飞行模拟知识库
-
X-Plane 10 Global Digital Download Edition
-
防冲出跑道系统ROPS
看到Airbus的防冲出跑道系统(Runway Overrun Prevention System,简称ROPS)的新闻, 其ROPS应用于A330系列飞机日前成功获得了欧洲航空安全局(EASA)的适航认证。 空客ROPS应用于A330获认证,ROPS覆盖空客全机型 A330のオーバーラン防止装置、EASAが認可
抄录一下ROPS的资料,按照上面中国民航网中的说明, ROPS本质上是一个警报系统,它可以帮助提高飞行员在降落时的情境意识, 降低飞机冲出跑道的风险,而且在必要的情况下,该系统可以为飞机提供主动保护。 从现在开始,空客所有机型都能够在出厂时就安装ROPS, 而且所有在役的空客飞机也都可以通过改装来安装ROPS。
跑道偏离(runway excursion)是指飞机从侧面或者从尽头冲出跑道, 它很长时间以来都是造成民用航空器事故的主要原因之一。
拥有专利技术的空客防冲出跑道系统已经成功获得了EASA、FAA和CAAC的适航认证, 它可以计算飞机降落时的最小空中着陆距离和在地面上的制动距离, 并且将计算出来的数据与机场跑道的实际情况进行实时对比。 该系统的数据库不仅涵盖了天气因素、跑道条件、地形地貌, 还涵盖了飞机重量及构型等多个方面。
通过电脑的分析,空客防冲出跑道系统可以在不同情况下向机组人员进行紧急语音提示、报警等, 从而协助机组人员在是否复飞的决定过程中做出正确的选择, 或者在着陆过程中帮助机组人员快速地应用停止装置。
再看一个空客的资料, Runway Overrun Prevention System ROPS = ROW + ROP ROW: 冲出跑道警告 Runway Overrun Warning ROP: 冲出跑道保护 Runway Overrun Protection
比如如果湿跑道情况下,冲出跑道警告距离大于剩余跑道长度的话, 并且飞机高度低于400英尺时,ROPS将会在PDF中显示出琥珀色的警告信息, 该信息会闪烁显示9秒钟。
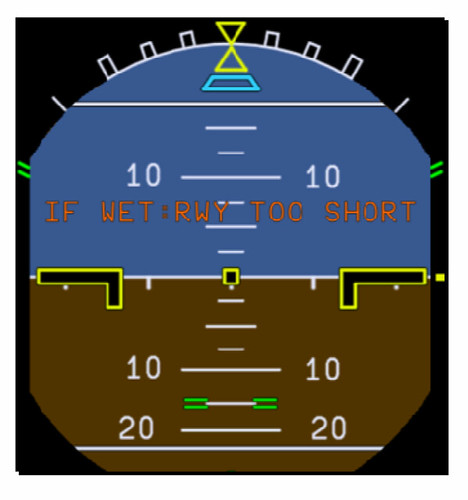
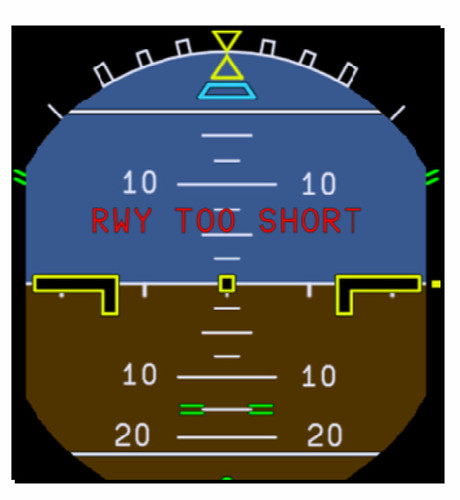
在干跑道情况下,冲出跑道警告距离大于剩余跑道长度的话, 飞机高度低于400英尺时,ROPS将会在在PDF中显示9秒的红色闪烁报警, 高度低于200英尺时,将会发出紧急语音提示"RWY TOO SHORT"。
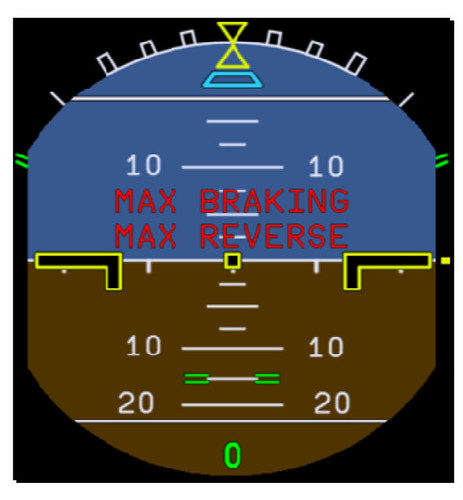
如果冲出跑道保护的距离大于剩余跑道长度的话, 可以在PDF上看到红色的报警信息, 并且连续发出"BRAEK… MAX BRAKING"和"SET MAX REVERS"语音提示, 提醒飞行员使用最大的刹车和反推; 在速度80节以下后,如果仍然跑道长度不够的话, 还会继续发出一次"KEEP MAX REVERSE"语音, 提醒飞行员继续保持最大的反推。
完
-
北京的目视进近程序
阅读AIP的更新情报也是一种消闲, 看到北京国际机场ZBAA将从8月1日起启用目视进近程序(Visual approach procedure), 到9月3日的24点结束,不知道是针对什么活动用的。 不管怎样是个新学习点,写个简单的笔记。
看图,目视进近使用的RWY01,条件是 PAPI工作正常 ILS工作 雷达工作正常 怀柔VOR/DME(HUR),官庄VOR(PEK),北京/首都DME(INJ)工作正常 云底高900米 视程10公里以上
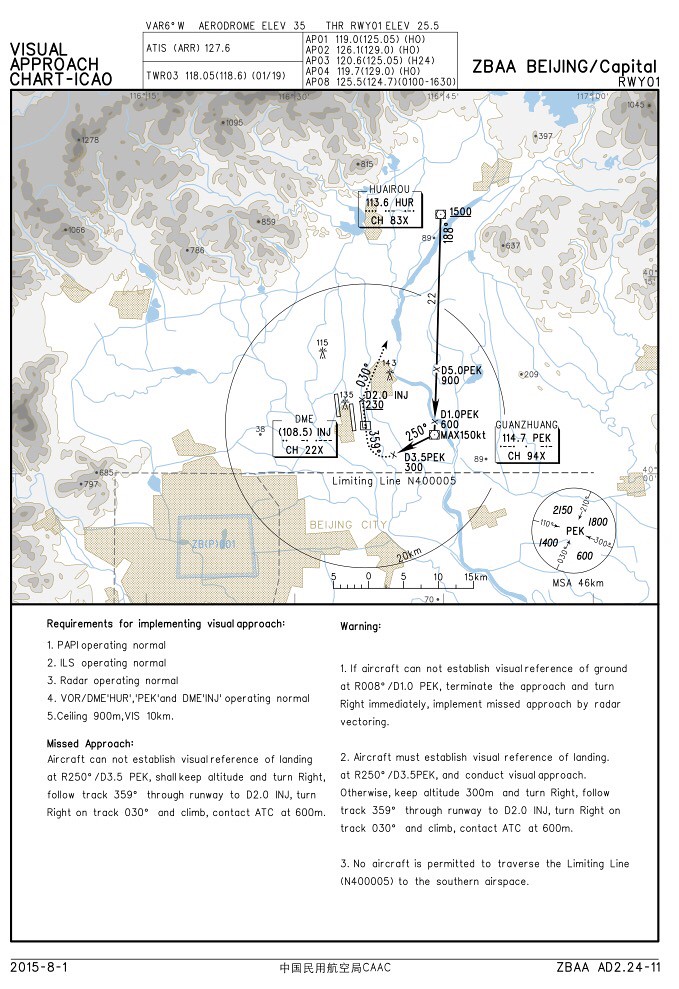 路线从怀柔VOR开始,高度1500米,航向188度,
至管庄VOR 5公里高度900米,
管庄VOR 1公里高度600米,空速150节以下 如果看不到地面需要立即右转并复飞Missad Approach
切管庄VOR 250度航向
管庄VOR 3.5公里处 高度300米 如果还没有看到降落目视参考点的话,执行Missad Approach
路线从怀柔VOR开始,高度1500米,航向188度,
至管庄VOR 5公里高度900米,
管庄VOR 1公里高度600米,空速150节以下 如果看不到地面需要立即右转并复飞Missad Approach
切管庄VOR 250度航向
管庄VOR 3.5公里处 高度300米 如果还没有看到降落目视参考点的话,执行Missad Approach
复飞的程序是保持300米高度右转, 沿跑道方向的359度飞到INJ 2公里后右转航向30度并爬升, 在600米高度联系ATC。
完
其他参考资料
<a href=http://www.caacnews.com.cn/newsshow.aspx?idnews=259217>国内首次实施 首都机场多跑道目视进近方案
-
日本航空法对无人机的规定
日本政府本周修改了航空法,增加了对无人机的规定, 虽然内容不多,只有寥寥数百字, 但是专门为无人机开设了一个新的章节「第九章 無人航空機」, 可以看出还是对这一新生事物的重视。
下面简单介绍一下其内容。
一是飞行空域的规定,除了下面的条件以外必须向有关部门申请, 1 飞行时间为日出之后,日落之前 2 必须目视随时监视无人机以及周围的状况 3 必须要和人和建筑物等离开一定的距离 4 不得进入节假日,公开活动,展示会等群众集会的场所 5 不得携带易燃易爆物,或者其他容易伤害他人或者地面建筑物等的物品 6 不得投放容易伤害他人或者地面建筑物等的物品
再就是对于违反以上规定的人,处以50万日元以下的罚款。
航空法属于航空方面的一个基本法, 比如上面的第3点里就没有具体的距离的规定, 因此估计今后还会制定一些更详细的条文。
完
关于中国大陆的无人机规定的参考 http://www.guokr.com/blog/744056/ http://proarticle.ccaonline.cn/20150115/3298.html
-
Saitek Pro Flight BIP在X-Plane上的配置方法
赛钛客的BIP飞机状态显示面板(Pro Flight Backlit Information Panel)使用背光信息面板给用户超过50个信息命令,如发动机,燃料,电源,自动驾驶等各种仪表状态。用户可以定制自己的信息面板显示飞机有关的信息,并且根据个人喜好允许不同的命令显示不同颜色(红,绿,琥珀色)。

自己手头没有BIP,但是台湾的Charles Washington 先生提供了宝贵的设置文档, 因此在这里总结出来,供大家参考。Charles Washington先生的原稿在这里。
首先是2个插件的下载,一是以前介绍过的<a href=Xsaitekpanels, 从org官方网站下载压缩包并解压,把Xsaitekpanels_ 2_42 里面的Xsaitekpanels目录拷贝到X-Plane的Resource的 ‘plugins’ 目录底下。 可以看到Xsaitekpanels下面有3个文件, D2B.config.txt D2B.config2.txt D2B.config3.txt 每一个文件对应一个BIP设备,如果只有一个的话,使用的就是D2B.config.txt。
让我们看一看D2B.config.txt的内容,比如
This will turn on the top row first indicator red if the first geterator is off #SET BIP A 0 R FROM ARRAY sim/cockpit2/annunciators/generator_off 0 RANGE 1 TO 1 This will turn on the top row second indicator red if the voltage is low #SET BIP A 1 R FROM DATAREF sim/cockpit/warnings/annunciators/low_voltage RANGE 1 TO 1 This will turn on the top row third indicator red if fuel is low #SET BIP A 2 R FROM DATAREF sim/cockpit2/annunciators/fuel_quantity RANGE 1 TO 1 This will turn on the top row fourth indicator red if the parking brake is on #SET BIP A 3 R FROM DATAREF sim/cockpit2/controls/parking_brake_ratio RANGE 1 TO 1 This will turn on the middle row first indicator if oil pressure is low #SET BIP B 0 R FROM ARRAY sim/cockpit2/annunciators/oil_pressure_low 0 RANGE 1 TO 1 This will turn on the middle row second indicator is oil tempature in high #SET BIP B 1 R FROM ARRAY sim/cockpit2/annunciators/oil_temperature_high 0 RANGE 1 TO 1 This will turn on the middle row third indicator if the vacuum is low #SET BIP B 2 R FROM DATAREF sim/cockpit2/annunciators/low_vacuum RANGE 1 TO 1 This will turn on the middle row fourth indicator if the auto pilot is turned off #SET BIP B 3 R FROM DATAREF sim/cockpit2/annunciators/autopilot_disconnect RANGE 1 TO 1
其实它的语法还是比较容易理解的, 也就是使用#SET命令对BIP的每一个显示单元赋值,比如 #SET BIP A 1 R FROM DATAREF sim/cockpit/warnings/annunciators/low_voltage RANGE 1 TO 1 对BIP的"A 1"号小面板,即第一排第二个设为红色(R), 其数值根据系统的电源电压是否过低,当该数值为1时即点亮该小面板。
-
coupled approach
1 这实际上就是我们常说的某款飞机能否自动跟随航道和下滑道的时候使用。 在欧洲飞通航也常用ILS和MLS但很多旧飞机未必有自动驾驶能自动跟随。
2 An instrument approach performed by the aircraft autopilot, which is receiving position information and/or steering commands from onboard navigation equipment.
