Exploration du cockpit d'un avion de ligne 5.5 Début de la descente
Dans la section 5.3, lors du résumé des procédures d’approche aux instruments standards, il a été mentionné qu’en se basant sur les informations d’altitude et de position du waypoint initial de l’approche, et en référant à l’heure estimée d’arrivée, au taux de consommation de carburant, aux performances du moteur, ainsi qu’à la force et à la direction du vent, le pilote peut définir les paramètres moteur et le taux de Descente.
Par exemple, la procédure d’arrivée KAIHO commence au waypoint ADDUM situé dans l’océan Pacifique, avec une altitude minimale de route de 10 000 pieds. Pour pouvoir descendre de l’altitude de croisière à ADDUM, le calculateur de gestion de vol (FMS) détermine que l’avion doit commencer à Descendre à partir d’un point situé à 200 kilomètres à l’ouest d’ADDUM.
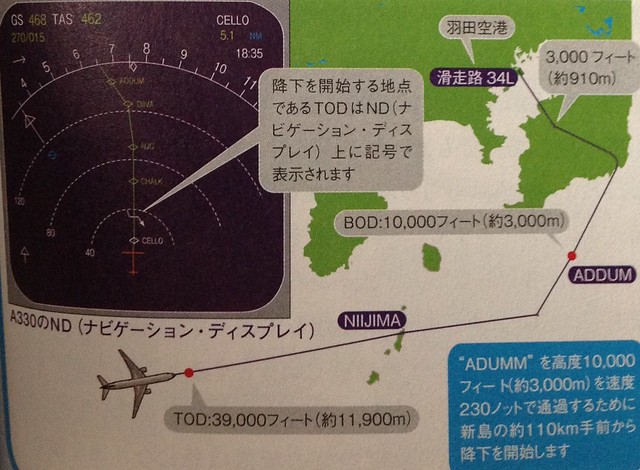 Généralement, ce point est appelé le Top of Descent (point de descente), abrégé en TOD ou T/D, et son affichage est visible sur le ND en mode carte. Sur la photo ci-dessus d’un Airbus 330, il est représenté par une ligne brisée fléchée, situé entre les points de repère CELLO et CHALK. De plus, le point initial de l’approche est appelé Bottom of Descent, abrégé en BOD.
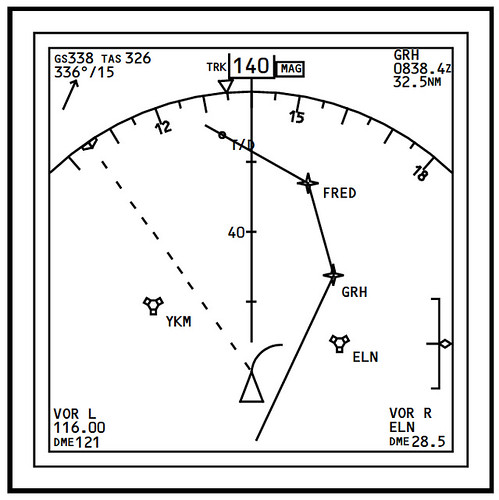
Par exemple, sur le ND d’un Boeing 777, l’emplacement du T/D est directement indiqué par un point sur la route.
Généralement, ce point est appelé le Top of Descent (point de descente), abrégé en TOD ou T/D, et son affichage est visible sur le ND en mode carte. Sur la photo ci-dessus d’un Airbus 330, il est représenté par une ligne brisée fléchée, situé entre les points de repère CELLO et CHALK. De plus, le point initial de l’approche est appelé Bottom of Descent, abrégé en BOD.
Par exemple, sur le ND d’un Boeing 777, l’emplacement du T/D est directement indiqué par un point sur la route.
Après avoir passé le TOD, l’avion commence automatiquement à Descendre. Le schéma ci-dessous illustre l’ensemble du vol. (Ce graphique explique principalement le mode de réglage de la manette des gaz automatique lors de chaque phase de vol, mais il convient également pour expliquer l’ensemble du processus de vol, c’est pourquoi je l’emprunte ici.)
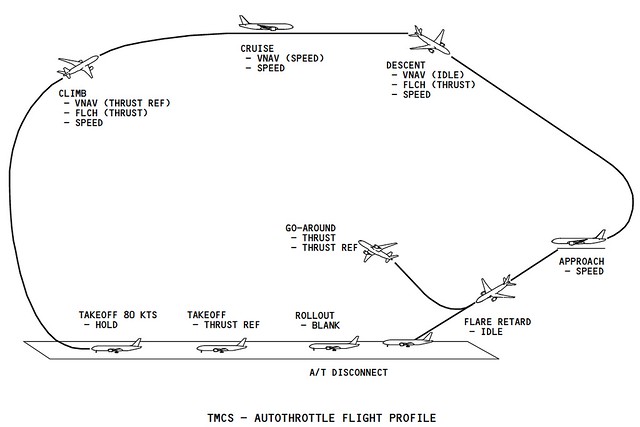
Concernant le processus de Descente, un point essentiel à connaître est que l’avion ne réduit pas son altitude en abaissant les gouvernes de profondeur, c’est-à-dire en baisant le nez ; c’est par la manette des gaz que l’on contrôle la pente de Descente de l’avion.
