X-Plane12版本信息
-
X-Plane12 A330 POH 5
Check Lists
下面的检查清单是为方便模拟飞行员而设计的,并根据X-Plane A330-300飞机进行了定制。这些与真实飞机的检查清单有所不同。
Cold and Dark to Engine Start 从冷舱状态到发动机起动 以下检查清单是真实程序的子集,仅包括从冷舱状态到发动机起动所需的基本步骤: PARKING BRAKE - ON
TRANSPONDER - STANDBY
BAT1 - ON BAT2 - ON
(EXTERNAL POWER) EXTA - ON BEACON - ON NAV LIGHTS - ON
APU BATTERY ON APU MASTER - ON APU - START
Wait for APU startup. (APU AVAIL displayed)
APU GENERATOR - ON
(EXTERNAL POWER) EXTA - OFF
ADIRS IR1 / IR2 / IR3 - ON ADR1 / ADR2 / ADR3 - ON ADIRS Rotaries - NAV
-
X-Plane12 A330 POH 4
Glareshield Panel(遮阳板面板)

Annunciator Panel(告警面板) MASTER WARNING(主警告):用于表示3级严重程度警告的亮起并闪烁。机组必须取消告警。 MASTER CAUTION(主注意):用于表示2级严重程度注意的亮起。机组必须取消告警。 AUTO LAND(自动着陆):如果飞机正在进行无法完成的自动着陆,此警告灯会亮起。机组必须接管飞机的控制权并取消告警。 SIDE STICK PRIORITY(侧杆优先):如果由于两名飞行员同时进行侧杆输入而产生冲突,此灯将亮起。
EFIS控制面板 该面板独立地控制飞行员和副驾驶员的EFIS显示的各个方面。 气压旋钮用于控制高度表设置。外旋钮在英寸汞柱和百帕之间切换。内旋钮用于设置所需压力。
 FD:将飞行导引条在开启和关闭之间切换。这些显示提供了PFD上的可视指引,以便飞行员遵循当前的飞行计划或进近过程。
LS:在ILS进近过程中,切换着陆系统下滑道显示。
ADF1/VOR1:显示使用MCDU调谐的ADF1或VOR1频率的ADF指针或VOR航向偏离指示器。
ADF2/VOR2:显示使用MCDU调谐的ADF2或VOR2频率的ADF指针或VOR航向偏离指示器。
Mode Rotary(模式旋钮):在可用的显示模式之间切换MFD。
Range Rotary(范围旋钮):调整MFD地图的比例尺。
CSTR(约束):当亮起时,PFD将显示附近的高度和速度约束。
WPT(航路点):当亮起时,PFD将显示附近的航路点。
VOR.D(VOR台站):当亮起时,PFD将显示附近的VOR台站。
NDB(NDB台站):当亮起时,PFD将显示附近的NDB台站。
ARPT(机场):当亮起时,PFD将显示附近的机场。
FD:将飞行导引条在开启和关闭之间切换。这些显示提供了PFD上的可视指引,以便飞行员遵循当前的飞行计划或进近过程。
LS:在ILS进近过程中,切换着陆系统下滑道显示。
ADF1/VOR1:显示使用MCDU调谐的ADF1或VOR1频率的ADF指针或VOR航向偏离指示器。
ADF2/VOR2:显示使用MCDU调谐的ADF2或VOR2频率的ADF指针或VOR航向偏离指示器。
Mode Rotary(模式旋钮):在可用的显示模式之间切换MFD。
Range Rotary(范围旋钮):调整MFD地图的比例尺。
CSTR(约束):当亮起时,PFD将显示附近的高度和速度约束。
WPT(航路点):当亮起时,PFD将显示附近的航路点。
