飞行模拟知识库
-
X-Plane ATC System Manual-1
官方推出了正式的X-Plane 12 ATC System Manual, 那么这里就学习一下,并顺便翻译成中文版吧。(其实是ChatGPT的意译)
概述
ATC(空中交通管制)系统旨在通过协调飞行器的移动并传递必要信息,确保您和其他空中用户的安全。无论您是使用飞行计划并按照预定航线飞行,还是随机飞行,都可以使用ATC服务。ATC是几乎所有现实飞行场景中不可或缺的组成部分。请记住,想要真实驾驶飞机,您需要拥有飞行无线电执照和飞行员执照。请勿尝试同时使用X-Plane的原生ATC和其他任何ATC或类似系统。这些系统互相之间不会了解彼此的操作。
通常,在任何时间点,您的飞机仅由一个管制员负责。一旦您开始与ATC交互,您的飞机就会与相应的管制员建立关联。一旦关联建立,除非明确指示,否则切勿随意更换频率离开当前管制员。在本指南中,这种关联被描述为"所有权"—-在任何时候,您的飞机最多只会被一个管制员"拥有"。按照惯例,该管制员的其中一个频率应设置为COM1的主频率。
您可以提出的请求或响应取决于您当前的情况,包括之前的请求、飞机的预期任务以及您当前与之交谈的管制员类型。模拟中包括几种不同类型的管制员,但并非所有机场都会提供这些服务。
管制员类型
- 放行许可(Clearance Delivery):如果机场有放行许可管制员,您应该与其联系以提交飞行计划。这是"所有权"规则的一个例外;放行许可管制员不会"拥有"您的飞机,因为他们只执行一个功能。
- 地面管制(Ground Control):此类型的管制员负责提供地面操作的许可和指令,例如请求和发放滑行指令。在滑行到滑行路线上的第一条使用中的跑道之前,即使这条跑道不是您的起飞跑道,您的飞机都会由地面管制员"拥有"。到达后,从最后一条使用中的跑道滑行到指定停机位期间,地面管制员也会"拥有"您的飞机。
- 塔台(Tower):塔台管制员负责任何在使用中的跑道附近或上空的飞机,无论是在地面还是空中。塔台将为您提供最终的起飞指令、起飞或着陆许可,以及其他近机场的功能。
- 进近/离场管制(Tracon or Approach):这些通常是较小的区域性管制员,负责协调穿越其空域的航班,通常为位于其空域下方的机场引导进场和离场的飞机。
- 区域管制(Center):这是模拟中最大的管制类型,通常负责巡航阶段的飞机或任何未处于其他管制员空域的飞机。
- 管制区域(Controller sectors):单一管制设施负责的小型空域(即管制扇区)尚未被模拟。
通常情况下,负责"拥有"您飞机的管制员会根据需要发出指令并响应您的请求。一般而言,当管制员发布直接指令(如"右转航向120")时,您需要立即遵从,并复述指令。复述是为了确保您正确接收到指令;在模拟器中,您不需要自己构建回复内容,因此复述总是正确的。不过,您仍然需要发送复述信息。
需要注意的是,管制员完全忽略您的FMS(飞行管理系统,亦称FMC)。将航路编程到FMS中并不意味着ATC会批准这条航路;您需要提交飞行计划告诉ATC您将遵循的航路,并按照计划执行。
管制员的指令必须迅速执行,除非这些指令会危及飞机安全。通用规则是:“飞行优先(Aviate);导航其次(Navigate);沟通最后(Communicate)。”
大多数情况下,管制员会向您提供"应答机编码"(Squawk Code)。您需要快速在飞机的应答机上设置该编码;如果编码错误,您会收到提醒,直到设置正确。管制员还会在不同阶段提供大气压力设置,您需要将这些设置到高度表上。
同时讲话是极其不礼貌的行为,即使您认为对方已经结束,也应等待电台清空后再发言。每次传输结束时都会有短暂的电台噪音(不到半秒)和"咔嗒"声作为标志。这段时间可以用来准备您的发言,特别是当发言内容较长时。确保不要选择最后的发送选项,直到电台清空。当同一频率上有许多AI飞机时,可能难以找到空闲时间进行通信;现实中也是如此。模拟器会尽量将AI飞机的请求与回复成对处理,并会比人类飞行员更长时间地等待新请求的发送。
随着时间推移,您会了解哪些通信会收到回复,以及哪些不会。即使电台短暂繁忙,不久后也会平静下来,您将有机会发言。为了保险起见,建议在尝试发言前等待至少一秒的间隔,确保没有其他回复,并且管制员已经完成了与其他飞机的对话。
机场类型
在ATC系统中,机场被分为三种类型: 1. 受控机场(Controlled) 这是大型机场的典型类型,通常配备专业人员的塔台,并与集中式信息系统相连接。模拟器将这种机场称为"受控"机场,具备完整的ATC服务功能。 2. 无塔机场(Untowered) 这是规模最小的机场类型,没有任何无线电设施。虽然目前不支持UNICOM,但在这些机场可以通过提交飞行计划并联系区域管制员来进行最基本的ATC操作。 3. FISO机场 这种类型的机场在美国以外的地区较为常见,设有公布的频率,由经过训练的人员值守,但不属于集中式系统的一部分。FISO机场提供广泛的类似ATC的服务,但仅限于向飞行器提供信息和建议,而非直接指令。不过,您仍需遵守他们的建议! 在模拟器中,FISO机场的主要区别在于可用的请求类型不同,许多内容会以不同的方式表述。此外,频率的切换需由您主动发起—-您需要告知FISO您将切换频率,而非请求其许可。由于FISO机场没有雷达,工作人员不会告知您已到达其空域或通信范围的边缘。
机场类型由WED(WorldEditor)中机场设计者设置的数据决定。如果没有设置,模拟器会通过启发式方法进行判断。在X-Plane中,机场的类型可能与现实中的类型有所不同。您可以在地图中的"机场弹出窗口"中检查机场的类型。

-
在大屏幕上玩玩飞行模拟
最近日本小米在减价促销,于是用29800日元买了一台42寸的显示器放在卧室。 平时主要是看看YouTube或者Amazon Prime等视频, 然后想起玩飞行模拟在大屏幕是不是效果好一些, 于是连上HDMI测试一下。
x-plane12的图像设置中,把显示器1(即小米显示屏)设为全屏化模拟器, 把主显示器(即MacBookPro的显示器)设为教员操纵台,
 插上Yawman Arrow Handheld Controller,
启动塞斯纳-172马上飞起来。
插上Yawman Arrow Handheld Controller,
启动塞斯纳-172马上飞起来。
拿手机拍了几个短短的视频,大家可以看看效果如何。





短暂飞行3-40分钟,完成起飞降落,对大屏幕上的飞行模拟我的感觉还是不错的。 主要的好处是可以离开屏幕2-3米外,舒服坐在沙发上, 然后尽情欣赏塞斯纳172的机外风景。 缺点是看不太清玻璃仪表盘,毕竟诸多数字的字体都太小, 也许还是选择更加老式的模拟仪表盘更适合大屏幕吧。
-
从羽田到伊丹机场
周末把miniCOCKPIT miniFCU和Yawman Arrow Handheld Controller连上计算机,
 在成田羽田附近自由飞了一会儿以后,打算飞个羽田到伊丹的航线吧。
在成田羽田附近自由飞了一会儿以后,打算飞个羽田到伊丹的航线吧。于是打开simbrief.com,查了下航路如下: LAXAS3 LAXAS Y56 TOHME Y54 KOHWA Y546 AGPUK MIRAI ABENO IKOMA
马上输入到FMS,从羽田05跑道起飞。