In general, coupled non-precision approaches must be discontinued and flown manually at altitudes lower than 50 ft below the minimum descent altitude, and coupled precision approaches must be flown manually below 50 ft AGL (above ground level).
Coupled and autoland approaches are flown in VFR (visual flight rules) and IFR (instrument flight rules). It is common for carriers to require their crews to fly coupled approaches and autoland approaches (if certified) when the weather conditions are less than approximately 4000 RVR (runway visual range).
-
ILS信号的干扰
读台湾的飞航自愿报告系统的飞安简讯,看到信号干扰对ILS的影响致使自动降落的飞机落地时偏离跑道。 以前就听<a href=前辈说起过这种事,但是没有想到会这么严重,因此在这里抄袭下来。
------原文开始------- 某航班獲航管許可,使用桃園機場23R跑道ILS (Instrument Landing System)進場,飛航組員於天氣良好狀況下使用自動落地,但未事先通知塔臺,進場過程中於距離機場約4浬時,塔臺許可另一架A320型機於同一跑道起飛,導致事故機落地時,因離場航機飛越該跑道儀器降落系統之敏感區域,導航信號受到干擾。
事故機於接近平飄階段航跡開始右偏,並於跑道中心線右側觸地,飛航組員於落地過程中未能適當控制航機, 未保持警覺,於自動駕駛出現不預期操作時,立即解除自動駕駛,改以手控方式操作航機,致航機落地後偏出跑道。
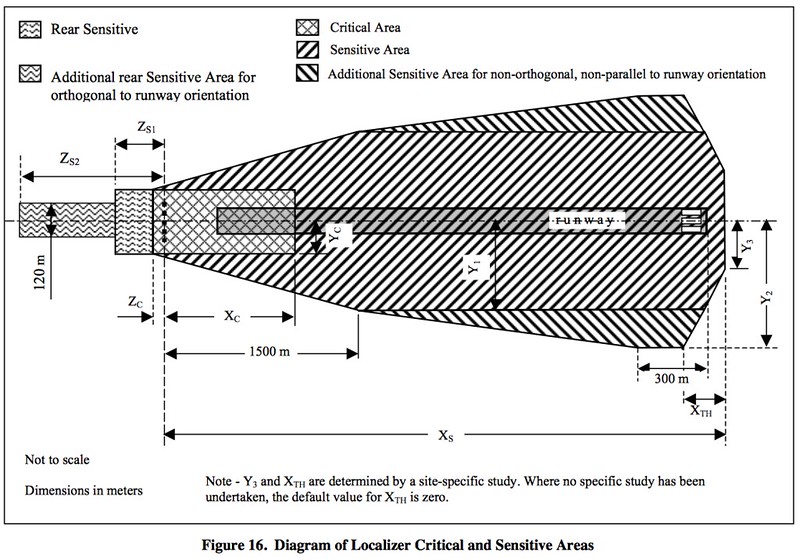
參考美國聯邦航空總署發行之航空情報手冊(Aeronautical Information Manual, AIM)第1-1-9節ILS K項-ILS信號干擾說明, ILS左右定位臺及下滑道信號都會受到地面車輛或飛機的干擾,於是機場在ILS左右定位臺及下滑道信號發射臺附近,設置有ILS精確進場臨界區域(ILS critical areas),當雲幕高低於800呎及/或能見度低於2哩,到場航機位於ILS最後進場點與機場之間,車輛與航機是不被允許進入ILS精確進場臨界區域。當雲幕高大於800 呎及/或能見度大於2哩,ILS精確進場臨界區域則不被保護,在此情況下,實施自動駕駛落地或複合式進場 (coupled approach),飛航組員應告知塔臺,以確保 ILS精確進場臨界區域被保護。
該機飛航組員於此次進場,未通知塔臺將實施自動駕駛落地,因而塔臺並未管制臨界區域內之航空器,亦未通知事故機左右定位臺訊號未受保護,致使該機以自動駕駛落地方式落地時,因左右定位臺訊號受干擾而影響其正常功能。經檢視該公司航務手冊相關內容,並未規範飛航組員於天氣良好狀況下實施自動落地時,應告知航管之相關內容。
該機於落地前約10秒,左右定位臺受到離場航機影響干擾,開始顯示航機位於跑道中心線左側,當時自動駕駛是設定在「Localizer」狀態然後轉換成「Rollout」狀態,自動駕駛應會跟隨左右定位臺訊號引導操控飛機,因此航機會右轉以達到與左右定位臺零偏離之狀態。落地前約5秒,飛航組員曾使用駕駛盤與方向舵踏板,以強制取代(override,使自動控制暫時失效,改用手控操作)自動駕駛之模式,向左修正航機之飛航方向,顯示飛航組員企圖保持航機在跑道中心線上,但飛航組員解除此一手控操作後,自動駕駛立刻以右滿舵之操作跟隨受到干擾之左右定位臺訊號, 致使航機機身主輪皆在跑道中心線右側觸地,落地後約 2秒,右翼主輪偏出跑道邊線。
波音航務評論(Flight Operations Review)不建議於自動駕駛模式下以強制取代自動駕駛之操作來取代解除自動駕駛,因強制取代操作需使用很大之力量,不易持久。
------原文结束-------
笔记 1 ILS critical areas在什么位置?网上找到这张图,可以看到定位台天线附近斜方格阴影的部分为Critical Area
2 原来override自动驾驶时,如果没有足够大的力量,飞行员是干不过自动驾驶的。。
3 coupled approach是什么?
