飞行模拟知识库
-
X-Plane OpenSceneryX Object Library 公开地景库 和 Ground Services 地面服务 plugin
听说有这么一个地面加油/推车/乘客登机梯的插件,所以调查了一下。 这个插件效果如下:

安装方法如下: 首先需要安装OpenSceneryX Object Library for X-Plane®插件,可以从下面网址下载安装程序, OpenSceneryX Object Library for X-Plane® 比如Mac就选择Mac Installer下载,然后启动OpenSceneryX Installer.app就是了,因为要从网上下载大量地形图,很费时间,自己大概花了1个小时才装完。
-thumb-640x511.png) 支持OpenSceneryX 的地形包有很多,这里有几百个机场的地形图,貌似都是免费的,宝库啊。
支持OpenSceneryX 的地形包有很多,这里有几百个机场的地形图,貌似都是免费的,宝库啊。另外貌似还需要Python interface这个东东,不过<a href=咱们以前介绍过的,你应该装好了的吧。
然后生成一个叫PythonScripts目录放到plugins下面,比如象 xPlane / Resources / plugins / PythonScripts / 然后把这个文件拷到该目录下面就可以了
2017/08更新
如果你用的是X-Plane 11, 可以参看X-Plane 11里的推车的介绍,因为这个版本中就内置了推车。 另外地景库的信息可以在这篇介绍中找到。
-
空中交通管制ATC (Air Traffic Control) 基本知识 -2
上篇:<a href=空中交通管制ATC (Air Traffic Control) 基本知识 -1
-
空中交通管制ATC (Air Traffic Control) 基本知识 -1
关于空中交通管制ATC的基本知识写个复习笔记,便于以后自己查阅或者网友学习用。
首先ATC学习一定要重视实践啊。 买个能收听航空波段的收音机或者无线接收机,在网上查查自己家附近的机场的ATC波段, 没有什么窍门只有多听才行。 如果离机场远,听不到放行(Clearance Delivery),地面(Ground),塔台(Tower),进近(Approach),离场(Departure)的通话也没关系, 即使飞机在空中飞行时飞行员与区调(Control)的单方面通话能听到的话,也可以达到学习的目的。 我就经常在家里听东京管区的无线电通话。
(经常有人会问收听航空波段的信息违法不违法? 如果你光是听而已,这是没有问题的。)
一般来说ATC请求的顺序是 a 通信方的名字,如空管名 b 自己的呼号(Call sign),如航班名(公司名+数字)或机身编号 c 自己的位置 d 具体信息,要求,命令等等 具体例请看下文。
国际无线电通话拼写字母(Internation rediotelephony spelling alphabet) 为了防止误解,在ATC通话中的ABCD字母都使用特定的单词来代替,如果不知道这些单词的话, 即使是美国人听ATC也会不知所云。所以首先一定要牢牢记住下面的字母表。 (下面是本人自己默写下来的,可不是copy/paste呦)
A Alfa B Bravo C Charlie D Delta E Echo F Foxtrot G Golf H Hotel I India J Juliett K Kilo L Lima M Mike N November O Oscar P Papa Q Quebec R Romeo S Sierra T Tango U Uniform V Victor W Whiskey X X-ray Y Yankee Z Zulu 另外象9不读nine而读作nin-er,这个也要注意。 还有飞行高度flight level一般写作缩写FL。
-
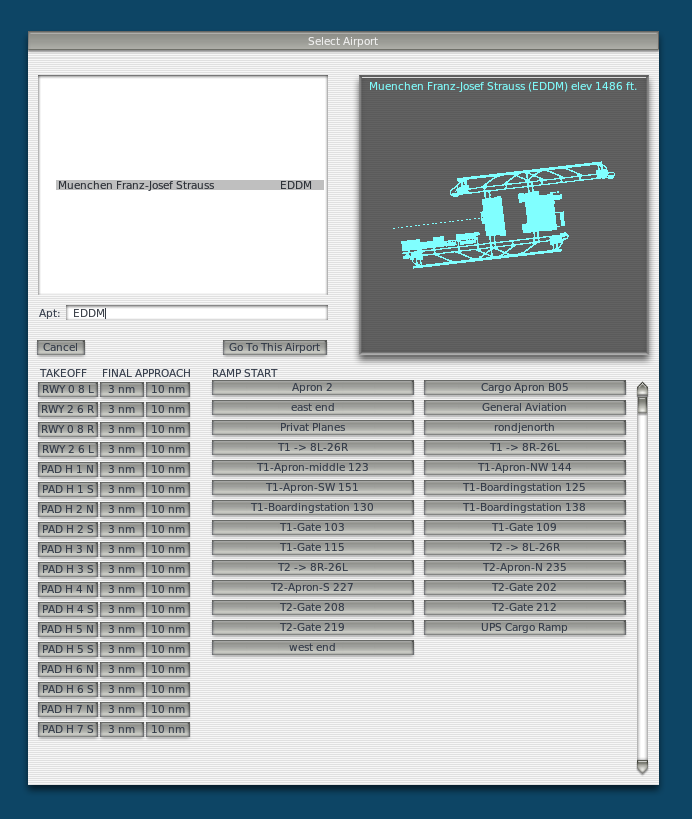
慕尼黑国际机场EDDM地景图
今天x-plane.com官方网站推荐了一个免费的慕尼黑国际机场的地景图, 既然是免费当然要下载看看了。
下载地址在这里--http://www.x-planes.de/, 产品名叫做"EDDM v2.1 Beta 2", 下载包名是EDDM_2_1G8B2.zip, 在网站中可能不太好找,耐心找找看。
下载后把压缩解开后为EDDM_2_1G8B2目录,安装方法是只要把这个目录拷贝到X-Plane10主目录下的Custom Scenery目录里去即可使用。
启动X-Plane10, 把机场选到EDDM就可以用了。 菜单:Location -> Select Global Airport
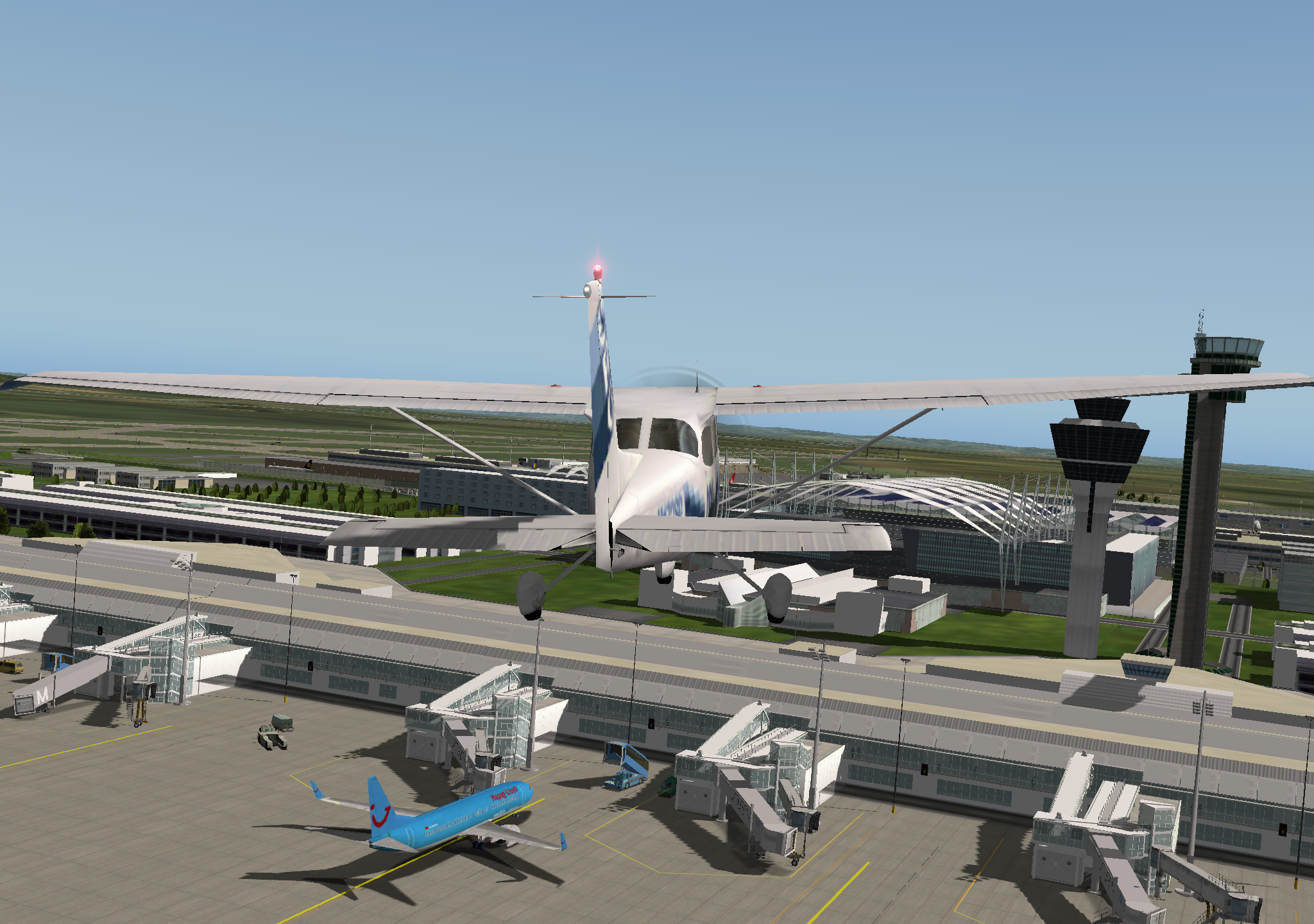
-thumb-640x757.png) 下面放几张自己试飞的拷屏。
下面放几张自己试飞的拷屏。