疫情以后就没去过大阪,快降落时对市中心的风景还挺怀念的。

降落时也是完全自动驾驶,XP12缺省的A330机模的操作挺省事的嘛。


-
测试X-Plane 12.1.0
周末把X-Plane升级到12.1.0-beta-2,在Yosemite附近飞行了一会儿,发现基本运行稳定,没有什么bug出现,还算满意。
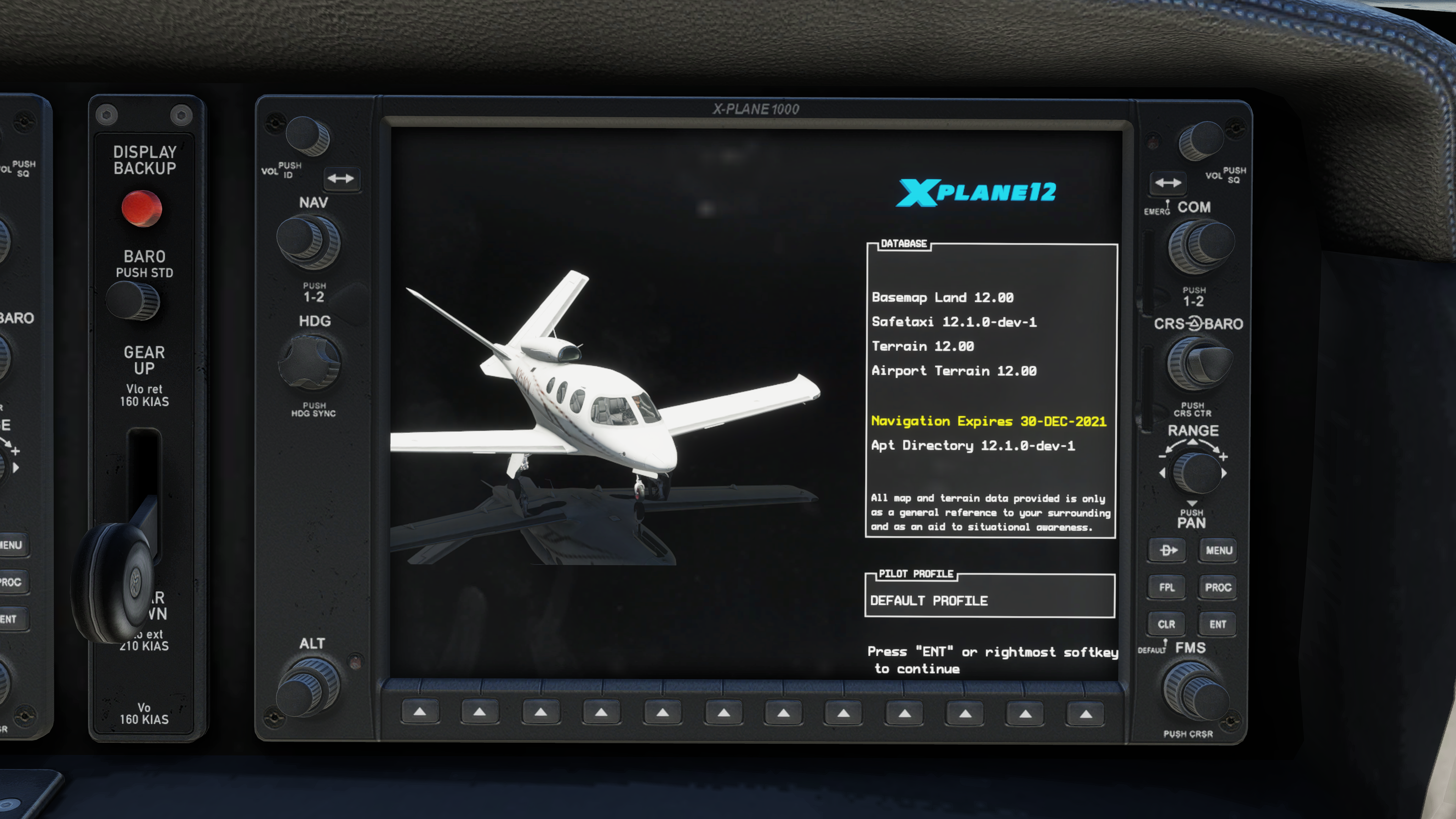
启动画面变成了荷兰航空的波音737,启动时间好像长了一些。

看一下版本信息

打开设定画面,感觉变化不太多,把RCAS设置加上看看效果如何。另外把新HUD也选上了。

新HUD确实比以往的数据多了很多,实用性增强了,今后使用HUD的机会应该会多起来。


新版本对云彩的渲染改善下了很多功能,从使用者的角度来看略微真实度好了一些。 另外光线也不像以前那样炫目,看机身的感觉也更接近真实的印象。

RCAS确实有些锐化效果,地景不再是模模糊糊的,清晰度增强,做观光飞行看风景更舒服了。

一开始安装12.1.0还有些抵触心理,怕bug太多不稳定什么的。 不过飞行了一会儿发现没有这个担心, 虽然是beta版, 我的体验还是很满意的。
-
X-Plane 12.1.0 (Beta 1) Release Notes
X-Plane 12.1.0 Beta 1终于发行,看这长长的Release Notes,功能改善还真很多。 下面就摘录一些自己比较关心的内容翻译一下。
常规更新
- 云层现在在体素层面进行混合,而不再是METAR层面,修复了金字塔、立方体和其他明显形状的问题。
- METAR站点附近的天气使用软化的Voronoi图进行混合,而不是杠杆法,从而在机场实现更接近真实的METAR条件。
- 重构内部代码,以理顺包络、力矩和模拟之间的交互。
- 下载器已重写,将更快地下载当前天气。
- 启用了新的天气服务器,使METAR数据更具弹性,并能够通过重放支持标记的旧天气来进行调试。
世界空间云影
- 此更改将云影从STR空间移动到类似于常规阴影的世界空间。这将云影与天气域解耦。云影和世界之间的注册已得到改善。
湍流
- 改进了湍流系统,提供更平滑的体验,特别是在积云周围。
结冰
- 更新了多个飞机的结冰效果(A330、B737、C90和Citation X)。
- 基于表面法线和风向的结冰。即使在没有热源的情况下,也增加了定向结冰。
- 现在有冻雨和冰,有些随机的热逆温也会导致结冰。
- 增加了对重叠热源的支持。
控制器支持
- 完整的控制器协议支持
- 天气系统支持通过控制器绘制雷暴单元
Bug修复
- IMC预设有层云,以减少IMC训练中的湍流
- 云底更快变厚,以便更好地过渡到IMC
- 修复了低天花板天气条件下云底过高的bug
- 多项METAR解析修复
- 天气图更准确地显示栅格GRIB数据
- 双栈机器上的TCP连接支持IPv4(需要用于控制器支持)
- 修复了云底错误
- 修复了云底,使其更紧密并修复了缺失的底部体素。这在一定程度上改善了云底状况
图形
核心引擎
- 当选择MSAA时,FXAA始终启用
- 当MSAA开启时,在Alpha测试表面上使用Coverage to Alpha,以获得更高的质量
- MSAA解决方案现在是场景参考,以提供更好的视觉效果
- 景深
- 设置菜单中暴露RCAS选项
- 当由于VRAM压力导致纹理降级时,设置菜单中会有通知
- VRAM改进,因为更多数据在图表中,图表可以更好地分配内存
- 平滑阴影
- 水面云影
- 大幅改进渲染图表重烘焙时间
- 改进了云影质量和大气散射质量
闪电
- 增加闪电的轻微颜色
- 使远处的闪电略微变淡
- 使近处的闪电稍微变粗
- 使闪电的起始部分逐渐消失
- 闪电溢出的光照范围过大
- 改善声音距离响应
新的粒子效果
- 粒子效果系统支持在接触地面时出现的粒子
- 粒子效果编辑器现在支持复制/粘贴功能
- 新的数据引用以支持粒子效果
- 新的内置效果包括JATO(喷气助推起飞)、灭火、水轰炸、地面擦伤和旋翼冲洗
- ACF中的覆盖选项,如果需要,可以选择不使用新的效果
水体
- 修复了水体浑浊度模型:水体不再总是完全透明。
- 默认水体的颜色和清晰度根据位置而变化(例如,SABE附近的水体是不透明和浑浊的,而MBPV附近的水体则接近清澈的绿松石色)。
- 云影在水面上更明显。
- 修复了使用水体的正射照片景观包的bug。
自动生成
- 改进了欧洲高密度城市住宅的建筑
- 改善了机场停放飞机的生成系统。系统将根据停车位的大小始终选择最大的可能飞机。
系统和航空电子设备
-
Yawman Arrow Handheld Controller
近日购入新飞行模拟外设–Yawman Arrow Handheld Controller, 使用感觉还不错,这里简单介绍一下。


