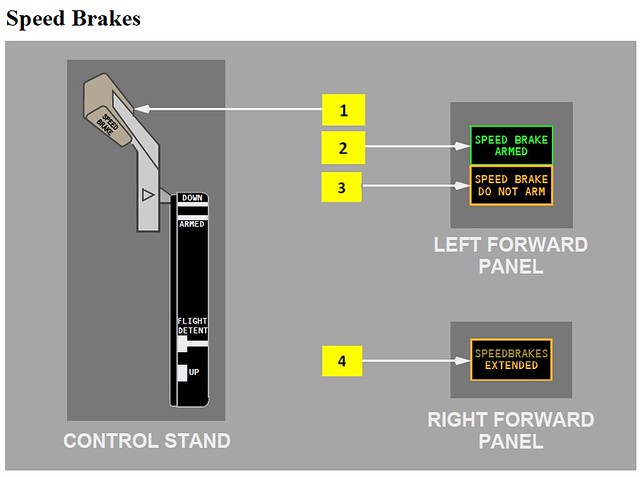

それと同時に、主翼の胴体側に近い減速板(スポイラー、Flight Spoilers、下の図の10番の場所)が自動的に展開されます。
 続いて機体の重量がタイヤにかかり、脚の伸縮ストラットに取り付けられた空中地上安全センサー(Air Ground Safety Sensor)が
オレオ・ストラット(Oleo Strut)の伸縮状態に基づいて地上状態であると判断すると、
システムは自動的に主翼の胴体外側に近い減速板(グランドスポイラー、上の図の9番の場所)を開きます。
減速板は空気抗力を増大させ、機体の速度と揚力を低減する効果があります。
ボーイング777の減速板(北京首都国際空港で撮影):
続いて機体の重量がタイヤにかかり、脚の伸縮ストラットに取り付けられた空中地上安全センサー(Air Ground Safety Sensor)が
オレオ・ストラット(Oleo Strut)の伸縮状態に基づいて地上状態であると判断すると、
システムは自動的に主翼の胴体外側に近い減速板(グランドスポイラー、上の図の9番の場所)を開きます。
減速板は空気抗力を増大させ、機体の速度と揚力を低減する効果があります。
ボーイング777の減速板(北京首都国際空港で撮影):
 エアバスA320の減速板(東京羽田国際空港で撮影):
エアバスA320の減速板(東京羽田国際空港で撮影):
 上の写真からは、この時フラップが35度の位置に下がっていることも確認できます。
上の写真からは、この時フラップが35度の位置に下がっていることも確認できます。
もし機体が接地した後にゴーアラウンドが必要な異常事態が発生した場合、エンジンのスロットルレバーが前方に押されると、 スポイラー・レバーは自動的にDown位置に移動するため、減速板は格納され、ゴーアラウンドに影響を与えることはありません。
続いて機体のオートブレーキが作動し始めます。アプローチ・ブリーフィングで事前に設定した段階に基づき、 主車輪のブレーキドラムが摩擦力を利用して車輪の回転速度を下げ、ブレーキの役割を果たします。 注意すべき点是、もしパイロットが誤ってラダーペダルのブレーキを踏んでしまうと、オートブレーキは直ちに作動しなくなります。
パイロットはスポイラー・レバーがUP(展開)位置にあること、およびオートブレーキが正常に作動していることを確認した後、 エンジンの逆推力(リバース)を使用することができます。 逆推力の目的は、機体の速度を低下させ、滑走距離を短縮し、ブレーキコンポーネントの摩耗を減らし、 滑走路上の滞留時間を短縮することです。 したがって、もし滑走路の距離が十分に長く、天候が良く、交通量も少ない場合は、逆推力は必須ではありません。
逆推力(推力逆転、Reverse Thrust)という言葉は、誤解を招きやすい言葉です。
字面上から理解すると、エンジンが逆回転して空気を後方から前方に排出し、減速する機能のように思えます。
実際には、噴射气流を前方に偏向させることで減速の目的を達成しています。
ジェットエンジンの設計上、逆回転は不可能であるため、推力反転装置を使用して排気を前方に偏向させる必要があります。
ターボファンエンジンで推力反転装置を開いている時、原則としてエンジンはまだ前方へ推力を出していますが、
ターボファンエンジンの推力の大部分はファン(バイパス空気)から来ており、特に高バイパス比のジェットエンジンでは、
約70%の推力がファン由来であるため、逆向きの气流による抗力がタービンの推力を上回り、減速の目的が達成されます。

乗客は機体が着陸した後、エンジンの音が再び大きくなるのを聞くことができますが、この音がエンジン逆推力の音です。
次に、エンジンが逆推力を開いている時の写真を見てみましょう。
 この写真は名古屋中部国際空港で撮影されたもので、機体はキャセイパシフィック航空のエアバスA340、
エンジン型式はCFM56-5C4で、ペタル型の推力反転装置を搭載しています。
逆推力装置が作動すると、デフレクター(導流翼)が開き、ダクトを通る空気を外部に転向させて、逆推力を発生させます。
この写真は名古屋中部国際空港で撮影されたもので、機体はキャセイパシフィック航空のエアバスA340、
エンジン型式はCFM56-5C4で、ペタル型の推力反転装置を搭載しています。
逆推力装置が作動すると、デフレクター(導流翼)が開き、ダクトを通る空気を外部に転向させて、逆推力を発生させます。
次に、異なる形状の逆推力を見てみましょう。
これは広島空港で撮影したボーイング737-800で、
エンジン型式はCFM56-7B24、バケツ型(ターゲット型)の推力反転装置です。
逆推力装置が作動すると、スリーブが後方へスライドし、ダクトを通る空気を外部に転向させて、逆推力を発生させます。