-
大阪伊丹机场拍摄点介绍之一 千里川
前一段时间去大阪出差,利用业余时间去了趟大阪机场拍摄起落飞机,简单记录一下。 注: 本文所有照片都由作者拍摄. 没有征得允许不得转载。
大阪机场RJOO一直是自己想去拍摄的地方, 因为它的32L跑道头正好有一条小河叫做千里川,河边有一条散步道, 起落的飞机正好从散步道正上方飞过,尤其是正对跑道处就成了飞机爱好者的天堂, 听无线通信的,拍照的,带小孩一起看起落的,无不被头顶正上方几十米处飞过的客机所震撼。 从跑道中心处能清楚看到飞行员在降落时做最后的姿态调整左右摇摆,或者侧风时机头偏向一边,是个非常难得的观察飞机的好地方。
去千里川的方法是从大阪的市中心"梅田车站"坐阪急线, 方向是"阪急宝塚本線・雲雀丘花屋敷行",坐车十几分钟到曾根站下车,
 然后一直向西走15分钟就到了。
然后一直向西走15分钟就到了。

到了以后发现千里川是这个样子的,怎么样?是不是很有魄力?果然名不虚传!

先来一张正对着降落指示灯降落中的ANA B777-200 (JA701A),
 数秒之后,飞机从头顶掠过,向跑道尽头飞去,跑道上的白色线反射到机腹,看得一清二楚:
数秒之后,飞机从头顶掠过,向跑道尽头飞去,跑道上的白色线反射到机腹,看得一清二楚:
 几秒之后,飞机落地之前刹那的一瞬间:
几秒之后,飞机落地之前刹那的一瞬间:

大阪机场相对成田羽田等大机场来说相对小一些,所以国内航班中小型客机比较多,这也是一个看点, 比如下面这个天草エアライン Bombardier DHC-8-100 JA81AM,它的涂装就比较有特色,蓝色的海豚在大海中遨游的样子很可爱不是

还有下面这架Bombardier DHC-8-400 JA857A,绿色的ANA机也是比较少见的,发动机引擎罩上写着ECO Friendly Airline,一定是在标榜自己是节能的航空公司呢吧。看起来飞机的涂装也是一种公司的宣传手段。