VOR.D(VOR台站):当亮起时,PFD将显示附近的VOR台站。
NDB(NDB台站):当亮起时,PFD将显示附近的NDB台站。
ARPT(机场):当亮起时,PFD将显示附近的机场。飞行控制单元(自动驾驶仪)
 该面板控制自动驾驶仪的参数和模式。
速度、航向、垂直速度和高度可以由飞行员具体选择(通过将适当的旋钮拉到"选择模式"),也可以由飞行管理引导系统(FMGS)自动管理(通过将适当的旋钮推到"管理模式")。
在自动管理模式下,系统将根据当前情况、飞机配置和飞行计划选择适当的参数,并在相应的显示旁显示一个点。
该面板控制自动驾驶仪的参数和模式。
速度、航向、垂直速度和高度可以由飞行员具体选择(通过将适当的旋钮拉到"选择模式"),也可以由飞行管理引导系统(FMGS)自动管理(通过将适当的旋钮推到"管理模式")。
在自动管理模式下,系统将根据当前情况、飞机配置和飞行计划选择适当的参数,并在相应的显示旁显示一个点。SPD/Mach(速度/马赫数):在节和马赫数之间切换速度选择。 Speed Rotary(速度旋钮):在"选择模式"下设置所需的速度。 HDG Rotary(航向旋钮):在"选择模式"下设置所需的航向。 AP1/AP2:切换自动驾驶仪的开启或关闭。为了冗余性,有两个完全相同的系统,分别标记为AP1和AP2。 A/THR:切换自动推力模式。开启时,自动驾驶仪控制着油门,使其进行必要的推力调整以符合所选项。关闭时,飞行员可以手动控制推力。 Altitude Pre-Select Rotary(高度预选择旋钮):设置所需的高度。内旋钮按100英尺的单位增加/减少,外旋钮按1,000英尺的单位增加/减少。预先选择所需的高度,然后将旋钮向上拉动以捕获它。 ALT:点击此按钮以立即在当前高度上水平飞行,覆盖任何已经做出的预先选择。 LOC:点击此按钮将自动驾驶仪置于"局部导航"模式。如果选择了局部导航频率,自动驾驶仪将尝试仅截获局部导航信标,前提是所需的自动驾驶输入不过大。 APPR:点击此按钮将自动驾驶仪置于"进近"模式。如果选择了ILS频率,自动驾驶仪将尝试截获局部导航信标,并捕获下滑道,前提是所需的自动驾驶输入不过大。 Vertical Speed Rotary(垂直速度旋钮):在爬升或下降至预先选择的高度时调整垂直速度。首先使用高度旋钮预先选择所需的高度,然后使用VS旋钮选择所需的速率。向上拉动VS旋钮以开始上升/下降。 HDG+VS/TRK+FPA:在航向+垂直速度模式和航迹+飞行航径角模式之间切换自动驾驶模式。在后一种模式下,自动驾驶仪通过补偿风偏来维持所需的航迹,以及所需的爬升/下降角度,而不是速率(每秒英尺)。
Center Pedestal

多功能控制和显示单元(MCDU)
MCDU执行多种功能,其中许多功能在三人驾驶舱时代由飞行工程师负责。 该面板是机组与飞行管理引导计算机(FMGC)之间的主要接口。中央嵌板上有两个MCDU面板,机长和副驾驶员可以独立操作这些面板。 MCDU的主要功能是导航。通过输入和执行飞行计划或直接导航到选定的航路点来实现。
设置ILS、VOR和ADF站点的导航设备频率: NAV/RAD:点击此按钮以输入ILS、VOR或ADF站点的频率。 使用CLR按钮清除暂存区(显示屏上用于文本输入的最后一行)。 使用数字键盘输入所需频率,该频率将出现在暂存区中。 点击VOR / LS / ADF旁边的按钮来编程指定频率。例如,如果您打算使用110.75的ILS频率,将该频率输入到暂存区中,然后点击左上方的LS按钮。 注意:将提供一份单独的文档详细介绍MCDU的功能。
-
X-Plane12 A330 POH 3
Primary Instrument Panels