完
-
复兴航空公司GE235航班事故事实资料报告
昨天台湾飞航安全调查委员会发布了复兴航空公司GE235航班事故事实资料报告(英文)和记者会简报档(中文)。比起<a href=以前的总结,新报告有非常详细的资料,但是因为是英文的,也就没有全部读,选择部分自己感兴趣的看了看。
先看中文的简报,致命的地方在这里:
1052:38時 該機通過1,200呎,駕駛艙出現警告聲響; Engine and Warning Display (EWD) 上出現"ENG2 FLAME OUT AT TAKE OFF"之程序 1052:43時 PF道: 我把一號發動機收回來; PM回答: 等一下 cross check; 此時ENG1油門位置紀錄由75 度收至66度 1053:00時 PM:好 engine flame out check。 繼續說 :check up-trim 有,auto feather 有 1053:06時 PF:number one收回來; 之後ENG1油 門被收至49度, 同時PM:好 現在確定是二號 engine flameout 1053:09時 PF回答:好; ENG1油門仍保持於49度 位置
对于2号发动机的报警,PF马上关掉自动驾驶,然后开始收1号发动机油门,尽管PM说了二号发动机,但是PF好像没有注意到,之后仍然继续把油门关掉,而且PM居然也没有发现这个错误,没有尽到监视的责任,最后造成机毁人亡的巨大悲剧。
不知道为什么PF会听到报警后马上关掉自动驾驶。看了一下报告书中提供的发动机失效程序,
 ENG1(2) FLAME OUT IN FLIGHT项目中只有两项,一是收油门PL(Power Lever) affected side – FI(Flight Idle),然后是当高速涡轮机转速NH低于30%,收CL(Condition Lever) affected side – FTR(feather) THEN FUEL SO(Shutoff)顺奖和关断燃油,所以PF的操作方法是正确的,只不过需要关闭的对象搞反了。
ENG1(2) FLAME OUT IN FLIGHT项目中只有两项,一是收油门PL(Power Lever) affected side – FI(Flight Idle),然后是当高速涡轮机转速NH低于30%,收CL(Condition Lever) affected side – FTR(feather) THEN FUEL SO(Shutoff)顺奖和关断燃油,所以PF的操作方法是正确的,只不过需要关闭的对象搞反了。 -
台湾的航管监视最低高度图ATC Surveillance Minimum Altitude Chart
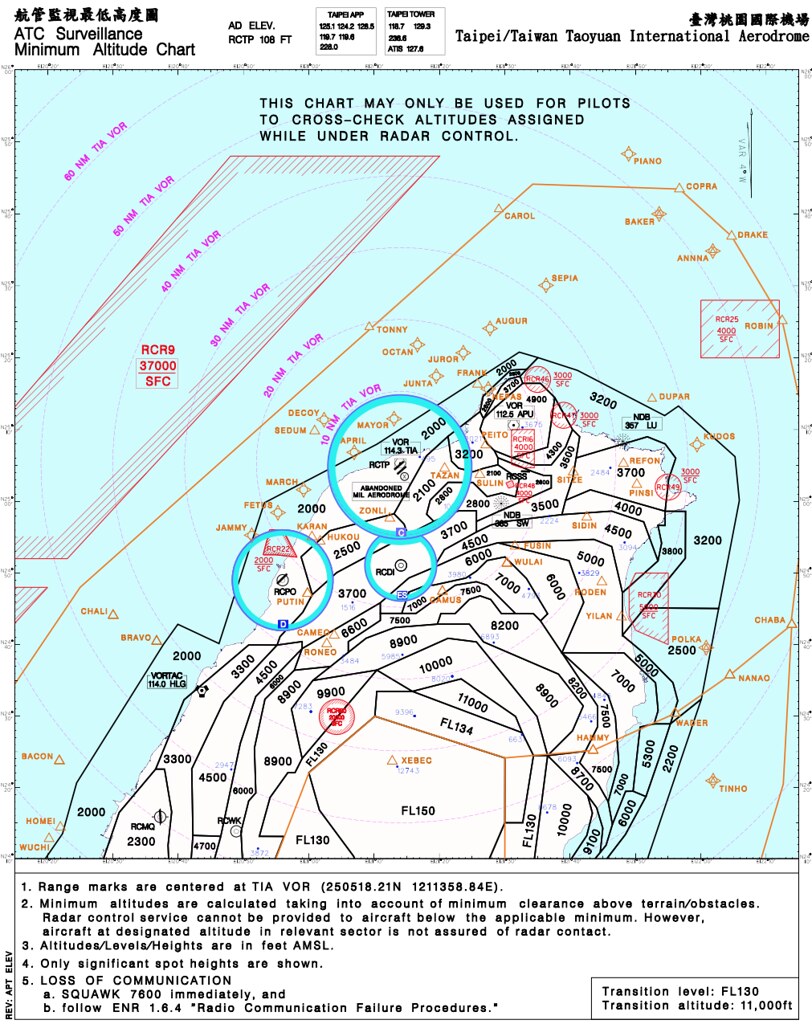
真是孤陋寡闻,今天看台湾的AIP电子式飞航指南,发现不少机场图里都有提供ATC Surveillance Minimum Altitude Chart,并且翻译成航管监视最低高度图,学习了。
比如桃园机场
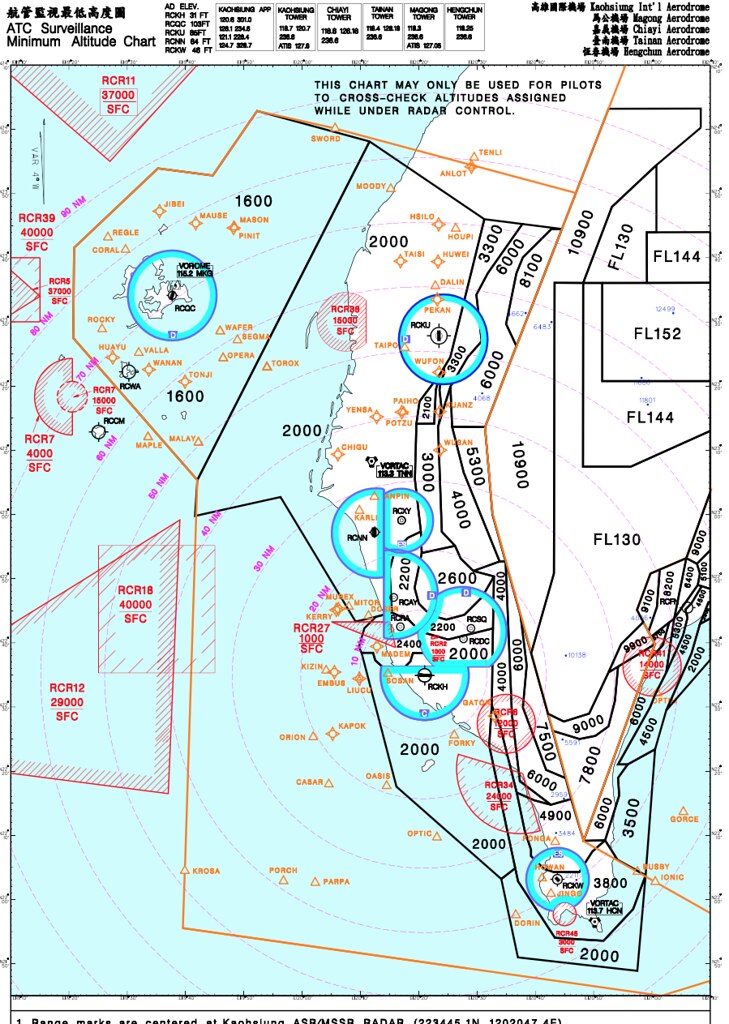
高雄机场
 松山机场
松山机场
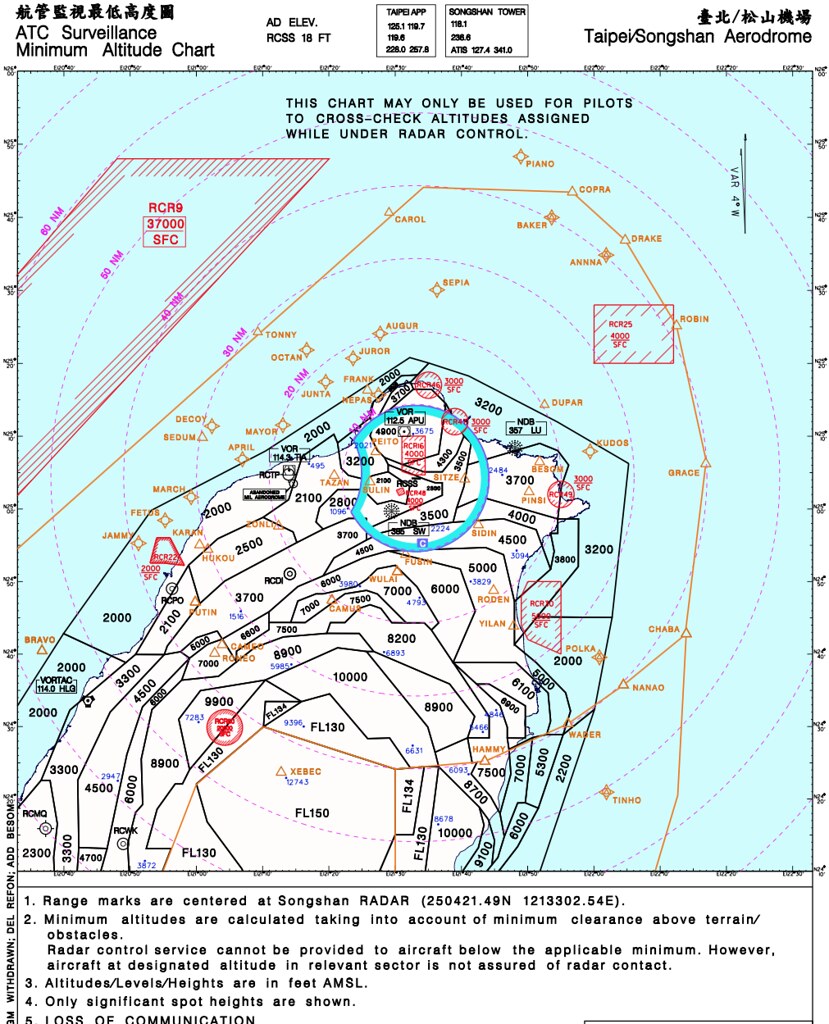
这3个航图都密密麻麻的标满了扇区,看起来很费劲,不知道分的这么细,飞行员有那么多时间,监视的过来吗?真的有些困惑。
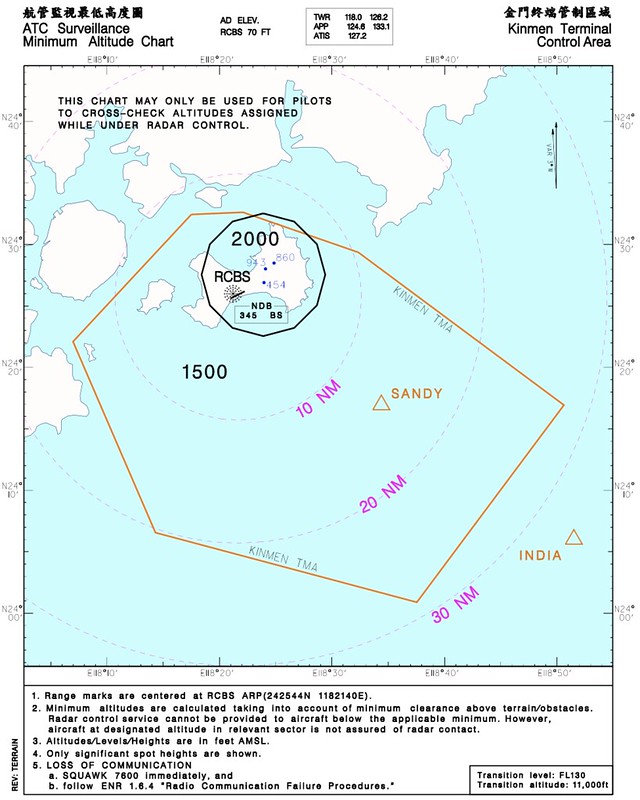
再看金门的,这个又太简单了吧,怎么觉得专门分出来做一张图有些可惜了。。
-
一些航路更新
中国大陆 <a href=/x-plane10/view.php?file=doc/IFRMFCNr1507.pdf>离境国际航路International Flight Routes from Mainland of China Nr1507 <a href=/x-plane10/view.php?file=doc/IFRTMCNr1507.pdf>入境国际航路International Flight Routes to Mainland of China Nr1507 <a href=/x-plane10/view.php?file=doc/OFRNr1507.pdf>通过国际航路Overflying Flight Routes Nr1507 <a href=/x-plane10/view.php?file=doc/RFRNr1507.pdf>港澳台区域航路Regional Flight Routes Nr1507
日本 <a href=https://yinlei.org/x-plane10/view.php?file=doc/JP-eAIC-2015-032-en-JP.pdf>飛行計画経路20 AUG 2015 飛行計画経路30 APR 2015
美国 NFDC Preferred Routes Database Query NFDC Preferred Routes Database
-
读日本航空安全报告系统ASRS报告
以前介绍过中国大陆和台湾的<a href=航空安全报告系统ASRS,最近日本的ASRS也开始了,它的系统名字叫做航空安全自発報告制度(Voluntary Information Contributory to Enhancement of the Safety),简称VOICES,其登记系统使用一个不同的URL,在这里。
现在VOICES发布了两个信息反馈,以季刊的方式在网站内公开,即去年12月的No.2014-001号和今年3月的No.2014-002号。读了一下发现这里的信息除了反应问题的以外,还有不少是航空从业人员的反省和信息共享,这也许和国民性有关吧。
下面就挑几条看一看。
1 飞行员报告在向仙台机场进近中1500英尺高度时,突然出现很多气球,估计是附近在办结婚仪式。此次虽然对飞行没有大的影响,但是今后还是要注意。
2 飞行员报告平行跑道进近中,进近发来的指令时间比较晚,并且话比较长,影响了ILS方向台转弯的实际。结果飞行员在联系塔台时被告知overshoot了。
3 从W滑行道拐入羽田机场Spot5时,由于Spot5是在W和H滑行道的角上,结果前面有一架在H上的飞机,能够拐弯的空间非常狭小,差点发生碰撞,希望ATC今后能够注意。
4 进入驾驶舱后调节脚舵位置,发现里面掉了一个被落下的饮料塑料瓶!