嗯,这架Bombardier CRJ-100 JA01RJ属于IBEX航空,是一家地区性小型航空公司,一共只拥有6架庞巴迪客机。

从头顶飞过的一架架大型客机,看着这舒展的机体,真是一种享受啊

而在河边散步的对对年轻的情侣们也被这一架架飞机所深深吸引住驻足不前

另外从河边看机场停机坪也是一览无余,飞机的地面上的移动看得清清楚楚

话说这一天最大的收获是拍到了波音787!这架编号为807A的787是交付给ANA的第四架。 从照片可以看到787梦想飞机的一些独特的特征,如线性的机头,发动机锯齿型短舱,流线型垂直尾翼,小巧的襟翼整流罩等等,一眼就可以看出来。
 从这个角度看,787的略微向上弯曲的机翼也是一目了然。
从这个角度看,787的略微向上弯曲的机翼也是一目了然。

照片太多,就不一一介绍了,总之本次大阪机场之行收获丰厚,非常满足。 最后发一张曽根站 东出站口的照片,纪念一下。

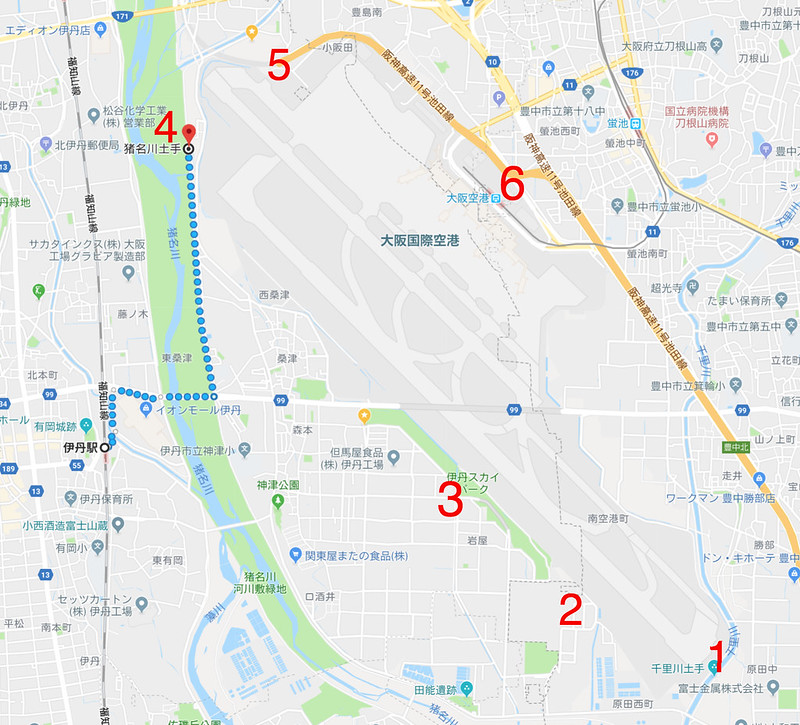
千里川河岸地理位置位于在大阪伊丹机场东侧,图中1号处的地点即是。
-
介绍一个免费飞行计划管理网站
发现一个飞行计划管理网站http://xplane.anzui.de:3000/flight-planner 可以简单在地图上输入机场和waypoint,并可以存储成fms文件供x-plane 使用, 因为是免费的,使用方法又简单,所以向大家推荐一下。

-
开关机舱门 与 畅飞塔希提岛
又有一段时间没有更新了,上个星期出差,周末又去京都大阪赏樱花,结果X-Plane的练习机会就少了。 今天外面一直下雨,不宜出行,那么就好好在家练习一下。
一开始在夏威夷飞着,突然无意中发现塞思纳172的机舱们是能打开的! 只要按alt+e就行。关门是alt+r键。

而且发现在飞行中也能打开门还不影响飞行,这一定是个bug啊。

在夏威夷飞腻了,决定到别的热带海岛去转转,于是就来到了向往已久的塔希提岛,绕岛飞一圈。
为什么是塔希提岛呢?看看百度百科的介绍就知道了: 塔希提岛,也译为塔西提岛(Tahiti),又称为大溪地,是南太平洋中部法属玻里尼西亚社会群岛中向风群岛的最大岛屿。这里四季温暖如春、物产丰富。衣食无忧的人们常常无所事事地望着大海远处凝思,静待日落天亮。阳光跟着太平洋上吹来的风一同到来,海水的颜色也由幽深到清亮。他们管自己叫"上帝的人",人们管那里叫"最接近天堂的地方"。
以火山为背景拍张照,虽然有些薄雾倒还不影响观看风景:

