コックピットの中
-
旅客機の操縦探秘4.6 燃料消費と重心について
前回は自動操縦モードにおいて、航空機が事前に設定されたルートに沿って自動的に飛行するについて説明しましたが、パイロットも怠けているわけではありません。継続的に飛行計器を監視し、各ウェイポイントを通過するたびに、通過時刻と残燃料量を記録する必要があります。
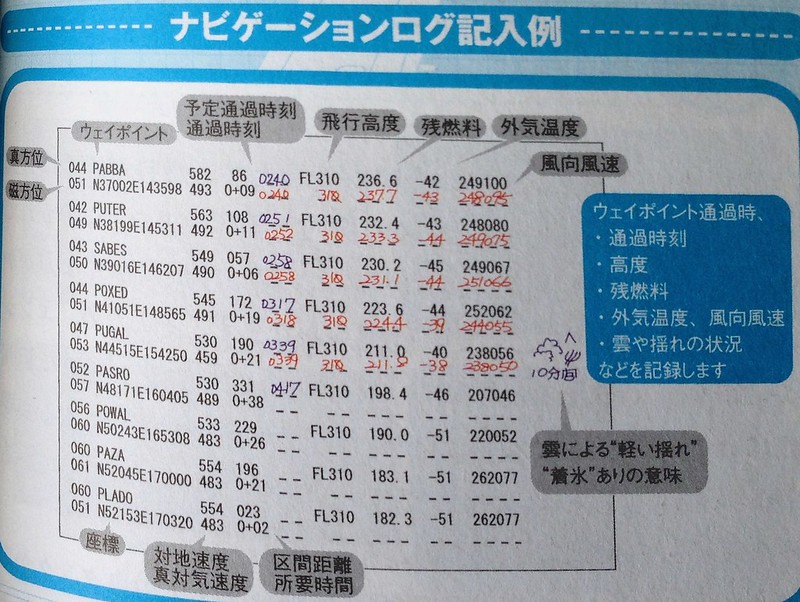 上記はフライトログの例です。各ウェイポイントにおいて、パイロットが通過時刻、飛行高度、残燃料、外部気温、および風向風速の情報を記録していることがわかります。5行目には、飛行中に10分間の軽い乱気流が発生したことが記録されています。
上記はフライトログの例です。各ウェイポイントにおいて、パイロットが通過時刻、飛行高度、残燃料、外部気温、および風向風速の情報を記録していることがわかります。5行目には、飛行中に10分間の軽い乱気流が発生したことが記録されています。
本シリーズの<a href="/blog/ja/2012/12/ja-airline_pilot_13>“1.3 飛行準備会(ブリーフィング)では、詳細なフライトプランについて紹介しました。この計画は以下の情報に基づいて算出されます。
- 航空機の重量(旅客の予約人数から計算可能)
- 飛行距離
- 飛行速度
- 上空の風向風速予測値
- 上空の気温
このうち、上空の風と気温の予報情報は、世界地域予報センターWAFC(World Area Forecast Center)から取得できます。世界地域予報システムは、国際民間航空機関(ICAO)の枠組みの下、気象部門や認定ユーザーに国際航空に必要な航空気象資料(文書形式の飛行気象情報や天気図など)を提供するものです。ロンドンとワシントンにある2つの世界地域予報センター(WAFC)が、人工衛星を通じて世界地域予報システムの製品を放送しています。現在、わが国の民間航空国際線の気象支援は、主にロンドン航空気象センターから提供されています。
WAFCが提供する情報は非常に正確ですが、「天気が変わりやすい」という言葉がある通り、天候の急変は飛行速度やルートに影響を与える可能性があります。また、実際のフライト運航では交通量の問題により、流制(ATCによる管制)を避けることはできません。飛行速度、高度、およびルートは空中交通管制の要求に応じて変更されるため、当初のフライトプランで予測された燃料消費量も変化します。したがって、残燃料量を継続的にチェックすることは非常に重要です。
航空機の燃料タンクは一般的に、左右の主翼内と胴体中央部に配置されており、各タンクは独立しているため、胴体が傾斜した際に一方のタンクから他方のタンクへ燃料が流れることはありません。もし燃料が自由に流動すれば、飛行中の重心が絶えず変化し、安定した飛行制御が非常に困難になります。
下図はボーイング777型機の燃料タンク位置の概略図です。左翼メインタンク(Left Main Tank)、センタータンク(Center Tank)、右翼メインタンク(Right Main Tank)の相対位置がわかります。
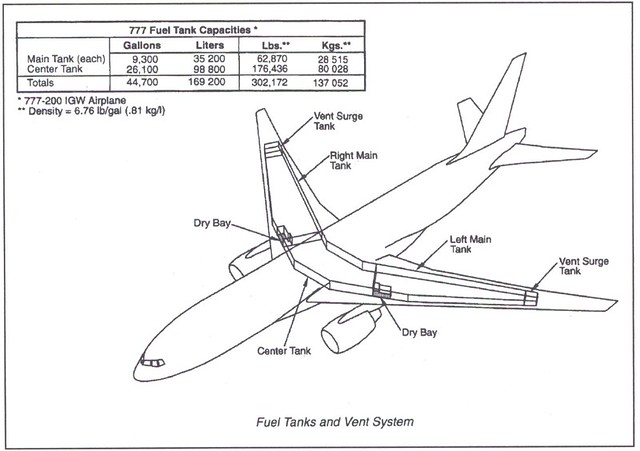 3つのタンクにはそれぞれ対応する燃料ポンプがあり、燃料配管やチェック弁(一方向弁)などの部品を通じて接続されています。エンジンに燃料を供給する際、システムは各タンクからの供給順序を調整し、各タンクの重量を調整して重心を適切な位置に保つことで、翼根(翼根とは、主翼と胴体が接合する部分)における応力集中を軽減する効果があります。
3つのタンクにはそれぞれ対応する燃料ポンプがあり、燃料配管やチェック弁(一方向弁)などの部品を通じて接続されています。エンジンに燃料を供給する際、システムは各タンクからの供給順序を調整し、各タンクの重量を調整して重心を適切な位置に保つことで、翼根(翼根とは、主翼と胴体が接合する部分)における応力集中を軽減する効果があります。図には通気サージタンク(Vent Surge Tank)も見えます。これは主翼の最高位置にあり、タンクと外部の通気口としての役割を果たします。燃料がエンジンに送られるにつれてタンク内の圧力が低下すると、外部大気圧よりも高くなり、タンクを押しつぶすような圧力が生じます。例えば、ストロー付きの紙パック飲料を飲んだことがある人は、飲料が吸い出されるにつれてパック内の圧力が低下し、外部大気圧によってパックがぺちゃんこになるのを経験したことがあるでしょう。燃料タンクも同じ原理です。圧力でつぶれないように、この通気口によってタンク内の圧力を外部と一定に保つと同時に、燃料の流れをよりスムーズにしています。
航空機の重量の大部分と搭載物は胴体に集中していますが、空中での揚力は主に主翼から発生します。そのため、下向きの重力と上向きの揚力が翼根付近で曲げモーメントを生じさせ、このモーメントは航空機の構造に強い影響を与えます。主翼タンク内の燃料重量は、揚力を相殺し、翼根の曲げモーメントを低減する役割を果たします。これが、最初に主翼タンクに給油し、可能な限り主翼内に燃料を保持する理由です。
旧式のボーイング747-200では、エンジンへの燃料供給時にまずセンタータンクを使用し、センタータンクが空になった後に両翼のメインタンクを使用していました。ボーイング777も基本的に同じ方式を採用しています。最初に使用されるのはセンタータンクですが、実際には3つのタンクすべての燃料ポンプが稼働しており、センタータンクの燃料ポンプの出力が大きいため、まずセンタータンクから直接両側のエンジンに燃料が供給されます。この方式の利点は、センタータンクの燃料ポンプに故障が生じた場合でも、両側のタンクの燃料ポンプが稼働しているため、バックアップ(予備)としての役割を果たすことです。センタータンクが空になると、燃料ポンプは自動的に停止します。
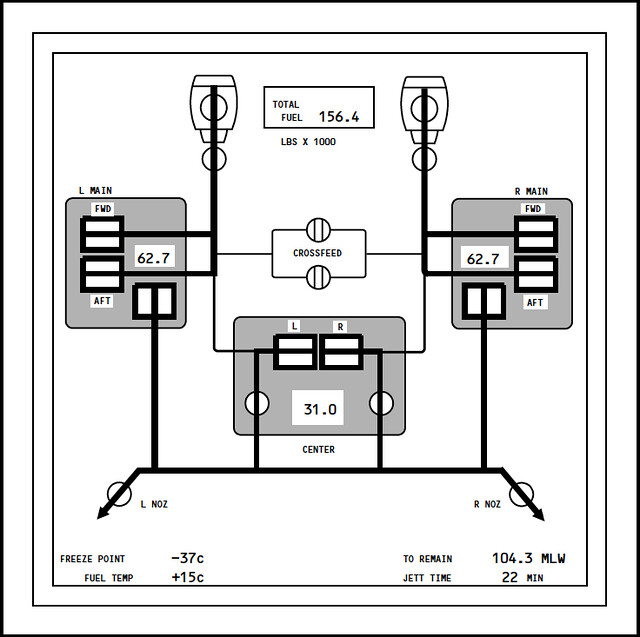
ボーイング777のEICAS表示:
一方、エアバス330-200の動作方式は少し異なります。同じく最初にセンタータンクを使用しますが、センタータンクから直接エンジンに供給するのではなく、まずセンタータンクの燃料を両側のメインタンクに移送し、その後、左右の主翼メインタンク内の燃料ポンプを通じてエンジンに直接供給します。
現代の旅客機の燃料供給システムは自動化されていますが、ボーイング747-200のような旧式の航空機では、各タンクの残量を継続的に確認し、手動で各タンクの調整を行う必要がありました。
次に、重量とバランス(Weight and Balance)の概念について紹介します。これは、航空機が運航自重、ペイロード(業載)、燃料重量とその分布に基づき、様々な制限条件を満たした状態で、離陸重量、重心、およびトリム調整の状態を達成することを指します。飛行機によく乗る旅客ならご存知の通り、飛行中、航空機のバランスを崩して操縦性に影響を与えないよう、旅客が勝手に座席を乗り換えることは禁止されています。
航空機は空中で運航される際、支えとなる着力点がないため、重心のバランスは飛行安全に影響を与える重要な要素です。各機種には、飛行安全、操縦の利便性、燃料節約を確保するために、重心の前後移動に対する制限範囲が設けられています。これを重心許容範囲と呼び、航空機の重心はこの前後の制限を超えてはなりません。
航空機の重心がわずかに前方にある場合、安定性が高く、気流に遭遇しても揺れにくくなります。一方、重心がわずかに後方にある場合、操縦性が良く、燃費も向上します。しかし、重心が極端に前寄りまたは後ろ寄り、さらには安全許容範囲を超えると、深刻な結果を招く可能性があります。軽い場合は着陸装置の損傷、構造への損傷、燃料消費の増加、航空機の寿命短縮、滑走路の損傷などにつながり、重い場合は離着陸時にテールストライク(尾部擦過)、滑走路オーバーラン、あるいは失速による墜落を引き起こす可能性があります。
重心位置は、平均空力翼弦(Mean Aerodynamic Chord、略称MAC、すなわち主翼の幾何学的重心)線上のパーセンテージで表現され、単位は%MACです。例えば下図のボーイング777の場合、MACの長さは7メートルです。もし重心値が25%MACであれば、
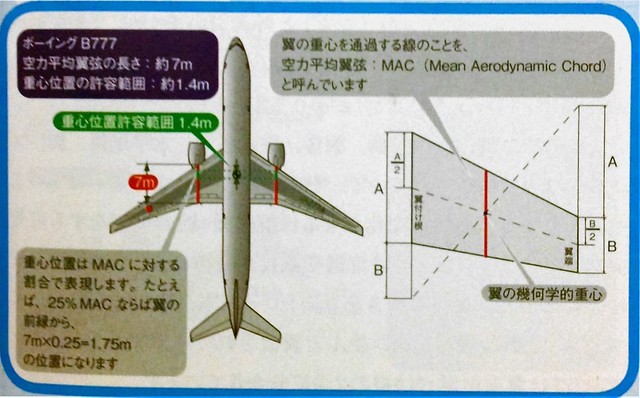 重心は主翼前縁から 7m × 25% = 1.75m の位置にあります。一般的に、航空機の重心許容範囲は非常に狭く、上記の777の場合、許容範囲はわずか1.4メートルです。別の例として、ボーイング747の許容範囲は13~33%MAC、エアバス380は29~44%MACです。
重心は主翼前縁から 7m × 25% = 1.75m の位置にあります。一般的に、航空機の重心許容範囲は非常に狭く、上記の777の場合、許容範囲はわずか1.4メートルです。別の例として、ボーイング747の許容範囲は13~33%MAC、エアバス380は29~44%MACです。地上で航空機の重量と重心の管理を担当するのはロード・コントロール係(配置搭載員)です。彼らは航空機の離陸性能表を对照し、空港の気象、地形、障害物が離陸重量に与える影響、および空港の滑走路が航空機の離着陸重量に課す制限に基づいて、航空機の重量制限を計算し、最適なバランス位置の重心を確定します。これに基づき、貨物、郵便物、手荷物の機内での配置を合理的に決定します。これを「ローディング・プラン(積載表)」と言います。もし航空機の実際の重量とロード・コントロール係が作成した重量データが一致しない場合、パイロットの操縦に影響を与え、間違った飛行速度や角度を決定させる可能性があり、安全上の隠れた危険(リスク)が生じます。実際の重量が航空機の許容最大制限重量を超えた場合、機体が崩壊し、人命が失われる恐れがあります。
重量の計算には、乗客の平均体重設定が関係します。例えば、国内線では一般的に64キログラム、国際線では73キログラム、パイロットは77キログラム、客室乗務員は59キログラムと設定されています。しかし、時には特殊な状況もあります。例えば、あるフライトで多くの相撲力士を乗せる必要がある場合、事前に各力士の体重を聞き取り調査し、各自の座席状況に基づいて、航空機全体の重心位置を計算する必要があります。また、例えば<a href=“http://book.douban.com/subject/20495472/"『ロンドンからニューヨークへ-ボーイング747-400を操縦して』という本で紹介された逸話があります。あるフライトのパイロットが任務を遂行中、通常よりもはるかに制御しにくい(離陸の滑走距離が長くなる、上昇率が低いなど)と感じましたが、異常事態が見つかりませんでした。後に着地して調査したところ、このフライトの乗客の多くがある古代貨幣収集協会に属しており、それらの収集家が搭乗際に多くの重い古代貨幣を携帯していたため、航空機の実際の重量が予測重量を大幅に上回っていたことが判明しました。幸い、あの時は事故が発生しませんでしたが、あれは極めて危険なフライトでした。
完
-
旅客機の操縦探訪4.5 クルーズ速度について
巡航高度と同様に、巡航速度においても燃費の経済性を考慮する必要があります。 自動車が「1リットルあたり何キロ走れるか」で性能を評価するのと同様に、 航空機でも燃料単位当たりの飛行距離でその性能を表すことができ、これを航続率(Specific Range)と呼びます。 航続率とは、無風状態における燃料単位当たりの飛行距離のことです(例:燃料10,000ポンド(約4.5トン)時のデータなど)。 その数値は、TAS(真対気速度)を燃料流量で割ったものです。
航続率と速度の関係については、下図を参照してください。
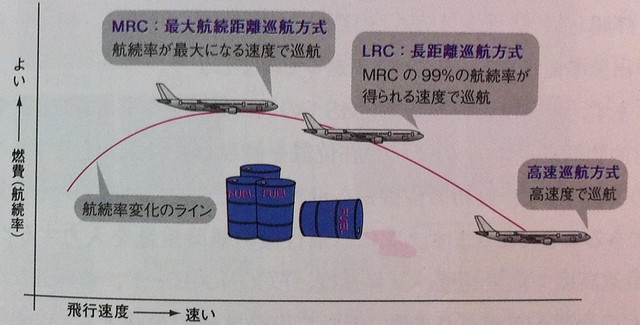
横軸は速度を表しており、右に行くほど速度が高くなります。縦軸は航続率を表しており、上に行くほど経済性が高いことを示します。 図中の弧線は航空機の性能曲線です。低速域と高速域では航続率が低く、燃料を多く消費することがわかります。 曲線の最高点にある速度をMRC(最大航続巡航速度)といい、航空機がこの速度で飛行すれば最も燃費が良くなります。 しかし、この時の速度はあまりにも遅く、乗客や航空会社はこの数値には満足しないでしょう。 そこで、多少燃料を消費しても、より早く目的地に到着でき、かつ長距離を飛行できるようにするために、 LRC(長距離巡航速度/Long Range Cruise)という指標が登場しました。 LRCは、MRCの99%の効率となる指標を使用して飛行します。つまり、MRCよりも1%多く燃料を消費しますが、9%速度を向上させることができます。
もちろん、MRCとLRCはともに理想的な数値であり、実際の運航では「経済速度(エコノミークルーズ速度)」という概念が使用されます。 経済速度とは、運航コスト全体を最小にする速度のことです。
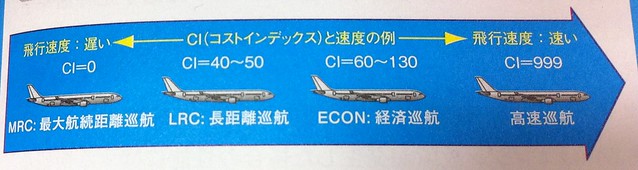
では、運航コストにはどのような項目が含まれているのでしょうか? 主に、航空機の整備費、保険料、空港使用料(航空会社は空港管理会社に対し、離着陸サービス料、地上サービス料、航路費、空港指揮料、およびターミナル内の敷地使用料などを支払う必要があります)、スタッフの給与・賞与、そして燃料費用のいくつかの部分で構成されています。燃料費以外のこれらのコストは、時間に関連するコストと見なすことができます。例えば、フライト時間が長くなれば、客室乗務員に支払う手当なども増額されます(国内でも同じでしょうか?)。そのため、運航コストと経済速度の関係を計算するために、以下に示すコスト指数CIという概念が導入されています。 CI = 時間に関連するコスト / 燃料コスト
CI = 0 のときの速度、つまり燃料コストを最も重視する速度は、MRC(最大航続巡航速度)となります。一方、CI = 999 のときの速度、つまり時間コストを最も重視する速度は、最大巡航速度となります。
航空会社は、自社の経営方針に基づいてCIを設定し、採用する経済速度を決定します。燃料コストを重視する場合は、比較的小さなCI値を採用して高い航続率を確保しますが、飛行速度は相対的に低くなります。一方、時間に関連する運航コストを重視する場合は、比較的大きなCI値を採用するため、飛行速度は相対的に速くなります。
