航空知识笔记
-
复习一下飞行计算尺E6-B
台风天,在家里无事,于是拿出多年没用的飞行计算尺E6-B复习一下。

很多功能想不起来怎么用了,于是在谷歌speadsheet上整理了一下,看看是不是容易理解呢?

功能 计算内容 外圈刻度 外圈箭头 转盘箭头 转盘刻度 1 时间速度以及飞行时间和距离的关系 距离 564海里 - RATE指向外圈刻度 速度 125节 时间 4.5小时 2 燃油消耗 燃油量 64gal - RATE指向外圈刻度 燃油消耗率 8.4gal/h 飞行时间 7小时37分 3 爬升率 爬升率 450ft/min - RATE指向外圈刻度 速度 90节 每海里爬升高度 300ft 4 单位换算单位换算 海里-英里-公里 - NAUT
STAT
KM- 海里 10
英里 11.5
公里 18.55 单位换算 美加仑-英加仑 - U.S. GAL
IMP. GAL- 美加仑 20
英加仑 16.66 单位换算 重量-容积燃油重量 192磅 FUEL LBS. U.S. GAL 美加仑 32 7 滑油重量 90磅 OIL LBS. U.S. GAL 美加仑 12 8 单位换算 磅-千克 2000磅 LBS KG 901千克 9 单位换算 升-加仑 50升 LITERS U.S. GAL 13.2加仑 10 单位换算 英尺-米 985英尺 FT METERS 300米 11 单位换算 1马赫的真空速 真空速 660Knot - PRESSURE ALTITUDE指向MACH NO INDEX,例如15摄氏度 1马赫,固定为10 12 空速修正 根据表速/大气温度/压力高度计算真空速/密度高度
(高度表的气压基准值调整到2992)TAS真空速 183节 - 右侧AIR TEMPERATURE -15度
右侧PRESSURE ALTITUDE 10K
DENSITY ALTITUDE 15KIAS表速 145节 13 高度修正 计算机场真实高度MSL
※外界空气温度低于标准大气温度(15.0℃)时,高度表所指高度会高于实际高度
1. 气压基准值调整到2992得到压力高度QNE
2. 气压基准值调整到机场QNH得到修正海压高度
3. 修正海压高度 - 机场标高 = AGL校准前高度差
4. MSL = AGL校准后高度差 + 机场标高AGL校准后高度差 6600ft - 左侧AIR TEMPERATURE -19度
左侧PRESSURE ALTITUDE 10KAGL校准前高度差 7000ft 14 航迹修正 航迹修正量计算
1. 根据已经飞行海里和现在偏航距离计算偏航度数
2. 根据剩余航程海里和现在偏航距离计算偏离角
3. 修正量 = 偏航度数 + 偏离角 = 3.8 + 2.4 = 6.2度1 偏航距离 8海里
2 偏航距离 8海里- 1 RATE指向偏航度数 3.8
2 RATE指向偏离角 2.41 飞行海里 125
2 剩余航程海里 235 -
看一下卫星通信中的ACARS
十年前的老文章 漫谈个人接受ACARS信号的方法 里介绍过接收VHF的ACARS信号, 卫星通信(SATCOM)中的ACARS又是什么样,稍微查了一下资料。
首先看马来西亚航空MH377失联事件的Wikipedia页面, 与卫星通信的信息如下:
飞行时间01:30 Inmarsat-3 F1卫星接收到七个握手信号中的第一个 飞行时间07:30 Inmarsat-3 F1卫星捕捉到飞机ACARS发出的最后一次完整握手信号,代表此时还在飞行 飞行时间07:38 计划外,透过飞机发出的无法解释的"部分握手"信号,在作业程序中须预留的抵达后余存燃油应所剩无几 飞行时间08:34 Inmarsat预定下次握手时间未收到飞机答复
Inmarsat即国际海事卫星组织, 同样可以通过Wikipedia看到Inmarsat提供的卫星服务:
 Inmarsat-3 F1卫星的涵盖范围为印度洋地区, 发射日期为1996年4月3日,已经在太空中运行了28年。
Inmarsat-3 F1卫星的涵盖范围为印度洋地区, 发射日期为1996年4月3日,已经在太空中运行了28年。网上找到不错的资料,那么下面把各种ACARS的各种通讯方式总结一下, 通信媒体, 调制方式, 传输速度, 传输数据单位, 纠错功能有无,访问方式以及协议做成表格供参考。
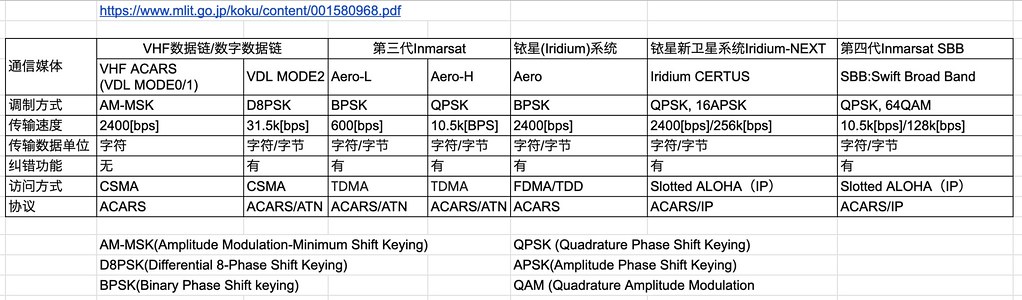 另外估计基于 IP 的飞机通信寻址与报告系统(ACARS OVER IP)今后将会是主流了吧。
另外估计基于 IP 的飞机通信寻址与报告系统(ACARS OVER IP)今后将会是主流了吧。另外根据satbeams.com上的资料可以知道十年前检测到马航失联客机信号的第三代Inmarsat卫星Inmarsat-3 F1已经退役,
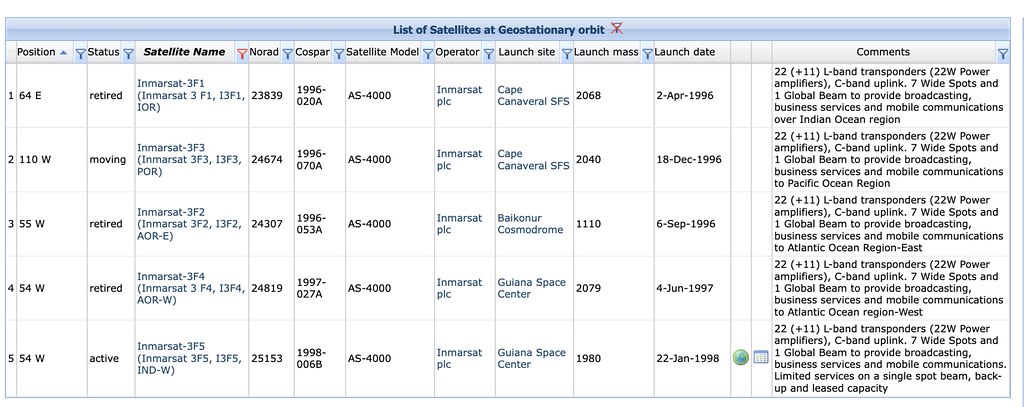 Inmarsat-3F5, Inmarsat-4F1, Inmarsat-4F2, Inmarsat-4F3等正在提供工作。
Inmarsat-3F5, Inmarsat-4F1, Inmarsat-4F2, Inmarsat-4F3等正在提供工作。

作为业余爱好者如何接受卫星信号呢? 现在手头没有卫星天线,也没有L波段的接收机,所以就不实践了,只查一下资料而已吧。
关于频率,看UFH-Satcom网站上的资料, 这里能找到不少的信息, 比如覆盖印度洋的Inmarsat-3 F1如下:
 现在覆盖亚太地区的Inmarsat-4 F1如下:
现在覆盖亚太地区的Inmarsat-4 F1如下:

Inmarsat-4 F1的运行轨迹可以在N2YO上找到。