逆推力レバーはスロットルレバーの前方にあり、外見はスロットルレバーとほぼ同じですが、サイズは一回り小さいです。
<a href=“https://yinlei.org/x-plane10/2013/09/21/Pic_1.JPG" 使用する際は、逆推力レバーをインターロック位置まで持ち上げて少し保持し、インターロックが解除されるのを待ちます。その後、必要に応じて逆推力を使用します。
使用する際は、逆推力レバーをインターロック位置まで持ち上げて少し保持し、インターロックが解除されるのを待ちます。その後、必要に応じて逆推力を使用します。
{kind=link}
機体の速度が60ノットに減速すると、副操縦士が「60 knots」とコールするので、機長は逆推力レバーを下げ始め、 速度がタクシー速度に達する前に、レバーを滑らかに逆推力アイドル位置まで戻します。 エンジンが逆推力アイドルに達した後、逆推力レバーを完全に下ろします。
その後、タクシー速度になる前(10ノット以下)に、ラダーペダルの前方のブレーキを軽く踏んでオートブレーキのプリセットを解除し、 その後は必要に応じて手動ブレーキを使用して機体の滑走速度を制御します。 オートブレーキの解除は、言うのは簡単ですが、実際には非常に難しい操作です。 タイミングと力の加減を非常に熟練して掌握する必要があり、強く踏みすぎると、機体が急ブレーキをかけたように乗客をパニックさせたり怪我をさせたりする可能性があり、 逆に軽く踏みすぎるとオートブレーキが解除できず、機体がオートブレーキシステムによって強くロックされ、滑走路上に停止してしまうことになります。 これらの状況は極力避けるべきです。
完
>Prev: 復飛 TOC: 目次 >Next: 着陸後手順
2017/10/14 壓力與責任的承擔にあるA320の説明を抜粋します。
「エアバス機は通常モード(Normal Law)での着陸モード(Land Mode)において、パイロットのために自動トリミング(Auto-Trim)を行わなくなります」とウォレス氏は言います。「これは初心者が混乱しやすい点でもあります」。上昇、巡航、降下の過程では、フライトコンピュータはパイロットのために自動トリミングを行い、操縦をより簡単で省力にすることができますが、機体が降下して50フィートの高度を通過する時、フライトコンピュータは着陸モードに切り替わり、自動トリミングを停止するだけでなく、30フィートの高度を通過した後、水平安定舵を強制的に下方向に回転させます。これにより機首が下がり、パイロットがすべきことは操縦桿を後ろに引いて機首が下がる力を打ち消し、機体の操縦感覚を従来の機体と同じにすることです。「操縦のテクニックは従来の機体と同じです」とウォレス氏は説明します。「この時、機体は完全にパイロットの手に委ねられ、フライトコンピュータはもはや補助を行いません」。したがって、平漂(フレア)の段階で、もしタイミングが早すぎて機体が空中に浮いてしまった場合は、すべきことは操縦桿を緩めるか少し戻すことです。機体はすでに水平安定面が下がる動作をしているため、機首は自然と下がるからです。もし操縦桿をさらに前に押すと、機体の降下率が大きくなりすぎ、低高度では非常に危険です。なぜなら、降下率を減らすために、操縦桿をより大きく後ろに引く必要があるからです。
エアバス機は初心者が飛ばすのに最も適していません。これはフライ・バイ・ワイヤの機体であり、パイロットはサイドスティックから機体の真の反応を得ることができないため、計器スキャンの速度が非常に重要になるからです。特に風が強い時、機体はしばしば風に流されます。もし計器スキャンの速度が速くないと、修正に間に合わなくなります。「機体が偏ってから修正しようとしても、往々にして遅すぎます」とウォレス氏は説明します。「フライ・バイ・ワイヤの機体は反応に少し時間がかかり、電子信号が油圧システムに伝達され、その後で操縦翼面が動くからです」。伝統的な小型機のように、ケーブルで操縦翼面を引くわけではなく、即座に修正効果を得ることができるわけではありません。
初心者パイロットの計器スキャンの速度は比較的遅く、修正が遅れると、機体が常に異常なグライドスロープに留まることになり、機体の高度が上下したり、左右に逸脱したりして、不安定なアプローチを引き起こしやすくなります。あるいは、低高度で正常なグライドスロープに戻ろうとして過大な降下率で修正したり、硬着陸を恐れるあまり、逆に平漂が早すぎて、機体を低空で停滞させ、降下率をゼロにし、速度が落ちて運動エネルギーが減少した後、自由落下のように落ちてしまうことになります。
「A good landing comes from a good approach!(良い着陸は良いアプローチから生まれる)」とウォレス氏は言います。「これはあるベテラン機長から教わった飛行の極意です」。この言葉はまったくその通りです。一般の乗客は着陸の瞬間、主脚が滑走路に接触する力だけでパイロットの技術を判断しますが、コックピットにずっと座っているパイロットだけが、フライト全体が本当に良いアプローチであったかどうかを知ることができます。