5 成田进近时,根据ATIS时做的计划都发生了变化,先是ILS,然后是STAR航路点,之后跑道也发生了变化,结果飞行员不停的操作FMS,占用了对仪表和外部监视的时间。
6 小型飞机进行10000英尺高度以上的飞行,飞行员没有事先对乘客说吗缺氧的症状。结果一名乘客发生了因缺氧而牙疼的现象。
7 一些外国乘客携带了自己的扩展用安全带乘机,这是需要禁止的行为。
8 起飞后40分钟后空乘发现3座一排的乘客居然有两个大人抱着婴幼儿,估计是走道一侧的乘客把原来安排坐在别的位置上的小孩抱了过来。因为3座的坐席只有4个吸氧面具,如果发生意外的话这样就不能保证所有人都能使用氧气,因此把小孩换回到原来位置。
9 起飞后遇到很强的锋面气流,使用VNAV PATH模式爬升,但是速度越来越慢,Pitch最大达到了15度,垂直速率最大达到了8000ft/min。SPD设定到280,但速度到了250以下。后来切换到VS模式,设定为1000ft/min,但速度还是在减少。于是接除自动驾驶,手动押Pitch使速度回复到正常值。
10 得到机场放行比较晚,之后的关舱门的时候推车还没有就位,结果请求pushback时还在等推车。忙乱中退出之后才想起来忘了执行PREFLIGHT Checklist
11 下意识的把直飞航路点输入错,幸好PM提醒才没有脱离航线
12 下降中使用FLCH模式,速度在MCP的IAS窗口设定为270。之后使用VNAV并打算减速到250,并按下了MCP的MACH Selector,但是没有确认其结果,结果在FLCH中按下后灯也没有灭,但飞行员下意识的认为已经设定到VNAV中的速度值。后来在8500英尺高度时才注意到超速,使用V/S模式降低下降率,并打开减速板才把速度降到240。
13 起飞后遇到前面一架飞机的后方乱气流,Over Bank警告,AFDS(Autopilot Flight Direction System) 模式变成了CWS(Control Wheel Steering) Roll模式。之后Roll Rate回复,关掉自动驾驶重新设定HDG。
14 由于天气和交通量大,忘记了接触Speed Intervention的设定,结果10000英尺到8000英尺一段都超过了速度规定。
15 上海浦东机场靠廊桥时,使用<a href=VDGS,但由于机首轮胎出了地面的蓝色停止位置框,不得已使用推车向后推30厘米进入框内,这样廊桥才能靠上来。结果从停止后到连上廊桥PBB (Passenger Boarding System)花了十多分钟。使用浦东机场的VDGS时如果时速超过7.7公里就会显示"Slow Down"的消息,因此一定要注意降低速度。
东西太多,今天就先写到这吧。感想有两点: 一是尽管是非常有经验的飞行员也会因为认知偏误而发生错误,尽管对于飞行任务最终没有产生大的影响,但是总结经验,积极共享经验还是很重要的。 二是PF和PM的分工太重要了,即使是进近中极其忙碌的阶段,PM也不能忘记自己监视的主要责任,过多的参与PF应该负责的工作。
附录 http://jihatsu.jp/news/feedback/FEEDBACK%202014-001.pdf http://jihatsu.jp/news/feedback/FEEDBACK%202014-002.pdf http://www.abc-narita.ac.jp/25_news/Abbreviation121016.pdf
-
X-Plane 10.40 Beta 4
Beta4也出来了,看看release notes当然还是bug修正,比如QPAC的产品不能使用的问题,Plane-Maker的一些问题,还有一些比较小的问题的改善。 我试飞了近一个小时,没有发现什么大的问题,大家可以安心升级。
Fixed for Beta 4
Restored sorting and first character of apt.dat. This fixes the QPAC plugin. (bug 1673) Fixed crash in Plane-Maker on deeply animated aircraft like the Jar A330 Fixed rendering presets to have no roads in lowest setting (bug 1672). Fixed winds-aloft parser to read lat/lon stations Added ultralight classification to Plane Maker Fixed tail number bugs in Plane-Maker: empty tail numbers are allowed, 6 digit tail numbers