网上有不少爱好者接受卫星信号的介绍,下面给出几个链接。 今后有时间和精力的话,自己也许会弄一下吧。
- 1550MHz Active Inmarsat Antenna Bundle - Includes SAWbird+ iO LNA & Filter Module, High Gain (3.5dBi) 1550MHz Patch Antenna, SMA DC Block, Cables & Adapters
- Basic's to decoding Inmarsat L-Band signals using the RSP SDR
- Exploring L Band with SDRuno
- JAERO A program to demodulate and decode Classic Aero SatCom ACARS signals
- Inmarsat Aero
- How To Decode L band Satellite ACARS and CPDLC messages with JAERO and your SDR
- 收集ACARS数据的爱好者团体Airframes
- FEEDING ACARS DATA TO AIRFRAMES.IO
- satnogs的Inmarsat-4 F1 Observation
其他链接
-
全日空的航行前地面绕机检查介绍视频
8年前在博客上介绍过客机驾驶探秘 1.5 航行前地面检查, 自认为对这个过程还算比较了解的。 不过今天发现全日空网站上推出一个新系列–
STAY HOMEの中、パイロットとして何かできないか、と考えた自主企画の動画「青いつばさの世界 〜おうちで航空教室〜」。 第一弾で機体の外部点検編をお届けします。
看玩之后还是发现一些新的学习点。
全日空的飞行员因为COVID-19疫情期间飞行任务减少, 所以企划了这么一个航空知识普及目的的地面教学系列。 系列第一篇就是详细的介绍了绕机检查时机体各个部位以及航空设备的介绍, 内容虽然是日文,但确实非常实用,推荐一下。
话说本次疫情对世界的航空产业会产生巨大影响, 这个效果可能要持续多年。 比如2001年的911恐怖事件之后,3-4发客机纷纷退役,新型2发客机成为越洋航运的主导。
COVID-19传染症对商务私人旅行的打击可能会随着治疗药物和预防疫苗的普及而减轻, 但在家工作将会成为今后的主要工作方式之一, 出差,商务会议,年会,产品发布等商业行为估计将会逐渐采用远程方式, 航空产业也将随之调整其商业模式吧。 虽然暂时自己还不能清晰的描述出对将来的预测, 但是商务舱利用减少,航空公司也许不得不提高经济舱价格, 随之海外旅游的成本也会提高不少吧。
20200514 更新 全日空的飞行员又介绍了他们的飞行包, 虽然内容跟很久以前写的 客机驾驶探秘 1.2 飞行员的箱子里装的都是什么东西? 差不太多,不过内容还是很推荐的。
-
ZBAD大兴国际机场航图
aipchina上公开了ZBAD大兴国际机场航图,马上找到看了看, 并放到本站中国航图-大兴机场页里,供大家参考。

从图中可以看到大兴机场共有4条跑道, 南北方向的17R/35L, 17L/35R,以及19R/01L, 东西方向的11L/29R。 跑道长度除了19R/01L是3400米以外,其他3条跑道都是3800米。 跑道宽度除了17R/35L是45米,其他都是60米。 可以从图中左侧看到还有一条在建设中的跑道,不知道编号为多少。
另外还可以看到跑道道面等级序号(PCN数)为90, 在网上查了下主要飞机的ACN数字资料, 90这个数字的话可以说只有不是最大重量等例外情况, 基本是没有什么问题的。
下面看看进近图,包括了北风时的: RNAV ILS/DME RWY01L RNAV CAT-II/III ILS/DME RWY01L RNAV ILS/DME RWY35L RNAV CAT-II ILS/DME RWY35L RNAV ILS/DME RWY35R 南风时的: RNAV ILS/DME z RWY17L 西侧进入 RNAV ILS/DME y RWY17L 东侧进入 RNAV ILS/DME z RWY17R 西侧进入 RNAV ILS/DME y RWY17R 东侧进入 RNAV ILS/DME RWY19R 以及西风时的: RNAV ILS/DME RWY29R 看起来11L的降落是没有的了。
注意看01L和35L具备了2类盲降系统,尤其是01L具备了3类CAT III B盲降! 以前只知道国内浦东机场具有三类盲降CAT III A, 某次坐飞机时特地拍了张照片纪念,
 大兴比浦东又进了一步,今后有机会去也一定要拍一下这个CAT III B。
大兴比浦东又进了一步,今后有机会去也一定要拍一下这个CAT III B。 -
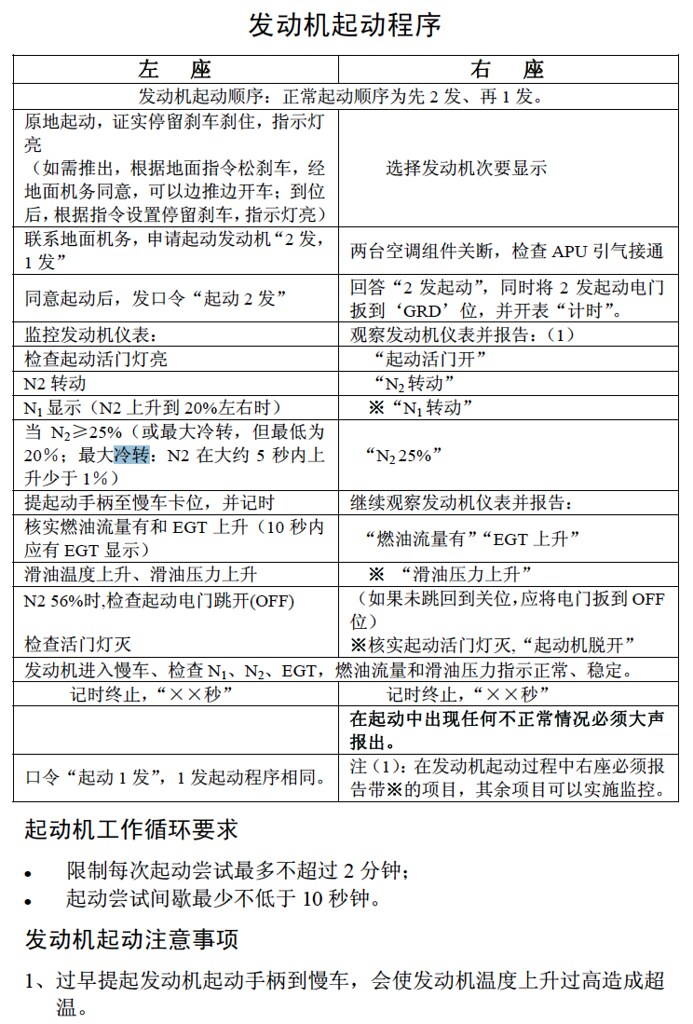
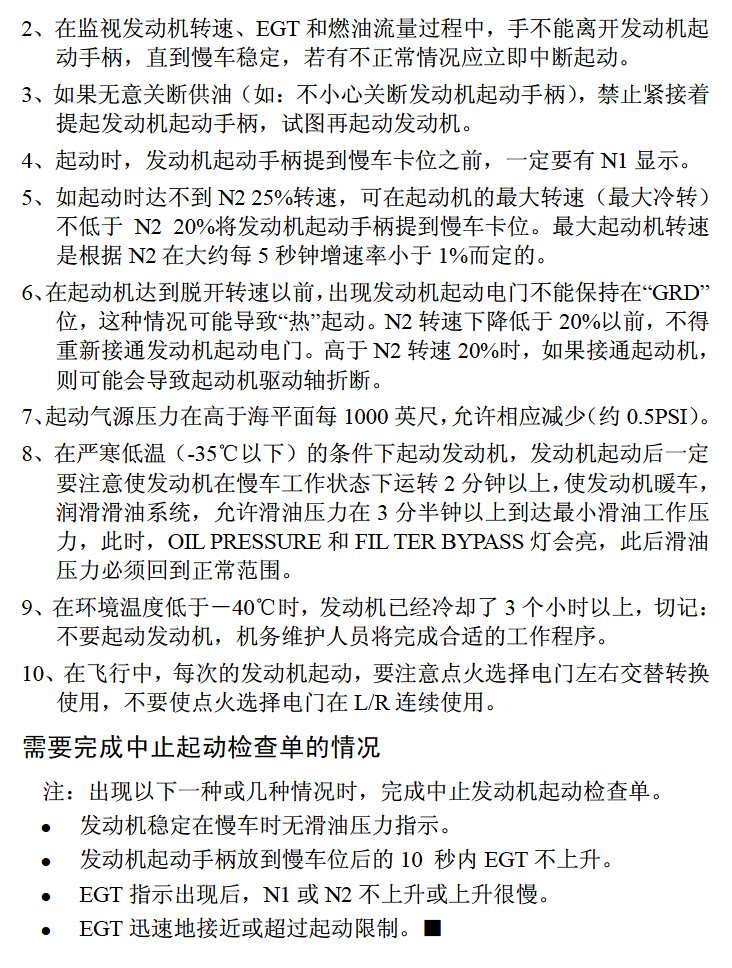
关于最大冷转max motoring的一个简单笔记
最大冷转 英文 max motoring
“冷转"是指飞机发动机不点火启动,只靠电动机供电下运转的状态。 “最大冷转转速"指这个状态下发动机可以允许的最大转速。
具体如何应用, 可以参看一下b737.org.uk中对波音737发动机启动程序的说明。
Min 25% N2 (or 20% N2 at max motoring) to introduce fuel; any sooner could result in a hot start. Max motoring is when N2 does not increase by more than 1% in 5 seconds.