下図のCIと速度の関係を見ると、経済巡航速度のCI値は60から130の間にあり、飛行速度はLRC(長距離巡航速度)よりわずかに大きくなることがわかります。
今後フライトに乗る際は、機内のモニターに表示される速度をぜひ確認してみてください。そのフライトの巡航速度がどのくらいか見てみると面白いでしょう。 下の写真は、北京-東京路線を飛行中のボーイング777-200で撮影したものです。当時の対地速度が時速918キロメートル、飛行高度は約12,500メートルであることがわかります。

最後に、個人的な体験談を一つ。 ある冬、東京からニューデリーへ向かう際、行きは東から西へ向かう一路上空のジェット気流に逆らって飛行しました。 最大対地速度は時速650キロメートルしかなく、カメが歩くような遅さで、結果として飛行時間は10時間半を要しました。 一方、帰路は強力な追い風に乗り、対地速度は時速1100キロメートルに達しました! そのため、帰りのフライトはわずか6時間半で到着しました。本当に信じられない体験でした。
>Prev: 关于巡航高度 TOC: 目录 >Next: 关于燃油消耗和重心
完
-
旅客機操縦の探秘4.4 巡航高度について
一般的に、短距離の国内線では巡航高度はほぼ一定です。前のセクションで紹介したように、巡航に入ってから降下および着陸を開始するまで、悪天候や緊急事態がない限り、航空機はその高度を維持し続けます。しかし、遠距離の洋上国際ルートでは、段階的に高度を上げる「Step Up Cruise」(ステップアップクルーズ)が採用されることがよくあります。ここで、ボーイング777-300ERによる東京からニューヨークへのフライトを例に、高度がどのように割り当てられているか見てみましょう。
燃費効率を考慮すると、航空機は低高度よりも高高度の方が航続距離が長くなります(燃費が良い)。しかし、長距離ルートを飛行する場合、短距離よりも多くの燃料を搭載する必要があります。大重量の状態で無理に一度に高迎角で巡航高度まで上昇させると、かえって燃費効率が悪化します。ある重量において航空機には最適な高度指標があり、燃料の消費に伴って機体重量が低下するにつれ、その重量時の高度指標に従って高度を徐々に上げることで、最良の経済性(燃費)を得ることができます。
以下の図を例に見てみましょう。このボーイング777の離陸重量は343トンで、離陸20分後にまず31000フィートまで上昇し水平飛行に入ります。これは、この高度がこの時点での重量に対して最も経済的だからです。2時間50分後、32000フィートへ上昇します。32000フィートで1時間10分間飛行した後、機体重量は298トンまで低下し、航空機は33000フィートへ上昇します。33000フィートで約4時間間巡航した後、重量は266トンまで低下したため、再び37000フィートへ上昇します。37000フィートでは目的地に近づいているため、40分強という短い飛行時間でしたが、全体的な燃費効率は依然として良好でした。
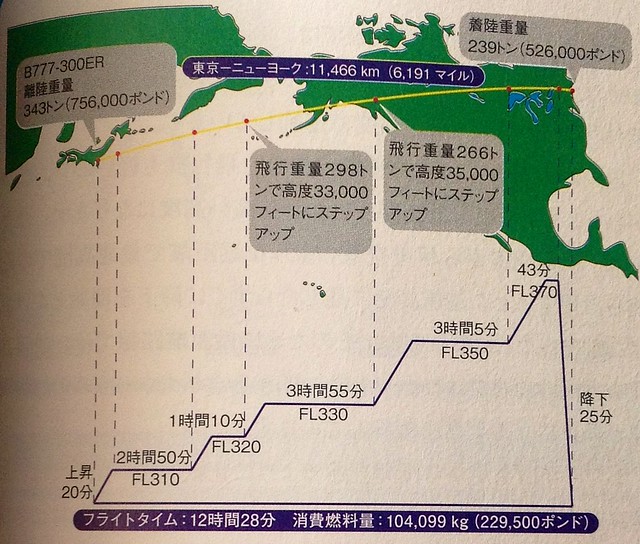
上の図から分かるように、段階的に巡航高度を上昇させるこの方法では、飛行時間が12時間28分、燃料消費量は105トンでした。これに対し、ずっと31000フィートで巡航し続ける方法と比較して、2分の飛行時間と1.7トンの燃料を節約できました。
今後、飛行機で移動する際は、外のエンジン音に注目してみてください。もし1、2分間だけエンジン音が急に大きくなったら、パイロットが巡航高度を調整して上昇している可能性があります。機内エンターテインメントシステムの高度表示に注意を払い、時折記録すると良い習慣になります。
短距離フライト(例えば東京から大阪まで、1時間もかかりません)でも、高度と燃費効率の問題は存在します。この場合、搭載燃料量が少なく、航空機は高高度へ到達しやすいですが、目的地が近いため、せっかく空気抗力の少ない高度まで上昇しても、すぐに降下しなければならず、結果的に全体的な燃料消費としては割に合いません。したがって、上昇、降下、巡航をすべて含めたトータルの燃料消費が最適になる高度を選択する必要があります。
比較的長い航路では高い高度を採用できますが、時にはジェット気流の存在に注意する必要があります。
ジェット気流(Jet Stream)は、地球を囲む数本の強くて狭い高速気流の帯で、対流圏界面または成層圏に集中しており、中高緯度の偏西風帯内や低緯度地域に出現します。その水平規模は数千キロメートル以上、幅は数百キロメートル、厚さは数キロメートルにも及びます。中心風速は時速200~300キロメートルに達することがあります。高空で気流と逆方向に飛行することは、逆水行舟(川を逆流すること)のように航空機の対地速度を大幅に低下させますが、気流に乗れば大幅に速度を増すことができます。そのため、アジアから北米やカナダへ向かう航空機は、航路の短縮と燃料節約のためにこのジェット気流帯を利用し、帰路では北極ルートをとることがあります。
日本の国内線でもこの気流は利用されます。例えば、冬に東京羽田から福岡へ向かうフライトでは、ジェット気流を避けるために比較的低い高度を選択します。これにより、向かい風の気流速度は約100km/hとなり、高高度の気流速度の300km/hよりもはるかに低くなります。もちろん、帰路では高高度を利用して飛行することになります。
-
旅客機のコックピート探訪4.3 飛行高度と気圧、そして最大飛行高度
前回は速度に関する指標について説明しましたが、今回は高度に関するデータについて説明します。
航空機の高度計には、気圧高度計(barometric altimeter)と電波高度計(radio altimeter)の2種類があります。まずは気圧高度計を見てみましょう。
高度が上がるにつれて空気密度が減少し、それに伴って気圧も下がることは誰でも知っています。そこで大気圧を測定し、標準値と比較することで、測定地点の絶対高度値(海抜高度)を求めることができます。これが気圧高度計(altimeter)の基本的な動作原理です。気圧を使用して測定する利点は、高度計が小型で構造が簡単であることですが、欠点もあります。それは、高度以外に温度や水蒸気密度の変化も気圧の変化に影響を与えることです。そのため、航空機ではパイロットは必ず現地の実際の大気状況に基づいて気圧計の校正を行う必要があり、離陸前と着陸前には欠かせません。正確に把握できない高度での着陸がいかに危険であるかは言うまでもありません。
例を挙げましょう。前日が高気圧の晴れの日で、ある航空機が海抜高度6.4メートルの羽田空港に着陸した際、当時の気圧は1013ヘクトパスカル、機上の高度計は29.92インチ水銀柱に設定され、高度計は21フィートを表示していました。翌日に雨が降り始め、気圧が997ヘクトパスカルに低下したとします。もし校正を行わなければ、この時の高度計の表示は450フィートとなり、メートルに換算すると137メートルになります。海抜6メートルの地上に停まっている航空機の計器が、とんでもなく137メートルも表示していることになります。これが天候が高度計に与える影響の大きさです。したがって、離陸前にパイロットは必ず高度計を997ヘクトパスカル(29.45インチ水銀柱)に設定しなければなりません。この設定値の情報は、空港の航空管制官、航空会社のディスパッチャー、または空港のATISから取得することができます。
気圧に関してはいくつかの用語が頻繁に使われるので、以下に簡単にまとめます。
-
**“現場気圧QFE”**は、空港の水平面の気圧です。FEは"Field Elevation"で覚えることができます。パイロットがQFEの高度計設定を使って高度表を校正した場合、空港上では高度計の針は0フィートを指します。
-
**“修正海面気圧QNH”**は、国際民間航空機関(ICAO)が定めた標準大気に基づいてQFEを変換した値です。NHは"Not Here"で覚えることができます。前述した空港での高度計設定に使用されるのが、このQNH値です。パイロットがQNHの高度計設定を使って高度表を校正した場合、空港上では高度計の針はその空港の海抜高度を指します。これは航空図に記載されている空港データでもあります。したがって、空港付近での離陸、上昇、降下、着陸のプロセスでは、QNH値を基準として高度表を修正する必要があります。これにより、離陸および着陸するすべての航空機が同一の基準を使用して飛行高度を測定することになり、地上への衝突や航空機同士の衝突、異常接近などの事故を防ぐことができます。
-
**“標準大気圧QNE”**は、標準大気条件における海面の気圧を指します。その値は1013.2ヘクトパスカル(29.92インチ水銀柱)です。空港付近ではQNH値を基準にすることができますが、空港間を飛行する場合は気圧の変化は一定ではなく、地上や海上に無数の観測所を設けてQNHを測定することも不可能です。そのため、すべての航空機が統一された基準であるQNEを使用すれば、高度表の修正が簡素化され、空中の安全が保証されます。では、どのような条件下でQNHをQNEに調整するのでしょうか。規定では「遷移高度」が設けられており、QNHがこの高度を超えると、パイロットは高度計をQNE、つまり29.92インチ水銀柱(1013.2ヘクトパスカル)に設定する必要があります。また、各国によって遷移高度の規定は異なります。例えば上昇時、中国は3000メートル、日本は14000フィート、アメリカは18000フィート、イギリスは6000フィート、シンガポールとタイは11000フィートとなっています。
引き続きボーイング777を例に、実際の計器表示を見てみましょう。下の図のPFD(Primary Flight Display)で、高度表示は右側の高度ストリップの中央の四角い枠内にあります。
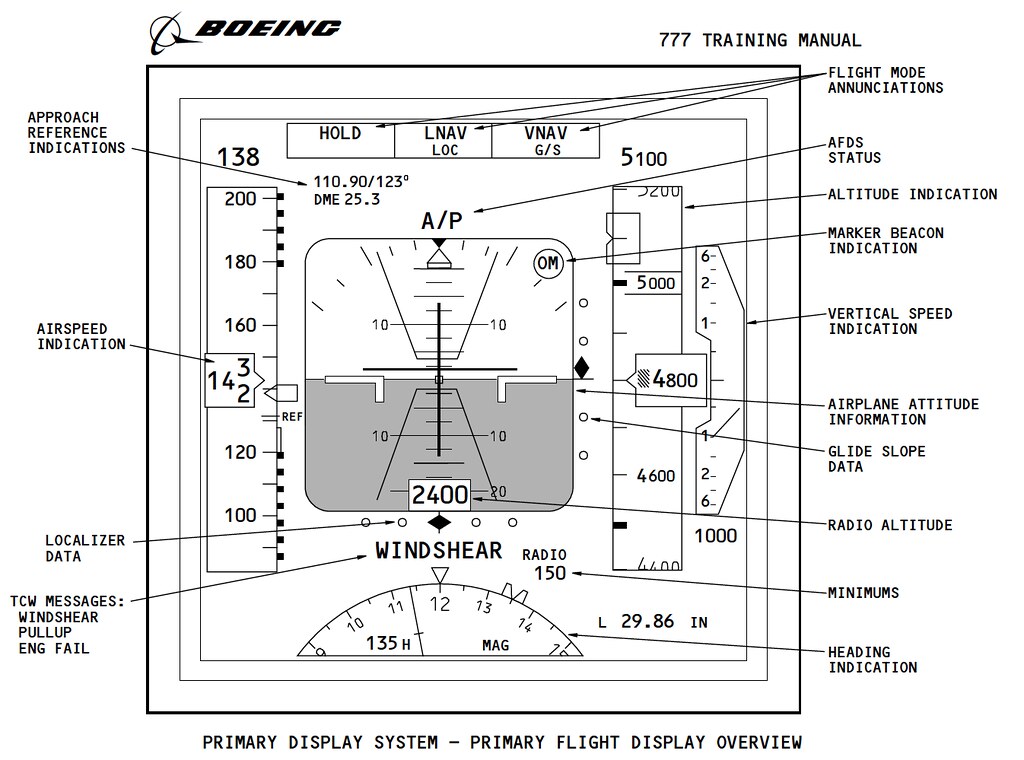 数字の"4800"は高度計が4800フィートであることを示しており、その下の"29.86 IN"のデータは高度計が29.86インチ水銀柱に設定されていることを示しています。これは、この時航空機がQNH値を使用していることを意味します。
数字の"4800"は高度計が4800フィートであることを示しており、その下の"29.86 IN"のデータは高度計が29.86インチ水銀柱に設定されていることを示しています。これは、この時航空機がQNH値を使用していることを意味します。次の図を見てください。高度計の部分だけを取り出し、それぞれの数字を具体的に説明しています。
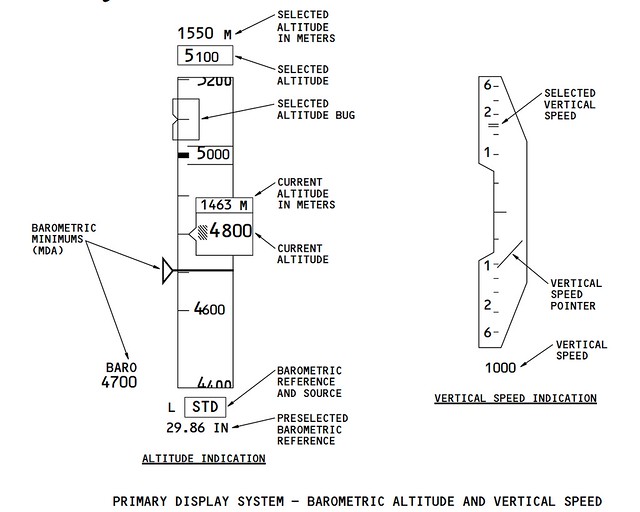 中央の四角い枠の中にある"CURRENT ALTITUDE"の矢印が指す数字"4800"は、高度計が4800フィートであることを示しています。その下にもう一つの枠内に"STD"と表示されています。これは、現在の航空機がQNEの標準大気圧を使用していることを示しています。同時に、STDの下にある"PRESELECTED BAROMETRIC REFERENCE"の矢印が指す"29.86 IN"のデータも見えます。これはプリセットされた高度計の値で、29.86インチ水銀柱に設定されています。パイロットは降下フェーズに入る前に、目的地のQNH値をセットしておくことができます。航空機が遷移高度を下回った後、切り替えボタンを押すだけで済むため、操作が大幅に簡素化されます。
中央の四角い枠の中にある"CURRENT ALTITUDE"の矢印が指す数字"4800"は、高度計が4800フィートであることを示しています。その下にもう一つの枠内に"STD"と表示されています。これは、現在の航空機がQNEの標準大気圧を使用していることを示しています。同時に、STDの下にある"PRESELECTED BAROMETRIC REFERENCE"の矢印が指す"29.86 IN"のデータも見えます。これはプリセットされた高度計の値で、29.86インチ水銀柱に設定されています。パイロットは降下フェーズに入る前に、目的地のQNH値をセットしておくことができます。航空機が遷移高度を下回った後、切り替えボタンを押すだけで済むため、操作が大幅に簡素化されます。
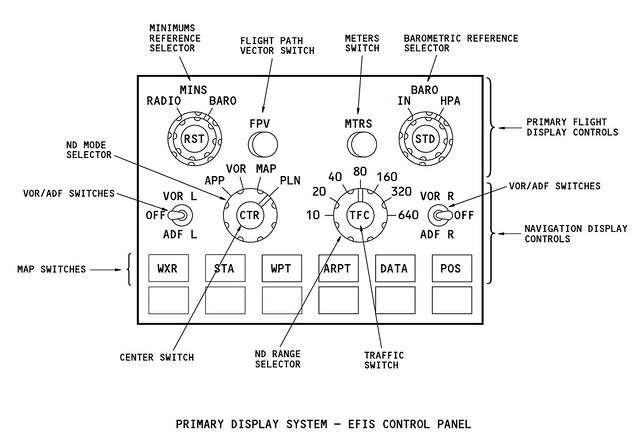 STDボタンは上の図にあるEFISコントロールパネルの右上方にあり、“BAROMETRIC REFERENCE SELECTOR"の矢印が指すBAROノブが高度表設定の場所です。
STDボタンは上の図にあるEFISコントロールパネルの右上方にあり、“BAROMETRIC REFERENCE SELECTOR"の矢印が指すBAROノブが高度表設定の場所です。高度の単位について、一般的に欧米や日本ではフィートを使用し、中国はメートルを使用しますが、QNE高度設定を使用する場合はFly Levelという言葉が使われます。Fly Levelを使用する場合、数字の後ろの2つのゼロは省略されるため、35000フィートはFly Level 350と呼ばれ、一般にはFL350と記されます。例えば3.7節の航空管制会話でこのような紹介があったことを覚えているでしょうか: “Tokyo Control,Air System 115,Leaving 7800 for FL210,Initially Proposed FL410” “東京センター、エアシステム115です。高度7800フィートからFL210へ通過中、最終目標高度はFL410です” ここでは7800、FL210、FL410を使って高度を表現しています。今なら意味が分かりますね。7800はQNH下での高度7800フィート、FL210はQNE下での高度21000フィートという意味です。
では、一般的に旅客機は最大どれくらいの高さまで飛べるのでしょうか。最大飛行高度、つまり「上昇限度」には2つの要素、揚力と機体強度が関係します。
航空機が飛行できるのは空気が存在するからです。エンジンが航空機を推進し、一定の速度に達すると、主翼に作用する気流が上向きの揚力を発生させ、航空機は上昇し続けます。しかし、高度が高くなるほど空気は薄くなり、エンジンに入り込む空気量が減るため、エンジンが発生できる推力も低下し、最終的に航空機が上昇できる限界に達します。この時、航空機は水平飛行しかできません。これが航空機の「実用上昇限度」という概念です。航空機の上昇速度が低下し、垂直方向の上昇率が300フィート/分(90メートル/分、人間が歩く速度と同じくらい遅い)に低下した時の高度が、実用上昇限度となります。したがって、同型の航空機であれば、エンジン出力が大きく、重量が軽いほど、実用上昇限度は高くなります。