are allowed, and existing tail numbers are not erased. (Bugs 1665,1666,1679) Disabled glideslope on AP when back course is selected (bug 1680) Better ATIS report - we now correctly report variable wind directions, and issue wind shear alerts the same time a real windshear alert system would Fixed dewpoint reporting in the ATIS ATIS now reports few clouds instead of scattered if the METAR reads ‘few’. Commands alphabetized for easier location. Default to 3-d cockpit rendering option only shows 3-d cockpit if the airplane has a 3-d cockpit (bug 1677) Nosewheel steering with tiller interpolates with rudder correctly (bug 1676) Fix for engine flooding when boost pumps are on (bug 1675) Pro-key option to not get update notifications fixed. Command interface scrolls to show all commands.
-
最低监视引导高度图ATC Surveillance Minimum Altitude Chart
闲来无事读AIP,看到<a href=中国民航eAIP中新增了一种航图—最低监视引导高度图 ATC Surveillance Minimum Altitude Chart,这是个新知识点,就查来看看。
看ICAO对ATC Surveillance Minimum Altitude Chart的说明如下: This supplementary chart must provide information which will enable flight crews to monitor and cross-check altitudes assigned while under radar control by a controller using an ATS surveillance system. 也就是在雷达引导下,机组用来交互检查和监视各个雷达引导区域和引导扇区的最低高度用的。
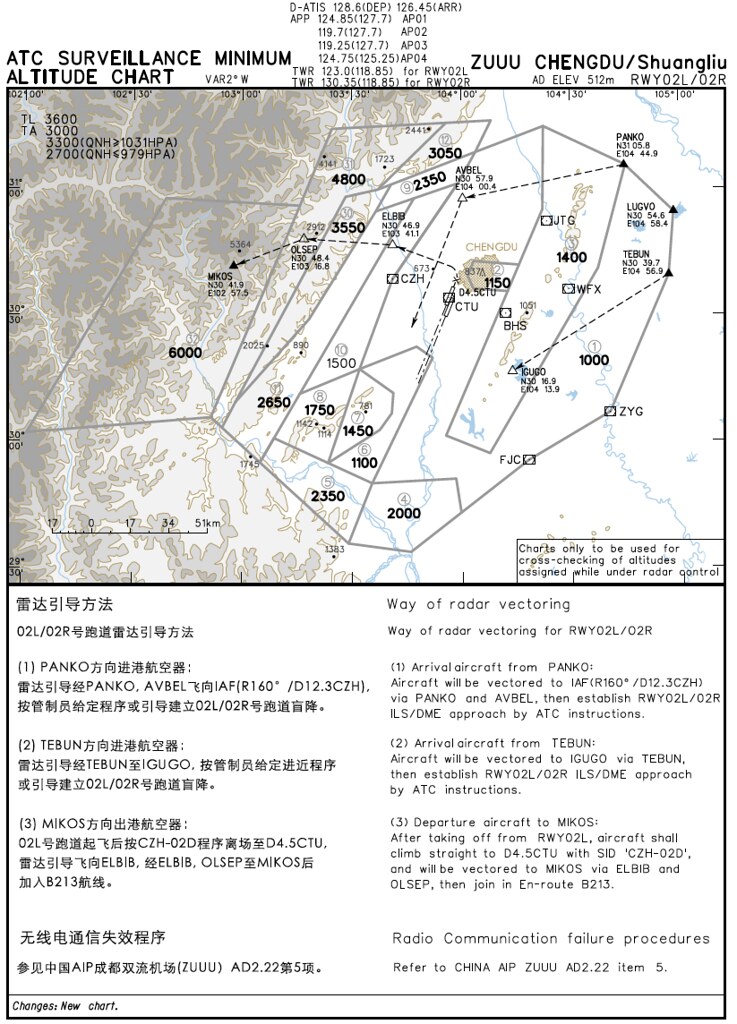
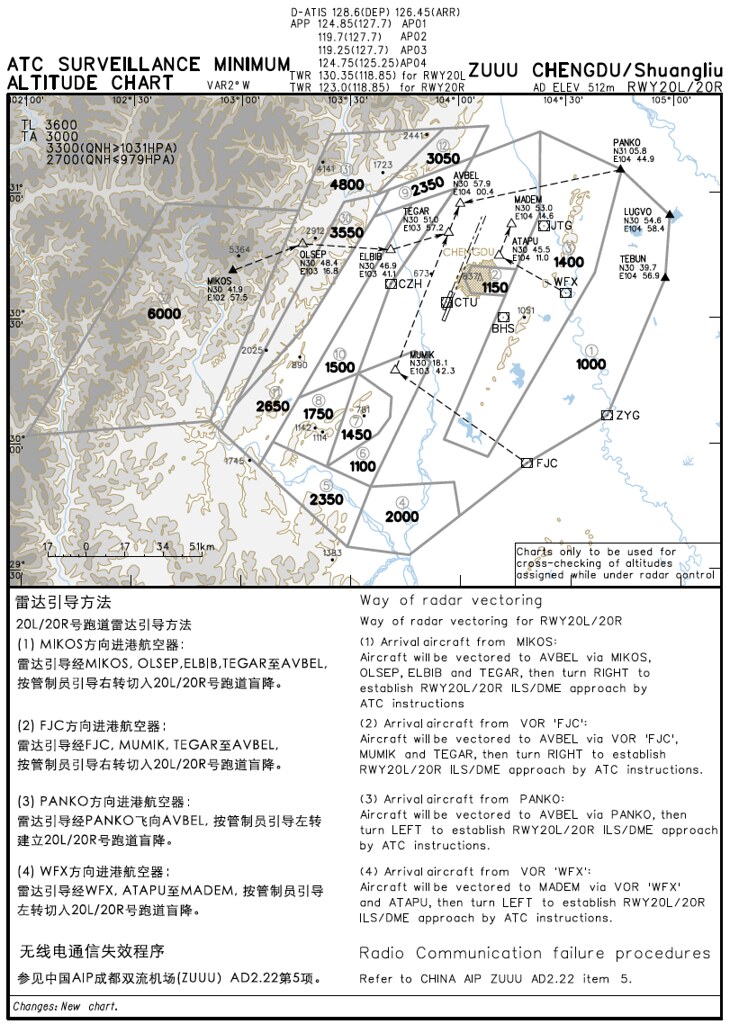
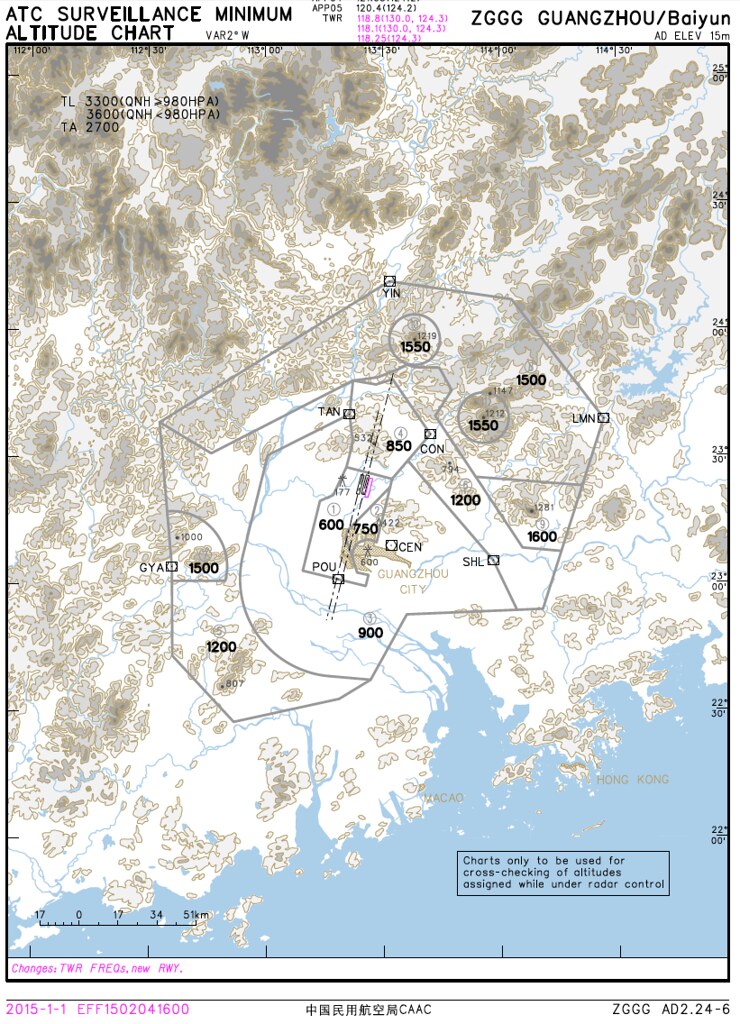
现在中国民航公布的最低监视引导高度图只有3个,即成都双流机场的02L/02R和20L/20R的两个,以及广州/白云机场的一个。
图看起来还是挺直观的,虚线标出了雷达引导时的线路示意,机组结合每个扇区的最低雷达引导高度,对安全的超障余度有个比较清晰的理解。
1 成都/双流 CHENGDU/Shuangliu ZUUU AD2.24-6A ATCSMAC RWY02L/02R
2 成都/双流 CHENGDU/Shuangliu ZUUU AD2.24-6B ATCSMAC RWY20L/20R
3 广州/白云 GUANGZHOU/Baiyun ZGGG
完
-
FlightGear试用感想
在百度贴吧看到一位美女商业飞行员介绍FlightGear—另一款著名的飞行模拟软件,于是安装并且试用了一两个小时。虽然用的时间不多,但是感觉这款软件还是可以多玩玩,比起X-Plane来,它的特点有: 1 完全免费 2 地景可以自动从网上下载,不用一个一个自己去寻找 3 体积小,下载包只不过1G,对比X-Plane的8张DVD来说,更容易安装,对网络和硬件的要求也少 4 飞行时也比较轻巧,操纵感觉比较直接,反应快,不像X-Plane那样有些迟缓沉重 5 扩展功能多,对硬件支持很好 6 3D模型的质感差些,所以看上去更像一个游戏软件,因此从真实感上来说比起X-Plane要差不少
安装之前在FlightGear的官方网站读了下文档,感觉这款软件的使用可能对一般人可能要难度大一些,环境变量呀XML设置文件什么的,用命令行来执行命令,命令行里使用各种选项什么的,还挺麻烦的。对于自己来说,毕竟用了20多年UNIX了,对这种文档觉得还挺亲切,呵呵。