因此这里发动机启动时的最大冷转转速具体就是N2的上升率不超过每5秒中上升1%的情况。
-
东航飞行培训资料 飞行管理系列大讲堂
在微信上看到非常非常专业的资料,这里一定要分享出来,供大家一起学习。 飞行管理系列大讲堂 飞行管理系列大讲堂(续) 感谢中国东方航空 上海东方飞行培训有限公司 飞行技术管理部的讲师 周晓青先生。
第一讲—-航行诸元
第二讲—-飞机
第三讲—-操纵
第四讲—-人工操作—-复飞
第五讲—-操纵和复飞1
第六讲—-操纵—-复飞2
第七讲—-学习方法与练习
刹车的减速作用最大。自动刹车和人工刹车相比,除了刹车是自动的之外,而且刹车力柔和,保持不变的减速率,可改善旅客舒适性。 减速板的减速作用次之,打开后不仅增大飞机气动阻力,同时破坏气流流动减小升力,甚至产生负升力,使作用在机轮上的正应力大为增加,从而增加机轮与道面的摩擦阻力。反推拉出可以释放减速板。 反推的作用最小,使用反推除了缩小着陆距离,还可以减小刹车强度有利于延长刹车片和轮胎的使用寿命。对于737飞机,干跑道只缩短约2%的着陆距离,湿跑道增加到约5%,污染跑道增大到约10%。
-
观察波音737-800尾部的各种进排气口等细节
没事儿翻看上周在羽田机场的照片,发现波音737-800的尾部有很多的小口, 很多都不知道是干什么的。
 于是在图上用小圆圈标出来,并请教了专家@dreamliner先生,得到以下答案。
于是在图上用小圆圈标出来,并请教了专家@dreamliner先生,得到以下答案。1 尾部白色位置灯 Strobe Light 2 APU舱/滑油冷却进气口 APU Cooling Air Inlet 3 APU排气口 APU Exhaust Outlet 4 APU盖板 5 APU舱可燃烧液体排放口 6 APU舱可燃烧/非可燃烧液体排放口 APU Shroud & Hydraulic Drain 7 绿色尾翘,防止机尾擦地 Tail Skid 8 APU进气口 APU Air Inlet Door 9 厨房厕所废水排出口 Aft Heated Water Drain Mast 10 厨房排气口 11 应急灯(如放出应急滑梯后) 12 正施压活门(舱内加压调节应急用,从机舱排气,共两个。图中看不清楚,其实外流活门下面还有一个) Pressure Relief Valves 13 外流活门(舱内加压调节) Outflow Valve 14 负施压活门(舱内加压调节应急用,从外部引气入机舱) Negative Pressure Relief Valve
话说8号的APU进气口的形状好怪,为什么做的这么不规则呢?好生费解。
 放一张特写照片仔细观察一下。
放一张特写照片仔细观察一下。2018/04/14 更新 去年买了一本叫做"精通波音737"的书籍,里面对进气口进行了解说,下面抄写一下。
-
GUMPS checklist
降落前精神准备检查单GUMPS, 一个简单的笔记。
G - Gas 油箱选择BOTH, 油泵ON, 正油压等 U - Undercarriage 起落架放下 M - Mixture 燃油混合RICH P - Propeller 桨距大 S - Seat belts and Switches 安全带, 灯光, 皮托管加热等
-
小型飞机上的反补偿片Anti-Servo Tab
Horizontal Stabilizer 水平安定面 Elevator 升降舵 Stabilator 全动平尾 Anti-Servo Tab 反补偿片
关于升降舵elevator一般是安装在水平安定面Horizontal Stabilizer的后面一部分,
 水平安定面是固定的, 升降舵是可动的。
但是对于全动平尾Stabilator来说,Stabilator本身就是升降舵。
不过trim还是需要的,这个往往由Stabilator后部的可动部分
–反补偿片Anti-Servo Tab来实现。
水平安定面是固定的, 升降舵是可动的。
但是对于全动平尾Stabilator来说,Stabilator本身就是升降舵。
不过trim还是需要的,这个往往由Stabilator后部的可动部分
–反补偿片Anti-Servo Tab来实现。<img src=http://image.slidesharecdn.com/aircraftbasics-140927035356-phpapp02/95/aircraft-basics-35-638.jpg?cb=1411790115>
但是也许更重要的是, Anti-Servo Tab会给飞行员带来操纵时的阻力手感, 最终得到防止操作过度(over control)的作用。
比如当飞行员压杆,Stabilator向上倾斜, 平尾仰角变大,造成机体后部升力变大,于是机首向下倾斜(nose down)。 但是往往升降舵的效果非常明显,反映到杆力就是力量非常轻, 如果没有Anti-Servo Tab的话,得不到足够的力量反馈, 飞行员很有可能操作过量。
有了Anti-Servo Tab的话,
 还是以压杆为例,也就是上图中的下部,
Anti-Servo Tab的可动部分的移动要比平尾大一些,
因此对于Stabilator来说,考虑到杠杆作用,
它起到对操纵杆产生了反作用力的效果。
还是以压杆为例,也就是上图中的下部,
Anti-Servo Tab的可动部分的移动要比平尾大一些,
因此对于Stabilator来说,考虑到杠杆作用,
它起到对操纵杆产生了反作用力的效果。因此飞行员手中就容易感受到压杆的阻力, 有了更好的操纵手感, 因此达到能够防止操力过度的效果。
-
Rich of Peak和 Lean of Peak
又跟百度贴吧上的大神学了些知识,下面贴出来。
当你把混合器往回拉的时候,你最终会得到一个最高的EGT值 —- Peak。 此时如果你把混合器往前推一点,就叫做Rich of Peak, 此时如果你把混合器往后拉一点,就叫Lean of peak。
当你往前推一点,达到某一个比最大EGT低一点的值, 往往会得到一个最大推力混合比。 比如峰值是500度,你往前推混合器, 得到475度时推力最大,那么就叫做25 degree rich of peak。
反之,当你往后拉一点,达到某一个比最大EGT低一点的值, 往往会得到一个最经济的混合比。 比如峰值是500度,你往后拉混合器, 得到475度时最经济,那么就叫做25 degree lean of peak。
如果你的飞机有非常精密的电子仪器同时测量EGT和CHT,就可以用LEAN OF PEAK。
大多数轻型飞机没有这么精密的仪器。 Cessna只有EGT,而且POH上规定禁止lean of peak。 Peak 和 Lean of peak 都是很危险的。 EGT 探测器只探测一个汽缸,而你的引擎是4个汽缸,天知道你的引擎什么时候爆缸? 四个汽缸会不平衡混合,你一个汽缸在lean of peak, 另外三个汽缸还在peak。 Rich of Peak少量未燃烧的燃油会在发动机各出蒸发,能降温。
-
垂直尾翼上的静压口是干什么的?