首先把Yawman Arrow Handheld Controller产品网站中的说明用ChatGPT-4o翻译一下:
全功能手持驾驶舱 Yawman Arrow是传统手持游戏控制器与各种飞机上独特飞行控制系统的融合。 为了实现精准和多功能性,Arrow将传统操纵杆、桌面油门控制和方向舵踏板等飞行控制整合到一个手持设备中。
由飞行模拟爱好者为飞行模拟爱好者设计,Arrow可以成为您在笔记本电脑、Android平板电脑或桌面模拟器上的主要控制器。 Arrow内置了您所需的一切,以适应最先进的模拟器,并且设计紧凑,让您可以随时随地飞行。
Arrow的尺寸非常适合在桌面放松使用或在沙发上休闲飞行,并且易于放入随身行李中,便于在笔记本电脑或Android平板电脑上飞行。 对于不想进行大规模硬件投资的飞行模拟爱好者来说,这款超多功能的Arrow也是理想选择。
机械联动触发器 Arrow内部的专利技术解锁了直观的方向舵控制,通过机械联动触发器让在最恶劣的侧风条件下飞行也变得轻松。 它还允许在滑行起飞时进行机动,并在直升机飞行中提供无与伦比的控制。
精准控制 集成的微调轮最大程度地增强了飞行的真实感,此外还有两个肩部缓冲按钮、一个五按钮方向键以及一个五向帽开关,用于独立的无人机视角控制。 设备中还包含一个多功能的"六联"可编程按钮,允许无限组合来控制自动驾驶和其他系统。
7个轴,21个按钮 Arrow提供了俯仰、横滚和偏航的精准控制,总共包含七个完全可编程的滑块,其中包括两个维尼尔式引擎控制,类似于某些小型活塞动力飞机上的控制。 这些控制也非常适用于大型喷气式飞机的扰流板和反推装置。
兼容性 虽然Arrow具有无限配置的多按键功能,但我们已经为不同类型的飞机开发了推荐的配置文件,帮助您快速起飞并充分利用Yawman Arrow的功能。Arrow的每个功能都旨在与最现代化的PC飞行模拟平台无缝协作。 Arrow完全兼容PC上的微软飞行模拟器、Android上的Infinite Flight、PC和macOS上的Laminar Research X-Plane、Lockheed Martin Prepar3D、DCS World等,以及支持操纵杆控制的非模拟游戏。
美国制造 Yawman自豪地在美国设计、制造和包装。
Yawman的Arrow控制器为便携和桌面飞行模拟带来了精准和多功能性。 Arrow的专利设计将复杂的驾驶盘、油门控制和机械连接的方向舵踏板结合在一个手持设备中, 适用于您的笔记本电脑、台式机和Android平板电脑。
Arrow具有极大的多功能性,可以根据您在飞行模拟器中的个人偏好进行编程。 Arrow的简便性让您在桌面保持整洁的情况下也能抓住几分钟的飞行时间。 您可以随身携带它,让您在咖啡店、飞机上、火车上或酒店房间里也能享受虚拟飞行的乐趣。 在虚拟现实飞行中,Arrow保持您沉浸在飞行体验中,并让您全面掌控飞机和模拟器的功能。
平板兼容性:Arrow支持在运行Android的平板和手机上使用Infinite Flight。 控制器盒内包含一根USB-C到USB-A连接线,用户可能需要适配器来连接平板或手机,具体取决于设备的连接端口。 Arrow不兼容iOS设备,如iPad和iPhone。
请参考常见问题解答(FAQ)以获取常见问题的答案。如有商务咨询或进一步信息,请联系[email protected]。
特点:
- 集成微调轮
- 五按钮方向键
- 五向帽开关
- 两个肩部缓冲按钮
- 两个维尼尔式引擎控制滑块
- 两个面板滑块
- 模拟踏板的机械联动触发器
- 美国制造
兼容性:
- 适用于PC的微软飞行模拟器
- 适用于PC和Mac的X-Plane 11/12
- 适用于Android的Infinite Flight
- Prepar3D
- DCS World
把Yawman Arrow连上MacBook Pro,启动X-Plane12,
 然后设置一下各个按钮。
然后设置一下各个按钮。 -
洛杉矶拍机一日行-飞行博物馆,圣莫尼卡机场,洛杉矶国际机场,瓦恩奈斯机场
疫情以后基本没有怎么出门拍飞机了,这次黄金周来美国走走,请哥们儿带路一天里逛了三个机场。
首先来到位于加利福尼亚州圣莫尼卡的私立非营利航空航天博物馆–Museum of Flying飞行博物馆。 它成立于1974年,于2002年关闭,并于2012年在新设施中重新开放。 博物馆展示了航空史,重点介绍了南加利福尼亚州的唐纳德·道格拉斯和道格拉斯飞机公司。





圣莫尼卡机场(IATA:SMO,ICAO:KSMO,FAA LID:SMO)位于美国加利福尼亚州圣莫尼卡市,主要用于通用航空,位于洛杉矶大都市区。 它是美国历史最悠久的机场之一,曾是世界上最繁忙的单跑道机场之一,也是世界领先的通用航空机场之一。 该机场距离太平洋(圣莫尼卡湾)约2英里(3公里),距离洛杉矶国际机场北部约6英里(10公里)。 美国联邦航空局2009年至2013年的国家综合机场系统计划将其分类为减压机场。 该机场计划于2028年年底关闭。 圣莫尼卡机场占地215英亩(87公顷)。
2016年曾来过圣莫尼卡机场一次,故地重游发现由于即将关闭的原因,这里的飞机已经所剩无几,整个机场冷冷清清。




接下来移动到洛杉矶国际机场南侧的Imperial Hill, 这个小公园俯瞰着整个机场,可以看到飞机起飞和降落,特别是24号跑道和25号跑道。 这里有长凳和开放的视野,非常适合长时间的拍摄和观赏。





然后再转移到24R跑道附近的In-N-Out汉堡店。 20多年前去加州硅谷出差时就喜欢上这家连锁店, 但本次的主要目的不是汉堡而是飞机。





最后一站是瓦恩奈斯机场。 瓦恩奈斯机场(IATA:VNY,ICAO:KVNY,FAA LID:VNY)是位于洛杉矶市瓦恩奈斯社区的一座公共机场。 该机场由洛杉矶市政府的一个分支机构洛杉矶世界机场管理(LAWA)运营,该机构还运营洛杉矶国际机场(LAX)。 瓦恩奈斯是世界上最繁忙的通用航空机场之一,该机场的两条平行跑道平均每年有超过230,000次起降。 然而,截至2022年,瓦恩奈斯没有商业航班。
瓦恩奈斯机场是新闻、医疗救援和旅游直升机运营商的所在地,也是洛杉矶市消防局航空作业单位以及洛杉矶警察局和洛杉矶水电局直升机的维护基地。 最初于1928年12月17日开放,该机场在二战期间成为瓦恩奈斯陆军航空基地,战后更名为圣费尔南多谷机场,后于1957年改为现名。





本次在三个机场的照片制作为3个4K视频分享到Youtube上,欢迎观赏。
-
XP12的A330起飞设置
为了使用miniFCU外设这几天在复习X-Plane12中的A330, 把起飞设置的几个问题写个小笔记。
先看upper ECAM信息栏如下:

于是把Auto Brk设定到Max;

设置扰流板预位GND SPLRS ARM时要把手柄往上拉起来;

Flaps Config T.O. 的设置在FMC的Prop里面(R3位置),按设置放下襟翼;

接下来就是按T.O. Config来test.