機体強度は、航空機の内外の圧力差に関係します。1万メートル以上の高高度では、気温は約氷点下50度、気圧は地上の20%しかありません。そのため、旅客機内にエアコンと加圧設備で適切な温度と気圧を供給しなければ、乗客は生存できません。エアコンについては、一般的に客室内温度は24度が基準ですが、夏は薄着なので少し温度を上げ、冬は厚着なので少し下げる調整がされます。しかし、温度に比べると加圧調整の方が少し難易度が高いです。
例えば、客室内を常に1気圧に保ったまま上昇し続けるとすると、外部の気圧が低下し続けるため、内外の圧力差が作用して、航空機は風船のように膨らみ続けることになります。11000メートルでは内外の圧力差は8.1トン/平方メートルになり、機体に作用しますが、13000メートルの高度では8.7トン/平方メートルの力に達します。これには、航空機の機体強度がそれほど大きな圧力に抵抗し、変形しないことが求められます。同時に、フライトごとの上昇と降下に伴い、機体に作用する膨張と収縮の力が繰り返され、最終的には金属疲労を引き起こし、機体の破裂などの強度上の重大な問題を引き起こす可能性があります。
そのため、航空機の設計においては、高度の変化に伴い、外部の気圧の変化に合わせて機内の気圧も徐々に調整し、内外の圧力差の影響を軽減します。もちろん、気圧が低すぎると人体に不快感を与えるため、圧力を下げるとしても最低でも0.75気圧、つまり海抜2400メートルの高度相当の気圧までに抑えられます。実際の飛行高度と区別するために、この高度値は「客室高度」と呼ばれます。
したがって、航空機の最大飛行高度は、客室高度との圧力差によって決まります。例えばボーイング747の場合、機体の最大許容圧力差は6.1トン/平方メートルであり、客室高度を2400メートル以下に維持するための最大飛行高度は13750メートルとなります。
他の現代旅客機の最大飛行高度データも見てみましょう。 エアバスA380:圧力差6トン/平方メートル、最大高度13100メートル エアバスA330:圧力差5.8トン/平方メートル、最大高度12520メートル ボーイング777:圧力差6トン/平方メートル、最大高度13130メートル
以上です。
-
-
旅客機の操縦探検4.2:飛行速度の指標および、航空機の最大飛行速度はどれくらいですか?
巡航段階では、航空機に搭載されている自動操縦装置は非常に進化しており、パイロットが直接操縦を行わなくても飛行可能です。 しかし、それだからといってパイロットが手を組んで座っていられるわけではありません。常に各種計器をスキャンし、各種飛行データをチェックし、時には記録もするため、やはり忙しいものです。
以下では、飛行データに関する情報をいくつかの節に分けて簡単にまとめてみます。 まずは速度について見てみましょう。
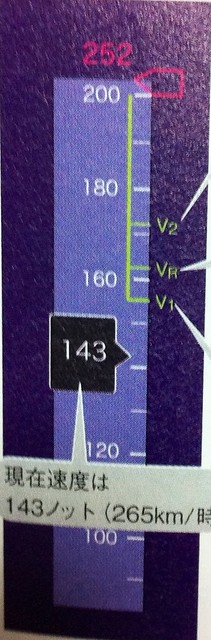
最初にIAS 指示対気速度(Indicated Airspeed)です。この数字はPFDの左側にあるスピードバーの中央の四角い枠内に表示されます。 下図のボーイング777トレーニングマニュアルにあるように、AIRSPEED INDICATIONの矢印が指す箇所の数字がIASで、 現在の速度が142.5ノットであることを示しています。
指示対気速度は、ピトー管(またはピトット-static管、Pitot tube)と静圧孔を使って測定された、航空機が空気に対して相対的に移動する速度です。ピトー管の外形は下図をご覧ください。
 これは私が東京羽田空港の国際ターミナルで撮影した全日本空輸のボーイング777ですが、
機首の右側前に突き出した2つの針のようなプローブが見えるでしょう。それらがピトー管です。
安全を確保するため、一般的に航空機には信頼性を高めるために複数のピトー管が搭載されています。
例えばボーイング777には3つ装備されており、右側に2つ、左側に1つです。
これは私が東京羽田空港の国際ターミナルで撮影した全日本空輸のボーイング777ですが、
機首の右側前に突き出した2つの針のようなプローブが見えるでしょう。それらがピトー管です。
安全を確保するため、一般的に航空機には信頼性を高めるために複数のピトー管が搭載されています。
例えばボーイング777には3つ装備されており、右側に2つ、左側に1つです。ピトー管の原理は比較的単純です。下図のように、図の下方で「全圧」と書かれた箇所(つまり動圧)がピトー管前端の空気吸入口を表し、 「静圧」と書かれた場所は静圧孔を表し、機体側面の中央に位置しています。
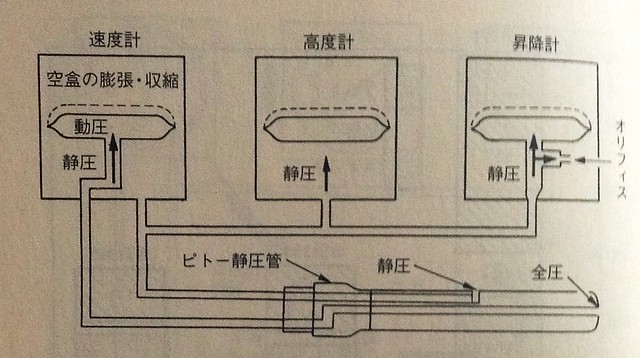 ピトー管が感知する真正面からのラム空気(ram air)の圧力と、側面の静圧孔が感知する静圧との差圧が、指示対気速度の入力となります。
航空機の速度が速いと動圧が大きくなり、それによって対気速度計内部の「アネロイド(空盒)」を押して膨張させ、逆に収縮させます。
ここでの「アネロイド」は2枚の非常に薄い金属板を溶接して作られており、外圧を受けると箱がわずかに変形します。
「アネロイド」の変位量がコンピュータに送られます。動圧は速度の2乗に比例するため、計算を行うことでシステムは指示対気速度を算出します。単位は海里/時間(ノット、knot)です。
ピトー管が感知する真正面からのラム空気(ram air)の圧力と、側面の静圧孔が感知する静圧との差圧が、指示対気速度の入力となります。
航空機の速度が速いと動圧が大きくなり、それによって対気速度計内部の「アネロイド(空盒)」を押して膨張させ、逆に収縮させます。
ここでの「アネロイド」は2枚の非常に薄い金属板を溶接して作られており、外圧を受けると箱がわずかに変形します。
「アネロイド」の変位量がコンピュータに送られます。動圧は速度の2乗に比例するため、計算を行うことでシステムは指示対気速度を算出します。単位は海里/時間(ノット、knot)です。動圧(指示対気速度計の表示数値)=1/2 * 空気密度 * 真速度^2
この公式から分かるように、同じ動圧、つまりIASの表示であっても、高度が異なれば飛行速度も異なります。この点については、後でTASを説明する際に実際の数字を使って詳しく解説します。指示対気速度IASは補正されていない生データであり、計器速度(Calibrated Airspeedの近似)とも呼ばれ、航空機が空気に対して相対的にどれくらいの速度で動いているかを示します。 IASは、航空機が地面に対して速く飛んでいるか遅く飛んでいるかを直接表すものではありませんが、非常に重要です。なぜなら、指示対気速度は航空機の空力性能の指標であり、 様々な機動操作や操舵面の操作(フラップを出すタイミング、最大飛行速度、失速速度など)を行う際の基準となるからです。 したがって、パイロットは飛行中、この指標を絶えず監視しなければなりません。
また、知っておくべき点として、動圧は空気密度に比例するため、飛行高度が高くなるほど空気密度は低くなります。 したがって、航空機が対地速度を900キロメートル/時間まで加速しても、IASはゆっくりと低下していく可能性があります。
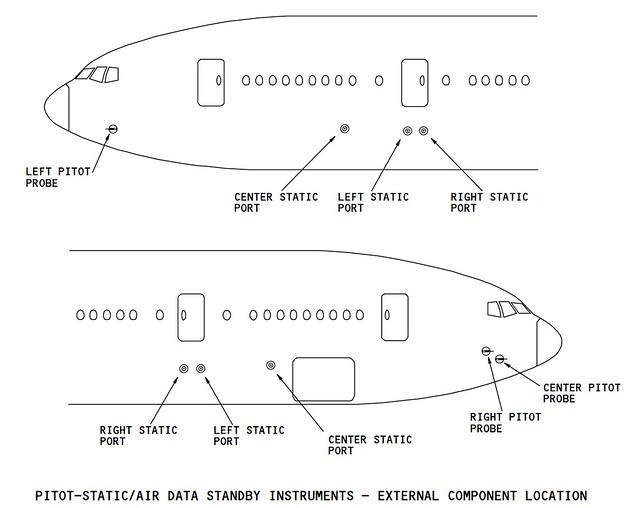
参考:下図はボーイング777のピトー管と静圧孔の位置を示した図です。
2つ目の速度に関する指標はTAS 真対気速度(TRUE AIRSPEED)、または真空速です。下図のND画面左上の「TAS 326」という表示がそれです。
-thumb-640x434.png)
上記のIAS指示対気速度は地表付近の空気密度を基準として計算されるため、航空機の現在の高度にある気圧を基準として計算された速度こそが、真の航空機の対気速度、すなわちTAS真対気速度です。TASによって初めて、航空機の実際の飛行速度の速さを知ることができます。これこそがTASがND(航法显示器)に表示される理由です。
IASとTASのデータを比較してみましょう。例えばIASが270ノットのとき、 地上:TASは当然270ノット。動圧は大気圧17(※数値は原文のまま)。 高度20,000フィート(約6,100メートル):空気密度は53%減少するため、同じ動圧を保つにはTASは362ノット、つまり時速670キロメートルが必要です。 高度30,000フィート(約9,100メートル):空気密度は37%減少するため、同じ動圧を保つにはTASは423ノット、つまり時速783キロメートルが必要です。 高度35,500フィート(約10,800メートル):TASは462ノット、つまり時速856キロメートルになります。
お分かりいただけたように、飛行高度が高くなるほど、エンジンの推力を増やす必要がなくても、航空機の実際の速度はどんどん速くなります。 航空会社や乗客にとって、旅程時間を節約し、できるだけ早く目的地に到着できることは望ましいことです。したがって、できるだけ高高度を飛行するというのは、誰にとっても喜ばしい選択と言えるでしょう。
3番目の速度指標はGS、つまり対地速度です。この指標の意味は最も分かりやすく、航空機が地面に対してどれくらいの速度で飛んでいるかを示します。
GS速度は風力と風向に関係します。向かい風(ヘッドウィンド)の条件では、TAS真対気速度から飛行方向に対する風速を引いたものがGS対地速度になります。逆に追い風(テールウィンド)の場合は、風速を足したものがGSになります。
したがって、上図のGS338は対地速度(GROUND SPEED)が338ノット/時間であることを示し、 TAS326は真対気速度(TRUE AIRSPEED)が326ノットであることを示しています。 その下の336度/11は、風向が336度、風速が15ノットであることを表しており(※原文ママ、画像等の文脈から推測に変更なし、ただし数値不一致は原文まま)、 さらにその下の矢印が風向を指し示しているため、この時航空機はほぼ真後ろからの追い風状態にあることがわかり、対地速度が対気速度よりも速くなっているのです。
-
旅客機の操縦探秘4.1 ナビゲーションの基礎知識
巡航段階に入ると、パイロットは少しホッとして、離陸以来の緊張を解くことができます。 客室乗務員もコックピットにコーヒーなどの飲み物を提供してくれます。機内は乾燥しているので、パイロットも時々水分補給をする必要があるからです。
彼らが休憩している間に、私たちも少し立ち止まって、離陸からここまでの道のりを振り返ってみましょう。
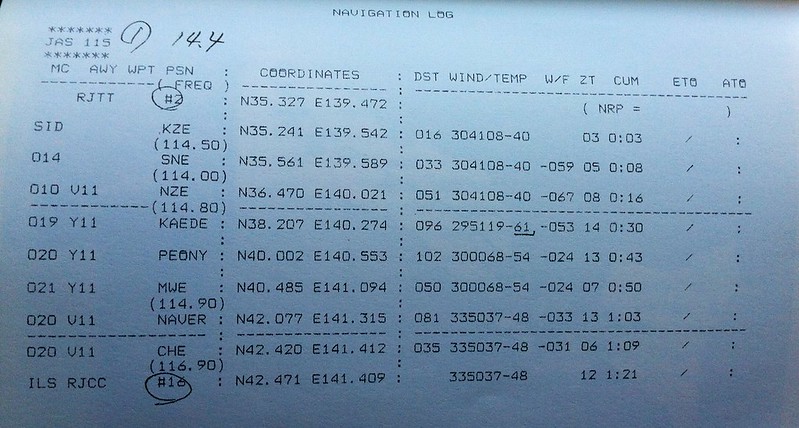
JAS115便を例に挙げて、まずは航路図とNAVIGATION LOG(ナビゲーションログ)を見てみましょう。
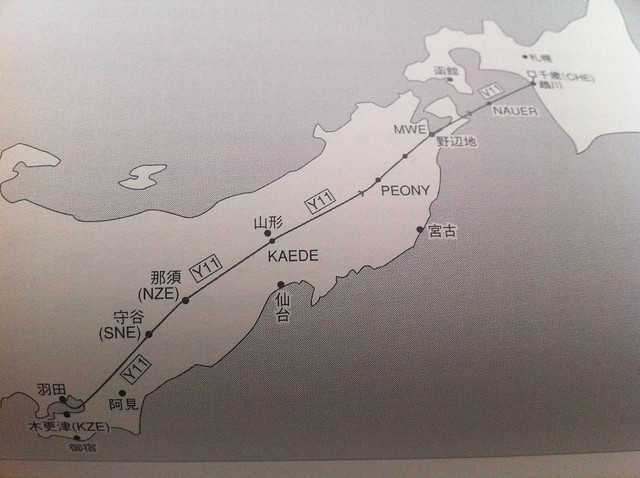
この機が選択したナビゲーション航路は、標準出発儀式進路(SID)、木更津KZE、守谷SNE、那須NZE、 山形KAEDEウェイポイント、PEONYウェイポイント、野辺地MWEウェイポイント、海上のNAUERウェイポイント、そして北海道の千歳CHEです。 機は基本的にY11航空路に沿って飛行し、離陸から守谷SNEまでの累計飛行距離は約50海里、 巡航段階まで上昇する那須NZEまでの累計飛行距離は約100海里(160キロメートル)、高度は40,000フィート(12,000メートル)に達し、所要時間は約16分です。以下の図の通りです。
ナビゲーションではVORやDMEなどの航空用語がよく使われますので、以下で簡単に説明します。
VOR(Very High Frequency Omni-directional Range:VHF全方向式無線標識)は、航空用の無線ナビゲーションシステムです。その動作周波数帯は108.00 MHzから117.95 MHzのVHF(超短波)帯であり、それゆえにこの名前で呼ばれます。 VORシステムは1949年に国際民間航空機関(ICAO)によって国際標準の無線航行設備として承認され、現在広く使用されている陸上ベースの近距離測角システムの一つです。 VOR送信機から送信される信号には2種類あります:一つは位相が固定された基準信号、もう一つはビーコン局を中心とした円周の角度に連続的に変化する位相を持つ信号です。つまり、各角度から発射される信号の位相はすべて異なります。 360度(磁北を指す)に発射される信号は基準信号と同相(位相差0)であり、180度(磁南を指す)に発射される信号は基準信号との位相差が180度です。 航空機に搭載されたVOR受信機は、受信した2つの信号の位相差に基づいて、自機がビーコン局のどの角度から発射された信号上にいるかを計算することができ、これにより航空機はVORを使用してVOR局に対する方位を知ることができます。
VORは通常、測距儀(DME:Distance Measurement Equipment)と同じ場所に設置されており、VOR-DME局と呼ばれます。 これにより、航空機に対して方向情報を提供すると同時に、ナビゲーション局までの距離情報も提供されるため、航空機の位置を一意に特定することができます。
以下は大阪国際空港内にあるVOR/DME局の写真です。コードサインはOWE、周波数は113.9MHzです。大阪空滑走路32Lの外側から私が撮影しました。

航路図上では、VORは目盛りの付いた円で表され、その横に四角い枠で名称、周波数、識別コードなどの情報が記載されています。 以下はSkyVectorウェブサイトのスクリーンショットで、中央にある大阪OSAKA OWEナビゲーション局の情報を見ることができます。
-thumb-640x587.png)
上の図の右上にあるOTSU局、コードサインCUE、周波数117.1MHzを見てみましょう。 この局を通っていくつかの航空路が交差していることがわかります。各航空路には081、087、108などの数字がありますが、 これらはVORラジアル(Radial)と呼ばれ、通常はR-081やR-087のように記されます。 R-081は、このラジアルがそのVOR局の磁北に対して81度の角度であることを示し、R-087は87度の角度であることを示します。
