Secretos de la cabina de aviones de pasajeros 3.6 Transferencia del ATC al control de salida, entrada en modo VNAV
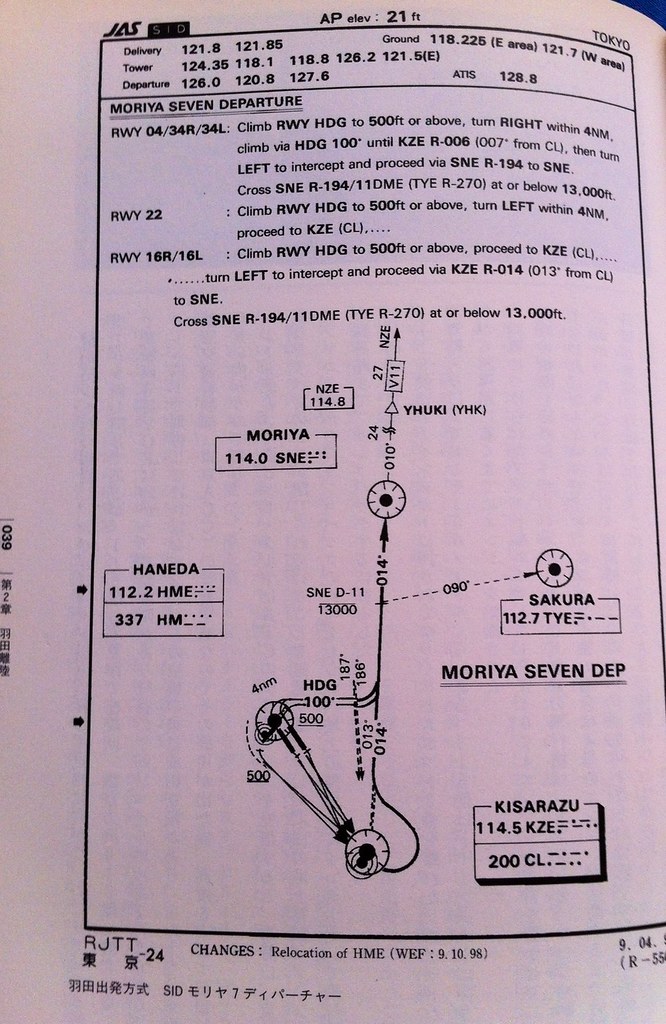
Basándose en el ejemplo del vuelo AirSystem115, la aeronave siguió el procedimiento de salida Moriya 7 del aeropuerto de Haneda. Primero voló en la dirección de la pista (16R) hasta el punto de navegación KZE (KISARAZU) en la esquina inferior derecha del mapa, y luego inclinó automáticamente 30 grados a la izquierda, girando hacia una dirección de 14 grados (básicamente cerca del Norte verdadero) para volar hacia el punto de navegación SNE (MORIYA).
En este momento, después de que el controlador de Torre confirmó que la salida de la aeronave era correcta, instruyó al piloto para que contactara con el Control de Salida: “Air System 115, Contact Departure” Lo que significa “Air System 115, contacte con el Control de Salida de Tokio” El copiloto repitió “Departure, Air System 115” Es decir “Contacto con el Control de Salida de Tokio, Air System 115” Después, ajustó la frecuencia de la radio a 120.800 MHz del Control de Salida y contactó: “Tokyo Departure, Air System 115, Leaving 1800” Significa “Control de Salida de Tokio, aquí Air System 115, dejando 1800 pies” El controlador respondió “Air System 115, Tokyo Departure, Rader Contact, Turn Left Heading 020, Vector to Moriya, Climb and Maintain 210” Lo que quiere decir “Air System 115, aquí Control de Salida de Tokio, contacto radar, giro a la izquierda rumbo 020, vectorización a Moriya, ascienda y mantenga 21000 pies” El copiloto repitió: “Left 020, Direct 210, Air System 115” Es decir “Giro izquierda rumbo 020, mantenga 21000 pies, Air System 115”.