空中打开舱门透透风,哈哈

最后安全回到法阿国际机场NTAA,降落还算不错吧。

好了,游览飞行极其满足,去吃饭啦!
-
X-Plane10图形引擎开发者Ben Supnik的一篇采访文章
一个多月来,由于出差和工作比较忙,基本没什么时间练习X-Plane,这个博客也很久没有更新了,不好意思。 今天在网上看到aerosoft.com对X-Plane10的图形引擎开发者Ben Supnik的一篇采访文章, http://asn.aerosoft.com/?page_id=5878 从中挑选几个比较感兴趣的话题给大家。
-
X-Plane 10.04 Beta 2发布
X-Plane 10.04 Beta 2发布了,因为还是beta测试版, 所以也还是需要自己主动去启动X-Plane 10 Updater程序来更新。
更新点如下,不过貌似跟自己的关系不太,自己经常使用的功能基本不在列表里面。
All buttons on the FMS’s should work properly even if there are two different FMS’s in the airplane. Wind-shear and turbulence model refined a little more to be more complex in it’s randomness, and not always quite so strong in what are requested to be moderate conditions, and to change in a reasonable way with altitude. This should help improve wind and turbulence modeling, especially with Real-Weather turned on. X-15 drop and Space-Shuttle-carry missions should work properly now. Right-mouse drag to look around in 3-D cockpit command-look view, and mouse scroll wheel zooms. This is a pretty convenient way to look around the 3-D cockpits. (This works in “command” look mode, not mouse look mode! So when you are not right-mouse dragging, the view stays still and you can manipulate the 3-d panel.) Track-IR functions in ALL 3-d cockpit views now… It has WORKED for years, but is now easier to find since it engages in ALL 3-d cockpit views, not just one. Cool new feature for QuickTime movies: Movie quality! Set it high or low depending on how good you want it to look… and how much disk space you want to burn! External visuals should sync-up faster in the multi-machine setups, which should save some time in real flight-training scenarios. Landing lights, spotlights, and spotlight aiming-angles all go from master machine to external visuals now. Plane-Maker system screen: Option to auto-load with current values, or not, airspeed, vertical speed, and altitude when a new autopilot mode is engaged. Visibility tuned to change with altitude in a more accurate way to follow the reported weather more closely. AI planes should be better about holding desired altitude now, resulting in less annoyed air traffic controllers. Fixed: incorrect warnings about missing scenery Fixed (partly): the ocean shading should have fewer sharp lines on it. Far view shading of the ocean is still a work in progress…more color tuning in a future beta. Fixed: wing flex now works - X-Plane was incorrectly zeroing out wing-flex on some v10 planes. Fixed: sharp turns in taxiway lines now render correctly at KSEA and other airports. Fixed: right button on Linux is now the “right” button, not the scroll wheel itself. Fixed: plugins won’t crash if they try to read the weather from XPluginStart Facades:
-
夏威夷漫游 首飞直升机
接着昨天继续在夏威夷飞行,在火奴鲁鲁机场touch and go也练习得比较熟练了, 那么就远离机场,尽情享受以下热带海洋风光吧。
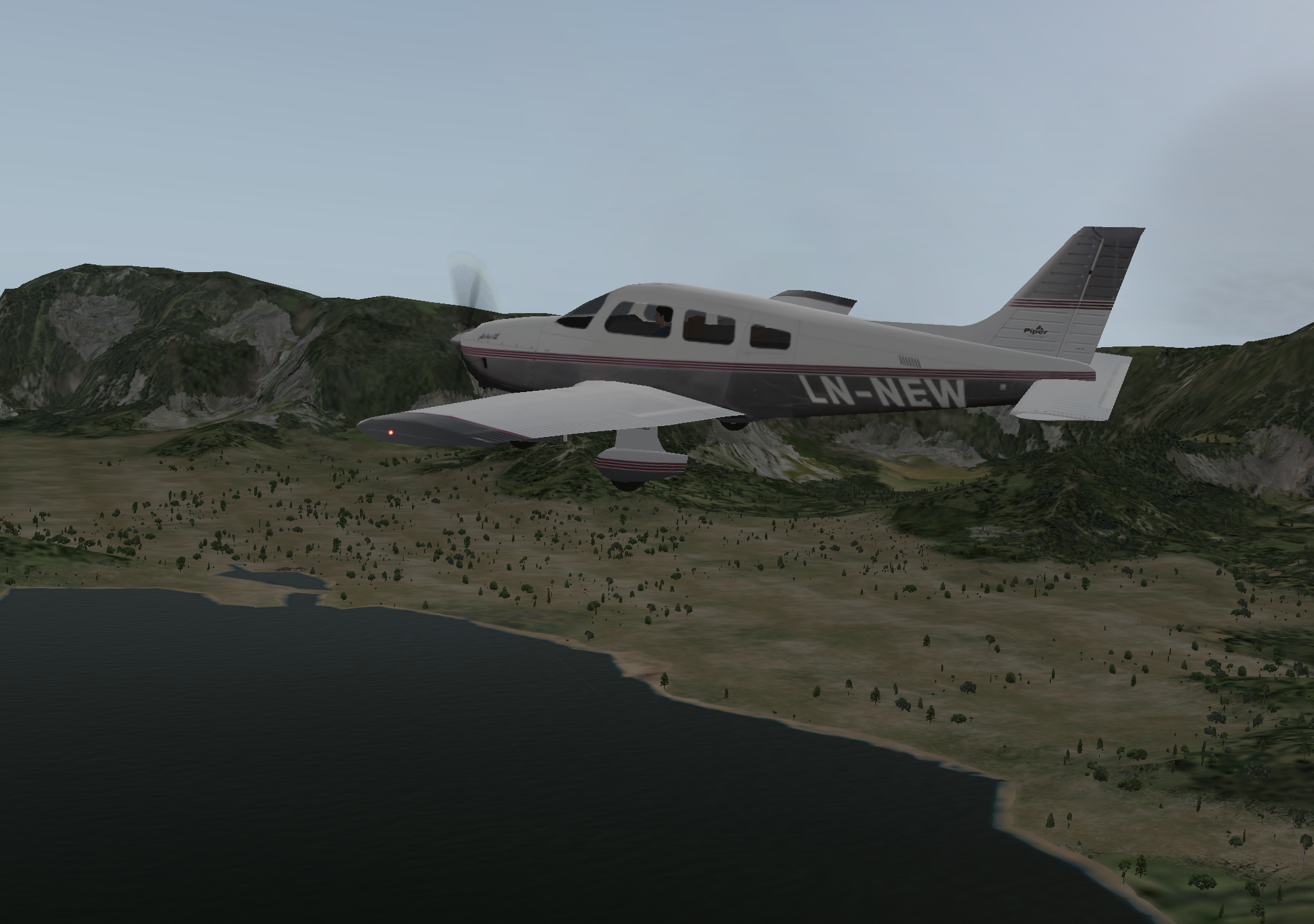
今天换派珀PA-28飞机,先练了2-3次touch and go,然后出发绕着欧胡岛飞了一圈,
 这一片的风光太熟悉了,毕竟自己亲自飞过的地方,每次都觉得很亲切。
最后成功降落,留个念吧。
这一片的风光太熟悉了,毕竟自己亲自飞过的地方,每次都觉得很亲切。
最后成功降落,留个念吧。