测试时如果出现"config pitch trim not in t.o. range"错误的话, 需要手动把trim 设定到up位;

这样的话ECAM信息栏的文字颜色都变成绿色了。

-
miniCOCKPIT的miniFCU外设
几个月前在miniCOCKPIT订购的miniFCU(Flight Control Unit)终于送到,马上安装到X-Plane12上试了试手。


一开始在官网上把设备号登记,这样就可以享受一年的保修服务了。
首先安装插件,根据这里的介绍, 下载X-Plane12用的DLS miniCOCKPIT_mac_1.0.0.zip, 然后把插件拷贝到X-Plane的plugin目录下即可。 由于MacOS上插件Mac.xpl 不启动的问题,同样需要在系统设定的安全性设置里把Mac.xpl许可。
使用XP之前先测试一下设备的演示模式: 按住SPD MACH键不放,然后插上USB线给miniFCU供电,几秒之后就会进入demo模式。
 把每个按钮和旋钮都试了一下,尤其是旋钮按下拉起的触感很舒服,甚是满意。
把每个按钮和旋钮都试了一下,尤其是旋钮按下拉起的触感很舒服,甚是满意。然后启动X-Plane12,看插件菜单,
 能找到miniCOCKPIT,并且显示"Hardware connected",
看起来设备连接问题不大。
点击"About miniCOCKPIT",可以看到插件版本显示1.0,
能找到miniCOCKPIT,并且显示"Hardware connected",
看起来设备连接问题不大。
点击"About miniCOCKPIT",可以看到插件版本显示1.0,
 miniFCU外设的firmware版本为20231102,一切正常。
miniFCU外设的firmware版本为20231102,一切正常。miniFCU支持的机型如下: Toliss A319/320/321/340 series, FlightFactor A320, Default A330 (X-Plane 12), and Jardesign A320.
接下来选择XP12中的Airbus 330, 可以看到miniFCU和模拟机的FCU的数据自动同步,
 那么就简单飞行一下吧。
那么就简单飞行一下吧。

从跑道起飞后打开自动驾驶和自动油门,接下来飞行了大约30分钟吧, 速度高度航向,上升下降平飞,基本功能上来说没什么特别的地方,使用感觉很是舒服。
另外关于minFCU的EXPED按钮, 在官网上有EXPEDite功能的介绍,可以参考一下。
EXPED 按鈕是空中巴士公司提供的可選功能,飛行員只需按一下按鈕即可暫時增加爬升或下降梯度。在爬升期間啟用 EXPEDite 模式時,飛機將以綠點速度(較慢的速度,具有最佳升阻比)翱翔天空。的是,綠點速度隨著飛機高度的增加而增加,不建議使用EXPED 爬升至25000 英尺以上(以避免太接近失速速度)。
感觉FS和LS按钮并不常用,所以自己还是使用其缺省设定,也就是通常的ALT按钮功能。在下降過程中,按下 EXPED 按鈕即可釋放腎上腺素激增的高速下降。飛機將其速度目標更改為 0.80 馬赫或 340kt(以較高者為準),使其能夠以極快的速度失去高度,同時將動能(獲得速度)交換為位能(失去高度)。這就像乘坐驚險刺激的過山車穿越天空!因此,如果您想體驗快速下降或高空攀登的快感,EXPED 按鈕是您武器庫中的完美工具。
但實際上,這個功能很少被使用(飛行員只是使用速度旋鈕來達到相同的目的),因此在 miniFCU 中,我們設計使其能夠與其他更常見的功能(如 FS 和 LS)互換。
-
看一下卫星通信中的ACARS
十年前的老文章 漫谈个人接受ACARS信号的方法 里介绍过接收VHF的ACARS信号, 卫星通信(SATCOM)中的ACARS又是什么样,稍微查了一下资料。
首先看马来西亚航空MH377失联事件的Wikipedia页面, 与卫星通信的信息如下:
飞行时间01:30 Inmarsat-3 F1卫星接收到七个握手信号中的第一个 飞行时间07:30 Inmarsat-3 F1卫星捕捉到飞机ACARS发出的最后一次完整握手信号,代表此时还在飞行 飞行时间07:38 计划外,透过飞机发出的无法解释的"部分握手"信号,在作业程序中须预留的抵达后余存燃油应所剩无几 飞行时间08:34 Inmarsat预定下次握手时间未收到飞机答复
Inmarsat即国际海事卫星组织, 同样可以通过Wikipedia看到Inmarsat提供的卫星服务:
 Inmarsat-3 F1卫星的涵盖范围为印度洋地区, 发射日期为1996年4月3日,已经在太空中运行了28年。
Inmarsat-3 F1卫星的涵盖范围为印度洋地区, 发射日期为1996年4月3日,已经在太空中运行了28年。网上找到不错的资料,那么下面把各种ACARS的各种通讯方式总结一下, 通信媒体, 调制方式, 传输速度, 传输数据单位, 纠错功能有无,访问方式以及协议做成表格供参考。
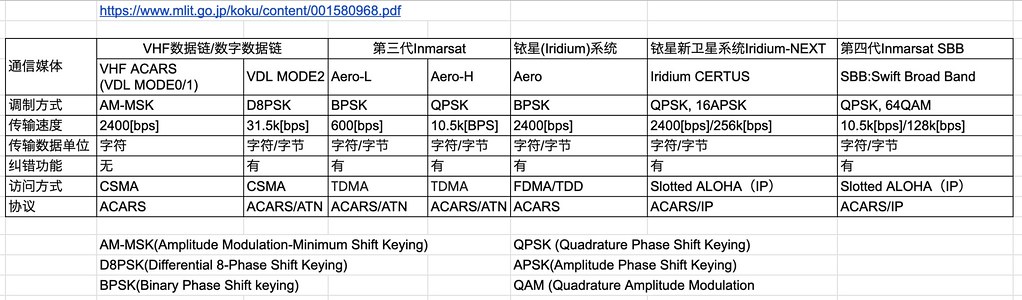 另外估计基于 IP 的飞机通信寻址与报告系统(ACARS OVER IP)今后将会是主流了吧。
另外估计基于 IP 的飞机通信寻址与报告系统(ACARS OVER IP)今后将会是主流了吧。另外根据satbeams.com上的资料可以知道十年前检测到马航失联客机信号的第三代Inmarsat卫星Inmarsat-3 F1已经退役,
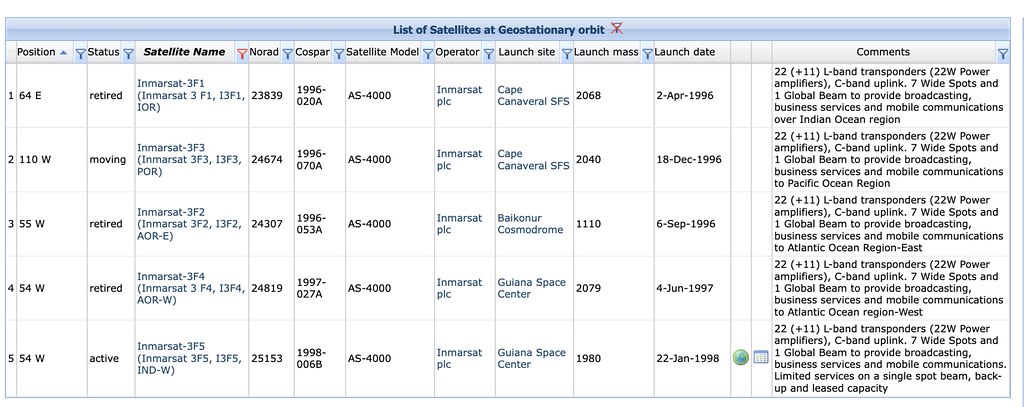 Inmarsat-3F5, Inmarsat-4F1, Inmarsat-4F2, Inmarsat-4F3等正在提供工作。
Inmarsat-3F5, Inmarsat-4F1, Inmarsat-4F2, Inmarsat-4F3等正在提供工作。