但是实际从官网上下载FlightGear v3.4.0看看,倒也没像写的那么麻烦嘛,其实很单纯的。 简单总结在MAC上安装方法就是从 1 上面的网页里下载压缩包FlightGear-3.4.0.dmg,大小1.17GB。我在家里一共花了近一个小时下载完毕 2 把FlightGear-3.4.0.dmg打开,得到FlightGear.app。把FlightGear.app拷贝到Application目录下 3 执行FlightGear.app 即可,真是很简单。 上面的下载页里还有机体和地景文件可以分别下载,但是既然地景可以自动从网上下载,那么现阶段也没必要装了。
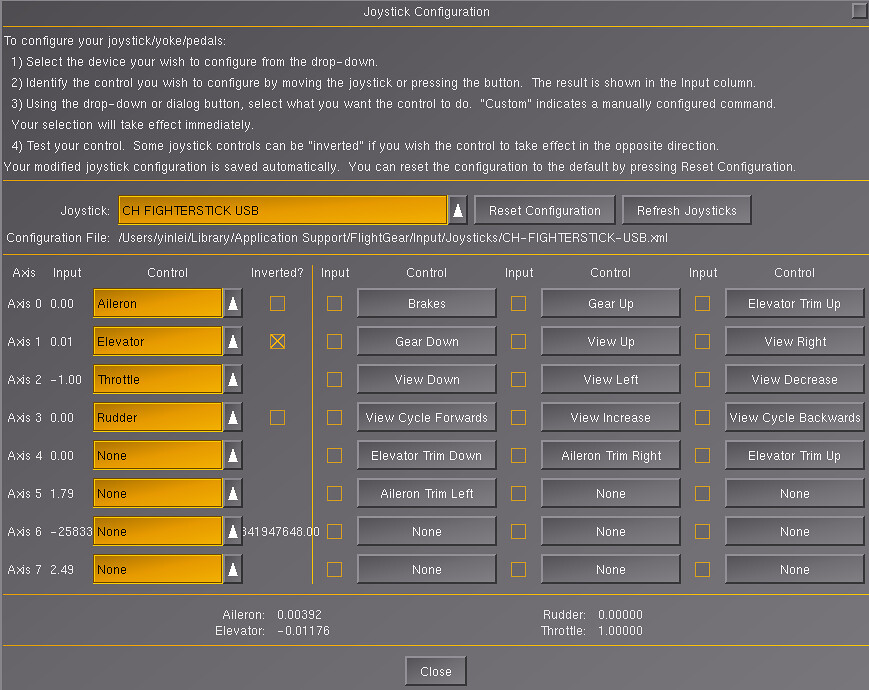
好了,运行一下试试看,点击FlightGear.app可以看到启动画面,实际上这是一个选择画面,供使用者选择本次飞行的机体,出发机场,以及天气/时间等条件:
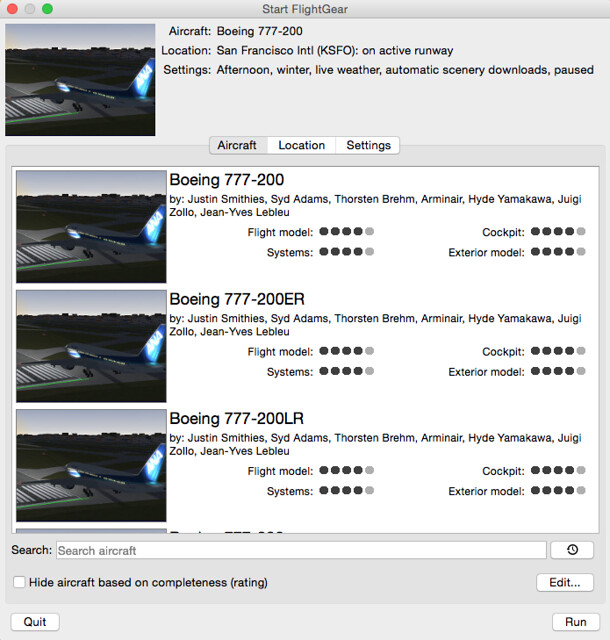
由于我没有下载机体文件,因此第一次运行时可以看到缺省的机体有波音777,塞斯纳172,比齐1900,派玻PA-34,F-14,零式战斗机等。在上面的拷屏是选择了波音777-200的机体,地点选在旧金山机场,时间为冬日的下午,天气设为实时天气,地景为自动下载时的设置。
当然了第一次飞还是比较熟悉的地方好,所以我选择了C172和羽田机场,按下右下角的Run按钮,
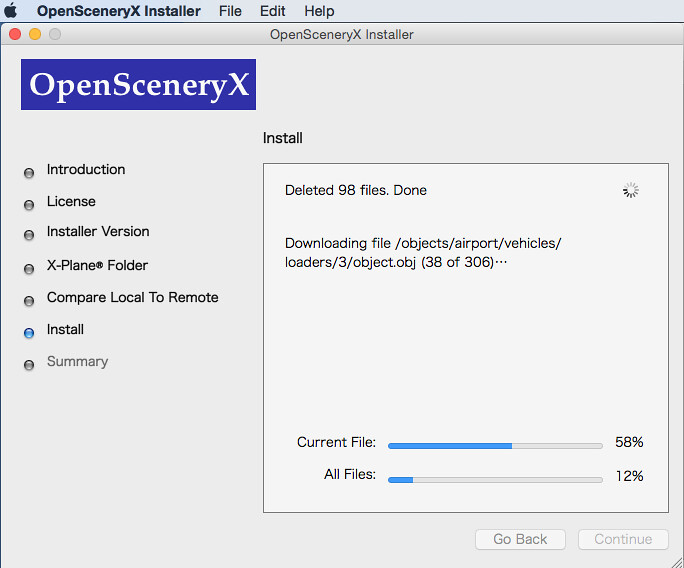
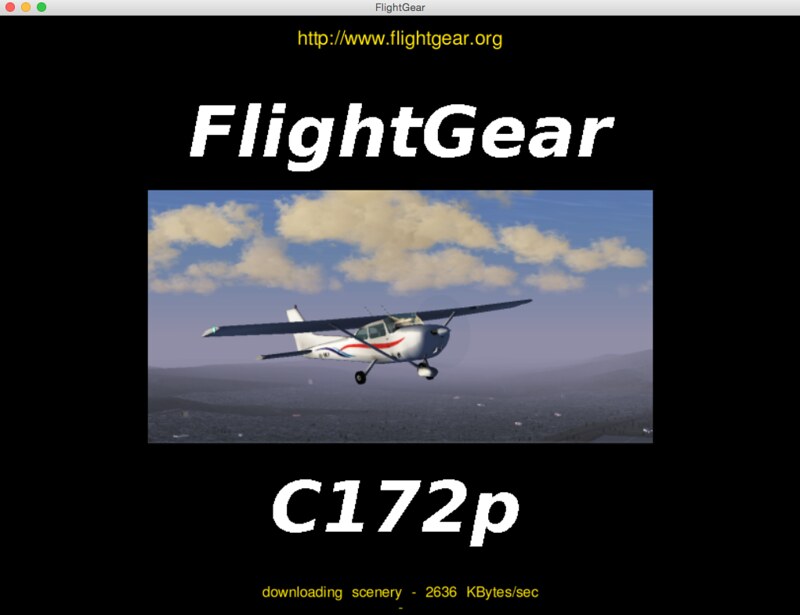 程序进入加载阶段,由于没有地景文件,所以可以看到画面下方的downloading scenery的信息。
程序进入加载阶段,由于没有地景文件,所以可以看到画面下方的downloading scenery的信息。对了,由于是测试,我只连了CH的FighterStick飞行摇杆作为外设,Saitek的脚舵和Yoke等都没有用。
1-2分钟后初始化完毕,就进入驾驶舱模式。羽田机场里的一号航站楼的模型和塔台等地景都还可以,但是不知道为什么没有二号航站楼和国际航站楼。不过4条跑道都在,地方还是一眼就能认出来的。由于对快捷键的使用方法不熟悉,点击画面上部的Help菜单,弹出ShortcutKeys的对话框,
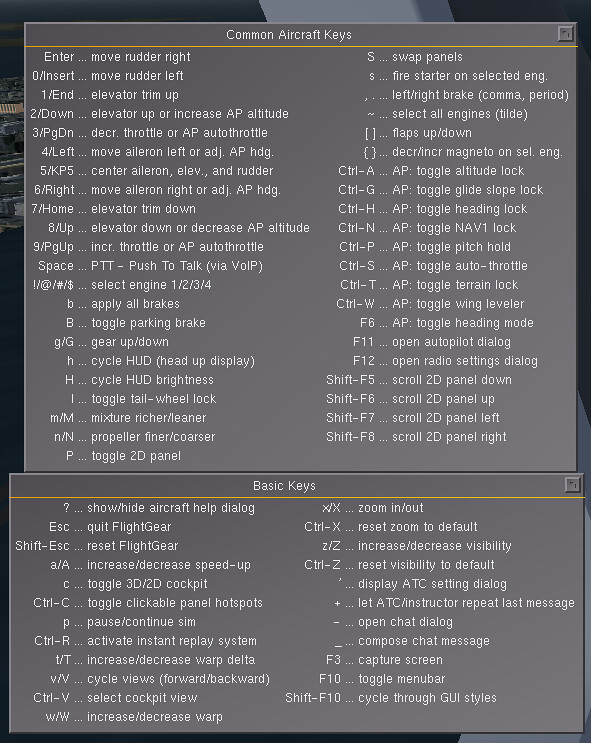 现学现用吧:
s键启动发动机
]放襟翼
推FighterStick的油门钮(貌似软件自动找到了)
B键解除停车刹车
用,和。控制左右的刹车,保持对准跑道中央
推FighterStick的油门钮到最大,飞机开始前行
用0键和Enter键控制左右rudder,尽量保持机体在跑道上直行
55节左右后拉杆,飞机开始爬升,按[收襟翼,转向往东京市内转一转,并拷屏一张
现学现用吧:
s键启动发动机
]放襟翼
推FighterStick的油门钮(貌似软件自动找到了)
B键解除停车刹车
用,和。控制左右的刹车,保持对准跑道中央
推FighterStick的油门钮到最大,飞机开始前行
用0键和Enter键控制左右rudder,尽量保持机体在跑道上直行
55节左右后拉杆,飞机开始爬升,按[收襟翼,转向往东京市内转一转,并拷屏一张

可以看到东京塔,晴空树电视塔,台场的东京湾大桥,六本木等标志性建筑物都能清晰看到,地面上的小型建筑物也都密密麻麻的,并且没有感觉显示速度有什么慢,基本还是比较流畅的。
驾驶感觉呢,就像上面说过的,比较轻巧,机体的反应很灵活,而且飞行感觉比较稳定,舵操作量要比X-Plane少一些。驾驶舱内部由于缺乏纹理感,一开始还有些不适应,不过满满熟悉了也就习惯了。仪表显示也很清晰,挺容易读取各种数据。空气动力方面也感觉比较真实,螺旋桨效应什么的都有,稳定性也不错,驾驶起来比X-Plane要轻松,挺适合新人上手的。驾驶舱内的视点会随着机体的姿态变化而发生改变,也许这也是一种对真实的模拟的,但现在还有些不太适应。
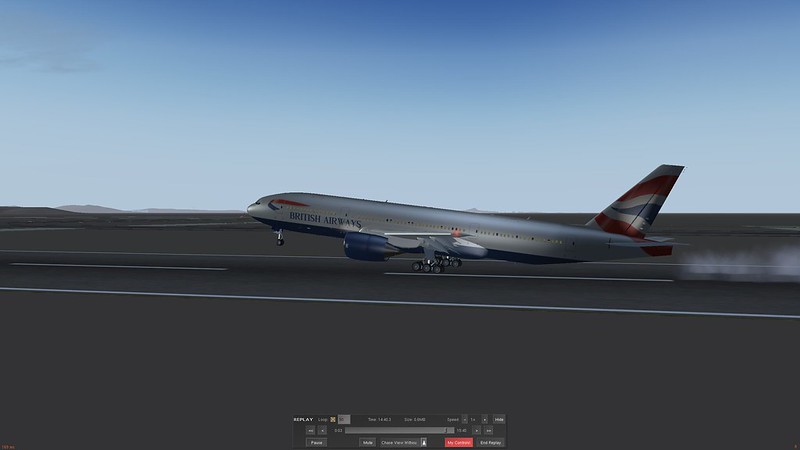
显示方面的快捷键有: v和V 各个视角的切换 Ctrl-V 切换回驾驶舱视角 x/X 放大缩小 z/Z 增大缩小视程 F3 拷屏 Ctrl-R 重放模式 p 暂停
我觉得这个重放模式挺方便的,放一张拷屏上来。
FighterStick杆上有很多键,不用也可惜,都给它们安排好,现在基本不用键盘,只用摇杆也能进行飞行操控和视角操作了:
对了,这个777的驾驶舱内部做的感觉真不错啊,让我回忆起。。。(离题了,省略1000字) 今后要多练习练习!