Lorsque l’avion passe du Vol en palier à l’état de Descente, le pilote réduit légèrement les gaz, ce qui fait baisser la vitesse de l’avion. Selon la relation proportionnelle entre la Portance et la vitesse, une diminution de la vitesse entraîne une diminution de la Portance ; celle-ci devenant inférieure à la Gravité, l’avion commence alors à Descendre. Lors de la Descente, la trajectoire de vol n’est plus horizontale, mais inclinée vers le bas d’un certain angle. À ce moment, l’incidence de l’aile n’a pas changé, mais la direction de déplacement de l’avion a changé : au lieu d’aller tout droit devant, elle va légèrement vers le bas. Par conséquent, l’angle d’attaque de l’aile augmente, ce qui augmente la Portance. Cette Portance supplémentaire générée par l’angle d’attaque équilibre la composante supplémentaire de la Gravité, et toutes les forces externes de l’avion retrouvent leur équilibre, entrant dans un état de Descente à vitesse constante.
Lors de la Descente, le nez de l’avion est incliné vers le bas. Cette attitude requiert très peu de Poussée, et souvent l’avion peut même complètement réduire les gaz et Planer. Les passagers ont probablement remarqué que l’avion devient très silencieux au début de la Descente. On peut comparer l’attitude de l’avion en Descente à une voiture descendant une côte : il n’est pas nécessaire d’appuyer sur l’accélérateur pour que la voiture Descende de manière stable. Plus la pente est forte, plus la vitesse est élevée ; plus la pente est faible, plus la vitesse est relativement lente. Le calculateur de gestion de vol des avions modernes peut ajuster automatiquement et de manière optimale les gaz et l’attitude en fonction des exigences du pilote.
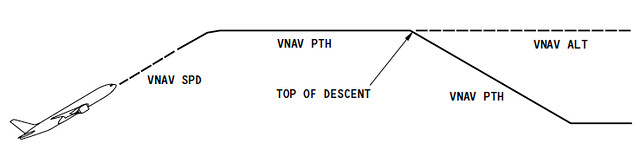
En général, le pilote peut définir deux modes de Descente : maintenir une vitesse constante ou maintenir une pente constante. Cela correspond aux réglages d’assiette du FMC, permettant d’utiliser le mode VNAV SPD (mode vitesse de navigation verticale) ou le mode VNAV PTH (mode trajectoire de navigation verticale).
Lors d’une Descente VNAV SPD, le système de manette des gaz automatique maintient généralement le régime de ralenti, tandis que le système de pilotage automatique (AFDS) contrôle et maintient la vitesse cible sur le FMC.
Lors d’une Descente VNAV PTH, le calculateur de gestion de vol (FMC) contrôle généralement l’avion pour maintenir une pente de Descente de 3 degrés ; la vitesse entre le TOD et le BOD est alors contrôlée automatiquement par l’ordinateur. Par exemple, si l’avion est dévié vers le haut par rapport à la pente de 3 degrés sous l’effet du vent, le FMC augmentera la vitesse pour maintenir l’avion sur la pente initiale.
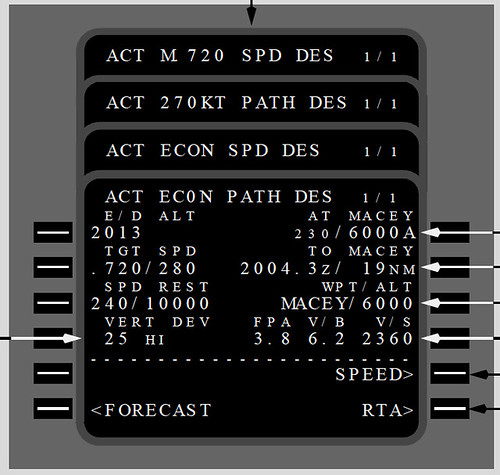 L'image ci-dessus montre l'écran CDU d'un Boeing 737, également en mode VNAV PTH. Au début de la Descente, le mode passe automatiquement de ACT ECON CRZ (croisière économique active) à ACT ECON PATH DES (descente sur trajectoire économique active). La ligne 2L indique la valeur de vitesse actuelle de Mach 0,72 / 280 nœuds, et la ligne 3L affiche la limite de vitesse. Comme la réglementation de l'industrie impose une limitation de vitesse à 250 nœuds en dessous de 10 000 pieds, pour ne pas dépasser cette limite, la limitation de vitesse est spécifiquement réglée à 240 nœuds.
L'image ci-dessus montre l'écran CDU d'un Boeing 737, également en mode VNAV PTH. Au début de la Descente, le mode passe automatiquement de ACT ECON CRZ (croisière économique active) à ACT ECON PATH DES (descente sur trajectoire économique active). La ligne 2L indique la valeur de vitesse actuelle de Mach 0,72 / 280 nœuds, et la ligne 3L affiche la limite de vitesse. Comme la réglementation de l'industrie impose une limitation de vitesse à 250 nœuds en dessous de 10 000 pieds, pour ne pas dépasser cette limite, la limitation de vitesse est spécifiquement réglée à 240 nœuds.
Pourquoi adopte-t-on généralement une pente de 3 degrés pour Descendre ? C’est parce que 3 degrés est l’angle le plus adapté pour le calcul mental de la relation entre l’altitude et la distance de Descente. On peut facilement l’estimer avec cette formule approximative : Distance de Descente requise (milles marins) = Altitude de vol (pieds) / 1000 * 3
Par exemple, pour atterrir depuis une altitude de croisière de 33 000 pieds, le calcul altitude de vol / 1000 * 3 donne un résultat de 99 milles marins (environ 190 kilomètres). Par conséquent, pour que l’avion Descende de 33 000 pieds, soit une altitude de 10 kilomètres, il est nécessaire de commencer la Descente au moins à 190 kilomètres de l’aéroport de Destination.