不过总是感觉固定翼飞机速度太快,高度又高,看风景真不太合适,于是灵机一动,打算换直升机飞飞试试看。
 第一次玩直升机,一开始加油门后飞机就直打转,也不知道如何控制,
试了试各种操作,发现基本设置与控制和固定翼飞机很不一样。
第一次玩直升机,一开始加油门后飞机就直打转,也不知道如何控制,
试了试各种操作,发现基本设置与控制和固定翼飞机很不一样。首先直升机需要增加一个设定,就是Collective总距操纵杆,这个是固定翼飞机里没有的概念。 推拉Collective可以改变桨叶的倾斜角度,从而达到控制直升机的飞行高度的目的。 Settings/Jostick & Eqipment/Axis里的设定如下:
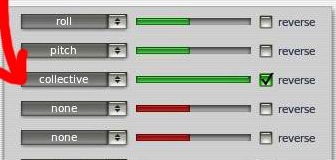 跟固定翼飞机一样,pitch,roll,yaw的三轴设定保持不变,
因为是自动油门,所以把throttle改为collective,慢慢操作collective使机体升起,
然后用脚舵小心控制平衡,比如机首向右偏的话就蹬左舵把它拉回来。
跟固定翼飞机一样,pitch,roll,yaw的三轴设定保持不变,
因为是自动油门,所以把throttle改为collective,慢慢操作collective使机体升起,
然后用脚舵小心控制平衡,比如机首向右偏的话就蹬左舵把它拉回来。还有一点要注意的时,有些直升机机体的governor设定可以开关,
 打开GOV以后即可开启自动油门,这样就不用手动控制油门,驾驶要简单多了。
打开GOV以后即可开启自动油门,这样就不用手动控制油门,驾驶要简单多了。左右脚舵控制着尾旋翼的倾斜角度,尾旋翼的作用是防止机身在主旋翼旋转产生的反作用力下向相反方向旋转。因此脚舵的作用是让直升机在飞行时向左或向右改变方向,类似于固定翼的方向舵。 还有yoke用来控制着旋翼的倾斜角度,向前压杆就会使直升机向前飞,向后拉杆会使直升向后飞行。
摸索着终于把直升机开起来了。 好吧,来张在珍珠港的纪念照。亚利桑那号纪念馆,你应该知道吧。

 大概齐把直升机玩转起来,还是小有成就感的嘛。
大概齐把直升机玩转起来,还是小有成就感的嘛。 -
训练日记:火奴鲁鲁机场的tracffic pattern
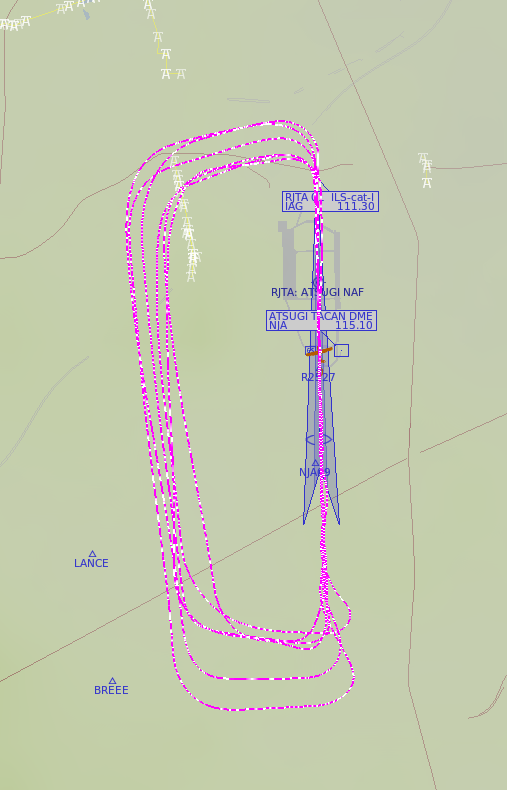
一直把家附近的RJTA当作自己的主场,练习都选在这里进行。 不过这几天风大,很不适合训练,于是把场地就换到自己曾经亲自驾驶过的夏威夷火奴鲁鲁机场来了。
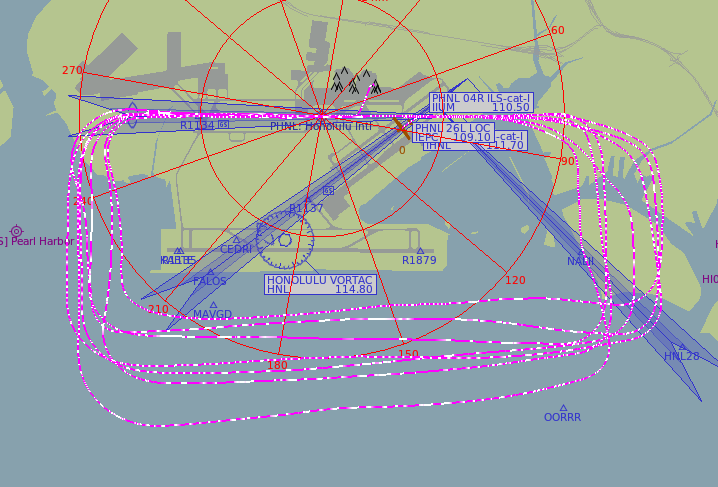
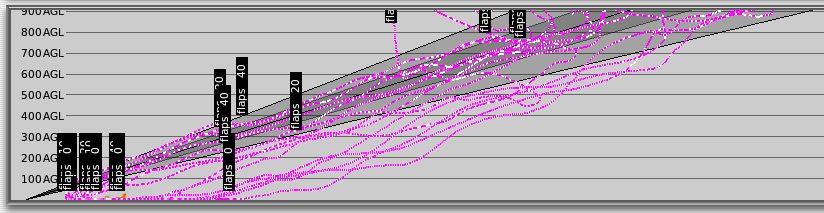
刚到时还不太适应场地,随便选定26L跑道,先飞了一个小时的touch and go, 轨迹当然是歪歪扭扭,
 高度控制也是忽高忽低,
高度控制也是忽高忽低,
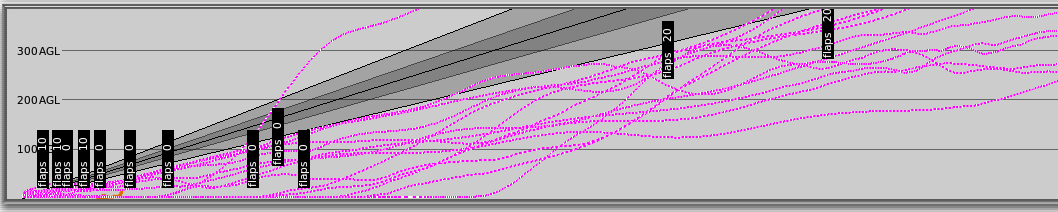 用了一个小时终于把地形熟悉好,五边的控制也逐渐得心应手,最后的降落还算满意,full stop以后以Aloha塔台为背景拍张照片,纪念一下。
用了一个小时终于把地形熟悉好,五边的控制也逐渐得心应手,最后的降落还算满意,full stop以后以Aloha塔台为背景拍张照片,纪念一下。