这架星空联盟涂装的ANA波音777拍于羽田机场二号航站楼,
 如果仔细观察垂直尾翼Vertical Stabilizer的话,
可以看到前缘处有两个白色的小圆圈。
如果仔细观察垂直尾翼Vertical Stabilizer的话,
可以看到前缘处有两个白色的小圆圈。于是把照片放大一下, 虽然并不太清晰,但是还是可以读出圆圈左侧有Static Port的字样,
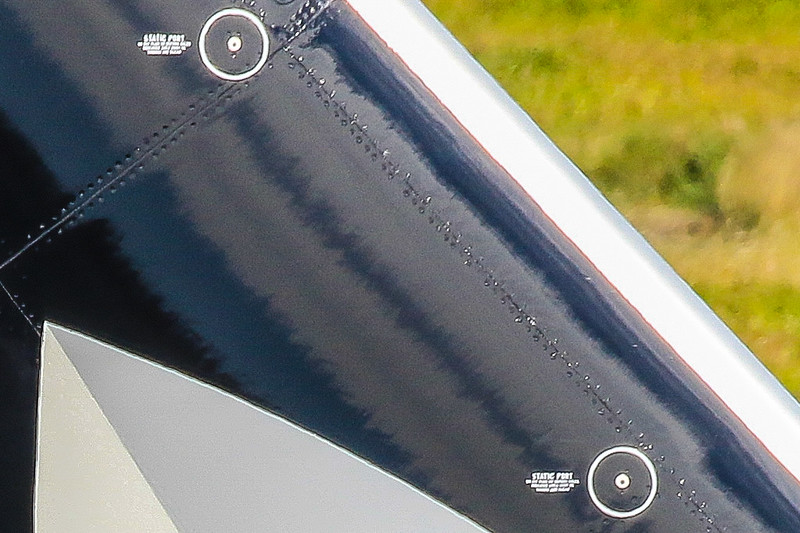 表明这里是静压口,也就是静压传感器。
表明这里是静压口,也就是静压传感器。
我们知道一般飞机机体前部都会有几个静压口, 配合总压口可以测量出高度<a href=速度等重要飞行指标。 但是这些装在垂直尾翼上的静压口是什么作用呢?
据说这些静压口又叫做Gust Suppression port。
Gust,中文可以翻译成阵风或者突风,指的是强度比较大的风扰动。 当飞机穿越阵风时,风对飞机的结构气动面产生附加的力和力矩, 不仅降低乘客的乘坐舒适性,而且会增加飞行员操纵飞机的负担,对航空安全产生影响。
波音777客机上采用了"偏航阵风抑制–Yaw Gust Suppression"的系统, 通过照片上的垂直尾翼上两侧的4个静压口,即偏航阵风抑制口, 测量出水平方向上阵风并自动控制方向舵偏转,减轻作用在垂尾上的载荷。
据说该载荷缓解技术可以保证客舱机组人员在飞机遇到阵风时, 仍然保持机体的稳定而不打断过道中的乘客服务,效果真是不错。
另外波音的新型号787还装备了更高级的垂直阵风抑制系统, 能感知湍流并指挥机翼操纵面应对湍流,从而大幅提高飞行的平稳性。
-
ASA E6-B飞行计算尺的复习
今天是假日“文化の日”,家里休息,想起那天于<a href=LUXURY FLIGHT谈起飞行计算尺, 估计自己使用方法忘记不少了,于是决定复习一下E6-B。

具体的使用方法在本站资料库有解说,这里就不再啰嗦了。 <a href=https://yinlei.org/x-plane10/view1.php?file=doc/e6b-manual.pdf>简体中文版 ASA E6B使用说明 英文版 ASA E6B使用说明
计算尺本身带的说明书里有近30道问题, 一个一个地做下来,再参看后面的答案, 发现还是有些领域忘记了不少,比如容积和重量的转换什么的。
一般玩X-Plane 10我基本以塞斯纳172为主, 飞行时也就用E6B来算算侧风的偏航角,还有就是根据速度估算一下各leg的飞行时间。 看起来今后应该每过一段时间就复习一下, 不常用功能不实践的话慢慢都会忘光了。。
-
成本系数CI cost index
在<a href=拜访JFlight的 A320 BFPT飞行模拟器里曾经提到当时设定成本系数CI为20, 就想知道实际飞行中一般这个值都为多少,于是咨询了两位专业人士,他们的回答如下。
一位波音737的飞行员告诉我一般都在35,根据巡航速度需要,速度越高CI就越大。 L学长告诉我他们公司的窄体机20到50,宽体机略大,并且国际航线大于国内航线。另外这个数值是由公司的运行部门根据燃油成本与时间成本的关系进行测算,飞行员执飞时把这个结果通过CDU(MCDU)输入到FMC里面去。
 #照片与本文主题无关
#照片与本文主题无关知道了实际数值以后再看看CI的具体解说,发现波音公司官方网站里有一篇很好的科普文章-Fuel Conservation Strategies:cost index explained。
CI = 单位时间(小时)成本(美元) Time cost / 单位燃油(磅)成本(美分) Fuel cost
分子部分的时间成本也就是与飞行时间有关的费用,比如很容易联想到机组成员的薪金,再比如飞行时间长的话,飞机的维护费用也会增加,总之"时间就是金钱",这些费用都可以归入固定成本的范围。