下一步就是要学习一下怎么把机体加进来,并试一下美女飞行员制作的Do 328了。
-
全日空 东京羽田-上海虹桥 NH1259 航班 乘坐记
很久没写这种航班的体验记录了吧,看了看上次写还是两年前的<a href=CX543那次呢。去年9月起开始<a href=日本解禁飞机上电子产品使用,但自己一直很少出门,所以体验拍摄全程飞行的机会拖了很长时间。
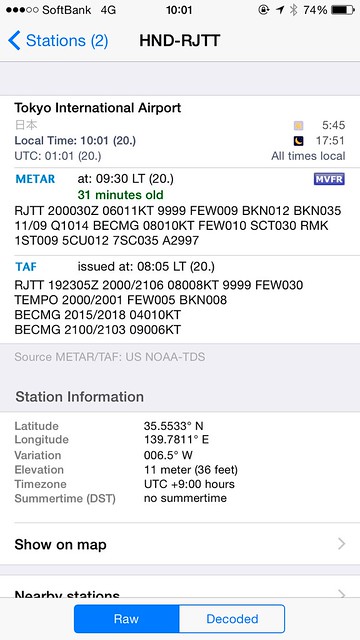
这次(N个月前)去上海订的是全日空NH1259航班,因为是私人旅行,相对便宜的经济舱加上窗口座位就相当满足。根据惯例,出发前到羽田国际航班航站楼上的展望台看看本次将要乘坐的机体,波音777-200ER的JA708A,出厂于2000年5月,生产序列号28277,Spot为110。
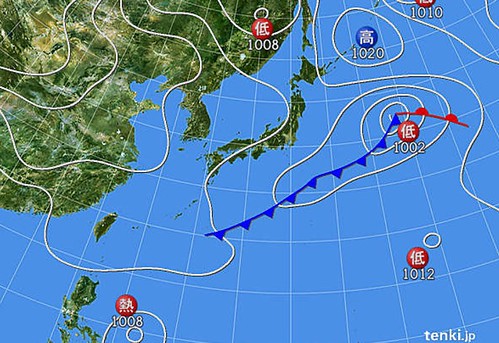
 当日天气不太好,厚厚的层云和积云覆盖着天空,
当日天气不太好,厚厚的层云和积云覆盖着天空,看天气图倒也还好,低气压已经离开,高气压未到,
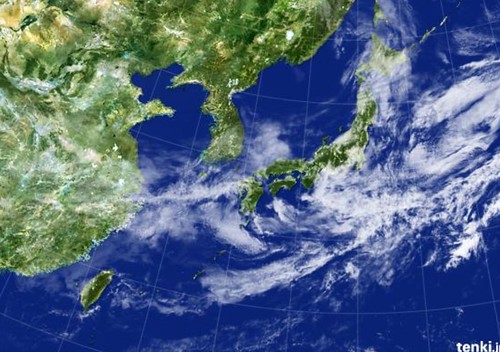
 卫星照片上可以看到云量还是很多,
卫星照片上可以看到云量还是很多,
 因此手头只放一台小卡片照相机RX100
因此手头只放一台小卡片照相机RX100和手机iPhone6登机。
飞机pushback出来以后停在SPOT109的全日空的另一架777-300ER JA785A后面,
 从我的座位看过去,正好是JA785A的正后方,这个拍摄角度很是难得,尤其是两侧的地面车辆左右还挺对称,有一种平衡美。
从我的座位看过去,正好是JA785A的正后方,这个拍摄角度很是难得,尤其是两侧的地面车辆左右还挺对称,有一种平衡美。

地面滑行以后的路线基本与上面的CX543没有区别,P4,P2,L2,A2,然后沿A滑行道一直到Y滑行道,从10点3分关舱门,7分推出,12分滑行开始,到D1的05跑道口,10点25分起飞,基本没有停顿。
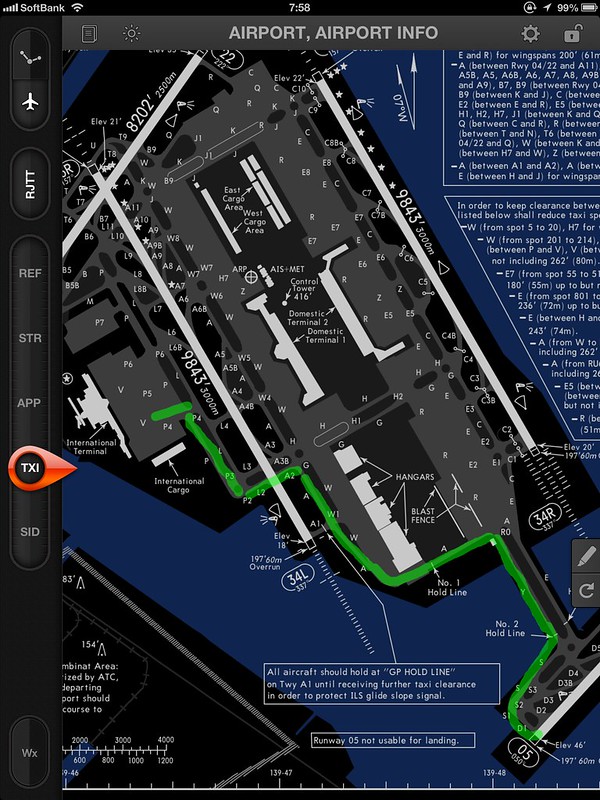
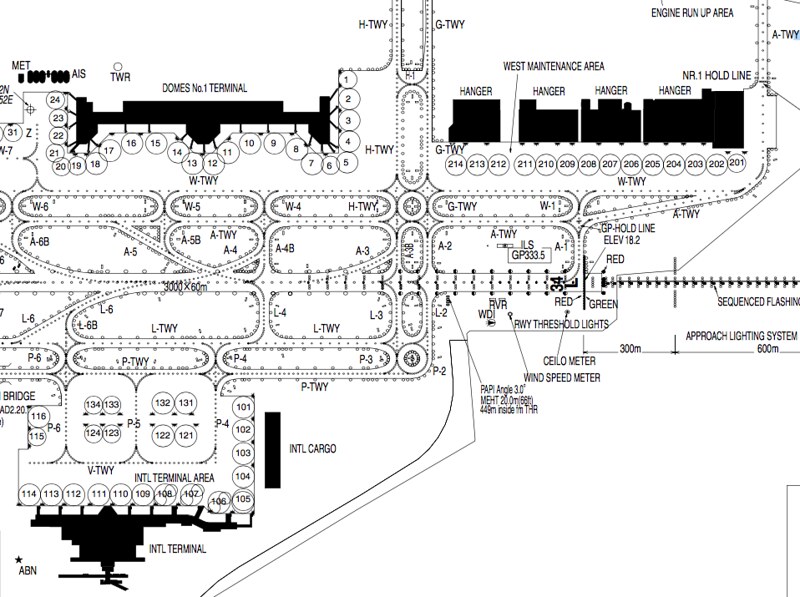
下面的地点在电子产品解禁以前都是不允许拍照的,所以不厌其烦的一张张贴出来。 在L2附近可以看到测量跑道视程的RVR透光仪和风速仪(Wind Speed Meter),
 A2和A1中间可以看到34L跑道的ILS的GS天线,
A2和A1中间可以看到34L跑道的ILS的GS天线,
 同样A滑行道向东移动时,南侧可以看到十几个储油罐,
同样A滑行道向东移动时,南侧可以看到十几个储油罐,
 接近栈桥的Y滑行道时还可以看到专用的消防车和消防站,
接近栈桥的Y滑行道时还可以看到专用的消防车和消防站,
 从Y滑行道向西转到S滑行道中,往北回头看羽田机场,栈桥,储油罐,以及远处的第二航站楼和塔台都是一目了然,
从Y滑行道向西转到S滑行道中,往北回头看羽田机场,栈桥,储油罐,以及远处的第二航站楼和塔台都是一目了然,
 S滑行道中,可以看到西侧熟悉的<a href=浮島町公園,去年写的<a href=这篇blog里对羽田D跑道的栈桥结构有过详细介绍,
S滑行道中,可以看到西侧熟悉的<a href=浮島町公園,去年写的<a href=这篇blog里对羽田D跑道的栈桥结构有过详细介绍,
 从S1向D1滑行中,
从S1向D1滑行中,
 起飞前再回头看一眼浮島町公園,呵呵。
起飞前再回头看一眼浮島町公園,呵呵。

飞机拐上05跑道,马上加速起飞,紧接着向右盘旋,使用的<a href=https://yinlei.org/x-plane10/view1.php?file=doc/AIP-J/RJTT_Tokyo_INTL.pdf>YANAG ONE DEPARTURE标准出发程序,
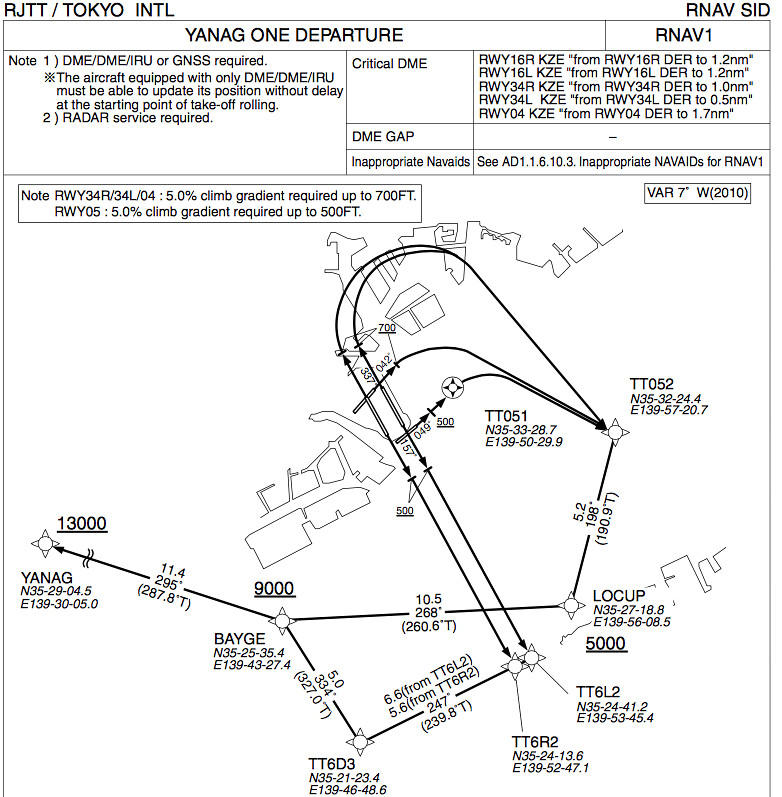 RWY05: Climb on HDG049 ̊ at or above 500FT, direct to TT051, turn right direct to TT052,
to LOCUP at or above 5000FT, to BAYGE at or above 9000FT, to YANAG at or above 13000FT.
