Título 6.1: Manipulación durante la aproximación con guía de radar
在 la sección 5.6 se resumieron los diálogos cuando los controladores aéreos realizan la guía por radar; a continuación, se resumirán las operaciones específicas del piloto durante el proceso de aproximación y arrival.
Cuando el control emite una instrucción de Rumbo, como “Air System 115, Turn Left Heading 040”, se solicita a la aeronave que gire a la izquierda para poner el Rumbo a un ángulo de 40 grados. El piloto ajustará el botón de HEADING en el Panel de Control de Modo MCP (Mode Control Panel) (consulte el diagrama del MCP del Boeing 737 a continuación),  girando el selector para fijar los datos en la pantalla a 040. Luego presiona el interruptor HDG SEL ubicado debajo del botón. En este momento, el modo del sistema de anuncio de modo de vuelo FMA (Flight Mode Annunciation) cambiará, pasando de la navegación horizontal LNAV al modo de Selección de Rumbo HDG SEL.
girando el selector para fijar los datos en la pantalla a 040. Luego presiona el interruptor HDG SEL ubicado debajo del botón. En este momento, el modo del sistema de anuncio de modo de vuelo FMA (Flight Mode Annunciation) cambiará, pasando de la navegación horizontal LNAV al modo de Selección de Rumbo HDG SEL.
Este cambio se puede ver en el diagrama de transición de estado del indicador de modo de vuelo FMA (Flight Mode Annunciation) de la siguiente imagen, 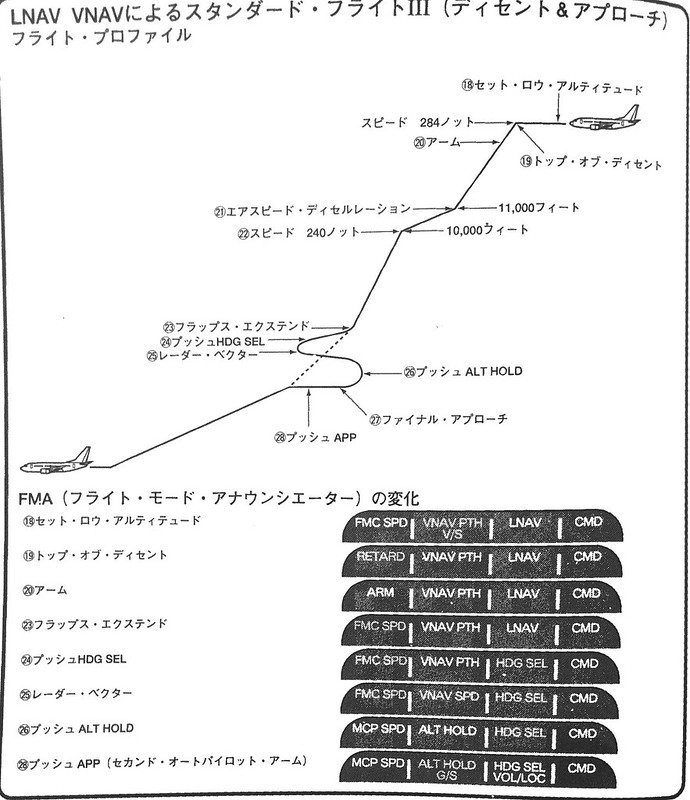 en el estado de vuelo 23, al presionar HDG SEL, el control horizontal pasa al estado de Selección de Rumbo (24), por lo tanto, el control del rumbo ya no depende de la computadora de gestión de vuelo, sino que es gestionado manualmente por el piloto.
en el estado de vuelo 23, al presionar HDG SEL, el control horizontal pasa al estado de Selección de Rumbo (24), por lo tanto, el control del rumbo ya no depende de la computadora de gestión de vuelo, sino que es gestionado manualmente por el piloto.