Según el procedimiento estándar de salida anterior, sabemos que hay una restricción de altitud a 11 millas delante de MORIYA, es decir, se debe volar por debajo de la altitud de 13000 pies (unos 3300 metros). Sin embargo, aquí el controlador de salida permitió a los pilotos omitir el punto de ruta KZE, girar directamente hacia MORIYA y ascender directamente a 21000 pies, quizás debido al poco tráfico ese día. Para la aerolínea, esto ahorra tiempo y combustible, lo cual es excelente. Por lo tanto, el piloto giró el selector de rumbo en el MCP a 020.
Ahora la velocidad de la aeronave está en modo MCP SPD, por lo que el piloto necesita aumentar la indicación de velocidad continuamente y retraer los flaps que se desplegaron.
Por ejemplo, tomando el 737-500 mencionado anteriormente, si los flaps están a 5 grados en el despegue, el piloto puede primero retraerlos a 1 grado, Flap1.
La condición de velocidad para Flap1 es V2 + 15 nudos o más, y ahora la velocidad de ascenso ya ha alcanzado V2 + 20 nudos, por lo que no hay problema en retraerlos a 1 grado.
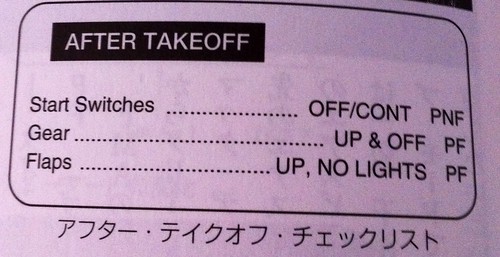
Al mismo tiempo, el procedimiento posterior al despegue también comienza a ejecutarse: el interruptor de freno automático se gira de RTO a OFF,
 la palanca del tren de aterrizaje también se mueve a la posición OFF en el centro (de arriba a abajo son UP/OFF/ON), y los interruptores de arranque del motor también se ajustan de CONT a OFF.
La velocidad sigue aumentando, por lo que no hay problema en retraer completamente los flaps. La velocidad de maniobra de los flaps del 737-500 en estado UP es de 210 nudos. Alrededor de los 190 nudos, el comandante indica al copiloto Flap UP, de modo que los flaps de borde de ataque y de fuga se retraen completamente en el ala, y la aeronave queda en el estado de menor resistencia aerodinámica.
la palanca del tren de aterrizaje también se mueve a la posición OFF en el centro (de arriba a abajo son UP/OFF/ON), y los interruptores de arranque del motor también se ajustan de CONT a OFF.
La velocidad sigue aumentando, por lo que no hay problema en retraer completamente los flaps. La velocidad de maniobra de los flaps del 737-500 en estado UP es de 210 nudos. Alrededor de los 190 nudos, el comandante indica al copiloto Flap UP, de modo que los flaps de borde de ataque y de fuga se retraen completamente en el ala, y la aeronave queda en el estado de menor resistencia aerodinámica.
El comandante vuelve a aumentar la velocidad a 250 nudos en el MCP e indica al copiloto la lista de verificación posterior al despegue,
 apagar los interruptores de arranque del motor, retraer el tren de aterrizaje y retraer los flaps.
apagar los interruptores de arranque del motor, retraer el tren de aterrizaje y retraer los flaps.