晚上吃完饭后又飞了一个小时,巩固一下练习成果,除了最后进入final的时机还有些早,高度下降得又是比较早以外,大部分的降落都还算满意。 好不容易去趟夏威夷,连旁边近在咫尺的珍珠港也没去,专心练习,精神可佳,于是留下以下拷屏做为纪念。
-thumb-600x406.png)
-thumb-600x155.png)
完
-
训练日记:飞行的基本操作练习
水平飞行 level flight, 爬升, 下降descent的基本操作之个人总结,怕今后忘了先写下再说。
为了维持稳定的水平或者爬升与下降时,一定要先调整动力,然后控制机头的姿态pitch,最后是调整配平。
第一步的动力调节之所以重要,是因为发动机推力决定了飞机上升和下降状态。 一般人印象中,飞行员拉杆使飞机上升,推杆使飞机下降,实际上这是错误的概念。 拉杆实际上确实能使飞机上升一段高度,但同时在推力不变的情况下,空速会不断减少最终使飞机进入失速。 同样如果想用推杆使飞机下降,飞机不断低头而使空速会不断增加,这将会提高飞机的升力,使高度反而升高。 所以一定要记住,为了维持一个稳定的高度调整过程,一定要调整动力。 从爬升进入平飞状态(level-off)时,首先要适当降低发动机推力;从平飞进入爬升时要提升推力;从平飞进入下降时要降低推力。
第二步调整姿态角pitch的目的既然不是高度,那是什么呢?是为了调整空速。 推杆后,飞机会低头增速;拉杆后,飞机会抬头减速。 注意这里的速度的增减是有一定范围的,如果想要大幅增速,毕竟还是需要增加发动力推力的。
第三步的配平,主要是为了减少拉杆推杆的力量,所以当动力和姿态基本稳定后,也就是高度和速度稳定以后, 适当调整配平器让飞行员不用老用力推拉着杆,减轻驾驶压力。 这里要注意的是配平毕竟是个辅助的操作,高度速度调节主要还要靠动力和姿态角,不要过度对配平进行操作。
实际操作练习 假设你正处于95节的平飞状态,动力为2200rpm,高度2000英尺,现在准备上升3000英尺。 塞斯纳172的最佳上升率时的速度为75节,所以你先降低空速,拉杆抬头。 当速度接近75节,把油门加大到2400rpm,高度不断升高。同时为了维持速度的稳定,需要微微调整pitch。速度稳定后配平使加在操纵杆上的力量为零。 这样就进入稳定的上升阶段了。
当高度接近到3000英尺,一般来说当上升率为1000英尺/分时,取该数值的10分之一,即距离目标高速100英尺的2900英尺处压杆,控制飞机姿态恢复到水平,同时飞机会加速,当恢复到平飞的90节左右时,降低油门到2200rpm。 到达3000英尺处,逐渐调整pitch,使速度稳定在95节左右。 高度和速度都稳定下来后,最后进行配平。 如此进入了3000英尺稳定平飞状态。
从3000英尺平飞,动力2200rpm,空速95节的状态下降到2000英尺时, 首先减油门至1800rpm,拉杆,调整速度至85节左右。然后配平。速度稳定后即进入了稳定的下降阶段。 到达2100英尺处,加油门至2200rpm,压杆控制飞机姿态恢复到水平。 高度到2000英尺,控制速度维持至95节,并配平。 这时就又恢复到了2000英尺的稳定平飞状态了。
完
-
训练日记:事隔两周后的练习 traffic pattern 与 touch and go
由于出差的缘故,有两个星期没有练习X-Plane,怕手生了赶紧利用周末复习一下。 今天主要还是重复做touch and go,围着机场一圈又一圈。
看轨迹图觉得还是base leg问题最大,速度有些过快,进入final approach的时机比较晚,另外机头总还是对不准跑道。
自己的traffic pattern的操作一般如下:
departure leg: 55节抬前轮,爬升空速80节~90节,至300英尺处减油门至2000rpm,500英尺处转弯 这个阶段感觉2点操作比较重要,一个是脚舵,在跑道taxi和刚刚腾空时总感觉飞机会向左偏(应该是P-Factor效应吧,这里有篇文章就讲这个的),所以要 注意观察turn coordinator倾斜转弯指示器的小球,用脚舵把它控制在中央位置;另一个是一般刚起飞后机头总有向上抬的倾向,可以适度压机头使爬升角度不过太大。
crosswind leg: 保持爬升空速80~90节,至900英尺处转弯 这个阶段也要注意爬升角度不至过大,尽量是crosswind这一边稍微长一些,便于base leg时有更多的时间进行调整
downwind leg: 收油门到1800rpm,1000英尺处改平,巡航速度90节。 正切到跑道头时收油门至1500rpm使飞机下降高度到800英尺,抬pitch减空速至80节。 这个时候比较困难的是为了减速抬机头时,飞机的下降率也随之上升,所以达到800英尺高度时总是花时间比较长,心里着急。所以这几个操作还是要多练习。 跑道头于机翼成45度时应该进入base leg,但是因为自己为调整高度花的时间长,大概转弯时的角度好几次都不到30度了吧。