航空機はあらかじめ入力された航空路に沿って自動ナビゲーションで飛行しており、パイロットはND(航法表示器)で現在の位置や各ナビゲーション局、ウェイポイントの情報を確認でき、非常に一目瞭然です。 以下はボーイング777型機のマップモード時の表示例です。
-thumb-640x434.png)
図の中央下にある三角形のAIRPLANE SYMBOLは機自身のマークです。 ジグザグの実線のROUTE線はFMS(フライトマネジメントシステム)で設定された航路であり、航路上の星型マークはウェイポイントです。 破線のSELECTED TRACKは、オートパイロットパネル(MCP)で設定した針路を示しており、90度方向を指しています。
図の真上の四角い枠内のCURRENT TRACKの数字は、現在の機の針路が140度(磁北に対して)であることを示しています。 一方、横のTRKとマークされた三角形のCURRENT HEADINGは機首方向を示しており、135度になっています。 この2つのデータは、機の進行方向が機首の向いている方向と等しくないことを示しています。これは風の影響を受けているためです。 フライトマネジメントシステムコンピュータ(FMS)は、機の進行方向が真っ直ぐ進むように、機首を風上に少し向けるよう指示しています。この2つの角度の差は、3.5節で述べた風修正角(WCA:Wind Correction Angle)です。
画面の右上には次のウェイポイントへの情報が表示されています。図のように、現在アクティブな次のウェイポイントはGRHで、 8時38分に到着予定、現在の機からそこまでの距離は32.5海里です。
-
旅客機操縦の探秘3.8 巡航での水平飛行へ
この時、航空機は東京北関東レーダーセンターの管轄を離れ、東北セクターへと入っていく。ボーイング777-200によるエア・システム115便を例に見てみよう。
離陸離陸後から16分が経過し、機体は栃木県の那須地方、NZE VOR上空に差し掛かった。
高度は39,000フィートに到達している。上図を見るとわかるように、機体は守谷SNEウェイポイントからR-NAV(エリア・ナビゲーション)のY11航空路へと入り、 この航空路に沿って一路北上し、北海道の千歳ウェイポイントまで続く。
この時、パイロットはATCから新しい連絡を受け、セクター間の引き継ぎ(ハンドオフ)が行われる: “Air System 115,Contact Tokyo 118.9”
これは、 “Air System 115便、東京东北区域(東北セクター)へ連絡せよ。周波数は118.9” という意味だ。
パイロットは復唱して、 “Tokyo Control 118.9,Air System 115”
これは、 “了解、東京区域118.9へ連絡します。Air System 115便” という意味。
それからパイロットは無線周波数を東北セクターの118.900MHzに切り替え、次のように呼び出す。 “Tokyo Control,Air System 115,Leaving 396 Climb 410”
これは、 “東京区域、こちらAir System 115。39,600フィートを通過中、41,000フィートへ上昇中” という意味だ。
東北セクターの管制官は機材の信号を確認し、 “Air System 115,Tokyo Control,Roger”
これは、 “Air System 115、こちら東京区域、了解” と応答する。
機体の高度は徐々に巡航高度に近づく。選択した高度からあと900フィート(ボーイング737の場合)に差し掛かると、 コックピットの高度警告システムから「ドン」という注意音が鳴り、琥珀色の高度警告灯「Altitude Alert」が点灯する。 パイロットに、もうすぐ巡航高度であることを知らせるのだ。 高度が選択高度からあと300フィートになると、警告灯は自動的に消灯する。
同様の高度警告は、水平飛行中に選択高度から300フィート以上ずれた場合にも作動する。
巡航高度に近づくと、飛行管理システム(FMS)は自動的にピッチ角を下げて調整を始める。 スロットル付近にある水平尾翼トリム(STAB TRIM)のコントロールホイールが再び自動的に前に回り、機体は徐々に水平飛行の姿勢に入っていく。
 PFD(プライマリ・フライト・ディスプレイ)を見ると、右側の垂直速度バーが中央の0に近づき、左側のスピードバーの速度値は大きくなっているのがわかる。
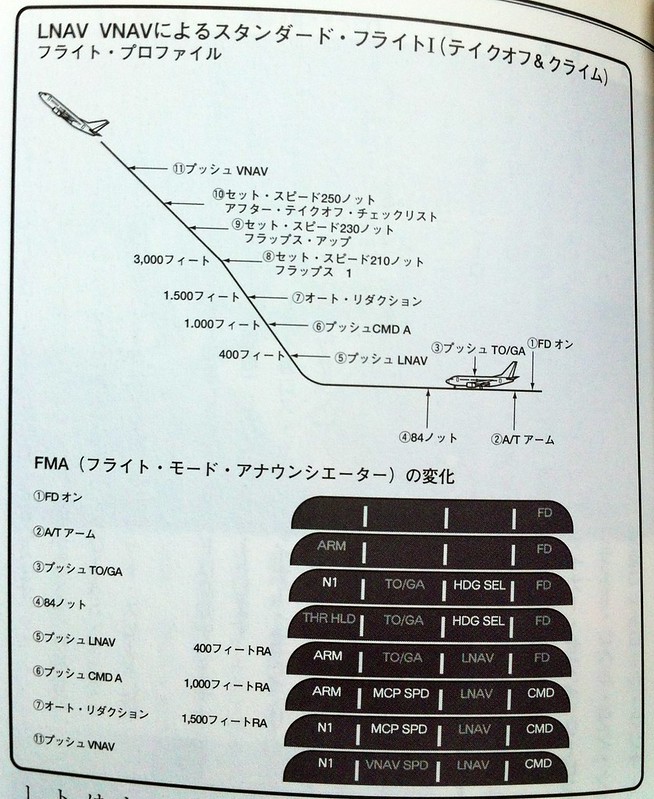
PFD(プライマリ・フライト・ディスプレイ)を見ると、右側の垂直速度バーが中央の0に近づき、左側のスピードバーの速度値は大きくなっているのがわかる。選択高度からあと100フィート(ボーイング737の場合)になると、 PFD左上のFMA(飛行モード信号栏)にあるピッチモード表示が、「VNAV SPD」から緑色の「ALT ACQ」モードへと変わる。 下図のフェーズ16の部分がそれだ。
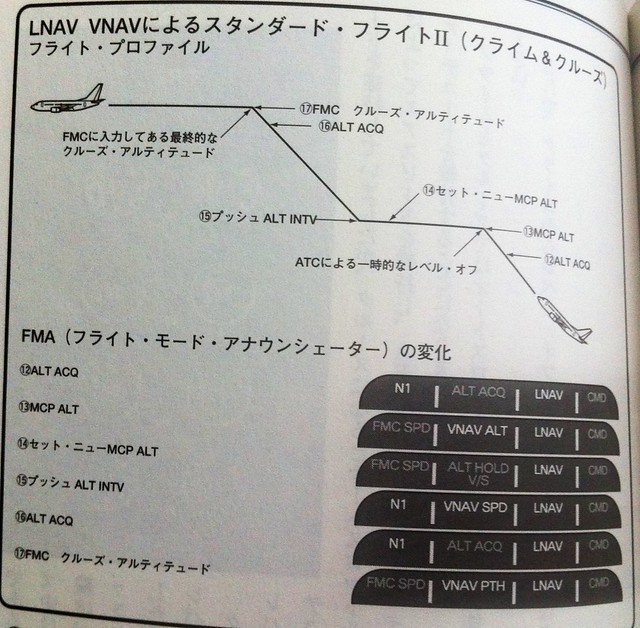
巡航高度に到達すると、機体は水平飛行に入り、FMAのスラストモード表示も変化する。N1モードから「FMC SPD」モードへ、 ピッチモードもALT ACQから「VNAV PTH」モードへと変わる。上図のフェーズ17の通りだ。
-
旅客機の操縦探検 3.7 ATCハンドオフ センターへの移行、上昇継続
まず、再び東京の羽田空港から北海道の新千歳空港へ向かうAirSystem115便を例に、出発から到着までの航空交通管制の流れを見てみましょう。
管制区の移行
-
羽田空港:
放行管制 → 地上管制 → 塔台管制 → 出発管制 -
区域管制:
東京区域管制区 → 札幌区域管制区 -
新千歳空港:
アプローチ管制 → 塔台管制 → 地上管制
飛行機は空港管制と区域管制の間で次々と異なる部署に引き継がれていきます。これはリレーのように飛行安全を保証する仕組みです。以下の2つの図をご覧ください。
左は出発空港内での管制:放行、地上、塔台、出発管制
右は到着空港内での管制:アプローチ、塔台、地上管制
日本の区域管制区
日本の区域管制区は以下のように細分化されており、それぞれがさらに小さな管制セクターに分かれています。
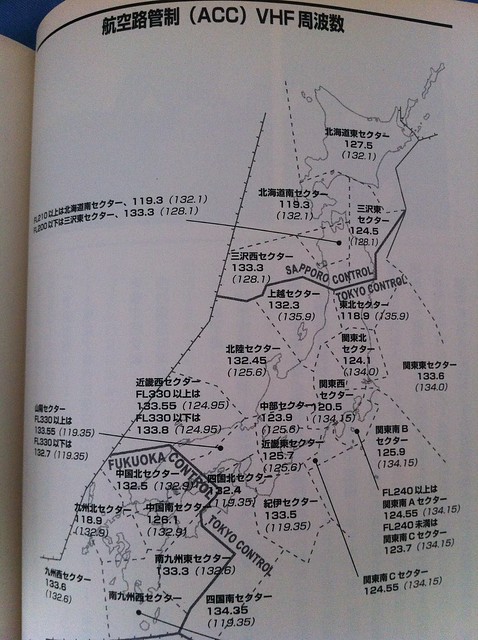
今回のフライトでは以下の5つのセクターを通過します:
- 東京管制区:関東西区、関東北区、東北区
- 札幌管制区:三沢東区、北海道東区
これらのセクターをリレー方式で通過し、最終的に札幌空港の管制区へ到達します。
管制との通信例
AirSystem115便は守谷ウェイポイント(Moriya)方向へ上昇中で、羽田空港の出発管制からパイロットへ指示が出ます。
管制官:“Air System 115, Contact Tokyo Control 124.1, Good day”
(エアシステム115、東京区域管制124.1へコンタクトせよ。グッデイ)副操縦士:“Tokyo 124.1, Air System 115, Good day”
(東京124.1、エアシステム115、グッデイ)その後、無線周波数を124.100MHzに切り替え、以下のように通信します。
副操縦士:“Tokyo Control,Air System 115,Leaving 7800 for FL210,Initially Proposed FL410”
(東京区域、エアシステム115。7800フィート通過中、21000フィートへ。最終目標高度41000フィート)管制官:“Air System 115, Tokyo Control, Roger, Cancel Restriction 上昇 and Maintain FL410”
(エアシステム115、東京空域。了解。上昇制限を解除し、41000フィートを維持せよ) -
-
旅客機操縦の探秘3.6 ATCハンドオフによりデパーチャ管制へ移行、VNAVモードへ突入
AirSystem115便を例に挙げます。航空機は羽田空港のMoriya 7番出発手順に従い、まず滑走路(16R)の方向へ飛行し、図の右下にあるKZE(KISARAZU木更津)ウェイポイントに到達した後、自動的に左に30度のバンクを入れ、14度の方角(ほぼ真北向き)で旋回してSNE(MORIYA守谷)ウェイポイントへ向かいます。
この時、塔の管制官は航空機の離陸が正常であることを確認した後、パイロットに対し出発管制への移行を指示します: “Air System 115,Contact Departure” これは “Air System 115、東京デパーチャー(離場管制)と交信せよ” という意味です。 副操縦士はこれを復唱し “Departure,Air System 115” すなわち “東京デパーチャーと交信します、Air System 115” と言った後、無線周波数を出発管制の120.800MHzに合わせ、次のように呼びかけます: “Tokyo Departure,Air System 115,Leaving 1800” これは “東京デパーチャー、Air System 115です、1800フィートを通過中” という意味です。 管制官は次のように答えます: “Air System 115,Tokyo Departure,Rader Contact,Turn Left Heading 020, Vector to Moriya, Climb and Maintain 210” これは以下の意味です: “Air System 115、東京デパーチャーです、レーダー捕捉。左旋回で針路020へ。Moriyaへのレーダー誘導。21,000フィートまで上昇し維持せよ” 副操縦士は復唱します: “Left 020,Direct 210,Air System 115” つまり “左旋回 針路020、21,000フィート維持、Air System 115"です。
上記の標準出発手順(SID)によると、MORIYAの前方11海里地点には高度制限があり、 13,000フィート(約3300メートル)以下を飛行しなければなりません。 しかし、ここで離場管制官はパイロットに対し、KZEウェイポイントを経由せずに直接旋回してMORIYAへ向かい、21,000フィートまで直ちに上昇することを許可しました。これはおそらく今日の交通量が少なかったからでしょう。 航空会社にとって、これは時間の節約にも燃料の節約にもなり、非常に好ましいことです。 そのため、パイロットはMCPのコースセレクトダイヤルを020に回しました。
現在、航空機の速度はMCP SPDモードになっているため、パイロットは速度設定を段階的に上げて、出しているフラップを徐々に格納する必要があります。 例えば、先ほどの737-500の場合、離陸時のフラップ設定は5度なので、パイロットはまず1度(Flap 1)まで格納することができます。 Flap 1の速度条件はV2+15ノット以上ですが、現在の上昇速度はすでにV2+20ノットに達しているので、1度まで格納しても問題ありません。 同時に、離陸後の手順も実行され始めます。オートブレーキのスイッチがRTOからOFFに切り替わります。
 ランディングギアのレバーもUP/OFF/ONの並びにおいて中間のOFF位置に移動し、エンジンスタートスイッチもCONTからOFFに設定されます。
速度はさらに上昇し続けているため、この段階でフラップを完全に格納しても問題ありません。737-500のフラップアップ時のマニューバー速度は210ノットです。約190ノットになった時点で機長は副操縦士にFlap UPを指示し、これにより前後縁のフラップが翼の中に完全に格納され、航空機は抗力が最も小さい状態になります。
ランディングギアのレバーもUP/OFF/ONの並びにおいて中間のOFF位置に移動し、エンジンスタートスイッチもCONTからOFFに設定されます。
速度はさらに上昇し続けているため、この段階でフラップを完全に格納しても問題ありません。737-500のフラップアップ時のマニューバー速度は210ノットです。約190ノットになった時点で機長は副操縦士にFlap UPを指示し、これにより前後縁のフラップが翼の中に完全に格納され、航空機は抗力が最も小さい状態になります。 -
旅客機の操縦を探る 3.5 オートパイロットの作動
機体は上昇を続け、無線高度計の数値が400フィート(旅客機操縦マニュアルの737-500を例にします)を超えました。 ここで水平ナビゲーション LNAVモードを入力できます。機長は副操縦士にMCPのLNAVボタンを押すよう指示します。

すると、PFDの左上のモード欄で、針路設定がHDG SELからLNAVに変わり、飛行モードは下図の第5段階に入ります。
LNAVはLateral Navigationの略称で、水平ナビゲーションを意味し、機体が事前に設定された航空路に沿って水平面上で自動飛行することを制御できます。 LNAVの原理は、まず慣性航法装置IRS(機上のレーザージャイロを用い、ドップラー効果から機体の加速度を得る)を利用し、 時間積分によって現在の速度と位置を算出します。その後、地上の無線ナビゲーション施設(VOR、DME、ILS/DME、VORTAC、TACANなど)またはGPSから得られる位置データと組み合わせ、 フライトマネジメントコンピュータFMCがこれらすべてのデータを統合します。つまり、FMCはIRSの誤差を各ナビゲーション施設のデータで絶えず修正し、機体が正しい航空路を飛行するよう制御します。
MCPでLNAVキーが押されると、PFD上のフライトディレクターFDはFMCの指示に従い、事前に設定された航空路に基づいてパイロットをナビゲートします。 パイロットはFDに従って機体を操縦すれば、横風があっても航空路から逸脱することはありません。 这是因为FMC会根据天气计算出风向修正角WCA(Wind Correction Angle),WCA也会被集成到飞行指令条FD上,所以飞行员驾驶时只要专注于FD就可以了。
与此同时,油门控制模式也发生了变化,绿色的THR HLD变为了白色的ARM, 也就是说飞机升到400英尺,并且离地18秒以后,发动机自动推力锁定模式就被解除, 发动机推力进入随着爬升高度而自动减少的状态。