作为业余爱好者如何接受卫星信号呢? 现在手头没有卫星天线,也没有L波段的接收机,所以就不实践了,只查一下资料而已吧。
关于频率,看UFH-Satcom网站上的资料, 这里能找到不少的信息, 比如覆盖印度洋的Inmarsat-3 F1如下:
 现在覆盖亚太地区的Inmarsat-4 F1如下:
现在覆盖亚太地区的Inmarsat-4 F1如下:

Inmarsat-4 F1的运行轨迹可以在N2YO上找到。

网上有不少爱好者接受卫星信号的介绍,下面给出几个链接。 今后有时间和精力的话,自己也许会弄一下吧。
- 1550MHz Active Inmarsat Antenna Bundle - Includes SAWbird+ iO LNA & Filter Module, High Gain (3.5dBi) 1550MHz Patch Antenna, SMA DC Block, Cables & Adapters
- Basic's to decoding Inmarsat L-Band signals using the RSP SDR
- Exploring L Band with SDRuno
- JAERO A program to demodulate and decode Classic Aero SatCom ACARS signals
- Inmarsat Aero
- How To Decode L band Satellite ACARS and CPDLC messages with JAERO and your SDR
- 收集ACARS数据的爱好者团体Airframes
- FEEDING ACARS DATA TO AIRFRAMES.IO
- satnogs的Inmarsat-4 F1 Observation
其他链接
-
12.1.0的详细说明
正如大家所知,X-Plane团队正在以前所未有的速度增长。 其中一个结果是更新内容更多、涵盖X-Plane体验更多方面的大型更新,而12.1.0也不例外!
最初是一个以图形为重点的版本,我们的团队还实现了新的飞机系统、飞行模型改进、天气、ATC系统改进、对X-Plane专业版的增强,以及一种基于物理的摄像机,让你感觉就像真的随着飞机一起移动。 这个版本目前正在内部测试中,我们期待着尽快将其作为公共测试版发布。

以下是你可以期待的内容:
图形 - 我们在12.1.0版本中的重点
- 云影在水面上的投射
- 泛光照明效果 泛光是一种图形效果,超亮光源可以"渗透"到图像周围的部分,通常在太阳周围或飞机灯光周围可以在所有环境亮度下观察到。
- RCAS(鲁棒对比适应性锐化)
- 更柔和、无锯齿的地面阴影
- 多重采样抗锯齿(MSAA)改进 MSAA分辨率现在是光度学上正确的 MSAA的alpha剪裁纹理 MSAA + FXAA组合 这是我们改进X-Plane 12抗锯齿选项的首个步骤
- 改进的CPU性能,得益于我们的新"现代收集器" 这段代码用于决定模拟器在任何给定时刻需要绘制的场景 许多X-Plane用户目前受到CPU限制,因此这应该会使该人群的性能略有提高
- 更好的水透明度和浑浊度 在许多情况下不再看到船舰底部
- 新的截图工具,实时控制景深和曝光






新的粒子效果
- 撞击路面产生的火花
- 飞机轮胎和发动机喷射的地面水花
- 飞行直升机/起飞飞行器时的棕色/白色尾流





飞机系统
- 对我们的G1000的新增内容 – ADS-B 模拟 – 风暴雷达页面 – 交通地图页面 – 机场METAR标志 – NDB + VOR 页面 – WAAS/测试卫星星座 – 启动时的覆盖层 – (SVS正在进行中,并应在不久的将来发布,只是不包括在12.1.0中)
- G1000插件互操作性 – 我们的G1000现在将更容易被第三方修改以满足其特定飞机的需求
- 通过插件实现玻璃仪表 – 这段API代码将使第三方开发人员更容易将自定义玻璃仪表集成到其飞机中
- STEC ST-360 自动驾驶仪