base leg: 收油门至1400rpm,抬机头使空速降到70节,放下襟翼10度。500英尺处开始转弯。 这个阶段的问题也还是速度的控制还不够自如,花时间一长,就飞过了跑道,所以看上图就知道,有几次在五边处飞了个S形,轨迹很槽糕。
final approach: 收油门至1300rpm,空速65节,如果速度过高可以放襟翼20度,但速度控制的没问题时不继续放襟翼貌似也没问题。到跑道头收油门,脚舵控制朝向跑道中间线,平漂落地等等。 这个阶段的问题还是对不准跑道头,姿态总有些侧风着陆时的感觉,怪怪的。另外就是高度有时候降的过低,接近跑道时不得不加大油门以维持高度。四边五边时的维持一个坡度更小更平稳的下降率是今后的重要课题。
完
-
X-Plane 10.04 Beta 1终于发布
出了个差刚回来,这个blog也暂停更新了近2个星期,不好意思
X-Plane 10.04 终于发布了,这次首先推出的还是测试beta1版, 要注意要想安装的话,必须主动去启动X-Plane 10 Updater程序, 而不象以前启动主程序时被提醒要升级。 你也快点去升级看看吧。
这次的新版内容如下,有时间再翻成中文。
ATC:
AI Aircraft now climb/hold altitude better dramatically reducing the frequency of hearing ATC yell at them. Protect against aircraft doing something WAY out of bounds like departing instead of taxiing or holding short. Stability improvements Step descents dramatically improved ATC should now tell the user what approach they’re setting them up for ATC “Radio” box text color tweak Fixed AI aircraft names Lots of tuning and tweaking to make everything just right here in this release:
-
插件介绍: Google地图显示GMAP FOR X-PLANE 的EFB Edition显示模式
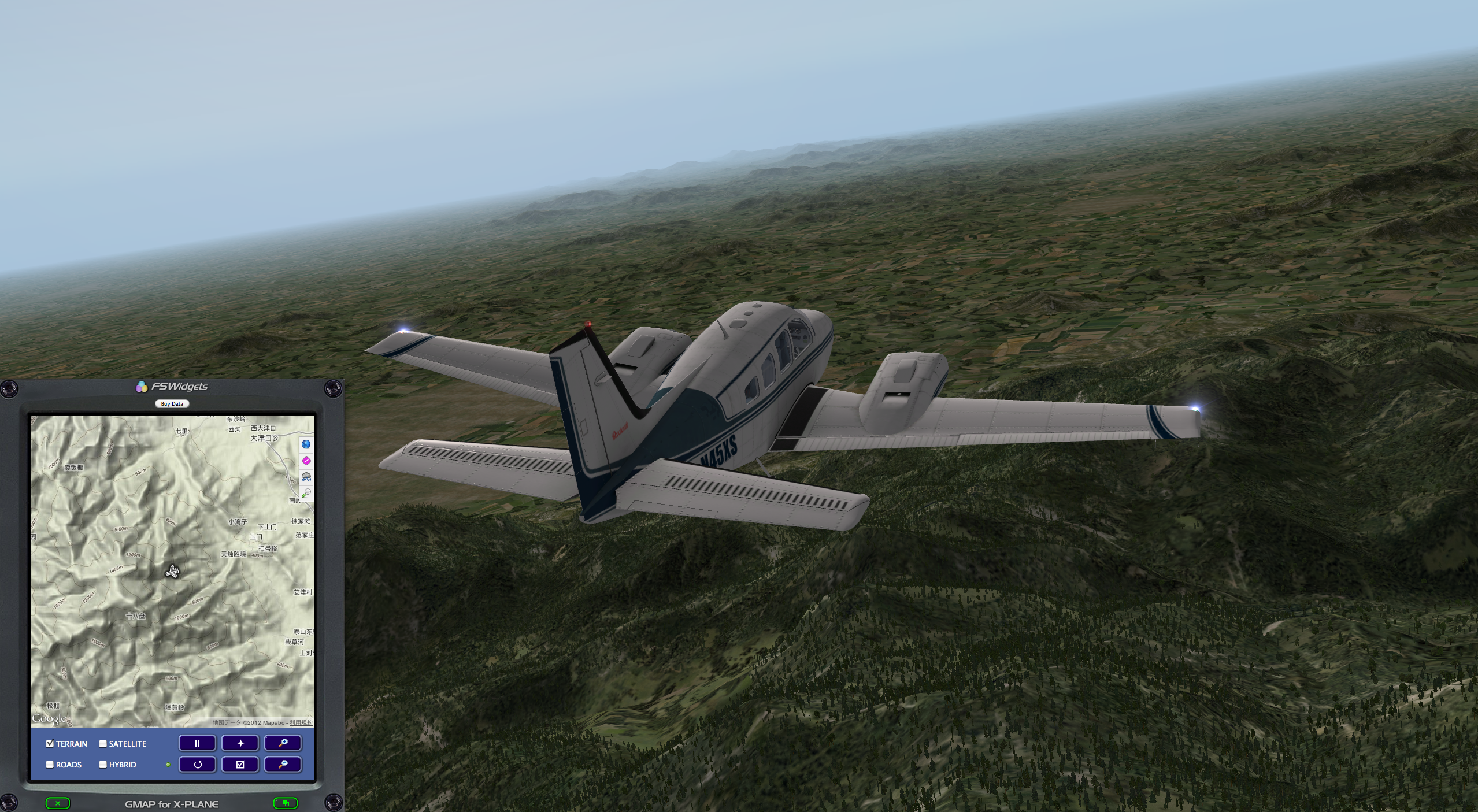
以前介绍过 <a href=插件介绍: Google地图显示GMAP FOR X-PLANE (FREE MOVING MAP) , 这个插件其实还有一种显示模式, GMap for X-Plane (Mac Version) 2.0 EFB Edition, 我觉得更象GPS导航仪的感觉,真实感更强,推荐一下。
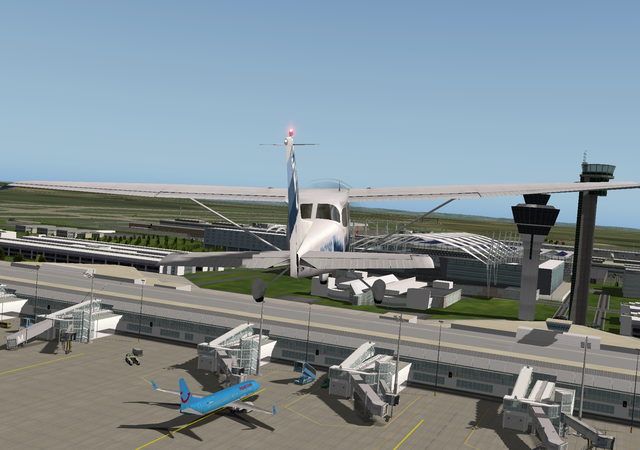
-thumb-800x435.png) 上图是停留在济南机场的截屏。
上图是停留在济南机场的截屏。-thumb-800x439.png)
上图是飞在泰山上空时的截屏。
-
训练日记:维持速度高度的困难
继续在塞苏纳172上练习touch and go和steep turn, steep turn比以前高度和坡度的维持要好一些了, 看local map上画出的接近8字的航迹还是有一些达成感的。 以往驾驶时把注意力主要集中在高度和坡度上,经过几天练习后有些进步,但一直却没有太在意速度稳定性的问题。 今天飞行时更加注意观察了下速度计,发现速度变化还是挺大,从80到100节之间很不稳定,这可还不行, 今后还是要注意把速度变化维持在10节之中多练习。
touch and go的问题还是在base leg以后下降率过大,以致高度下降过快, 注意以后虽然有些改善,但还是不够理想,这个课题还是要花时间慢慢解决。
-
训练日记:touch and go
今天周六,终于有时间尽情练习了,于是把机场地点选在家附近的rjta, 也不管atc了,起飞以后直接飞5边起落航线,然后touch and go, 一圈接一圈,大概飞了15个吧,这才full stop。
今天的收获是要注意观察地面标志,何时进crossswind leg,何时进downwind leg, 何时进base leg,一开始时自己总以跑道为参照物,所以不得不不断的切换视角,极其繁琐。 后来就找地面上的一些标志性目标,比如高楼,高速公路,或者类似公园一样的大块绿地等等, 以这些做参照的话,转弯时就可以集中精力操纵飞机,而不用总看跑道的位置。
实际飞行后看看local map,参照地面目标以后飞机的航迹很明显跟以前不一样, 以前的总是歪歪扭扭的不正规的4边形,后来的就基本接近4边型了,虽然四个角还不全是90度, 但已经改善不少了。