分母的燃油成本就是单位重量的使用燃油费用,这个概念比较单纯好理解。
飞行管理计算机根据飞行员输入的CI值和其他性能参数计算经济(ECOM)爬升速度,经济巡航速度和经济下降速度等指标。
CI值大的话,时间成本优先于燃油成本,因此经济速度也就相应增大。 CI值为0时,时间成本完全被忽视,燃油消费最小,范围空速最大,航程最长。 CI值为最大值时,燃油成本完全被忽视,飞行包线速度最快,航行时间最短。
看看波音各型飞行的成本系数范围,
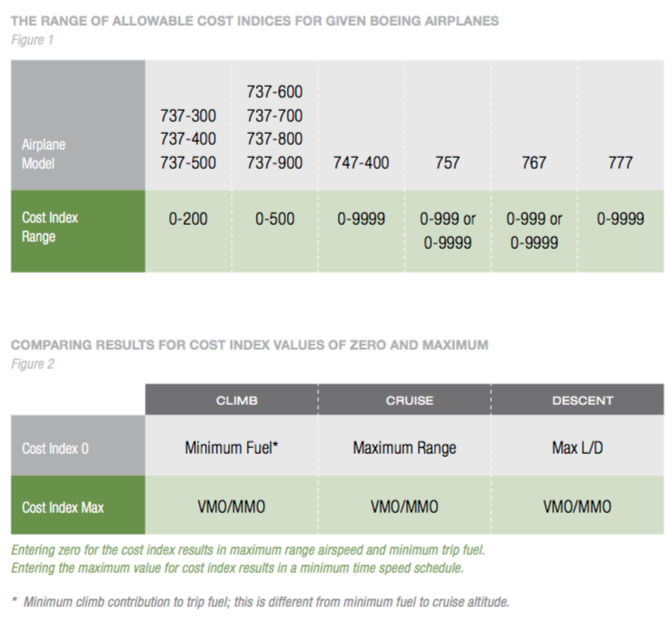 第二代737的CI值在0到200之间,737NG值在0到500之间,747-400和777都是0到9999之间。
另外表二中给出了CI为0和Max值时的速度关系,结合具体机型看实际数据如下:
第二代737的CI值在0到200之间,737NG值在0到500之间,747-400和777都是0到9999之间。
另外表二中给出了CI为0和Max值时的速度关系,结合具体机型看实际数据如下:
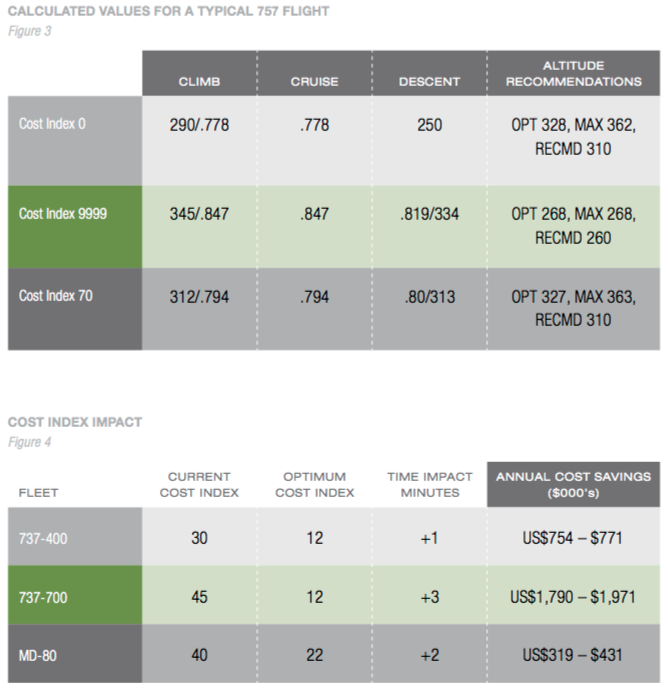 以波音757为例,
爬升和巡航时,CI为0时速度为0.778马赫,最大的9999时为0.847马赫,而CI为70时速度是0.794马赫;
下降时,CI为0时速度为250节,最大的9999时为0.819马赫,而CI为70时速度是0.9马赫。
以波音757为例,
爬升和巡航时,CI为0时速度为0.778马赫,最大的9999时为0.847马赫,而CI为70时速度是0.794马赫;
下降时,CI为0时速度为250节,最大的9999时为0.819马赫,而CI为70时速度是0.9马赫。下面的2个图也很有意思,
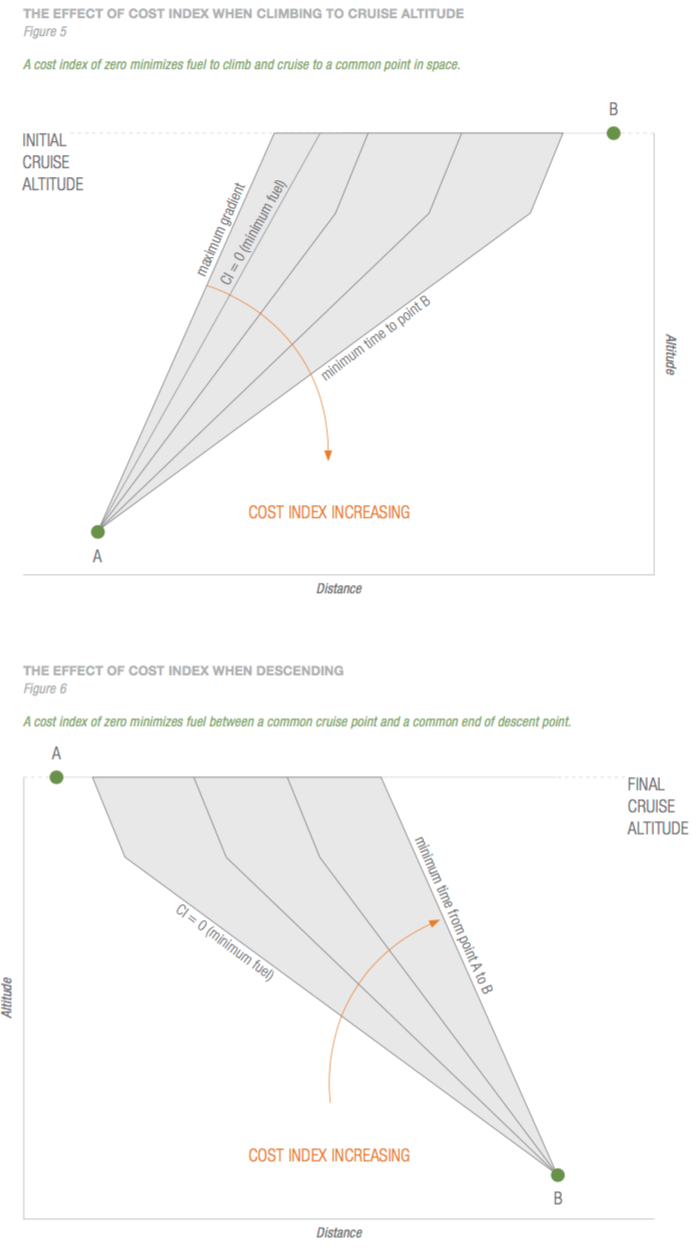 Figure 5表现的是CI值对于ECON CLIMB模式的影响,可以看到CI为0时将会获得最大爬升角度。
注意最大爬升角的意思不代表飞机能够最快爬升到初始巡航高度,
而是指出发点A点到到达巡航高度时的距离最短,因此在巡航高度上的飞行距离也就最长,
此时的速度反而是最低的。
Figure 5表现的是CI值对于ECON CLIMB模式的影响,可以看到CI为0时将会获得最大爬升角度。
注意最大爬升角的意思不代表飞机能够最快爬升到初始巡航高度,
而是指出发点A点到到达巡航高度时的距离最短,因此在巡航高度上的飞行距离也就最长,
此时的速度反而是最低的。随着CI增加时间成本被重视,燃油成本被忽视,因此飞行速度更高, 以上面的757的数字,从0.778增加到0.847马赫, 如此同时爬升角也就变小,飞到巡航高度的距离越长。
Figure 6表现的是CI值对下降模式的影响,CI为0时下降角最为平缓, 可以联想成最大限度的利用高度能量,缓慢滑翔下降的感觉。 随着CI的增加,下降角度也就更为倾斜,飞到目标地B点的距离也就最短, 因此飞行速度也就最大。 以上面的757的数字,速度从250节会增加到334节。
-
A320的载荷报告单Load Sheet
时不时可以在SNS上看到A320的着陆情况载荷报告单, 民航资源网上有一篇如何读懂A320载荷报告单介绍的不错。
比较喜欢看过载原因一段,比如这个落地落重了, 有二次接地的数据,而上面的介绍里都是0。
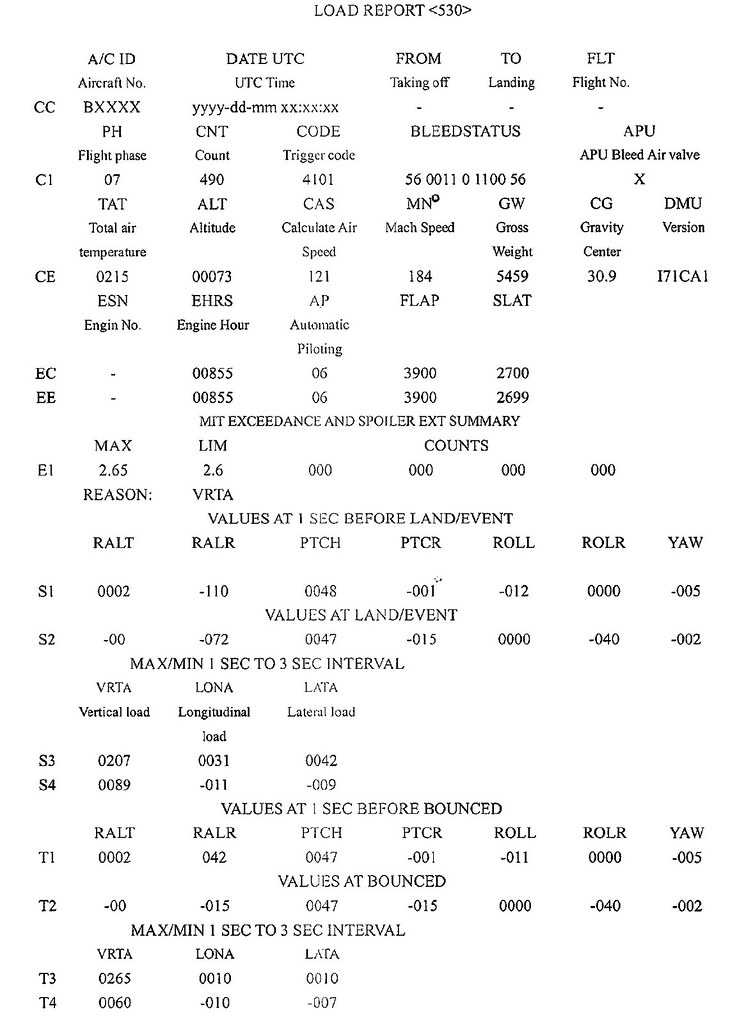 上面资料来源于Google专利页面。
上面资料来源于Google专利页面。
原因段的名词释义
AIDS (Aircraft Integrated Data System)
