Misterios de la cabina de pasajeros 5.5 Inicio del descenso
En la sección 5.3, al resumir los procedimientos estándar de aproximación instrumental, se mencionó que, basándose en la información de altitud del punto de referencia de inicio de la aproximación, el piloto puede establecer los parámetros del motor y la tasa de descenso durante el descenso, teniendo en cuenta la hora estimada de llegada, el consumo de combustible, el rendimiento del motor, la fuerza y dirección del viento, entre otros factores.
Por ejemplo, el procedimiento de aproximación KAIHO comienza en el waypoint ADDUM ubicado en el Océano Pacífico, con una altitud mínima de ruta de 10,000 pies. Para poder descender desde la altitud de crucero hasta ADDUM, mediante el cálculo del sistema de gestión de vuelo (FMS), la aeronave necesita comenzar a descender desde un punto ubicado a 200 kilómetros al oeste de ADDUM.
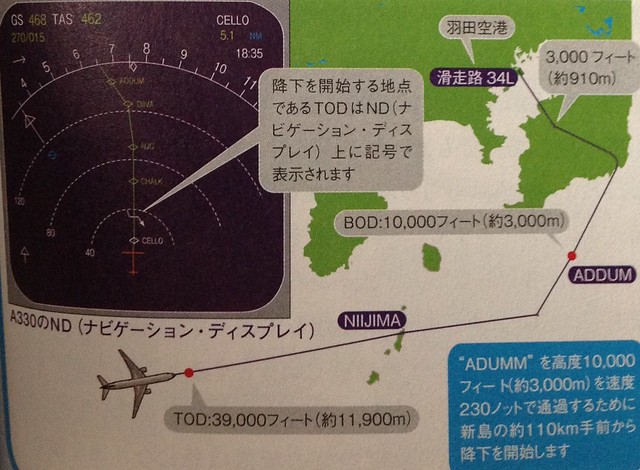 Generalmente, a este punto se le llama Top of Descent (TOD) o T/D, y su visualización puede verse en el modo de mapa del ND (Display de Navegación). Como se muestra en la figura del Airbus 330 anterior, se representa con una línea discontinua con una flecha, situada entre los puntos de referencia CELLO y CHALK. Además, el punto de inicio de la aproximación se denomina Bottom of Descent (BOD).
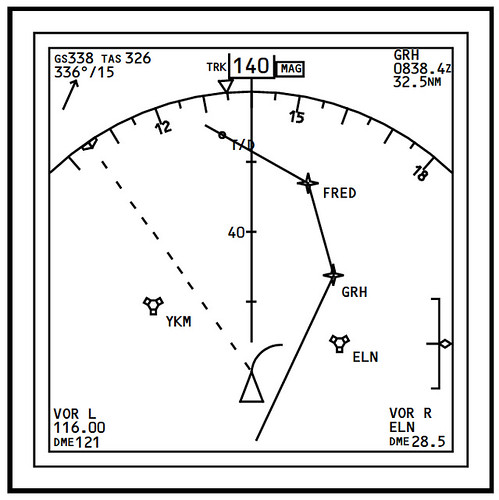
Otro ejemplo es en el ND de un Boeing 777, donde el punto T/D se marca directamente con un punto en la ruta.
Generalmente, a este punto se le llama Top of Descent (TOD) o T/D, y su visualización puede verse en el modo de mapa del ND (Display de Navegación). Como se muestra en la figura del Airbus 330 anterior, se representa con una línea discontinua con una flecha, situada entre los puntos de referencia CELLO y CHALK. Además, el punto de inicio de la aproximación se denomina Bottom of Descent (BOD).
Otro ejemplo es en el ND de un Boeing 777, donde el punto T/D se marca directamente con un punto en la ruta.
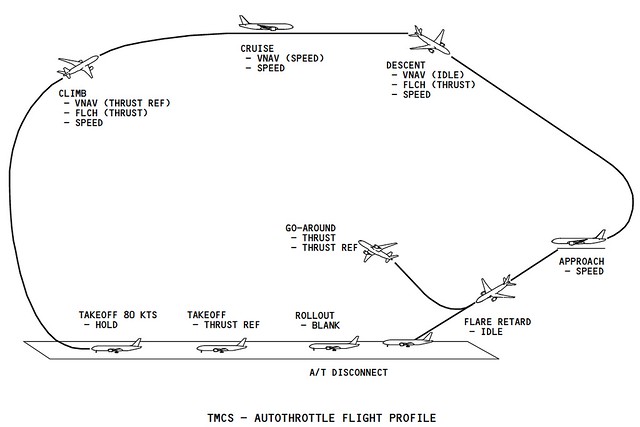
Después de pasar el TOD, la aeronave comienza a descender automáticamente. El diagrama esquemático de todo el viaje se muestra a continuación. (Este diagrama explica principalmente el modo de configuración del acelerador automático en cada etapa de vuelo, pero también es adecuado para explicar todo el proceso de vuelo, así que lo tomaré prestado aquí).
Con respecto al proceso de descenso, algo fundamental que se debe saber es que la aeronave no reduce la altitud bajando el elevador, es decir, bajando el morro del avión; el descenso de la aeronave se controla mediante la potencia del motor para ajustar el ángulo de descenso.