看起来今后还得要多练习呀。
-
liveatc.net的听力练习续
前几天<a href=介绍了liavatc.net, 实时收听确实很有现场感,但是语速太快,试了几天觉得还是很难听懂,有什么更好的方法没有呢?
继续查了查,发现liveatc.net还有一个很好的archive功能,以往的ATC都是可以下载的, 这个很有用嘛。比如肯尼迪机场的archive页面, http://www.liveatc.net/archive.php?m=kjfk_twr 选择日期和时间带后,就可以进入mp3的播放和下载页面,很方便不是?
但是还有一个问题,ATC的对话是不连贯的,每个对话之间总有几十秒甚至数分钟的空白间隔, 听起来效率很低。 于是就考虑有没有方法把mp3文件里的无声空白删去的方法,网上查了查终于找到一个好软件 -- Audacity 。 这个软件功能很强大,貌似能做很多事情,不过自己只不过用Trancate Silence一个功能而已已经很满足了。
使用方法如下: 首先下载 里的Audacity 1.3.14 , 解压后把Audacity.app 拖到Application目录下即可使用。 然后打开刚才下载的ATC音频文件,比如 KJFK-Twr-Jan-08-2012-1630Z.mp3 选择Effect菜单,点击Trancate Silence…命令,即可把所有空白自动删除,把原来的音频压缩成较小的文件。
如果想把文件再存成另一个mp3文件,可以打开File菜单,选择Export命令,这时会弹出一个对话框让你选择文件名,扩展名,目录等等。要注意的是如果想存成mp3形式的文件,需要事先安装Lame mp3 encoder Library,不过也很简单,打开http://lame1.buanzo.com.ar/, 下载Lame_Library_v3.98.2_for_Audacity_on_OSX.dmg, 然后安装就是了。
下面是本人制作的一个样本,你可以试试看自己的听力如何。 <a href=KJFK-Twr-Jan-08-2012-1630Z.mp3
延伸阅读:
<a href=空中交通管制ATC (Air Traffic Control) 基本知识 -1
 <a href=空中交通管制ATC (Air Traffic Control) 基本知识 -2
<a href=ATC的听力练习方法–liveatc.net
空中交通无线电通话用语–中国民用航空总局
航空知识信息汇总
<a href=空中交通管制ATC (Air Traffic Control) 基本知识 -2
<a href=ATC的听力练习方法–liveatc.net
空中交通无线电通话用语–中国民用航空总局
航空知识信息汇总 -
又升级了: X-Plane 10.03 Release Candidate 2
看起来这次的更新就是修改了些小错误,一个是修改了某些地点的几何错误使正面房顶别拉长到空中,另一个是 在某些不支持的老硬件平台上运行时给出明确的错误信息停止运行。
-
练习大坡度转弯steep turn的心得
这两天在练习大坡度转弯steep turn。 前几天看一些在美国学飞行驾照的人的博客,一般在一两次飞行之后就要练习这个项目, 而且一般人开始时要想维持一定的高度同时保住45度坡度很困难。
为了试试在X-Plane上自己能否做到,所以也飞了几次,果然高度控制的很差,一下跌下500英尺。。。
于是查查资料学习看,比如这本 Rod Machado的地面飞行学校.pdf 里面的第九课就写到:
" 大坡度转弯是迈向进阶飞行的踏板,常常练习,你将发现自己在飞行控制方面愈渐纯熟。。。
你可以在飞机急转弯时,要籍着外面的视觉线索做判别依据。。。
在飞行模拟时,飞机滚转进入45度坡度转弯时,需要逐渐加大俯仰角度,直到成为6度机鼻向上姿态为止。接着应该监看高度表来决定哪一类的小俯仰修正是维持现有高度所需要的。 诀窍无他,就是进行小规模的修正,眼睛盯着高度表别让飞机往下掉就是了。
在必要时以副翼的压力来抵消加大坡度的力量。在摇杆上施力以维持高度时,可能需要以摇杆朝向反方向移动副翼,以防坡度过倾。
配平是控制飞机维持在某个飞行阶段一段较长时间时才需要,大坡度转弯瞬息万变,通常不需要配平飞机。 你必须籍着施加在摇杆上的后拉力量,来警告你飞机在高空速时接近失速的状态。这也是我们在大坡度转弯中不配平的原因。
维持高度变动在100英尺范围内,空速改变不超过10节,转弯后偏离方向不超过10度。 "
继续练习了几次,感觉不关于关注仪表,更把注意力放到大地和驾驶舱的角度上还是很重要的。 尤其是记住45度时地平线和飞机操作面板的位置和角度的关系,然后在飞机偏离这个位置以后,不断拉或者推杆把它校正,或者在坡度过大时向反方向轻轻横滚一下是角度回复,使用这个技巧现在高度的变动基本可以控制在100英尺左右了吧。
另外下面youtube的视频也可以值得参考一下。