飞机高度超过事先决定好的机场对地高度(比如1000英尺)以后,飞行员就可以打开自动驾驶模式A/P。 737上有两台自动驾驶仪,左边的为A,右边的为B,一般来说机长会指示副驾驶使用左侧,按下MCP中右侧的A/P ENGAGE 部分的CMD A键,
 于是飞行员的手就可以脱离操纵杆或操纵盘,飞机的各个舵面的控制就都交给计算机处理了。
于是飞行员的手就可以脱离操纵杆或操纵盘,飞机的各个舵面的控制就都交给计算机处理了。这样PFD上的左上方模式栏里自动驾驶设定由FD变为绿色的CMD,同时俯仰控制部分的模式也从TO/GA 变为MCP SPD,飞行模式进入下图中的第6阶段。
MCP SPD意味着现在飞机的速度将由MCP上中央处的IAS/MACH旋钮来控制,
而飞行员将会根据飞行中不同阶段不断调整这个速度。自动驾驶模式中,飞机忠实按照CDU中输入的航路,不断转弯向下一个航路点飞去。
超过气压高度1500英尺以后,推力模式自动从减推力起飞设定转变为爬升减推力, 飞机发动机的声音也比起刚才安静了一些。 PFD上的左上方模式栏里自动推力模式从白色的ARM变为绿色的N1模式,飞行模式进入下图中的第7阶段。
<a href=Prev: 收轮GEAR UP
TOC: 目录 <a href=Next: ATC移交离场管制,进入VNAV模式完
-
旅客機の操縦探秘3.4 ギアアップ
引き続き、旅客機操縦マニュアルにあるボーイング737-500の操作マニュアルに基づき、離地後の操作について解説します。
前のセクションで、機長はラダーペダルから足を離し、操縦桿(ヨーク)のみを使って機体のピッチとロール姿勢を制御すると触れました。
もしかすると、「左右のロール時に発生するアドバースヨー(逆偏流)は、ラダーペダルで制御する必要があるのではないか?」と疑問に思われるかもしれません。 「ターンコーディネーターのボールをセンターに合わせること(コール・ザ・ボール)は、とても重要ではないのか?」
アドバースヨーについてですが、操縦桿を左に動かして機体を左にバンクさせると、右側のエルロンは下がり、右翼の揚力が増加します。その結果、右翼の誘導抗力も増加します。 その結果、機体は右に偏航(ヨー)し、エルロン操作によって目指していた機首の方向とは逆の方向に動いてしまう現象が起きます。これがアドバースヨーです。 つまり、左に操縦桿を切って左バンクさせると、機首が右に向いてしまうのです。 この時、パイロットは方向舵(ラダー)を操作して、アドバースヨーの影響を打ち消す必要があります。
この質問ができるということは、あなたは本当のプロですよね。 確かに小型機ではラダー操作は不可欠ですが、現代の多くのジェット旅客機では、一般にヨーダンパーと呼ばれる装置が搭載されています。 ヨーダンパーのスイッチを入れておけば、飛行中、ヨーダンパーシステムのコンピューターがラダーに逆方向の指令を出し、針路の変動を比例的に抑制し、機首が向いている方向に進めることを保証します。
したがって、自動化された現代の旅客機では、パイロットはラダー操作に気を取られることなく、操縦桿操作に集中でき、それによって飛行の安全性が向上します。
機体の主脚も離地すると、PFDの右下にある無線高度計の数字が増え続け、右側の昇降計(垂直速度指示計)の針は上を指します。 気圧高度計の高度も同時に徐々に上がり、これが「ポジティブクライム(正の上昇率)」の条件を満たしたことを示します。 そこで、脚を格納(ギヤ・アップ)することができます。
 上の図は、無線高度計の伝統的な航空機と現代のグラスコックpit航空機の比較です。従来型の高度計は指针式のアナログ計器ですが、現代の航空機では高度値がPFDの右下、決心高度(DH)の下方にデジタル表示されます。
上の図は、無線高度計の伝統的な航空機と現代のグラスコックpit航空機の比較です。従来型の高度計は指针式のアナログ計器ですが、現代の航空機では高度値がPFDの右下、決心高度(DH)の下方にデジタル表示されます。
この時、機内の掛け声は以下の通りです: 副操縦士:Positive climb(上昇成立) 機長命令:Gear Up!(脚上げ) 副操縦士の命令復唱:Gear Up(脚上げ)し、正面のEICASと副操縦士側PFDの間にある脚レバーを引き上げ、Upポジションに移動させます。
 上の図は、ネット上の737NGのコックpit写真です。脚レバーの形状がよくわかります。
上の図は、ネット上の737NGのコックpit写真です。脚レバーの形状がよくわかります。
この時、「ブーン–」という音が聞こえ、油圧システムが作動して脚を胴体内に格納します。 油圧ポンプの稼働音に伴い、しばらくすると軽く「ドン」という音がして、わずかな振動を感じます。これは脚扉が閉まる音です。 「ブーン—」という油圧システム音が止んだ後、パイロットは計器盤上で脚が完全に格納された表示を確認することもできます。
常に機体外に出ていた脚が格納され、扉が閉まると、機体の空気抗力は一気に減少し、客席に座る乗客は、外の騒音がずっと静かになったことを明確に感じるでしょう。
滑走路での加速滑走から離地上昇、そして脚の格納まで、まだ30秒を経過していません。 早期に脚を引き込むのは、機体の抗力をできるだけ早く減らし、より早く上昇できるようにするためであり、また空港周辺の騒音汚染を減らすためでもあります。
 上の写真は私が東京国際空港(羽田)で撮影したものです。このボーイング737-800は刚刚離陸し、滑走路の上空で脚の引き込みを開始しているのがわかります。
上の写真は私が東京国際空港(羽田)で撮影したものです。このボーイング737-800は刚刚離陸し、滑走路の上空で脚の引き込みを開始しているのがわかります。
機体の飛行状態についてですが、この時はフライトディレクター(FD)モードになっており、コンピューターがV2+20ノットの速度を維持するために必要なピッチ角度を計算し、PFD内のFD指令バーに反映させています。 したがって、パイロットは操縦桿(ヨーク)を微調整し、FDの指示に忠実に従って操作するだけです。 フラップ格納高度(FRA:Flap Retraction Altitude)に達するまで、機体はV2+20ノットの速度で飛行し続けます。 同時に、フライト管理システムの制御表示装置(FMS/CDU)のページタイトル表示も、自動的にエコノミークライム(経済上昇)モード「ACT ECON CLB」に切り替わります。 ここまで来て、離陸の操作はようやく完全に終了したことになります。
Prev: 起飛離地 TOC: 目次 Next: オートパイロットの作動
完
-
旅客機の操縦探秘3.3 離陸昇空
航空機の速度が増加し続けると、PFDの左側の速度帯に「speed trend vector」と呼ばれる緑色の矢印が現れます。
 これは現在の航空機の加速度を示しており、矢印が上向きは加速状態、下向きは減速状態を表しています。
矢印が指し示す速度は、10秒後の航空機の速度予測値です。
パイロットはこのspeed trend vectorを観察することで、将来の速度の趋向を知ることができ、これは特に離陸と着陸の段階において運航に非常に役立ちます。
これは現在の航空機の加速度を示しており、矢印が上向きは加速状態、下向きは減速状態を表しています。
矢印が指し示す速度は、10秒後の航空機の速度予測値です。
パイロットはこのspeed trend vectorを観察することで、将来の速度の趋向を知ることができ、これは特に離陸と着陸の段階において運航に非常に役立ちます。航空機の速度が45ノットを超えると、speed trendの矢印が急速に上昇し、機体の速度はますます速くなります。 加速度はV1速度に達した時点で最大値となります。
航空機がFD(フライトディレクター)モードにあるため、PFD中央の自機記号の上に紫色のFD指令バーが表示されます。 これは、設定された速度、高度、針路を達成するために、フライトコンピュータが計算した現在の機体がとるべき姿勢を指示するものです。 パイロットはFD指令バーの表示に従って、操縦桿またはスロットルを操作して機首を上げ下げしたり、左右に旋回させたりして、機体を指令バーに合わせます。そうすれば、機体はフライトプランに忠実に従って航行します。 下図はボーイング737のPFD表示の概略図です。紫色の逆さV字のようなマークがFD指令バー(flight director command bar)で、その下の白い逆V字のマークが自機を表します。下図では、パイロットは機首を上げて+8度の姿勢をとる操作を行う必要があります。
 一方、エアバス機の表示は以下の通りです。Flight Path Director (FPD)ラインはコンピュータが出した指令を表し、Flight Path Vector (FPV)は航空機の現在位置ベクトルを示します。パイロットはFPVがFPDの中心にくるように機体を操作します。
一方、エアバス機の表示は以下の通りです。Flight Path Director (FPD)ラインはコンピュータが出した指令を表し、Flight Path Vector (FPV)は航空機の現在位置ベクトルを示します。パイロットはFPVがFPDの中心にくるように機体を操作します。
 航空機の操縦は、まるでビデオゲームのようだと感じるかもしれませんか?もちろん、事はそれほど単純ではありません。様々なセンサーやシステムの故障により、コンピュータが誤った指示を出す可能性があるため、パイロットは常に各種計器を監視し、コンピュータの発する指示が正しいかどうかを確認し、分析なしにコンピュータの指示を盲目的に実行してはなりません。
航空機の操縦は、まるでビデオゲームのようだと感じるかもしれませんか?もちろん、事はそれほど単純ではありません。様々なセンサーやシステムの故障により、コンピュータが誤った指示を出す可能性があるため、パイロットは常に各種計器を監視し、コンピュータの発する指示が正しいかどうかを確認し、分析なしにコンピュータの指示を盲目的に実行してはなりません。地上滑走段階では、コンピュータのピッチ指示は常に水平-10度の位置に留まりますが、速度が60ノットに達すると、FD指令バーは+15度の位置に移動します。しかし、まだVrに達していないため、この時点ではまだ操縦桿を引いて機首を上げることはできません。
速度が80ノットに達すると、常に計器を観察している副操縦士は「80」と報告し、機長は左手で操縦桿を前に軽く押し付け、両足でラダーペダルを操作して航空機を滑走路の中央に維持し続けます。ラダーペダルは前輪を左右7度(ボーイング737の数値)転回させるように制御できるため、離陸と着陸の段階での方向の微調整にはラダーペダルで十分です。地上ではコンピュータも水平方向の指示を出すことができないため、機長は目視で滑走路のセンターラインを確認し、現在の航空機が逸脱していないかを観察し、絶えず方向を修正する必要があります。
対地速度が84ノットに達すると、PFD上のモード表示は「THR HLD、TO/GA、HDG SEL」に変化します(下図の4)。
THR HLDはエンジンの自動推力値がロックされたことを示しており、エンジンはこのスラスト推力で航空機が離陸して18秒後、または地上高度400フィートに達するまで飛行し続け、その後でようやく推力の変更が許可されます。THR HLDは、離陸段階でエンジンが何らかの特別な原因により急にスロットルを減少させるのを防ぎ、航空機の安全性を保証します。航空機は加速を続け、離陸決断速度V1に達すると、副操縦士は引き続き「V1」と報告します。発音の規則では、速度表示がV1のあと5ノットになった時に発音を開始し、発音が終わるまでには速度表示がちょうどV1になるようにすると言われています。 V1に達した後、航空機に故障が発生しても停止してはならず、離陸動作を完了し続けなければなりません。したがって、副操縦士の報告を聞いた後、機長はずっとエンジンスラストレバーに置いていた右手を操縦桿に移し、両手で航空機の離陸操作を開始するか、アームレストに置きます。(それまでは、万一の事故が発生した際にいつでもエンジンを停止できるように、機長は右手をスラストレバーに置いておく必要があります。V1後は誤操作を防ぐため、右手を離すことで安全性を高めることができます。)
間もなく、機首引き起こし速度Vrが到来します。副操縦士は引き続き「Vr」と報告します。機長は実際にはこの時も計器を見ており、副操縦士の報告を待ってから操作を行うのではなく、航空機がVr速度に達した瞬間、すなわち副操縦士がVrを報告すると同時に、操縦桿を後ろに引いて機首を引き起こし、機体を每秒約3度の割合で上げて、PFD内のFD指示バーの+15度の位置に引き上げます。この動作のタイミングは離陸滑走距離に大きな影響を与えるため、少しでも遅れると地上滑走距離が増大するため、ここでのパイロットの操作は可能な限りVrと同時に行う必要があります。
 タイ国際航空のボーイング777が前脚が地を離れる瞬間。上の写真は私が日本の名古屋中部国際空港で撮影しました。
私は以前、Weiboで777-300ERを運航されている<a href=“http://weibo.com/kingoftheair"中国国際航空機長の砍砍而弹さんにVrについて尋ねたことがありますが、彼は満トー離陸の時、その速度は180ノットに近いと教えてくれました。
タイ国際航空のボーイング777が前脚が地を離れる瞬間。上の写真は私が日本の名古屋中部国際空港で撮影しました。
私は以前、Weiboで777-300ERを運航されている<a href=“http://weibo.com/kingoftheair"中国国際航空機長の砍砍而弹さんにVrについて尋ねたことがありますが、彼は満トー離陸の時、その速度は180ノットに近いと教えてくれました。機長は機体の機首上げ姿勢を維持し、FD指示バーと一致させるよう保ち、すぐにV2速度に達し、副操縦士は再び「V2」と報告します。この時、航空機の姿勢は機首上げ15度のピッチ角であり、先ほどまで滑走路を滑走していた胴体下の主脚も離陸して浮き上がります。
 機長の両足もラダーペダルを離れることができ、この後の操作は主に操縦桿またはサイドスティックに頼り、FD指示の方向に従って、上下左右に滑らかに航空機を操縦します。
機長の両足もラダーペダルを離れることができ、この後の操作は主に操縦桿またはサイドスティックに頼り、FD指示の方向に従って、上下左右に滑らかに航空機を操縦します。