飞行模型
-
关于接下来的12.1.0和12.2.0版本
官网上披露了12.1.0和12.2.0版本的开发计划,下面就翻译一下。 Blog Post Walk of Shame
两个快速商店说明:
我们在蒙特利尔宣布了X-Plane商店计划;Dellanie在那里有一个很棒的常见问题解答,但是对于开发者,我想要强调两点:
-
我们不会封锁X-Plane。我完全理解为什么人们可能会认为我们会这样做,因为iPhone应用商店是(1)进行应用内购买的一个非常显眼的方式,而且(2)iPhone是封闭的。但我们不会这样做。您将所有东西导入X-Plane的方式仍然有效,包括附加组件安装程序、拖动文件夹等。通过商店进行购买不是必须的,所有现有的工作方式将继续有效。您不必为免费软件付费或重新购买任何东西。
-
您不必一直在线。我们目前的政策是,如果您有在线许可证(“XDD密钥”),您必须每两周或更长时间登录一次以更新它。我们不会转换为"一直在线"的模式 - 我们知道这对我们许多用户来说是不可能的,并且我们认为保持这种"时不时更新密钥"的政策是必要的。
接下来的计划:12.1.0 和 12.2.0
我们目前有两个"重大更新"的计划:
12.1.0 将是下一个版本,主要是一个图形更新。RCAS、泛光、景深、阴影柔化、云影修复、新贴花,你懂的。这个更新还将解决一些真实天气的bug,并转移到新的真实天气服务器。
12.2.0 将在 12.1.0 之后发布,主要是一个飞行模型更新。包括奥斯汀在螺旋桨叶片动态、失速和湍流等方面的所有进展。
这两个版本都将有很多其他内容;它们都是大型补丁。我指出图形/飞行模型的区别是有意为之的,以控制测试范围。
我们的目标是本月将 12.1.0 版本进入私人测试阶段。
文档更新情况如何? 可能只有三个地球上的人关心这个,但经过十年(或者说是耻辱的徒步之旅),我被逼着更新了.net文件格式规范。所以如果这对您有兴趣,我为延迟和即将遭受的痛苦都表示歉意。X-Plane中的路景文件格式非常复杂,我实际上不建议任何人尝试破解它,但它也不是一个秘密。
景观,现在和未来 我正在努力解决水体和正射影像问题,希望能在12.1.0中完成。我们还将重新切割DSF(希望是为了12.1.0,但也可能是为了12.2.0),以解决网关机场边界和跑道波动的问题。
在蒙特利尔,我讨论了一下X-Plane景观系统的未来,但这足够复杂,需要另一篇博客文章来解释。
-
-
介绍X-Plane商店
X-Plane官方网站介绍了将要推出的"X-Plane商店"功能,这是一个大好消息,能省去用户管理插件的麻烦操作,非常值得期待。 Introducing: The X-Plane Store
 下面就用ChatPGT把原文翻译一下,使用Prompt如下
下面就用ChatPGT把原文翻译一下,使用Prompt如下你是一位专业中英文翻译,请向提问者提示,并把问题的英文翻译成中文。翻译过程为两步,第一步先用直译翻译,第二步对直译结果用自然的中文再此意译。
介绍:X-Plane商店! 我们正在将X-Plane插件体验提升到一个新水平,通过创建一个市场,开发人员可以直接在应用程序内向用户销售其产品。 这个平台将简化用户购买X-Plane内容的体验,并使开发人员能够继续为该平台做出优秀的工作。 以下是对您意味着什么以及一些我们在网上看到的常见问题的快速概述。
对于用户意味着什么:
- 在线购物体验和X-Plane应用内的购物体验得到了简化。
- 账户基础设施确保您购买的产品不会丢失(不再需要激活密钥!)。
- 所有产品都有透明的评论。
- 产品自动下载/安装/更新至X-Plane(不再需要在各个地方处理压缩文件)。
- 对所有插件进行严格的质量审查,以确保高质量和安全性。
- 版本兼容性筛选。
- 简单、安全的付款方式。
对于开发者意味着什么:
- 他们的产品能够获得更高的曝光度/更高的转化率。
- 提供了内置的数字版权管理系统,对飞机和插件免费提供(也许景观也是,我们正在努力)。
- 对产品接受标准和支持期望有清晰的指导方针。
FAQ
Q: X-Plane商店何时可用? A: 我们计划在2024年推出。我认为可能是第三季度,但用户体验的质量将是我们最终的考量因素。
Q: 我们会封锁X-Plane吗?(所有插件都必须来自商店吗?) A: 不!绝对不会!X-Plane将继续像现在一样加载非商店的插件。 我强调这一点的重要性:我们不会封锁X-Plane。在蒙特利尔,奥斯汀谈到了可修改性(改变X-Plane并探索其内部的能力,而不是盗版的"黑客")是X-Plane的核心价值观;几乎每个在场的人都是通过探索内部并进行修改和添加插件而开始接触X-Plane的,我们不会改变这一点。 基本上:商店将是一个新的功能,为购买和安装插件提供良好的用户体验,但我们不会移除现有的功能。因此,现有的插件将继续"正常工作",因为它们不受商店的影响。
Q: 我现有的插件还能继续使用吗? A: 是的!我们不会阻止第三方的任何插件加载,也不会移除任何允许第三方安装和运行插件的功能。
Q: 免费插件还能继续使用吗? A: 是的!我们仍然会像以前一样加载景观包、飞机和插件 - 如果插件不是商店插件,它将像往常一样加载。
Q: 在X-Plane商店销售的作者是否必须专属于商店销售? A: 不!我们不要求在我们的商店销售时签署独家协议。
Q: 任何人都可以在商店上销售吗? A: 在X-Plane商店上销售将对符合我们的接受标准的任何作者开放!商店将设有质量控制流程,并明确指导哪些内容可以销售,以客户体验为首要考量。
Q: 我从其他商店购买的产品会转移到这里吗? A: 虽然我们仍在积极开发中,但我们计划提供一个实用程序,以帮助开发者在选择的情况下过渡现有的购买记录 🙂
Q: 带有SASL/Gizmo等加密的插件仍然能使用吗? A: 是的 - 就像任何其他插件或附加组件一样,这些工具将继续正常工作。如果SASL/Gizmo飞机的开发者想在我们的商店中销售他们的产品,并因此使用我们的数字版权管理系统,他们的插件将需要进行微小修改以适应这一点。
Q: 你们会淘汰.org/x-aviation或其他供应商吗? A: 不会!我们从项目开始就做出了设计选择,以确保我们不会抑制任何竞争。事实上,我们欢迎竞争!
Q: 现在X-Plane会变成一个疯狂的广告集市吗,因为应用程序有了商业组件? A: 天哪,绝对不会!这恰恰是我们认为良好用户体验的完全相反的做法。
-
分类
-
归档
-
时隔半年的羽田机场第二航站楼
今年夏天高温持续了3-4个月,无心出门拍照,所以有3个多月都没有摸相机了。 进入10月后终于有了些凉意,周六来羽田机场散散心。 一如既往的展望台来航空爱好者还是很多, 不过看微单使用者已成主流,像我这样的单反已成少数派了。
 今天最意外的是一驾Hawker Beechcraft 350i King Air (B300),
在羽田如此小型螺旋桨飞机真是稀客了。
今天最意外的是一驾Hawker Beechcraft 350i King Air (B300),
在羽田如此小型螺旋桨飞机真是稀客了。
 东京迪斯尼乐园40周年纪念彩绘机还是头一次看到,
构图上把东京迪斯尼乐园和这架波音767能放到一起也是不错。
东京迪斯尼乐园40周年纪念彩绘机还是头一次看到,
构图上把东京迪斯尼乐园和这架波音767能放到一起也是不错。
机场即景



















很久没拍照,编辑照片更是手生的不行, 先传几张照片上来看看效果如何吧。
-
X-Plane 12.0.8的功能, 12.1.0的前景,以及涨价计划
Coming in X-Plane 12.0.8 and beyond - Roadmap Update
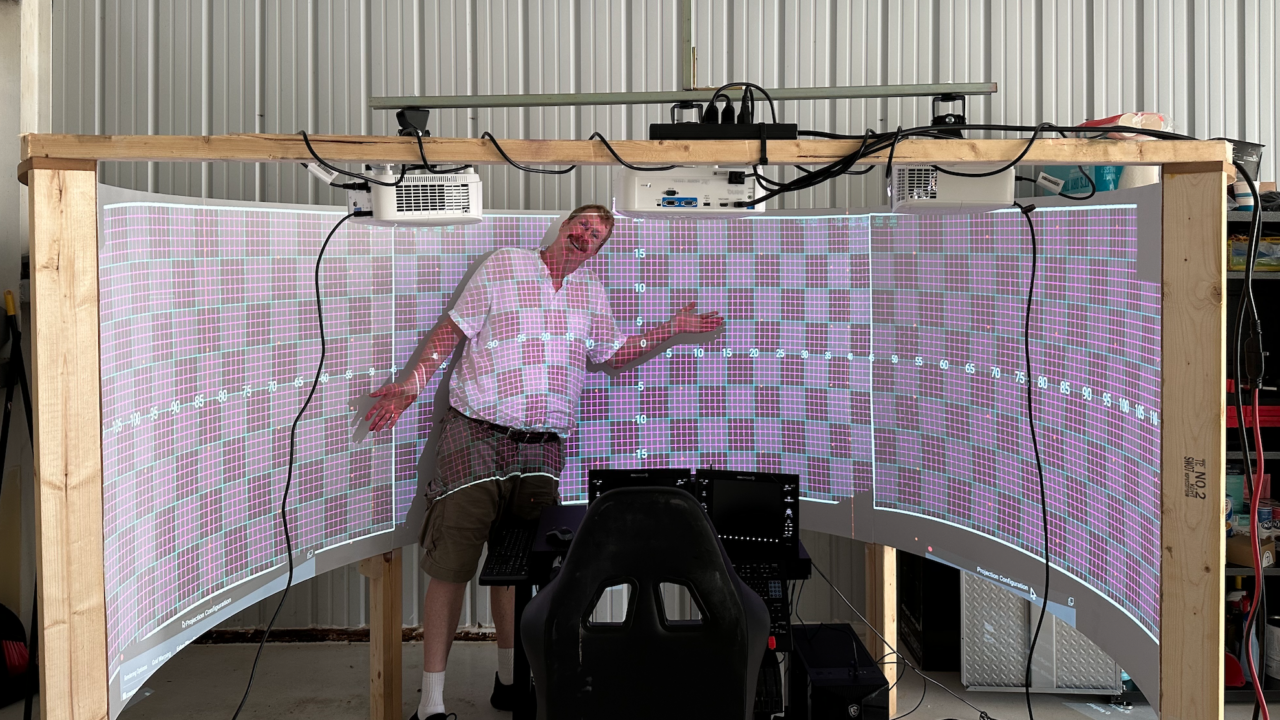
我们的团队目前正在准备X-Plane 12.0.8的测试版 - 我们预计在接下来的一两周内会有一些准备好的东西。 此次更新主要关注改进X-Plane飞行模型(用于确定模拟中飞机实际飞行方式的数学模型)、网络/多监视器以及用于与投影仪一起使用X-Plane的工具。
投影仪校正/混合 使用多个投影仪来显示你周围的世界是飞行模拟中的黄金标准。 但是有一个问题 - 当你将多个投影仪对准弯曲的屏幕时,每个投影仪的图像看起来都会奇怪而扭曲。 我们通过重新排列X-Plane发送到投影仪本身的像素来解决这个问题 - 从而产生一个视觉上正确的图像。 在幕后,这是由各种三角法和计算来支持的,但最终用户只需要将一个网格图案与他们的显示器对齐,然后就可以使用了! 这个功能将在我们的X-Plane专业许可证中提供。
发动机模型改进 Austin对X-Plane模拟引擎性能的方式进行了各种改进。 现在,喷气机、涡轮螺旋桨和往复式引擎更加精确地按照真实世界的测试数据进行模拟。 我们使用了普拉特·惠特尼(Pratt & Whitney)和菲利普·林格勒(Philipp Ringler)的数据,以确保一切都"准确无误"地运行。😉