RALT: radio altimeter, ft 无线电高度,单位英尺 RALR: radio altimeter descent rate, ft/sec 下降率,单位英尺/秒,-99.9到99.9 PTCH: pitch angle, degree 俯仰角,单位度,-90.0到90.0 PTCR: pitch speed rate, deg/sec 俯仰角速率,单位度/秒,-45到45.0 ROLL: rolling angle, degree 横滚角,单位度,-90.0到90.0 ROLR: rolling speed rate, deg/sec 横滚速率,单位度/秒,-45.0到45.0 YAW: yaw speed rate, deg/sec 偏航速率,单位度/秒, -45.0到45.0
VRTA: vertical load acceleration, G 垂直加速度,单位G,-3.00到6.00 LONA: longitudinal load, G 纵向加速度,单位G,-1.00到1.00 LATA: lateral load, G 横向加速度,单位G,-1.00到1.00
-
关于拉平Roundout (Flare)时的视角变化
具体操作就不写了,下面美国联邦航空局的<a href=https://www.faasafety.gov/gslac/ALC/course_content.aspx?cID=34&sID=164&preview=true>资料很容易懂:
不过关于如何观察跑道视角的变化,看<a href=http://tieba.baidu.com/p/3970321943?pid=73705731249>美女飞行员的解说很好,这里抄录一下。
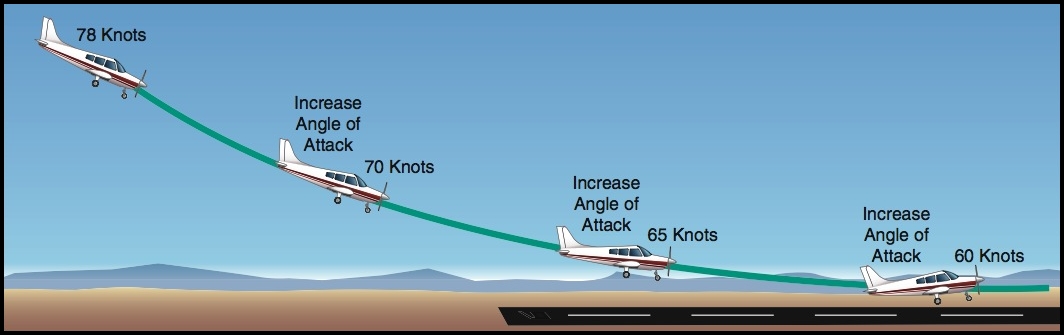
拉平的时候普遍认为要看跑道的远点,这是因为, 当你注视远方的时候,你能看清的东西多, 你周围的所有景色都在"告诉你下沉率和高度。
当你注视远方的时候,实际上你还要关注机头蒙皮前方和两侧。 注视远方的时候,你会在某个时刻,感受到跑道被极大的压扁; 同时你扫视机头蒙皮前方和两侧的时候,你会在某个时刻, 感受到跑道极大的扩张。这时候你就应该拉平了。
当你拉平的全过程,都必须要完全注意视觉的扩张和形变, 你不能再去看仪表了。
99%的人一开始都会拉平过早。这是因为几百万年人类进化来的。。。 人的眼睛为了保护你不从高处摔下来的本能。 视觉的形变让你产生恐惧感,你想早点避免这种形变。。。 或者你故意不看它。 但是逃避不是办法,需要利用它。
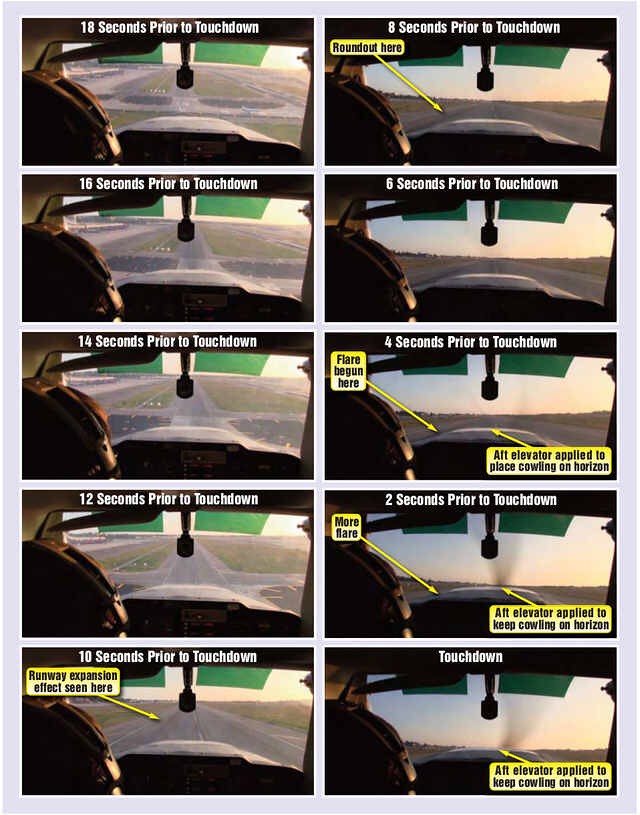
跑道被压扁呀,跑道在扩张这些说法挺形象的, 再结合上面的图(左下角的10 Seconds Prior to Touchdown),就更容易理解了。
完
-
防冲出跑道系统ROPS
看到Airbus的防冲出跑道系统(Runway Overrun Prevention System,简称ROPS)的新闻, 其ROPS应用于A330系列飞机日前成功获得了欧洲航空安全局(EASA)的适航认证。 空客ROPS应用于A330获认证,ROPS覆盖空客全机型 A330のオーバーラン防止装置、EASAが認可
抄录一下ROPS的资料,按照上面中国民航网中的说明, ROPS本质上是一个警报系统,它可以帮助提高飞行员在降落时的情境意识, 降低飞机冲出跑道的风险,而且在必要的情况下,该系统可以为飞机提供主动保护。 从现在开始,空客所有机型都能够在出厂时就安装ROPS, 而且所有在役的空客飞机也都可以通过改装来安装ROPS。
跑道偏离(runway excursion)是指飞机从侧面或者从尽头冲出跑道, 它很长时间以来都是造成民用航空器事故的主要原因之一。
拥有专利技术的空客防冲出跑道系统已经成功获得了EASA、FAA和CAAC的适航认证, 它可以计算飞机降落时的最小空中着陆距离和在地面上的制动距离, 并且将计算出来的数据与机场跑道的实际情况进行实时对比。 该系统的数据库不仅涵盖了天气因素、跑道条件、地形地貌, 还涵盖了飞机重量及构型等多个方面。