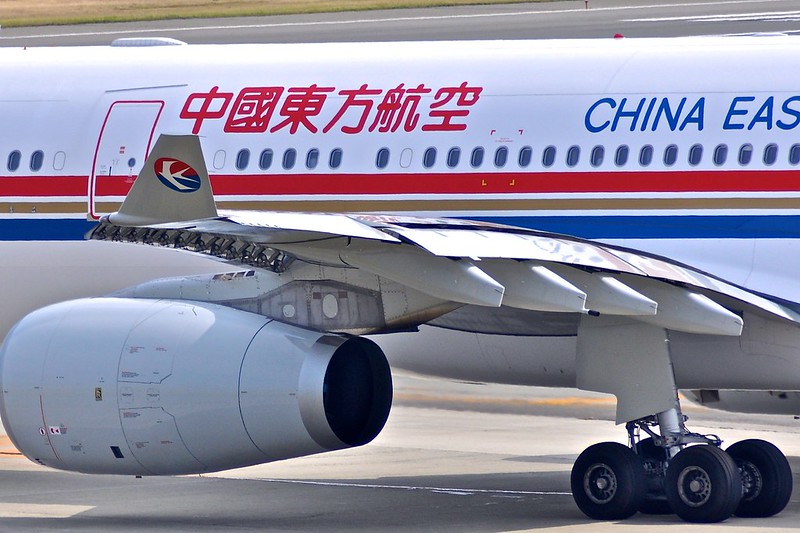
 中国東方航空のエアバスA330-200が離陸して地を離れる瞬間。上の写真は私が日本の関西国際空港で撮影しました。
中国東方航空のエアバスA330-200が離陸して地を離れる瞬間。上の写真は私が日本の関西国際空港で撮影しました。航空機の離陸と着陸の過程において、飛行安全に最も大きな影響を与える外的要因の一つは横風です。 横風は航空機の航跡を滑走路の中心線から逸脱させ、風ウィンドシア(すなわち水平および垂直方向の風速の急激な変化、Wind shear)が発生した場合、深刻な時には航空機が滑走路をオーバーランし、機体が大破し、人命が失われる重大事故につながる可能性があります。 風ウィンドシアによる有名な事故には以下のようなものがあります: 1985年、アメリカン航空191便がダラス・フォートワース国際空港で墜落し、137人が死亡。 2001年、アメリカン航空587便が空中で突然失速し、ニューヨークの住宅地に突っ込み、265人が死亡。 2009年3月23日、フェデックス80便が日本の成田国際空港で着陸際、風ウィンドシアにより墜落し、2名のパイロットが死亡した。 したがって、パイロットは航空機の針路を横風に対してある角度向けに調整し、航空機が滑走路の中心線から逸脱しないようにする必要があります。 横風の風速が一定の速度を超えると、離着陸はできません。
-
旅客機の操縦探検3.2 離陸滑走
当日の天候や交通状況に基づいて離陸方式を決定した後、いよいよ正式な離陸滑走(テイクオフロール)の段階に入ります。 機長は左手を操縦輪(スティック)に移し、右手は引き続きエンジンスロットルレバーに置いておきます。 (ボーイング機では操縦輪(ヨーク)を使用しますが、エアバス機ではサイドスティックを使用し、その位置はパイロットの外側になります。下图の通りです。

 )
)この時、もし風がある場合は、操縦輪を風上側にわずかに傾けます。 離陸中、風の影響で機体が風下側に逸れる傾向があるため、 針路を維持するために、パイロットはあらかじめエルロンを逆方向に調整しておく必要があります。 操縦輪の操作は必ず丁寧に行うように注意してください。感覚的には、高速道路で自動車を直進させる際の左右の微調整操作に似ています。
機体が滑走路のセンターラインに合った後、機長はPFD上のV1、Vr、V2速度の表示を再確認します。
 NDの地図モードでは航空路とウェイポイントの表示が正常で、CDUはECON CLIMBページに設定されています。
副操縦士側のCDUはROUTE LEGSページに設定されています。
NDの地図モードでは航空路とウェイポイントの表示が正常で、CDUはECON CLIMBページに設定されています。
副操縦士側のCDUはROUTE LEGSページに設定されています。

次に機長はMCP左側上部のA/T(自動推力)スイッチをARM側に切り替えます。これにより推力システムはコンピュータ制御モードに入ります。 離陸、上昇、巡航、降下、着陸までの全プロセスは基本的にフライトコンピュータFMCによる自動操作で、エンジン回転数N1の限界値もFMCによって制御されます。同時にPFDの左上のモード欄に"ARM"の文字が表示されます(下图の2)
モード欄の各項目の定義については下图を参照してください

両パイロットがARMモードを確認・照合した後、NDの針路設定が滑走路の方向に正しく対しているか再確認します。 機長は右手で滑らかにスロットルレバーを押し込み、回転数N1が40%の位置まで前進させます(通常の離陸方法を例にすると、40%の位置は隣のフラップ5の位置とほぼ同じです)。 そしてエンジンの状態を観察し、左右のエンジン推力が安定していることを確認した後、機長は右手の人差し指でスロットルレバー上部にある黒いTO/GAボタン(ボーイング機)を押すか、スロットルをTO/GA位置(エアバス機)まで押し込みます。 TO/GAはTake Off/Go Around、つまり離陸/復飛(ゴーアラウンド)時の自動推力装置を意味します。ボーイング機でTO/GAボタンが押されると、スロットルレバーは自動的に前方に移動し、FMCが計算した最適なスロットル位置で停止します(下图)。そのため、パイロットは計器を見てエンジンスロットルの設定を知るだけでなく、スロットルレバーの位置を直接見て現在の設定を直感的に把握することもできます。
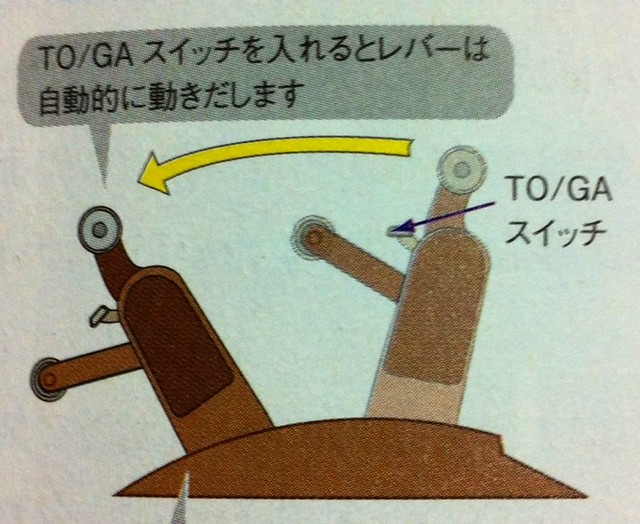
一方、エアバス機の推力装置はボーイングの設計とは大きく異なります。スロットルがFLXまたはTOGAのノッチに設定されると、スラストレバーはその位置に留まったまま変わりませんが、実際の推力(油門)はコンピュータの自動制御に従って増加し続け、離陸に必要な推力に達します。(下图)
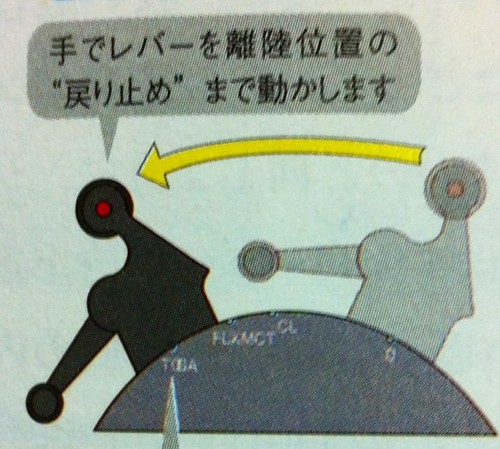 上图を見るとわかるように、エアバス機の推力は"0(アイドル)"、“CL(上昇)"、“FLX(フレキシble)/MCT(最大連続推力)"、および"TOGA(離陸復飛)“のいくつかの固定段階で構成されています。
上图を見るとわかるように、エアバス機の推力は"0(アイドル)"、“CL(上昇)"、“FLX(フレキシble)/MCT(最大連続推力)"、および"TOGA(離陸復飛)“のいくつかの固定段階で構成されています。ボーイング737を例に続けると、この時PFD上のモード表示は"N1、TO/GA、HDG SEL"に変化します(下图の3)
つまり「自動スロットル推力、離陸推力、自動針路」モードとなります。エンジンの轟音は高まり続け、機体は前方へ滑走し、まもなく現在の速度がPFD左側の速度バーの四角い枠内に表示されます。
副操縦士はエンジン油圧が黄色の正常範囲内にあるか注意深く監視し、機長は操縦輪を少し前に倒して、水平尾翼に作用する力によって速度不足時に機体が早期に頭を上げるのを防ぎます。この時、すぐにV1速度に接近しようとしています。
<a href=Prev: 3种起飞方式 TOC: 目录 <a href=Next: 起飞离地
完
-
旅客機の操縦席探訪3.1 3つの離陸方法
一般に、航空機には3種類の離陸方法があります。ここでは簡単に紹介します。
Normal Takeoff Method 通常離陸方式 航空機は滑走路に停止し、機首をセンターラインに正対させた状態でブレーキをかけ、スロットルレバーを前方へ押してN1 40%の位置にします。エンジンの安定運転を確認した後、ブレーキを解除すると航空機は滑走を開始し、対気速度が60ノットに達したら離陸推力に設定します。
この方式は、主にクロスウィンド(風斜め)/湿った滑走路/氷雪が積もり滑りやすい滑走路などの状況で使用されます。この場合、機首の方位を維持することが特に重要であるため、滑走路に正対してから推力を増加させるこの方法が、方向維持に有利です。 また、航空機の性能諸元における離陸滑走距離も、この離陸方式のデータを指しています。
Rolling Takeoff Method ローリング離陸方式 航空機が滑走路へ旋回して進入した後、停止せず、あるいは停止してもブレーキを解除することなく、スロットルレバーを前方へ押してN1 40%の位置にします。エンジンの安定運転を確認し、対気速度が60ノットに達したら離陸推力に設定します。
この方式の利点は、滑走時間を短縮できることです。同時に、航空機の移動速度の変化が比較的穏やかなため、乗客の不快感が比較的少なくなります。しかし、クロスウィンドや湿った/滑りやすい滑走路の条件下では、この離陸方式はあまり適していないことに注意が必要です。 また、この方式は滑走路距離を長く消費する傾向があり、特殊な条件下(例えば、各エンジンの加速性能が不一致で安定状態に達するまでに時間がかかる場合や、滑走路路面が滑りやすい場合など)では、機首方位を維持する操作により慎重を期す必要があり、パイロットに対する要求も高くなります。
Static Takeoff Method 静止離陸方式 航空機は滑走路に停止し、機首をセンターラインに正対させた状態でブレーキをかけ、直接離陸推力に設定します。エンジンの安定運転を確認した後、ブレーキを解除します。この方式の利点は、離陸滑走距離が最短になること、および方向維持が比較的容易なことですが、滑りやすい滑走路では操作を誤ると滑走路オーバーランの危険があります。同時に、相対的に騒音が大きく、加減速度も大きいため、乗客はより多くの不快感を覚えることになります。さらに、エンジン回転数が大きいため、異物を吸い込みやすく、エンジン損傷の原因となりやすくなります。
なぜ、すべての離陸方式において、エンジンが安定してから離陸推力を設定するのですか? それは、ジェットエンジンには「軽量で大出力」という利点がある一方で、「騒音が大きいこと」と「回転数を迅速に上げられないこと」という欠点も明白だからです。特に大型のターボファンエンジンでは、スロットルを急いで押しすぎると異常燃焼を引き起こす原因になります。また、後述する各エンジンの加速性の違いにより、すべてのエンジンの推力が安定するのを待たずに離陸推力を設定すると、航空機がバランスを失い、滑走路をオーバーランする危険があります。
次に、航空機が誘導路から滑走路へ旋回する際の注意点について紹介します。下の図(筆者が関西国際空港で撮影)のように、地上には黄色い曲線が引かれており、航空機の滑走経路を示し、滑走路のセンターラインまでつながっています。
 直線滑走と同じように、前輪がこの曲線に沿って進めば、滑走路センターに乗り込めると思うなら、それは大間違いです。
直線滑走と同じように、前輪がこの曲線に沿って進めば、滑走路センターに乗り込めると思うなら、それは大間違いです。なぜなら、この黄色い曲線は、機体の中心をこの線上に保って移動させれば、主翼や various 地上設備との安全距離が確保できることを示しているからです。もし本当にこの線に沿って離陸しようとすれば、航空機は数十メートルもの滑走距離を損失してしまう可能性があります。
 <a href=“https://yinlei.org/x-plane10/2012/07/22/%E3%83%94%E3%82%AF%E3%83%81%E3%83%A3%204.png"
<a href=“https://yinlei.org/x-plane10/2012/07/22/%E3%83%94%E3%82%AF%E3%83%81%E3%83%A3%204.png"
 上の写真にあるボーイング787が滑走路へ旋回する際、前輪がセンターラインを越えてから旋回し、方向修正を行っている瞬間が見て取れます。
この写真は筆者が大阪国際空港(伊丹)の滑走路32L頭の外で撮影したものです。
上の写真にあるボーイング787が滑走路へ旋回する際、前輪がセンターラインを越えてから旋回し、方向修正を行っている瞬間が見て取れます。
この写真は筆者が大阪国際空港(伊丹)の滑走路32L頭の外で撮影したものです。
離陸の過程で、航空機が速度V1に達する前に予期せぬ事態が発生した場合は、離陸を中止する必要があります。高速の航空機に対して急ブレーキを行い、滑走路内で停止させるため、この時の100メートルという距離は非常に貴重になります。パイロットは滑走路へ旋回して乗り入れる際、慎重にできるだけ滑走路の最後部に近づき、最長の距離を確保して離陸滑走を行おうとします。したがって、旋回時、パイロットは通常、速度が10ノット以下であることを条件に、地上の黄色い曲線を無視し、90度のターンを完了するように操作します。ボーイング737を例にすると、パイロットは操縦輪(ノーズホイール・ステアリング)を操作して旋回する際、通常、滑走路のセンター線を5メートル過ぎたあたりから転換を始め、しっかりとホールドして前輪が左右にふらつかないようにします。また、機長は機体の左側に座っているため、機長席の視線角度では、滑走路の中心より少し左の位置に合わせれば、飛行機は概ね滑走路の中心に正対していることになります。
<a href=Prev: 離陸許可 TOC: 目次 <a href=Next: 離陸操作
完
-
旅客機の操縦探秘 2.7 離陸許可
飛行機の誘導から出発前まで
飛行機が地上を移動(誘導)している間、副操縦士は通信周波数を塔(タワー)に合わせ、管制官とコンタクトを取ります。
“Tokyo Tower, Air System 115, with you”
これは、 “東京タワー、こちらは Air System 115 です” という意味です。
これに対し塔の管制官は、 “Air System 115, Tokyo Tower, Number 2” と応じます。 つまり、 “Air System 115、東京タワーです。離陸順位は2番です” ということです。
そこで副操縦士は復唱して、 “Number 2” と答えます。
客室内では、客室乗務員が乗客の離陸準備が整ったことを確認すると、内線電話で操縦席に連絡を入れます。操縦席には「ピン」という通知音が鳴り、パイロットの頭上のパネルにある CALL ライトが点灯します。
飛行機が徐々に滑走路の入り口に近づくと、管制官は次のような指示を出します。
“Air System 115,Taxi to Holding Position,Runway 16R”
これは、 “Air System 115、滑走路16Rの進入待機位置(ホールディングポジション)まで誘導せよ” (つまり、管制許可がない限り絶対に滑走路に入ってはいけないという意味です) ということです。
そこで副操縦士は、 “Taxi to Holding Position, Runway 16R,Air System 115” と復唱します。 つまり、 “滑走路16Rの待機位置へ向かいます、Air System 115” です。
機長は飛行機を滑走路の入り口付近で停止させます。もし先行機が離陸済みで、かつ同じ滑走路に他の着陸機がいなければ、塔から離陸許可が通知されます。
“Air System 115,Fly Runway Heading, Wind 190 at 19, Cleared for Takeoff, Runway 16R”
-
旅客機の操縦を探る 2.6 フラップについて
前のセクションでは、離陸前にあらかじめフラップを離陸位置に設定しておくことを紹介しましたが、これはなぜでしょうか?