Sin embargo, hay que tener en cuenta que el MCP solo gestiona la dirección de vuelo de la aeronave; la acción de Giro específica depende de la computadora para el ajuste automático de las superficies de control. Por lo general, un Giro estándar requiere que la aeronave realice un alabeo de 30 grados (no se trata solo de mover el timón de dirección en la cola vertical), utilizando la diferencia de Portancia generada por los alerones izquierdo y derecho para inclinar el fuselaje hacia la izquierda o derecha y lograr el giro. Por ejemplo, para Girar a la izquierda, el alerón izquierdo se levanta y el alerón derecho se baja; como resultado, la Portancia generada por el ala derecha aumenta, mientras que la Portancia del lado izquierdo disminuye. El desequilibrio de Portancia entre los dos lados hace que el fuselaje de la aeronave se incline hacia la izquierda y comience a Girar hacia la izquierda. 
Cuando la dirección del morro se acerca gradualmente al Rumbo deseado, la computadora ajustará los alerones para reducir gradualmente el ángulo de inclinación, hasta que al llegar al Rumbo 040 (dirección Noreste) la aeronave alcance exactamente el estado de Vuelo nivelado.
Dado que ha comenzado la guía por radar, el piloto también comienza a desactivar el modo de navegación vertical de altitud VNAV e inicia el modo de control de altitud manual. Por ejemplo, si la aeronave está actualmente en Vuelo nivelado a una altura de 4000 pies, el piloto presiona el interruptor ALT HLD debajo del botón ALTITUDE para mantener la altura actual de la aeronave. En consecuencia, el indicador de modo de vuelo FMA también comienza a cambiar: el modo de aceleración automática pasa de FMC SPD a MCP SPD, y el modo de paso pasa de VNAV ALT a modo ALT HOLD. Este cambio se muestra en los elementos 25 y 26 del diagrama de transición de estado FMA anterior. De esta manera, el control de altitud de la aeronave también se separa del FMC y pasa a ser controlado directamente por el piloto en el MCP.
Después de que el modo de aceleración automática pasa de FMC SPD a MCP SPD, el indicador de velocidad IAS/MACH en el MCP, que no se había mostrado antes, se ilumina y se muestra la velocidad actual del aire de la aeronave. Si no se realiza ningún ajuste, la computadora ajustará automáticamente el acelerador para mantener esta velocidad y continuar el vuelo. El piloto ajustará la velocidad según los requisitos del procedimiento estándar de llegada por instrumentos y el procedimiento estándar de aproximación por instrumentos, desplegará los flaps según sea necesario y controlará que la velocidad del aire no supere la velocidad de maniobra de los flaps limitada por la resistencia estructural de la aeronave.
Según las regulaciones del manual, la velocidad de maniobra de los flaps se basa en la velocidad de referencia VREF mencionada en la sección 5.7, varía con el peso y sigue el plan de flaps a continuación para garantizar que la velocidad de la aeronave no caiga por debajo de la velocidad de Pérdida.
Tomando el Boeing 737 como ejemplo, se utiliza la velocidad de maniobra de los flaps en la posición de flap 40 para VREF: Velocidad de maniobra de los flaps en la posición de flap 1: VREF + 50 knots Velocidad de maniobra de los flaps en la posición de flap 5: VREF + 30 knots Velocidad de maniobra de los flaps en la posición de flap 10: VREF + 30 knots Velocidad de maniobra de los flaps en la posición de flap 15: VREF + 20 knots Velocidad de maniobra de los flaps en la posición de flap 25: VREF + 10 knots Velocidad de maniobra de los flaps en la posición de flap 30: VREF30 Velocidad de maniobra de los flaps en la posición de flap 40: VREF40
Supongamos que un vuelo Boeing 737-500 está en el estado de flap 1 y la velocidad de maniobra es de 190 nudos; el piloto girará el botón debajo del indicador de velocidad para configurar el valor mostrado en 190.
Cuando el control emite una instrucción de altitud, como “Air System 115, Descent and Maintain 3000”, se solicita a la aeronave que Descienda a una altura de 3000 pies. Por lo tanto, el piloto ajustará nuevamente el botón ALTITUDE, ajustará la altura a 3000 pies y presionará el interruptor de ajuste de altura LVL CHG en el selector de modo. La computadora ajustará nuevamente el acelerador automático: el modo de acelerador del FMA cambia de MCP SPD a RETARD (reducir), el acelerador se reduce a la posición de ralentí, el morro se inclina hacia abajo para comenzar el Descenso. Al mismo tiempo, el modo de control de paso cambia de ALT HOLD a MCP SPD, por lo tanto, la computadora controla el ángulo de paso para mantener la aeronave continuando el vuelo a una velocidad de 190 nudos.