通过电脑的分析,空客防冲出跑道系统可以在不同情况下向机组人员进行紧急语音提示、报警等, 从而协助机组人员在是否复飞的决定过程中做出正确的选择, 或者在着陆过程中帮助机组人员快速地应用停止装置。
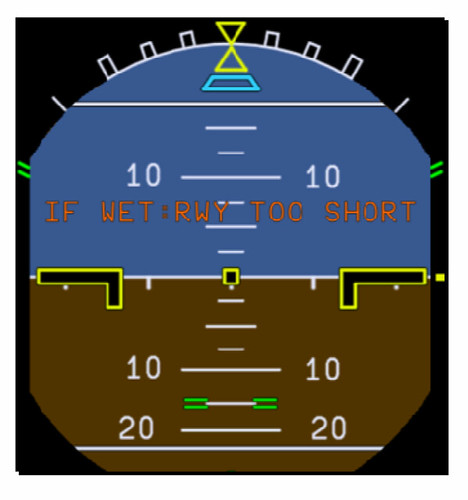
再看一个空客的资料, Runway Overrun Prevention System ROPS = ROW + ROP ROW: 冲出跑道警告 Runway Overrun Warning ROP: 冲出跑道保护 Runway Overrun Protection
比如如果湿跑道情况下,冲出跑道警告距离大于剩余跑道长度的话, 并且飞机高度低于400英尺时,ROPS将会在PDF中显示出琥珀色的警告信息, 该信息会闪烁显示9秒钟。
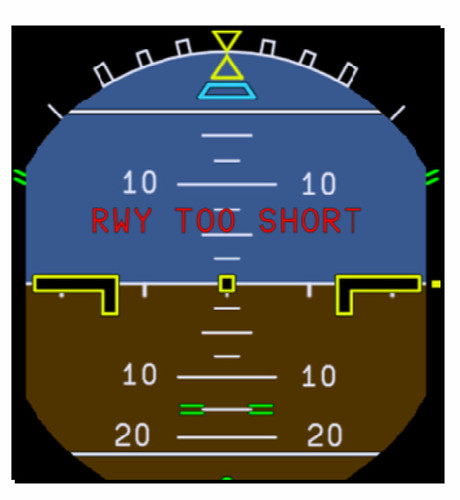
在干跑道情况下,冲出跑道警告距离大于剩余跑道长度的话, 飞机高度低于400英尺时,ROPS将会在在PDF中显示9秒的红色闪烁报警, 高度低于200英尺时,将会发出紧急语音提示"RWY TOO SHORT"。
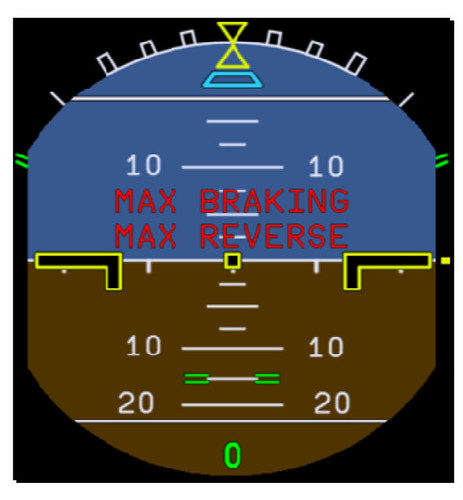
如果冲出跑道保护的距离大于剩余跑道长度的话, 可以在PDF上看到红色的报警信息, 并且连续发出"BRAEK… MAX BRAKING"和"SET MAX REVERS"语音提示, 提醒飞行员使用最大的刹车和反推; 在速度80节以下后,如果仍然跑道长度不够的话, 还会继续发出一次"KEEP MAX REVERSE"语音, 提醒飞行员继续保持最大的反推。
完
-
coupled approach
1 这实际上就是我们常说的某款飞机能否自动跟随航道和下滑道的时候使用。 在欧洲飞通航也常用ILS和MLS但很多旧飞机未必有自动驾驶能自动跟随。
2 An instrument approach performed by the aircraft autopilot, which is receiving position information and/or steering commands from onboard navigation equipment.
In general, coupled non-precision approaches must be discontinued and flown manually at altitudes lower than 50 ft below the minimum descent altitude, and coupled precision approaches must be flown manually below 50 ft AGL (above ground level).
Coupled and autoland approaches are flown in VFR (visual flight rules) and IFR (instrument flight rules). It is common for carriers to require their crews to fly coupled approaches and autoland approaches (if certified) when the weather conditions are less than approximately 4000 RVR (runway visual range).
-
一些航路更新