Cuando la aeronave pasa del vuelo nivelado al estado de descenso, se reduce adecuadamente la potencia, lo que hace que la aeronave reduzca ligeramente su velocidad. Según la relación proporcional entre la sustentación y la velocidad, al reducirse la velocidad, la sustentación también disminuye; por lo tanto, la sustentación se vuelve menor que la gravedad y la aeronave comienza a descender. Durante el descenso, la trayectoria de vuelo deja de ser horizontal y se inclina hacia abajo en un ángulo. En este momento, el ángulo de ataque de las alas no ha cambiado, pero la dirección de avance de la aeronave sí ha cambiado, de ir recto hacia adelante a ir ligeramente hacia abajo. Como resultado, el ángulo de ataque de las alas aumenta, lo que incrementa la sustentación. Esta sustentación adicional debido al ángulo de ataque equilibra el exceso de gravedad, y todas las fuerzas externas de la aeronave vuelven a equilibrarse, entrando en un estado de descenso a velocidad constante.
Durante el descenso, el morro de la aeronave mira hacia abajo. Esta actitud requiere muy poca potencia, y a menudo la aeronave puede incluso retirar completamente la potencia y planear. Al viajar en avión, la gente suele notar que la aeronave se vuelve muy silenciosa al comienzo del descenso. Se puede imaginar la actitud de la aeronave durante el descenso como un coche bajando una cuesta; en ese momento, no es necesario pisar el acelerador y el coche bajará de manera estable. Si la pendiente es grande, la velocidad será mayor; si la pendiente es pequeña, la velocidad será relativamente menor. Las computadoras de gestión de vuelo en las aeronaves modernas pueden ajustar automáticamente la potencia y la actitud según los requisitos del piloto.
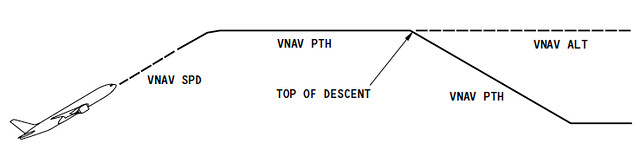
En general, los pilotos pueden establecer dos métodos de descenso: mantener una velocidad constante o mantener una pendiente constante. Esto corresponde a la configuración de cabeceo del FMC, lo que permite utilizar los modos VNAV SPD (Modo de velocidad de navegación vertical) o VNAV PTH (Modo de trayectoria de navegación vertical).
Durante el descenso en VNAV SPD, el sistema de acelerador automático generalmente mantiene el estado de ralentí (IDL E), mientras que el sistema de vuelo automático (AFDS) controla la velocidad objetivo establecida en el FMC.
Durante el descenso en VNAV PTH, la computadora de gestión de vuelo (FMC) generalmente controla la aeronave para mantener una pendiente de descenso de 3 grados; la velocidad entre el TOD y el BOD es controlada automáticamente por la computadora. Por ejemplo, cuando la aeronave se desvía hacia arriba de la pendiente de 3 grados debido a la influencia del viento, el FMC aumentará la velocidad para mantener la aeronave en la pendiente original.
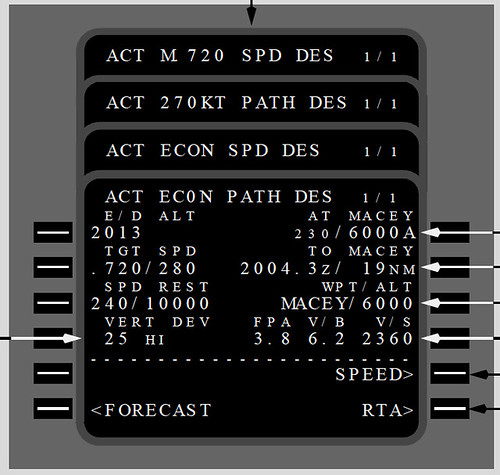 La imagen de arriba muestra la pantalla del CDU de un Boeing 737, también en el estado VNAV PTH. Al comenzar el descenso, el modo cambia automáticamente de ACT ECON CRZ a ACT ECON PATH DES. En 2L se muestra el valor de velocidad actual: Mach 0.72, 280 nudos. En 3L se muestra la limitación de velocidad; dado que las regulaciones de la industria establecen una limitación de velocidad de 250 nudos por debajo de los 10,000 pies, se ha establecido la limitación de velocidad en 240 nudos específicamente para no exceder este límite.
La imagen de arriba muestra la pantalla del CDU de un Boeing 737, también en el estado VNAV PTH. Al comenzar el descenso, el modo cambia automáticamente de ACT ECON CRZ a ACT ECON PATH DES. En 2L se muestra el valor de velocidad actual: Mach 0.72, 280 nudos. En 3L se muestra la limitación de velocidad; dado que las regulaciones de la industria establecen una limitación de velocidad de 250 nudos por debajo de los 10,000 pies, se ha establecido la limitación de velocidad en 240 nudos específicamente para no exceder este límite.
¿Por qué se suele adoptar una pendiente de 3 grados para el descenso? Esto se debe a que 3 grados es lo más adecuado para calcular mentalmente la relación entre la altitud y la distancia de descenso. Se puede estimar fácilmente utilizando esta fórmula aproximada: Distancia de descenso requerida (millas náuticas) = Altitud de vuelo (pies) / 1000 * 3
Por ejemplo, para descender desde una altitud de crucero de 33,000 pies hasta el suelo, Altitud de vuelo / 1000 * 3 da como resultado 99 millas náuticas (aproximadamente 190 kilómetros). Por lo tanto, para que la aeronave descienda desde 33,000 pies (10 kilómetros de altitud), debe comenzar a descender al menos a 190 kilómetros del aeropuerto de destino.
Prev: Procedimiento estándar de aproximación por instrumentos TOC: Tabla de contenidos Next: Comunicación ATC durante el descenso Fin