Cuando la altura está a 100 pies del valor objetivo, el control de paso del FMA cambia de MCP SPD a ALT ACQ y continúa el Descenso; al alcanzar la altura objetivo, el acelerador automático se empuja hacia adelante automáticamente para mantener la altura de la aeronave a 3000 pies, por lo que el control de paso del FMA cambia nuevamente, de ALT ACQ a ALT HOLD, es decir, el estado de mantenimiento de altitud.
Respecto a la altura, hay un punto más: cuando la aeronave desciende por debajo de los 2500 pies, el altímetro de radio a bordo se activa automáticamente y sus datos se muestran en la parte inferior central de la PFD. El altímetro de radio es un equipo de radio a bordo que mide la altura real de la aeronave sobre el suelo según el principio de reflexión de ondas de radio.
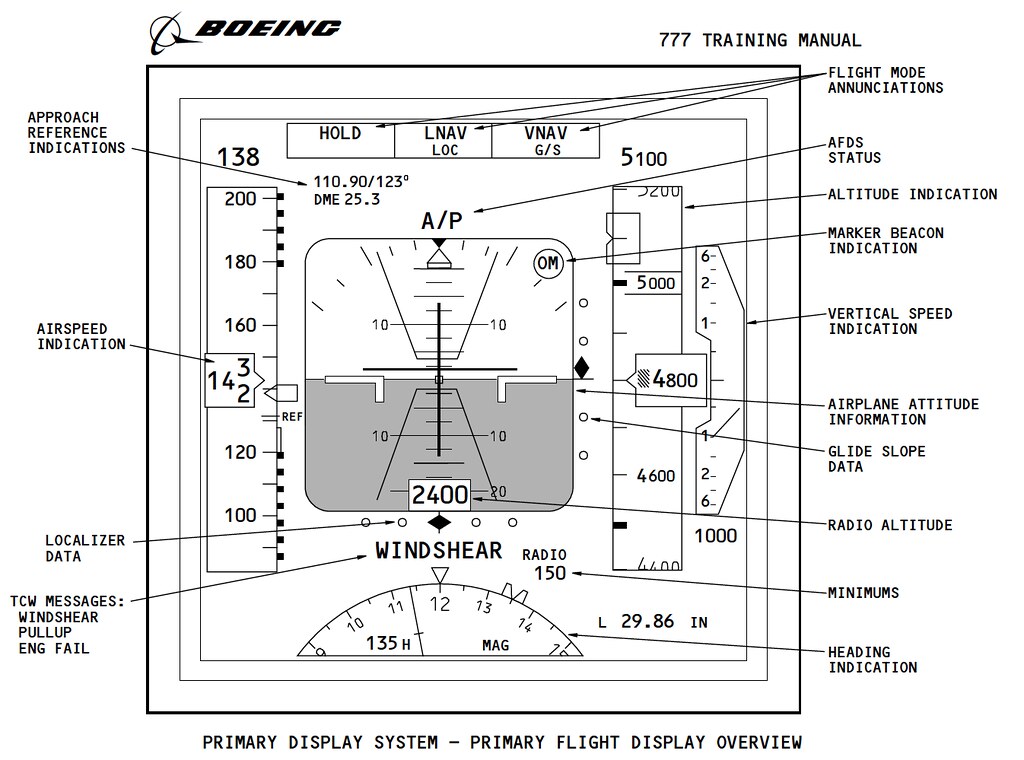 Consulte la explicación en el manual de entrenamiento del Boeing 777 en la imagen de arriba, la flecha en **RADIO ALTITUDE** apunta a la pantalla del altímetro de radio a 2400 pies.
Consulte la explicación en el manual de entrenamiento del Boeing 777 en la imagen de arriba, la flecha en **RADIO ALTITUDE** apunta a la pantalla del altímetro de radio a 2400 pies.
La aeronave comienza gradualmente a acercarse al punto de referencia de aproximación final FAF, y el piloto comienza a prepararse para el aterrizaje por instrumentos ILS.
Fin
Prev: Resumen de operaciones de descenso TOC: Tabla de contenidos Next: Sistemas de ayuda al aterrizaje Fin