起落架物理学 定义起落架与地面互动的数学模型现在在三个关键方面更加逼真:
轮毂惯性 - 这意味着更平稳的着陆,赢了!飞机主起落架上的轮胎现在在着陆后会更快地达到飞机的速度,从而在着陆滑行期间减少了前起落架的前倾/撞击。
焊接建模 - 这段代码控制了每个轮子在滚动和停滚之间的过渡。这听起来可能微不足道,但考虑到它涉及到飞机停放与不停放以及低速滑行的每个过渡,确保它正确无误非常重要!
ABS修订 - 对X-Plane中防抱死制动系统在着陆后减速的逻辑进行了微调,以避免过多的打滑声。

新的燃油温度模型 你知道吗,喷气飞机实际上是用燃油来冷却它们的机油的吗? 这就是为什么它们没有像你的老塞斯纳172那样的可见机油冷却器! 机油加热燃油,而燃油通过机翼的表面散发热量! 因此,实际上,喷气飞机将它们的机翼用作散热器。
现在,这一过程在X-Plane 12中得到了完全模拟。 在数据输出屏幕中查看燃油温度的详细信息,以查看它对你最喜欢的喷气飞机的影响。
网络和外部视觉同步 ……都经历了一系列的错误修复,以改善在使用多台计算机驱动多个显示器的设置中使用X-Plane时的体验。
图形质量错误修复 12.0.8版本主要关注X-Plane的物理方面,但图形团队已经包含了两个快速修复来解决紧急问题:
最常见的"完全超出VRAM"的崩溃问题已经解决 用户不应再在弹出窗口时遇到长时间的暂停情况
接下来:X-Plane 12.1.0(图形方面!) 12.1.0版本是我们计划整合我们的图形团队在过去几个月中一直在研发的有趣功能的发布版本。期望看到以下内容:
真实天气改进 当启用真实天气时,不再出现方形的"Minecraft"云层形态。
云层在水上的投影 更好的波动照明效果 RCAS(Robust Contrast Adaptative Sharpening,强大的对比适应性锐化) 更柔和,较少锯齿状的地面阴影 MSAA(多重采样抗锯齿)改进 光度学正确的MSAA分辨率 对Alpha剪切纹理的MSAA改进 改进的CPU性能 得益于我们的新的"现代收集器" - 这是模拟器用来查找绘制所需的所有景观的代码。我们知道现在很多用户在X-Plane中受到CPU限制,这是改善他们在模拟器中体验的第一步。
-
X-Plane 12.06的大量新功能
X-Plane 12.06 Is Full of Many Things 内容还是靠ChatGPT的英中翻译完成的。
升级以后测试了一下,
 我对新的云层还是非常满意的, 显示更接近于真实的云,而且性能不错,桢频毫无下降。
我对新的云层还是非常满意的, 显示更接近于真实的云,而且性能不错,桢频毫无下降。云和天气 自从X-Plane 12.0发布以来,我们一直在致力于改进云和天气系统的性能、准确性和质量。12.06版本实现了此多步骤过程的前两个阶段:
云层着色器现在更快,并且减少了伪影。丹尼尔重新编写了云层推进方式,修复了斑马条纹问题,并且总体上使画面不那么像素化和丑陋。 云层着色器还包含了用于卷云的专用路径,这应该比我们在12.0版本中拥有的卷层云看起来更好(“高空非常薄的层状云”)。 我和亚历克斯重建了构建每种天气类型的噪声函数,以获得外观更好的各种云层。
虽然其中包括了一些真实天气的修复,但我们并没有全面更新真实天气;我的想法是,如果没有适当的渲染,我们将无法确定真实天气是否真的有所改进。
即将推出的功能:在测试版2中,“Minecraft风格的云”(例如方块状的立方云,尤其是在真实天气下)将会被修复,所以在还能使用它们之前尽情享受。厚重的棱柱状卷云也将被修复,我们将优化预设和METAR解析。
未来展望:我们计划在3D云层后面添加一个2D的"云层外壳",以处理轨道视图,并使地球看起来不那么奇怪;而且我们将会对真实天气进行详尽的检查和优化。
光线 X-Plane 12.06修复了一些天空颜色的常量,但并不是一个光线更新。我们内部进行了一系列的光线修复,但计划是谨慎施行,一次性完成,例如在所有更改都完成后再进行一次性更新光线。
改善黑暗驾驶舱位于我们的待办列表中的重要位置,但我们也不想一次又一次地调整驾驶舱内的光线水平,这样做会影响到第三方开发者。
我预计,当我们重新校准驾驶舱光线时,可能需要对一些飞机进行轻微的更新,但那些已选择自行"修复"驾驶舱亮度(通过增加额外的光源或篡改材质)的第三方开发者可能需要撤销他们的修改。在我们达到这一点时,我会尽量提供清晰的指导和早期版本,但光线照明仍处于"开发中"。
渲染和VRAM X-Plane 12.06最大的改变并不是你能够看到的:我们将主要渲染流水线从12.0(手工编码的)转换为渲染节点图。
渲染图在当今非常流行;如果你对此感兴趣,可以查看类似于AMD的渲染流水线着色器。 但这是为什么要进行这个改变: 渲染图使我们能够在渲染主帧时预留一部分VRAM。X-Plane 12的渲染流水线比X-Plane 11复杂得多,这导致了VRAM的使用量增加。
在12.06中,我们更像将VRAM当作AirBnB(短期出租)而不是第二个家 - 在帧的不同时间,渲染流水线的不同部分使用相同的VRAM块,这意味着我们对于特效需要的VRAM总量较少。这种改变在X-Plane 11中是不可能的 - 你不能使用OpenGL重复预留VRAM。
但是,如果手动编码分配别名会非常繁琐 - 渲染节点图大部分自动化了这一过程并防止了错误。
即将推出的功能:在测试版2中,我们有一个性能优化,应该有助于CPU受限的用户。
未来展望:在将来,渲染节点图还将使我们能够使用不同的CPU核心来渲染帧的不同部分,以提高CPU利用率,并使CPU限制的用户获得更高的帧率。在这方面,我们还有很多工作要做,但渲染节点图再次使这成为可能。
ATC和AI飞机 12.06版本有很多ATC改进 - 吉姆数月的工作在测试版1中已经发布。我会尽量让吉姆撰写一篇关于详细内容的博客文章。
对ATC的一个重大改进:奥斯汀修复了许多AI飞行员的问题。这对ATC产生影响,因为AI飞机飞行更可靠,不太可能发生坠毁,从而导致机场运营停滞。我们预期稳定性将会改善,因为AI飞机坠毁导致的数值不稳定性有时会导致整个模拟器崩溃。
未来展望:吉姆将继续进行更多的ATC修复,并致力于SID/STAR支持。
开发流程中接下来的内容 X-Plane的开发按照一个流程进行:在我输入这些内容时…
12.05版本已发布 12.06b1版本处于公开测试阶段 12.06b2版本正在进行内部测试,准备进行公开测试 12.06b3版本正在开发中 - 大约一半的beta 3问题已经得到解决,我们正在处理剩下的问题。 12.07版本的开发几乎完成 - 目前正在进行开发和测试的混合阶段。 我们正在着手开发12.08及以后的功能。
第三方开发者:我相信所有已知的第三方兼容性问题都计划在beta 3中得到解决,其中大部分问题已经得到修复。但是这些修复未能及时进入beta 2,那是几天前的事情。我们希望下周初发布beta 3。
我们尽量不因为几乎准备就绪的修复而耽搁发布测试版 - 如果这样做的话,测试版将永远无法发布,因为总会有一个几乎准备好的修复。
-
X-Plane12 A330 POH 5
Check Lists
下面的检查清单是为方便模拟飞行员而设计的,并根据X-Plane A330-300飞机进行了定制。这些与真实飞机的检查清单有所不同。
Cold and Dark to Engine Start 从冷舱状态到发动机起动 以下检查清单是真实程序的子集,仅包括从冷舱状态到发动机起动所需的基本步骤: PARKING BRAKE - ON
TRANSPONDER - STANDBY
BAT1 - ON BAT2 - ON
(EXTERNAL POWER) EXTA - ON BEACON - ON NAV LIGHTS - ON
APU BATTERY ON APU MASTER - ON APU - START
Wait for APU startup. (APU AVAIL displayed)
APU GENERATOR - ON
(EXTERNAL POWER) EXTA - OFF
ADIRS IR1 / IR2 / IR3 - ON ADR1 / ADR2 / ADR3 - ON ADIRS Rotaries - NAV
-
X-Plane12 A330 POH 4
Glareshield Panel(遮阳板面板)