RWY05: Climb on HDG049 ̊ at or above 500FT, direct to TT051, turn right direct to TT052,
to LOCUP at or above 5000FT, to BAYGE at or above 9000FT, to YANAG at or above 13000FT. -
X-Plane 10.40 Beta 3 Is Out
10.40 Beta 3发布了,当然了,这里没有新功能,只有bug修改,都是些beta2中小问题。
Fixed performance loss with spinning props on NVidia Windows. Fixed crash on startup for some Macs. Fixed legacy GPS/FMC not detecting KTPA and other airport codes. Fixed real weather not assigning METARs to the right locations. Fixed crash in scenery engine when objects have incorrect ordering of animations. This fixes EHLE. Scenery that -started- crashing in 1030 may start working again, but should still be fixed by their authors. Updated Magnetic Variation Fixed R22 Clutch Fixed replay of sliders Fixed bogus log messages for empty apt.dat files Fixed typos in German menus in Airfoil-Maker Fixed hobbs time to properly be saved between uses of the aircraft. Fixed new nav radio 3-10 datarefs to function properly. Fixed UI error in “operations and warnings” when USB pro key is in use Startup sequence less dark and gloomy
-
两万五千个机场地景!Scenery for 25000 small airports
对于新手来说X-Plane最不可理解的地方就是占用了几十个G的硬盘空间, 但是居然大部分机场里面都空空荡荡,基本只有一条跑道和荒地而已,让人大失所望。 慢慢适应以后,大家就会逐渐学会下载和安装各种地景插件,走出新手的阶段。
但是今天发现个比较厉害的插件,Scenery for 25000 small airports, 号称包括了2万5千个小机场的地景, 有了这个东西,光秃秃的X-Plane的地面岂不一下就改善了。
安装方法如下:
1 从上面的网址下载文件,分别有x_Prefab_Library,x_Prefab_Airports_1xp,x_Prefab_Airports_2xp三个压缩包
2 安装最新版OpensceneryX installed (2.1.1)
3 把几个压缩包解压,并拷贝到Custom Scenery目录下面
4 启动X-Plane,让"scenery_packs.ini"文件自动更新,然后结束X-Plane的运行
5 用编辑软件打开"scenery_packs.ini",把最上面的 SCENERY_PACK Custom Scenery/x_Prefab_Airports_1xp/ SCENERY_PACK Custom Scenery/x_Prefab_Airports_2xp/ SCENERY_PACK Custom Scenery/x_Prefab_Library/ 移动到各种自己的定制地景之后,防止这个地景包把你以前安装的地景覆盖, 比如我的机器上的设置如下:
SCENERY_PACK Custom Scenery/Japan Tokyo/ SCENERY_PACK Custom Scenery/RJAF Matsumoto jp/ SCENERY_PACK Custom Scenery/USA_HI_OAHU_PHNL_Honolulu Intl v2.1/ SCENERY_PACK Custom Scenery/Aerosoft - EBBR Brussels/ SCENERY_PACK Custom Scenery/Aerosoft - EDDF Frankfurt/ SCENERY_PACK Custom Scenery/Aerosoft - EDDM Munich/ SCENERY_PACK Custom Scenery/Aerosoft - EDDT Berlin Tegel/ SCENERY_PACK Custom Scenery/Aerosoft - EDLP Paderborn-Lippstadt/ SCENERY_PACK Custom Scenery/Aerosoft - EGBB Birmingham/ SCENERY_PACK Custom Scenery/Aerosoft - EGKK London-Gatwick/ SCENERY_PACK Custom Scenery/Aerosoft - EGLL Heathrow/ SCENERY_PACK Custom Scenery/Aerosoft - EGPF Glasgow/ SCENERY_PACK Custom Scenery/Aerosoft - EGSS London-Stansted/ SCENERY_PACK Custom Scenery/Aerosoft - EIDW Dublin/ SCENERY_PACK Custom Scenery/Aerosoft - LEBL Barcelona/ SCENERY_PACK Custom Scenery/Aerosoft - LEMD Madrid/ SCENERY_PACK Custom Scenery/Aerosoft - LFMN Nice Cote d Azur X/ SCENERY_PACK Custom Scenery/Aerosoft - LFPG Paris CDG/ SCENERY_PACK Custom Scenery/Aerosoft - LFPO Paris Orly/ SCENERY_PACK Custom Scenery/Aerosoft - LPFR Faro/ SCENERY_PACK Custom Scenery/Aerosoft - LSGG Genf/ SCENERY_PACK Custom Scenery/Global Airports/ SCENERY_PACK Custom Scenery/x_Prefab_Airports_1xp/ SCENERY_PACK Custom Scenery/x_Prefab_Airports_2xp/ SCENERY_PACK Custom Scenery/x_Prefab_Library/ SCENERY_PACK Custom Scenery/LOWI Demo Area/ SCENERY_PACK Custom Scenery/KSEA Demo Area/ SCENERY_PACK Custom Scenery/KSEA Demo Terrain/ SCENERY_PACK Custom Scenery/ff_library/ SCENERY_PACK Custom Scenery/ff_library_extended_LOD/ SCENERY_PACK Custom Scenery/osm2xp/ SCENERY_PACK Custom Scenery/ruscenery/ SCENERY_PACK Custom Scenery/OpenSceneryX/ SCENERY_PACK Custom Scenery/zzz_hd_global_scenery3/
就可以了。
-
X-Plane 10.40 beta1 初步印象
一回家就把X-Plane升级到了10.40 beta1,在<a href=松本机场附近飞了一圈, 感觉确实如<a href=以前的介绍一样,远处视野改善不少, 但是显示速度也慢了不少,帧频从25-30降到了10-15左右。 下面就结合拷屏看一看几个更新点。
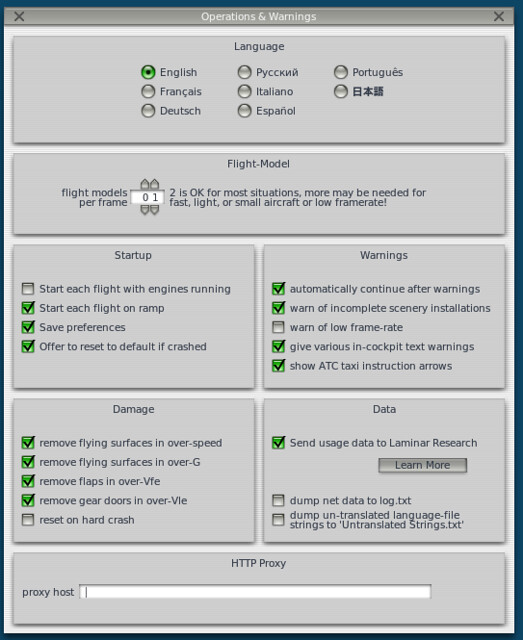 上面的操作和警告设定中,多了不少选择,
比如Startup里面的Offer to reset to default if crashed可以选择崩溃后的显示模式,
Warnings里面的show ATC taxi instruction arrows用于关闭地面滑行时的箭头显示等。
上面的操作和警告设定中,多了不少选择,
比如Startup里面的Offer to reset to default if crashed可以选择崩溃后的显示模式,
Warnings里面的show ATC taxi instruction arrows用于关闭地面滑行时的箭头显示等。
 附近的ATC频率一览,这个功能真的很方便
附近的ATC频率一览,这个功能真的很方便
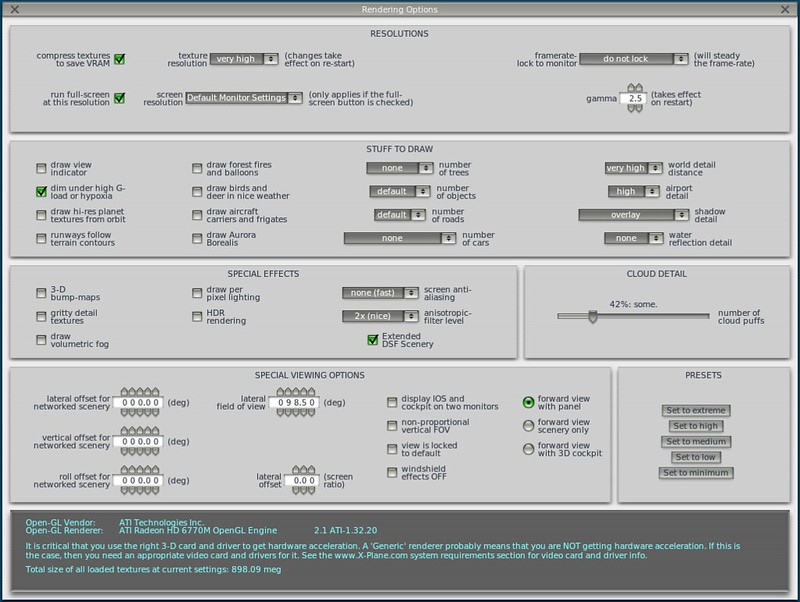 渲染设置中右下角就是制定好的5级显示速度按钮,
最上面的按钮可以保证运行速度,但是画质会被牺牲,
最下面的运行速度最慢,但是画质最好。
渲染设置中右下角就是制定好的5级显示速度按钮,
最上面的按钮可以保证运行速度,但是画质会被牺牲,
最下面的运行速度最慢,但是画质最好。
另外最重要的就是设定画面中的Extended DSF Scenery选项, 把它选中以后,再看远处,确实效果好了很多,画面真的非常漂亮

 当然运行速度变慢了很多,帧频10到15左右吧,操纵起来还是很不灵活的。
当然运行速度变慢了很多,帧频10到15左右吧,操纵起来还是很不灵活的。于是到天气的设定页里,把能见度调整一下,比如现在是75海里,
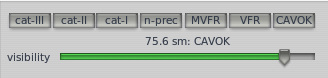 后来把它调整到30-50左右的话,帧频就能维持在20以上,这样一般的飞行还是没有什么问题的。
后来把它调整到30-50左右的话,帧频就能维持在20以上,这样一般的飞行还是没有什么问题的。接下来又用Cirrus the Jet在新西兰皇后镇附近试飞,飞行高度20000英尺, 景色描绘的非常细腻,远方的山峦和湖畔看的非常清楚,而且飞行中也没有发生停顿, 我对10.40的效果DSF改进很是满意。

用了一会儿10.40以后,感到这个版本在我的iMac上还是比较安定的, 到目前为止除了启动时加载地景文件时间比较长以外(2-3分钟),没有crash,一切都很正常, 看起来稳定性也是不错的。
完
2015/06/13 早上又测试一下,发现beta1启动不起来,于是升级看看,果然beta2出来了。 update以后就一切正常。
-
10.40 beta1发布!
<a href=http://www.x-plane.com/?article=x-plane-10-40-release-notes>X-Plane 10.40 beta1终于出来了,让我们看看这个版本里都有什么新功能:
增加了576个新机场地景,中国的有北京国际,深圳宝安,香港新机场, 日本的有成田,札幌新千岁,这样系统共有1730个3D机场了
增加了重新生成天气的快捷键,“sim/operation/regen_weather”
可以从网络获得高层风信息了
从METAR里模拟风切变
新的分布式地景加载方式,使用多核CPU减少加载时间!!
远程视野的新选项!!
动画格式从Quicktime改变为AVI格式
新增的渲染选项,可以从预设的几个级别简单地制定显示速度,从注重显示速度到注重画质,一共5档!
夜间灯光大小随屏幕大小成比例的变化
地面滑行时的箭头显示可以在Operations and Warnings中设定开关
飞行中能够把OS的屏保关掉了 !!!
以往X-Plane崩溃后显示总是会被初始化到窗口模式,新版本在Settings/Operations and Warnings中增加了新选项可以直接回到崩溃之前的模式!
驾驶舱内襟翼位置显示和机翼上实际位置同步,而以往是不同步的!
在点火之后的电压显示改为正确的方式
增加了每架飞机的飞行里程表!
2D驾驶舱模式下的风档特殊效果可以被取消了,包括撞鸟,下雨等
备用的手动油门不会优先于调节器了
油温计和油量方面的故障可以支持了
更好的压气机失速效果
快速启动发动机命令,这样就不用每次费时间的手动启动了!
新增special/Toggle Nearby Air Traffic Controllers菜单,能够弹出附近的ATC频率一览,点击其频率就可以自动设置到COM1里面!!
自动收集系统性能信息的选项在Operations & Warnings 里,这样X-Plane的开发者就可以知道用户的各种性能问题了
完
-
松本机场地景RJAF Matsumoto Airport
长野是日本内部的一个地区,以举办1998年冬季奥运会而变得有名。 这里有海拔3000多米的雪山,景色宜人,是登山和滑雪爱好者的天堂。 我一般每年都会去长野一次,但是主要目的是泡温泉。
松本机场地景出来了,自然不能错过。 从x-plane.org下载安装包,解压以后把RJAF Matsumoto jp目录移动至Custom Scenery, 然后在scenery_packs.ini中加入 SCENERY_PACK Custom Scenery/RJAF Matsumoto jp/ 即可。
对了,这个插件需要OpenScenery X,不过作为本博客的读者,相信你的电脑里肯定有了。
放两张拷屏,个人觉得这个插件做的不错,细节很精致,推荐一下。


另外松本机场的航图可以在本站这里查询。 提醒一下这个机场附近高山林立,并且没有ILS精密引导,所以一定要注意安全啊,起飞降落对于新手来说可能会是一个挑战。
完
附注 近日小旅游,写了点游记也来和大家分享一下。 镰仓与夏日风物紫阳花 青森县弘前公园赏樱
 完
完