中国大陆 <a href=/x-plane10/view.php?file=doc/IFRMFCNr1507.pdf>离境国际航路International Flight Routes from Mainland of China Nr1507 <a href=/x-plane10/view.php?file=doc/IFRTMCNr1507.pdf>入境国际航路International Flight Routes to Mainland of China Nr1507 <a href=/x-plane10/view.php?file=doc/OFRNr1507.pdf>通过国际航路Overflying Flight Routes Nr1507 <a href=/x-plane10/view.php?file=doc/RFRNr1507.pdf>港澳台区域航路Regional Flight Routes Nr1507
日本 <a href=https://yinlei.org/x-plane10/view.php?file=doc/JP-eAIC-2015-032-en-JP.pdf>飛行計画経路20 AUG 2015 飛行計画経路30 APR 2015
美国 NFDC Preferred Routes Database Query NFDC Preferred Routes Database
-
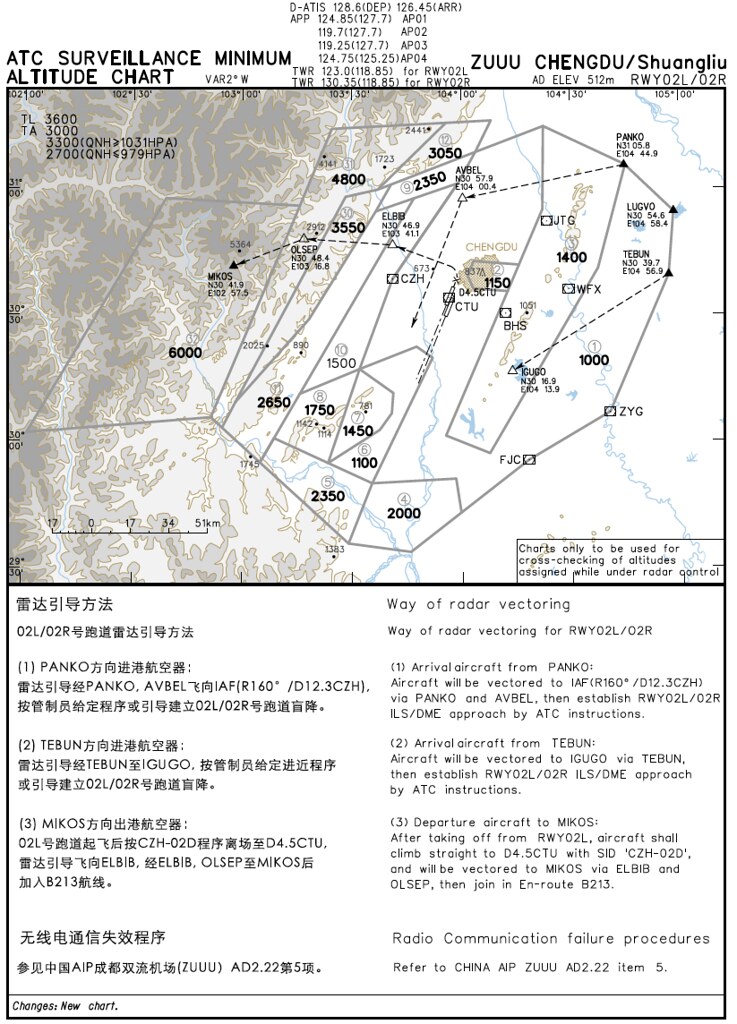
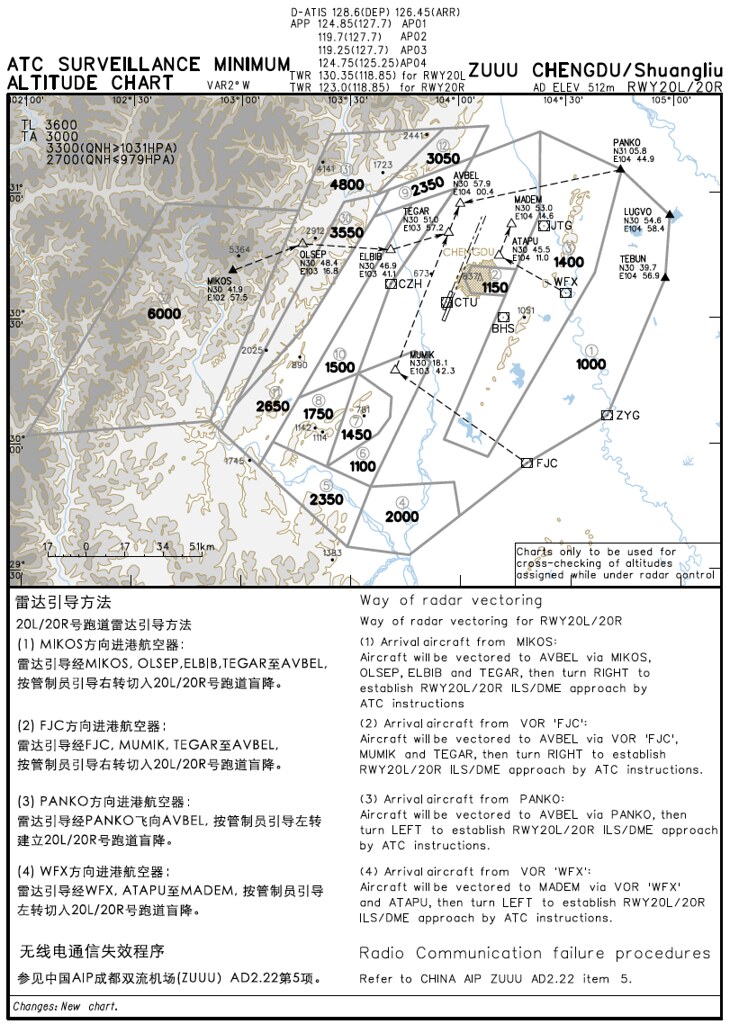
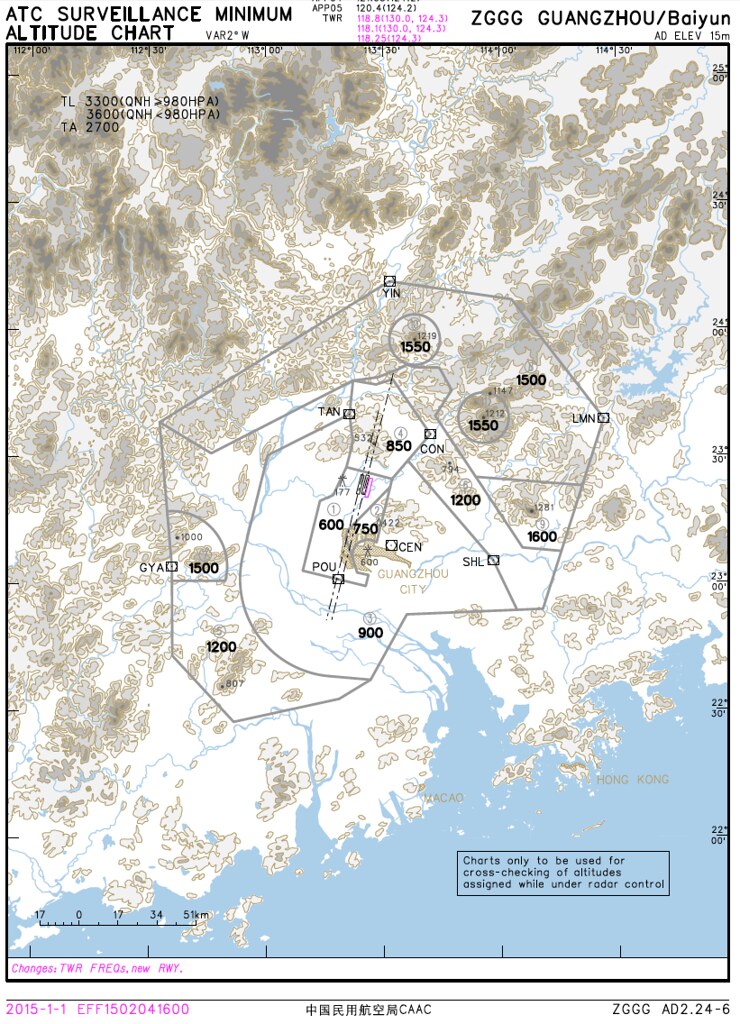
最低监视引导高度图ATC Surveillance Minimum Altitude Chart
闲来无事读AIP,看到<a href=中国民航eAIP中新增了一种航图—最低监视引导高度图 ATC Surveillance Minimum Altitude Chart,这是个新知识点,就查来看看。
看ICAO对ATC Surveillance Minimum Altitude Chart的说明如下: This supplementary chart must provide information which will enable flight crews to monitor and cross-check altitudes assigned while under radar control by a controller using an ATS surveillance system. 也就是在雷达引导下,机组用来交互检查和监视各个雷达引导区域和引导扇区的最低高度用的。
现在中国民航公布的最低监视引导高度图只有3个,即成都双流机场的02L/02R和20L/20R的两个,以及广州/白云机场的一个。
图看起来还是挺直观的,虚线标出了雷达引导时的线路示意,机组结合每个扇区的最低雷达引导高度,对安全的超障余度有个比较清晰的理解。
1 成都/双流 CHENGDU/Shuangliu ZUUU AD2.24-6A ATCSMAC RWY02L/02R
2 成都/双流 CHENGDU/Shuangliu ZUUU AD2.24-6B ATCSMAC RWY20L/20R
3 广州/白云 GUANGZHOU/Baiyun ZGGG
完
-
ILS的磁方位角也会变
看<a href=http://dgraph.info/air/?itemid=414>这里的信息,ILS的航向道磁方位角发生变化, 从6月25日起,由79度变为80度,这种现象很常见吗?是地磁偏差的变化引起的吗? 还请专家指教。
稚内空港のILS-LOC 08磁方位変更 (1)ILS-LOC 08:111.1MHz [IWK] CAT-I opr0830~1830 (2)ILS-LOC 08 BRG(MAG):079 → 080 (3)有効日:15/06/25