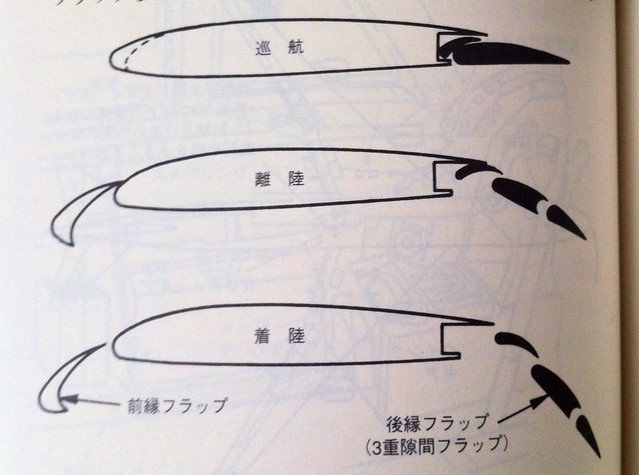
まず、フラップは翼の後縁または前縁に取り付けられ、下方へ偏向したり、(あるいは)後ろ(前)へスライドして、揚力を増加させるための翼状の装置です。取り付けられる位置と具体的な役割の違いに基づいて、フラップは後縁フラップと前縁フラップに分類されます。
一般的に後縁フラップには一つの欠点があります。それは、それが下に偏向するとき、翼上面の気流の流速を増大させて揚力係数を増加させることができますが、同時に翼の前縁における気流の局部迎え角も増加させてしまうことです。航空機が大きな迎え角で飛行する場合、翼の前縁上部での局部的な気流の剥離を引き起こしやすく、航空機の性能を悪化させる原因となります。もしこの時に前縁フラップを採用すれば、翼の前縁上部の局部的な気流の剥離を解消するだけでなく、後縁フラップの揚力増加効果を改善し、かつそれ自体にも揚力増加の作用があります。
以前はフラップの設定はタキシング中に行われていたそうですが、タキシング中はパイロットは管制と通信しなければならず、周囲の交通にも注意を払う必要があるため、非常に忙しく、フラップの設定を忘れがちでした。そのため、現在のフライトマニュアルでは、タキシングを開始する前にフラップを設定することが規定されています。
フラップの使用は主に離陸と着陸時です。飛行機に乗っていると、乗客はよく「ガーガー」という機械的な作動音に気づきます。一般的に、これが翼からフラップが伸びるときの音です。 上の図のように、通常の巡航時や地上に停泊しているとき、フラップは翼の中に格納されており、離陸と着陸で必要なときだけ伸びます。離陸や着陸時は相対的に飛行機の速度は遅く、この時必要な揚力はより大きくなるため、フラップが伸びる角度も深くなります。
フラップの設定位置は型式ごとに異なります。例えば、エアバスA330には5つの位置(0、1、2、3、FULL)があり、ボーイング777には6つの位置(1度、5度、15度、20度、25度、30度)があります。フラップという装置は非常に重く、体積も大きいため、素早く一気に完全に伸出させることは不可能です。そのため、実際の操作では、航空機の総重量と滑走路の長さに基づいて、必要な位置を設定し、迅速かつ経済的に離着陸動作を完了する必要があります。一般的に、エアバスA330の1、2、3位置は離陸に使用され、3とFULL位置は着陸に使用されます。ボーイング777の15と20位置は離陸に使用され、25と30位置は着陸に使用されます。
下の図はボーイング777のフラップ設定レバーで、位置はエンジンの推力レバーの右側にあり、6つの位置に角度値が記載されています。

フラップの実際の外観を見てみましょう。 下の写真は関西国際空港で撮影したものですが、離陸準備のために地上を滑走している中国東方航空のエアバスA330-200が、前後のフラップを下げているのがわかります。また、下げている角度は比較的浅く、おそらく10度前後でしょう。
前縁フラップが下りた様子は、下の写真の角度から見ると比較的識別しやすいです。
 これはカソードパシフィックのボーイング777で、同じく関西国際空港で撮影しました。
これはカソードパシフィックのボーイング777で、同じく関西国際空港で撮影しました。以下は広島空港で撮影したボーイング737-800で、離陸時に脚が地面を離れた瞬間のものです。フラップが浅く2段に伸びているのがわかります。

比較のために、関西空港で同日に撮影した別の着陸時の航空機を見てみましょう。機種は中国東方航空のボーイング737-700です。そのフラップの下げ角度は、上記の航空機の角度よりも明らかに深く、およそ30度程度あります。
上の2枚の写真は横から見たフラップです。角度を変えて見てみましょう。下は伊丹空港で撮影した、着陸しようとしている全日本空輸のボーイング777-200型機です。 真正面から見ると、後縁フラップが伸出した後の面積は非常に大きいため、航空機が低速状態でも飛行を継続するための十分な揚力が保証されています。
 下は真後ろから見たフラップです。その伸出角度の深さが明確にわかり、垂直に近い角度で下ろされている感覚があります。
下は真後ろから見たフラップです。その伸出角度の深さが明確にわかり、垂直に近い角度で下ろされている感覚があります。

ボーイング747のフラップは3段構造で、777よりもさらに長いです。これはドリームリフターが着陸して刚刚接地した時の写真で、その伸出面積の大きさがわかります。この写真は名古屋中部国際空港で撮影されました。

<a href=Prev: 地面滑行中的操作 TOC: 目录 <a href=Next: 起飞许可
完
-
旅客機操縦探秘 2.5 地上滑行時の操作 Taxi
地上での滑行操作、特に機体の旋回や飛行操縦面のチェックについて解説します。
地上で機体を旋回させる際は、ラダーペダル(足方向舵)とティラー(Tiller、操向ハンドル)を併用します。これらの操作装置は油圧システムを通じて前輪のステアリングを制御します。ボーイング747や777、エアバスA380などの大型機では、後輪にもステアリング機構が装備されていることがあります。
「フライト前手順」の節で、ラダーペダルは垂直尾翼にある方向舵を操作し、空中での旋回を行うために使うと紹介しましたが、実はこれと同時に前輪の転舵も制御できます。したがって、地上でラダーペダルを踏むことでも機体を曲げることができます。しかし、ラダーペダルによる制御では、機体は非常に小さい角度でのみ緩やかに曲がる、つまり非常に大きな半径での旋回しかできません。実際の空港では90度のターンが頻繁に求められるため、ラダーペダルだけではまったく不十分であり、ティラーを使用する必要があります。
ティラーはコックピットの外側にあり、回転できる黒いハンドルです。以下の写真をご覧ください。 (これはボーイング737-800の写真です。提供元のberqiang氏に感謝します。出典はこちら。 エアバスのティラーは形状が少し異なりますが、手元に良い写真がありません) パイロットはこれを回すことで60~80度の急旋回を行うことができます。そのため、狭い滑走路や誘導路でも、幅数十メートルの巨大な機体が数十メートルの旋回半径で、次々と直角のカドを曲がることができるのです。例えば、全長74メートルのボーイング777-300の旋回半径はわずか56メートルです。ティラーを使い始めるときは、必ずゆっくりと回すように注意してください。巨大な旅客機で急ハンドルを切ると、乗客はジェットコースターに乗っているかのように左右に揺さぶられ、シートベルトを締めていないと怪我をする恐れがあります。
エアバスのティラーは位置や形状が少し異なり、操縦桿(サイドスティック)と同じ平面上にあります。 拡大するとこのようになります:
また、ラダーペダルの上部(つま先部分)を踏むと、前輪のブレーキが作動します。左のブレーキだけを踏めば左の車輪だけ、右だけを踏めば右の車輪だけに効きます。したがって、旋回時に片側のブレーキを使うことで、機体はよりスムーズに曲がります。この時に外側のエンジンの推力を上げれば、さらに旋回半径を小さくすることができます。ただし、最近は燃料価格の高騰により、燃費を優先して、片側エンジンの推力を上げるという「奥の手」は使わないのが一般的だそうです。
誘導路の中央には黄色のセンターラインが引かれており、パイロットは前輪をこのセンターラインに乗せて慎重に進む必要があります。一部の大型機では、機体が高すぎて前輪の位置が見えないため、前脚にカメラが装備されています。パイロットはコックピット内のモニターで確認しながら、より安全に滑行操作を行います。夜間には、センターライン上に緑色の灯火、誘導路の両側には青色の灯火が点灯し、パイロットを誘導します。
ボーイング747-400のような大型機では、コックピットに座っているパイロットの視点は地上約10メートル、つまり4階建ての建物の窓から見下ろすような高さになります。そのため、自動車を運転するような速度感が持ちにくいのです。そのため、パイロットは主にND(ナビゲーションディスプレイ)の対気速度計の表示を見ながら、推力を調整します。
地上滑行中、パイロットは各飛行操縦面のチェックも行います。操縦桿(ボーイング機)またはサイドスティック(エアバス機)を左右に動かしてエルロンの動作を確認し、操縦桿を前後に押したり引いたりしてエレベーターなどをチェックします。コックピット内は視野が限られているため、後方の舵面の動きを直接見ることはできません。そのため、システムディスプレイ(SD)の表示を観察してチェックを行います。ラダーペダルで方向舵を操作するチェックをする際、前脚のステアリングと方向舵は連動しているため、機体が誘導路上で蛇行しないように、パイロットはティラーをしっかりと掴んでおく必要があります。これは、ティラーの方がラダーペダルよりも操作の優先度が高く、同時に操作された場合、ラダーペダルの操作はティラーによって上書きされるためです。
各操縦面について、民航資源網のこのページにある図が分かりやすいので、引用させていただきます。この分野に馴染みのない方の参考になれば幸いです。
飛行機は、ジェットエンジンが後方に排気することで前進する力を得ており、自動車のように動力が直接車輪に伝わるわけではありません。したがって、滑行速度はエンジンの推力とブレーキのみで調整することになります。空港の地面が必ずしも平坦ではないため、上り勾配の誘導路では速度を維持するために推力を増やし、下り勾配ではアイドリングを落とし、ブレーキを使って速度を落とす必要があります。
一般的に、晴れて乾燥した滑走路では、航空機の滑行速度は25ノット(約50km/h未満)です。雨や雪の天候で滑走路が滑りやすい場合は速度を落とす必要があり、特に旋回時には減速に注意が必要です。
また、ブレーキで速度を制御する際、ブレーキを踏みっぱなしにしないように注意してください。そうするとブレーキディスク内の温度が上昇し続け、ブレーキの効きが悪くなります。そのため、速度が落ちたらブレーキを緩める必要があります。
誘導路上に多くの航空機が並んでいる際、パイロットは前方の機体に接近しすぎないよう注意します。風が正面から吹いている場合、前方の機体の排気ガスが自機の客室に吸い込まれる可能性があり、異臭を伴う空気は乗客の不快感を招く原因になります。
滑行中、地上管制員から指示が送られてくることがあります。例えば、管制周波数を塔(Tower)に切り替えるよう指示するものです。 “Air System 115, contact tower 118.1” これは、 “Air System 115, 塔(118.1)へ連絡せよ” という意味です。そこで副操縦士は復唱します: “Air System 115, 118.1” そして、無線機の周波数を118.1MHzに切り替えます。
客舱内では、客室乗務員も安全デモンストレーションを終え、乗客にテーブルを格納し、シートベルトを締め、背もたれを起こすよう呼びかけ、離陸前の安全準備を完了させます。
地上滑行中、機長は左手でティラーを操作し、右手でスロットルレバーを制御し、両足でラダーペダルを操作します。目は常に様々な計器をスキャンし、時折窓外の交通状況を確認し、耳は常に交通管制の指示に注意を払います。同時に、滑行および離陸チェックリスト(ボーイング737-500の場合、この時点で破線より上の部分を完了)を遂行し、 機体を安全に前進させ、徐々に離陸用滑走路の前方へと移動します。
[Prev: 地面滑行线路] [TOC: 目录] [Next: 关于襟翼]
完
-
旅客機操縦探秘 2.4 地上滑走経路 Taxi
飛行機はトーイングカーによってエプロンの端まで押され、整備員が再びコックピットと通信します: 整備員:「コックピット、パーキングブレーキをセットしてください」 機長:「ブレーキ設定完了」
そこで整備員はトーイングバーを前脚から外し、再び輪止め(chock)を設置し、 トーイングカーが機体から離れます。 (上の写真は名古屋中部国際空港で撮影)
副操縦士はEICASを監視し、左右のエンジンの稼働が安定していることを確認して機長に報告した後、(ボーイング737-500を例に)始動後チェックリストを実行します。
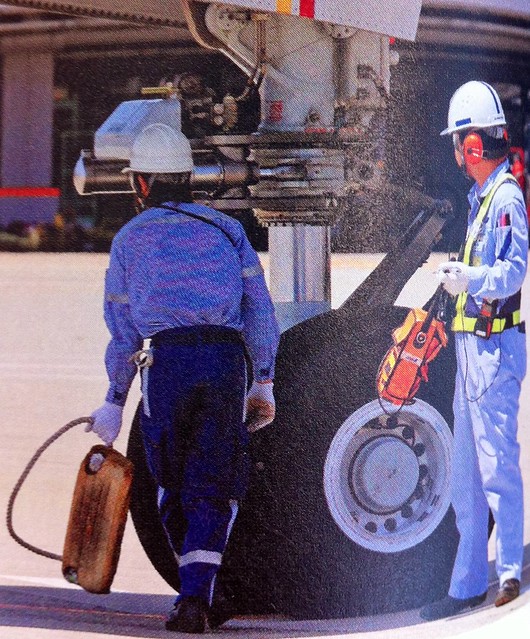
例えば、エンジンの除氷装置を自動に設定するなど、すべて正常であることを確認した後、機長は地上で待機している整備員と再び通信します。 機長:「地上、エンジン始動完了、通信ケーブルを外してもいいです」 整備員:「輪止めを移動し、着陸装置安全ピンを抜き、ケーブルを解除しました」 (着陸装置安全ピンは誤って脚を格納してしまうことを防ぐためのものです。飛行機が地上に留まっている間は必ず挿入されており、これにより誤操作で脚を格納しても飛行機が損傷するのを防ぎます)
輪止めが移動された後、ここでの地上整備員の仕事は終了です。彼らは飛行機を離れ、一列に並んで、まさに離陸しようとしている飛行機に手を振って見送ります。パイロットもまた、窓から彼らの労働に感謝の意を込めて手を振り返します。 (上の写真は広島空港で撮影)