Una vez completada la verificación, el comandante procede a iniciar el modo VNAV. VNAV es la abreviatura de Navegación Vertical (Vertical Navigation), y la computadora de gestión de vuelo (FMC) calcula las velocidades verticales de ascenso, crucero nivelado y descenso de la aeronave basándose en la velocidad económica óptima (ECON SPD) de la aeronave, mostrándolas en el Director de Vuelo (FD). La velocidad económica óptima se refiere a la velocidad de vuelo más económica en la relación entre el tiempo de vuelo y el consumo de combustible. Generalmente, cuanto más alta es la velocidad, más corto es el tiempo de vuelo pero mayor el consumo de combustible; si la velocidad es más baja, el consumo de combustible es mejor pero el tiempo de vuelo es más largo. La computadora puede calcular, a partir de varias combinaciones de valores de velocidad y consumo de combustible, la velocidad que ahorra combustible y tiempo por unidad de tiempo, y usa esta velocidad para realizar el ascenso, crucero y descenso. Los motores de los aviones de reacción modernos son potentes y la tasa de ascenso generalmente alcanza los 700-800 metros/minuto, por lo que para una altitud de crucero objetivo de 10000 metros, solo se necesitan unos 15 minutos desde el despegue.

Al presionar la tecla VNAV, la configuración de paso en la barra de modo en la parte superior izquierda del PFD cambia de MCP SPD a VNAV SPD en verde, y el modo de vuelo entra en la etapa 11 que se muestra en la figura de abajo.
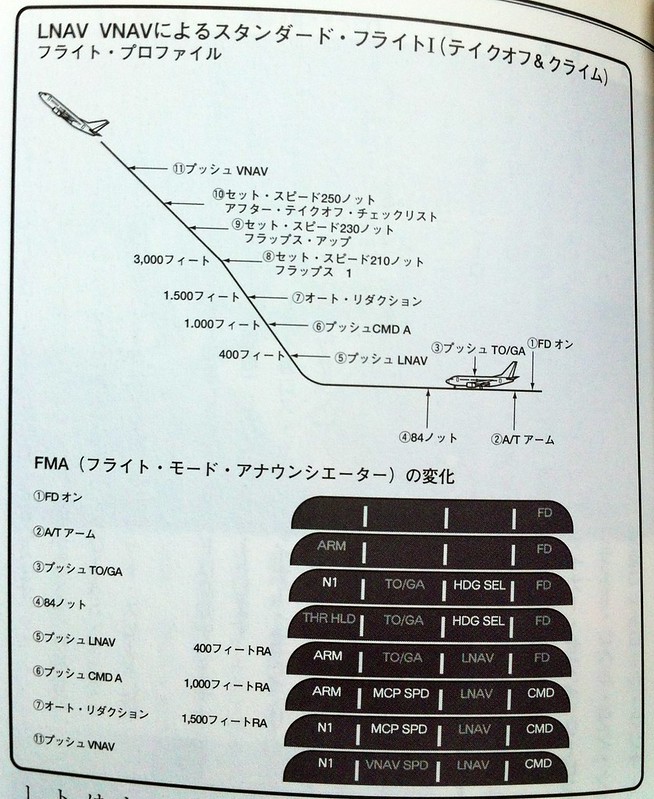 En este momento, los números en IAS/MACH del MCP también desaparecen, y la velocidad de la aeronave entra completamente en la etapa de control y gestión de la FMC.
En este momento, los números en IAS/MACH del MCP también desaparecen, y la velocidad de la aeronave entra completamente en la etapa de control y gestión de la FMC.
Si por alguna razón, por ejemplo, el control de tráfico aéreo requiere ajustes de separación entre aeronaves y solicita al piloto ajustar la velocidad del avión, se puede presionar la tecla de Intervención de Velocidad (SPD INTV) debajo de la tecla VNAV, de modo que incluso en el estado VNAV, ISA/MACH puede ser activado, permitiendo al piloto ingresar una velocidad temporal para que la aeronave vuele a la velocidad especificada por ISA/MACH.
Una vez completado el ajuste de velocidad temporal, el piloto puede presionar nuevamente la tecla SPD INTV, la visualización de ISA/MACH desaparece, y la velocidad de la aeronave vuelve a ser controlada por la computadora de gestión de vuelo (FMC).
Prev: Activar piloto automático TOC: Tabla de contenidos Next: ATC transferido al centro, continuación del ascenso
Fin