Annunciator Panel(告警面板) MASTER WARNING(主警告):用于表示3级严重程度警告的亮起并闪烁。机组必须取消告警。 MASTER CAUTION(主注意):用于表示2级严重程度注意的亮起。机组必须取消告警。 AUTO LAND(自动着陆):如果飞机正在进行无法完成的自动着陆,此警告灯会亮起。机组必须接管飞机的控制权并取消告警。 SIDE STICK PRIORITY(侧杆优先):如果由于两名飞行员同时进行侧杆输入而产生冲突,此灯将亮起。
EFIS控制面板 该面板独立地控制飞行员和副驾驶员的EFIS显示的各个方面。 气压旋钮用于控制高度表设置。外旋钮在英寸汞柱和百帕之间切换。内旋钮用于设置所需压力。
 FD:将飞行导引条在开启和关闭之间切换。这些显示提供了PFD上的可视指引,以便飞行员遵循当前的飞行计划或进近过程。
LS:在ILS进近过程中,切换着陆系统下滑道显示。
ADF1/VOR1:显示使用MCDU调谐的ADF1或VOR1频率的ADF指针或VOR航向偏离指示器。
ADF2/VOR2:显示使用MCDU调谐的ADF2或VOR2频率的ADF指针或VOR航向偏离指示器。
Mode Rotary(模式旋钮):在可用的显示模式之间切换MFD。
Range Rotary(范围旋钮):调整MFD地图的比例尺。
CSTR(约束):当亮起时,PFD将显示附近的高度和速度约束。
WPT(航路点):当亮起时,PFD将显示附近的航路点。
VOR.D(VOR台站):当亮起时,PFD将显示附近的VOR台站。
NDB(NDB台站):当亮起时,PFD将显示附近的NDB台站。
ARPT(机场):当亮起时,PFD将显示附近的机场。
FD:将飞行导引条在开启和关闭之间切换。这些显示提供了PFD上的可视指引,以便飞行员遵循当前的飞行计划或进近过程。
LS:在ILS进近过程中,切换着陆系统下滑道显示。
ADF1/VOR1:显示使用MCDU调谐的ADF1或VOR1频率的ADF指针或VOR航向偏离指示器。
ADF2/VOR2:显示使用MCDU调谐的ADF2或VOR2频率的ADF指针或VOR航向偏离指示器。
Mode Rotary(模式旋钮):在可用的显示模式之间切换MFD。
Range Rotary(范围旋钮):调整MFD地图的比例尺。
CSTR(约束):当亮起时,PFD将显示附近的高度和速度约束。
WPT(航路点):当亮起时,PFD将显示附近的航路点。
VOR.D(VOR台站):当亮起时,PFD将显示附近的VOR台站。
NDB(NDB台站):当亮起时,PFD将显示附近的NDB台站。
ARPT(机场):当亮起时,PFD将显示附近的机场。飞行控制单元(自动驾驶仪)
 该面板控制自动驾驶仪的参数和模式。
速度、航向、垂直速度和高度可以由飞行员具体选择(通过将适当的旋钮拉到"选择模式"),也可以由飞行管理引导系统(FMGS)自动管理(通过将适当的旋钮推到"管理模式")。
在自动管理模式下,系统将根据当前情况、飞机配置和飞行计划选择适当的参数,并在相应的显示旁显示一个点。
该面板控制自动驾驶仪的参数和模式。
速度、航向、垂直速度和高度可以由飞行员具体选择(通过将适当的旋钮拉到"选择模式"),也可以由飞行管理引导系统(FMGS)自动管理(通过将适当的旋钮推到"管理模式")。
在自动管理模式下,系统将根据当前情况、飞机配置和飞行计划选择适当的参数,并在相应的显示旁显示一个点。SPD/Mach(速度/马赫数):在节和马赫数之间切换速度选择。 Speed Rotary(速度旋钮):在"选择模式"下设置所需的速度。 HDG Rotary(航向旋钮):在"选择模式"下设置所需的航向。 AP1/AP2:切换自动驾驶仪的开启或关闭。为了冗余性,有两个完全相同的系统,分别标记为AP1和AP2。 A/THR:切换自动推力模式。开启时,自动驾驶仪控制着油门,使其进行必要的推力调整以符合所选项。关闭时,飞行员可以手动控制推力。 Altitude Pre-Select Rotary(高度预选择旋钮):设置所需的高度。内旋钮按100英尺的单位增加/减少,外旋钮按1,000英尺的单位增加/减少。预先选择所需的高度,然后将旋钮向上拉动以捕获它。 ALT:点击此按钮以立即在当前高度上水平飞行,覆盖任何已经做出的预先选择。 LOC:点击此按钮将自动驾驶仪置于"局部导航"模式。如果选择了局部导航频率,自动驾驶仪将尝试仅截获局部导航信标,前提是所需的自动驾驶输入不过大。 APPR:点击此按钮将自动驾驶仪置于"进近"模式。如果选择了ILS频率,自动驾驶仪将尝试截获局部导航信标,并捕获下滑道,前提是所需的自动驾驶输入不过大。 Vertical Speed Rotary(垂直速度旋钮):在爬升或下降至预先选择的高度时调整垂直速度。首先使用高度旋钮预先选择所需的高度,然后使用VS旋钮选择所需的速率。向上拉动VS旋钮以开始上升/下降。 HDG+VS/TRK+FPA:在航向+垂直速度模式和航迹+飞行航径角模式之间切换自动驾驶模式。在后一种模式下,自动驾驶仪通过补偿风偏来维持所需的航迹,以及所需的爬升/下降角度,而不是速率(每秒英尺)。
Center Pedestal

多功能控制和显示单元(MCDU)
MCDU执行多种功能,其中许多功能在三人驾驶舱时代由飞行工程师负责。 该面板是机组与飞行管理引导计算机(FMGC)之间的主要接口。中央嵌板上有两个MCDU面板,机长和副驾驶员可以独立操作这些面板。 MCDU的主要功能是导航。通过输入和执行飞行计划或直接导航到选定的航路点来实现。
设置ILS、VOR和ADF站点的导航设备频率: NAV/RAD:点击此按钮以输入ILS、VOR或ADF站点的频率。 使用CLR按钮清除暂存区(显示屏上用于文本输入的最后一行)。 使用数字键盘输入所需频率,该频率将出现在暂存区中。 点击VOR / LS / ADF旁边的按钮来编程指定频率。例如,如果您打算使用110.75的ILS频率,将该频率输入到暂存区中,然后点击左上方的LS按钮。 注意:将提供一份单独的文档详细介绍MCDU的功能。