飛行機はついに自力で移動できるようになりました。そこで副操縦士は空港の地上管制に申請します: “Ground, Air System 115, request taxi” これはつまり 「地上管制、こちらはAir System 115、誘導許可を請求」 という意味です。地上管制員は空港内の混雑状況や天候に基づき、移動してよいか、あるいは待機する必要があるかを指示します。問題がなければ、飛行機の誘導を許可し、誘導経路を知らせます: “Air System 115, Taxi to Runway 16R, Via P3 J2 W2 outer” これはつまり 「Air System 115、P3 J2 W2 外側経由で滑走路16Rへ誘導せよ」 という意味です。 パイロットはそれを復唱します: “Runway 16R, P3 J2 W2 outer, Air System 115” つまり 「滑走路16R, P3 J2 W2 外側, Air System 115」
飛行機は誘導路を利用してエプロンから滑走路へ移動します。誘導路は1本または数本の連続した黄色の中心線で識別でき、A、Cなどのアルファベットで命名されています。 上記のP3 J2 W2は空港内の滑走路出口の標識です。羽田のような大規模な空港では、飛行機がエプロンから滑走路の端まで移動するには一般に長い距離を移動する必要があります。パイロットは管制員が指示したルートを厳密に守って飛行機を誘導しなければなりません。誘導ルートはいくつかの地点で構成されており、パイロットは空港の図面(チャート)を参照し、ルートを確認してから誘導を開始します。
標識の様子は以下の図を見てください。滑走路24Lへの進入待ち地点A2の写真は、私が日本の関西国際空港で撮影したものです。 空港の標識にはいくつか種類があり、標識の色によってその意味を区別できます。 例えば、黒地に黄色の文字は位置標識で、上の写真の「A2」が地点標識です。 赤地に白い文字は強制指示標識で、滑走路または立入禁止区域に进入しようとしていることを示します。上の写真の「24L」は、まもなく24L滑走路に进入することを示しています。 黄地に黒い文字は方向標識および目的地標識です。下の写真の名古屋中部空港の「B6 B D6」は、現在のB誘導路から左折してB6地点へ、右折してD6地点へ行けることを示しています。「A B6 A6 A」の標識は、写真右下(写真の機体と正反対の位置)から来てこのB6地点に到達した場合、地上の誘導路に3本の黄色い線が現れることを示しています。左折線に沿って左折すれば左側のA誘導路に入ることができ、直進すればA6地点に到達し、右折すれば右側のA誘導路に入ることができます。 また、黒地に白い文字は滑走路残距離を示し、単位は1000フィートです。下の大阪空港の標識「3」は、滑走路を左から右に滑走している際、残り距離が3000フィートであることを示しています。
-
旅客機のコックピット探険 2.3 旅客機のゲートからのプッシュバックとエンジン始動
パイロットが離陸許可を取得し、出発前5分の準備作業(エンジン始動前の手順)を完了した後、地上管制にプッシュバックを申請することができます。例えば、
パイロット:“Tokyo Ground, Air System 115, request push back, spot 2, information F”
これは、『羽田空港地上管制、こちらはAir System 115便。プッシュバックを依頼、スポット2(搭乗橋2番)。ATIS情報F(Foxtrot)を受信済みです』という意味です。
空港の地上管制員はこの無線要求を受けると、エプロンの混雑状況を確認します。付近に他の航空機の移動がない場合、または当該便の移動が他の航空機に影響を与えない場合、次のように答えます。
“Air System 115, push back approved, runway 16R”
これは、『Air System 115便、プッシュバック許可。滑走路16R(Right)を使用してください』という意味です。
プッシュバックの許可を受けると、飛行機はいよいよ出発できます。
空港の大きなモニターに表示される各便の出発時刻について、一般の方は飛行機が地面を離れて離陸する瞬間だと思われるかもしれませんが、実際にはこの時間は飛行機が搭乗橋(またはスポット)を離れる時刻、つまり飛行機が停止状態から移動状態に入った時刻を指します。同様に、フライトの到着時刻も飛行機が地面に着陸した时刻ではなく、滑走して駐機場に完全に停止した時刻を指します。
まず、機長は内線電話システムを通じて地上で待機している整備員と連絡を取ります。地上員は電話機を機体のソケットに接続し、コックピットと通話できるようにします。
機長:「地上、プッシュバックとエンジン始動可」 整備員:「了解。パーキングブレーキを解除してください」 機長:「ブレーキ解除。ハイドロリックポンプ・オン」
(ここではボーイング777-200の会話を引用します。777の左右の主脚にはそれぞれ6つのタイヤがあり、後ろの2つのタイヤは油圧で自動車のように左右に切ることができ、これにより777の巨大な機体が地上で旋回する際、小さな回転半径を得ることができます。)
整備員:「了解。プッシュバック可」
この時、通信を担当する整備員の横にもう一人の地上員が前脚の車輪止め(チョック)を外します。下図のように、
 すでに飛行機の前輪に接続された強力なトゥートラクター(プッシュバック車)が、下図の牽引バー(トウバー)を通じて、
すでに飛行機の前輪に接続された強力なトゥートラクター(プッシュバック車)が、下図の牽引バー(トウバー)を通じて、
 数百トンもある飛行機を後押しし、機首が空港ターミナルビルに向くようにゆっくりと後退させます。
地上の整備員も飛行機と一緒に後ろに移動します。
数百トンもある飛行機を後押しし、機首が空港ターミナルビルに向くようにゆっくりと後退させます。
地上の整備員も飛行機と一緒に後ろに移動します。 (上の写真は名古屋中部国際空港で撮影)
(上の写真は名古屋中部国際空港で撮影)
注意すべき点は、プッシュバック中、パイロットは絶対に前輪の操縦舵(ノーズステアリング)操作やブレーキ操作をしてはならないということです。これを行うと前輪または牽引バーが破損する恐れがあるからです。プッシュバック中の機体の移動方向は完全にトゥートラクターによって制御されます。
 トゥートラクターが飛行機を後ろに押しながら旋回している様子。広島空港で撮影。
トゥートラクターが飛行機を後ろに押しながら旋回している様子。広島空港で撮影。
その一方、客室では機内放送が始まり、客室乗務員がフライト情報をアナウンスし、乗客にシートベルトを着用するよう案内します。
コックピット内のパイロットも暇ではなく、始動前チェックリストを実行します(下図はボーイング737-500のもの)。
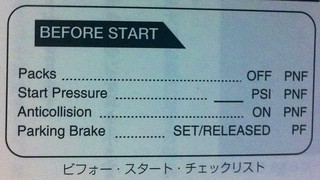 問題なければ再び地上と通信します。
問題なければ再び地上と通信します。機長:「地上、エンジン始動準備完了」 整備員:「了解。始動可」 機長:「右側2号エンジン始動」 機長:「左側1号エンジン始動」
 (これはボーイング737-800型の写真です。<a href=“http://tieba.baidu.com/home/main?un=berqiang&fr=pb"百度貼吧のberqiang氏に提供いただきました。出典は<a href=“http://tieba.baidu.com/p/2859718575?pn=1"こちら。)
(これはボーイング737-800型の写真です。<a href=“http://tieba.baidu.com/home/main?un=berqiang&fr=pb"百度貼吧のberqiang氏に提供いただきました。出典は<a href=“http://tieba.baidu.com/p/2859718575?pn=1"こちら。) -
エアライン操縦探秘 2.2 標準出発経路(SID)
前のセクション <a href="/blog/ja/2012/07/ja-airline_pilot_21-5"出発前5分 で、交通管制官がパイロットに対してMoriya7号出発手順(Departure Procedure)を使用するよう通告したことに触れましたが、出発手順とは具体的にどのようなものでしょうか?
航空機が空中を飛行する際、交通ルールが存在しないわけではありません。航空会社は数多く存在し、特に大規模な空港では数分おきに航空機が離着陸しています。 地上の交通と同様に、一連の交通ルールによって管理されていなければ、航空機の運航は極めて危険なものとなります。 そのため、空中には多くのルートが設定されています。地上の道路のように肉眼でこれらのルートを直接見ることはできませんが、パイロットは規定を厳格に遵守して飛行任務を遂行しなければなりません。 その中で、空港を離れる航空機のために設定されたルートと手順は、「計器出発方式(Standard Instrument Departure)」と呼ばれ、略してSIDと呼ばれます。
SIDは、離陸後から出発地点まで航空機を誘導する一連のあらかじめ設定された航路です。この出発地点とは、フライトプランにおける航路の最初のウェイポイント(航路点)のことです。言い換えれば、計器出発方式とは、航空機をターミナル管制区域(TMA/Terminal Control Area)から誘導し出すための手順です。前のセクションで触れたMORIYA出発手順のMORIYAは、羽田空港を離れる際の一つの出発地点であり、茨城県の守谷にあるウェイポイントです。
一つの空港には、多くの異なる計器出発方式(SID)が存在する場合があります。各滑走路には、航空機を異なる出発地点へ誘導するための異なる出発手順が存在します。航空機がどの出発地点へ向かうかは、使用する滑走路の方向、およびフライトプラン上の目的地と航路によって決まります。
この手順には、空港を離陸する際の針路、高度、旋回する地点、時間などが含まれています。管制官は航空機の飛行間隔を制御するだけでよく、パイロットはこの手順に従うことで空港を離れ、航路へと入ることができます。
出発手順は、多くのウェイポイントとナビゲーションポイントで構成されています。これらのウェイポイントは、経緯度で示されるか、または航法援助施設に対する相対位置で示されます。例えば、VORの放射方位(ラジアル)と距離を指定すれば、VOR近傍の特定の地点を確定できます。同時に、出発航路には上昇情報も記載されており、パイロットがある地点で特定の高度まで上昇すること、またはそれ以上の高度を維持することを示します。
航空機が出発地点に到着すれば、出発手順は完了です。
計器出発方式(SID)が規定されているのは、離陸後の航空機の安全を確保し、離陸機の処理を効率化するためです。また、住宅地の上空を飛行する際の騒音を可能な限り低減するという目的もあります。
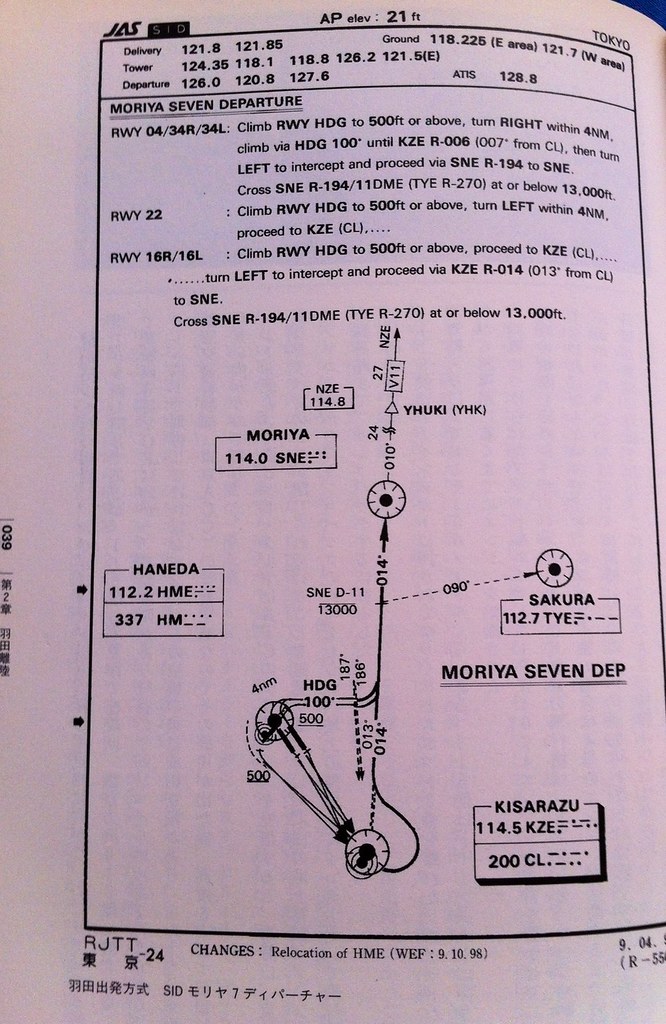
以下では、実際の羽田空港におけるMoriya7号出発手順の具体的な規定を見てみましょう。
図の最上部には、交通管制で使用される各種の周波数がリストされています。例えば、リリース許可(Delivery)は121.8および121.85MHz、地上管制は118.25および121.7MHz、塔は124.35、118.1、118.8MHzなどです。
図の下側の文字部分と航図は、出発手順を具体的に示しています。例えば、滑走路16Rまたは16Lから離陸する場合、 まず滑走路方向に沿って500フィート以上に上昇し、図の右下にあるKZE(KISARAZU 木更津)ウェイポイントまで飛行した後、 左に旋回して14度の方向(ほぼ真北方向)へSNE(MORIYA 守谷)ウェイポイントへ向かって飛行します。 MORIYAはVOR航法局です。 ここでは、MORIYAの前方11マイルの地点に高度制限があり、13000フィート(約3300メートル)以下で飛行しなければならないことが示されています。
VORは中国語で「超短波全方向無線標識」を意味し、国際民間航空機関(ICAO)が定める国際標準の無線航法援助施設です。 航空機に搭載されたVOR受信機は、VOR地上局から発射される基準位相信号と可変位相信号を受信し、これら2つの信号の位相差を比較することで、地上のVOR局に対する航空機の放射方位、すなわち航空機の磁方位(QDR)を算出します。そして、指示器に方位情報を表示し、パイロットが航空機の位置を確定し、航行を導くのに役立てます。
下の写真は、私が大阪の八尾空港で撮影した八尾VOR地上局のものですが、その構造は非常にシンプルであることがわかります。

小型機に搭載されるVOR指示器は以下の図のようになります(画像出典:Wikipedia):
 使用する際、パイロットはまずナビゲーション受信機の周波数をそのVOR局の周波数(例えばMORIYAなら114.0MHz)に合わせ、
次にOBS(Omni-Bearing Selector)ノブを調整して飛行したい針路に合わせます。もし航空機が現在ちょうどVOR局の方角を向いているのであれば、
VOR指示器の針は上の図のように中央の位置に表示されます。
使用する際、パイロットはまずナビゲーション受信機の周波数をそのVOR局の周波数(例えばMORIYAなら114.0MHz)に合わせ、
次にOBS(Omni-Bearing Selector)ノブを調整して飛行したい針路に合わせます。もし航空機が現在ちょうどVOR局の方角を向いているのであれば、
VOR指示器の針は上の図のように中央の位置に表示されます。Prev: 出発前5分 TOC: 目次 Next: 旅客機のプッシュバックとエンジン始動
完


{kind=link}