主飞行显示器(PFD) 这是航空电子设备集群中左侧的液晶面板。PFD显示飞机相对于地平线的姿态,以及海拔高度(相对于海平面),通过右侧的刻度显示。 姿态显示告知飞行员飞机是直飞还是转弯,以及飞机是在上升还是下降。 这些信息在"仪表条件"下非常重要,即当外部地平线不可见时。 PFD还显示高度和空速信息,以及与ILS进近相耦合时的局部导航和下滑道偏离情况。 PFD的详细内容在单独的章节中介绍:主飞行显示器(PFD)组件。
导航显示器(ND)
这是航空电子设备集群中右侧的液晶面板。ND显示飞机的位置和(磁性)航向。 该显示以平面视图呈现,就好像从正上方俯视飞机一样。 如果已输入飞行计划(使用FMS),该面板还会显示飞机相对于期望航迹的位置。 ND的详细内容在单独的章节中介绍:导航显示器(ND)组件
综合备用仪表系统(ISIS) 在主要PFD发生故障时,该仪表提供冗余功能。 ISIS由独立的电源供电,并使用专用陀螺仪和加速度计。 该仪表显示: 姿态; 空速; 高度; 气压(可设置); 空速刻度(可设置);
电子集中飞机监控(ECAM)/发动机和警告显示 该面板显示: 发动机压力比(EPR); 发动机排气温度(EGT); 发动机低压涡轮转速(N1); 发动机高压涡轮转速(N2); 燃油数量; 襟翼和缝翼位置; 该显示面板的详细内容在单独的章节中介绍:ECAM发动机和警告显示组件
电子集中飞机监控(ECAM)/系统显示 飞机系统的综合图示; 飞机系统状态信息; 该显示面板的详细内容在单独的章节中介绍: ECAM系统显示组件。
起落架和自动刹车
该面板左下方的杆用于展开和收起起落架。 该面板左上方有三个起落架指示器,分别对应前轮和左/右主起落架。 当起落架放下并锁定时,三个指示灯将显示绿色。 当起落架运动时,它们将显示为琥珀色的未锁定状态。 当起落架完全收起时,指示灯将显示无状态。
AUTO/BRK:这些按钮控制自动刹车在着陆和中止起飞过程中施加的速率。 LO用于在长/干燥的跑道上着陆。 MED用于在短/湿滑的跑道上着陆。 MAX用于中止起飞,并且只能在地面上设置。如果在起飞过程中部署扰流板,刹车将被触发。 TERR ON ND:点击此按钮以在导航显示器(ND)地图上叠加显示地形雷达。
Chronometer计时器 该仪表显示当前的当地时间和飞行累计时间。它还配备了一个计时器,用于计时飞行中的事件。 CHR:点击此按钮开始和停止计时器。 RST:点击此按钮重置计时器。 RUN:点击此按钮启动(飞行)累计计时器。只有在飞行中才可用。
Primary Flight Display (PFD) Components

1 自动推力告示器: 当自动驾驶管理空速时亮起 2 垂直模式告示器: 当自动驾驶垂直模式生效时亮起 3 侧向模式告示器: 当自动驾驶侧向模式生效时亮起 4 参与状态 : 显示自动驾驶、飞行指引仪和自动油门参与状态 5 选定高度 : 由机组预先选定的高度 6 维持高度: 水平稳定高度(实际稳定高度)蓝色=选定/洋红色=限制) 7 当前高度 8 高度趋势 9 气压高度表参考: 由机组设置 10 TRU(真实)告示器 : 如果空速刻度显示真空速(而非指示空速),则亮起 11 静态参考线: 静态参考线显示飞机相对于人工地平线的位置,包括上升、下降、左转或右转 12 ILS入航: 如果超出航向刻度的显示范围,显示在此处 13 Heading航向: 当前航向(磁性) 14 Actual Track实际航迹: 实际航迹(地面上的航迹) 15 选定航向(标记): 由机组设置 16 选定航向(数字): 以数字形式显示的选定航向 - 当航向刻度上的标记超出显示范围时显示 17 最小空速限制刻度 18 选定空速: 由机组设置 19 进近目标速度: 期望的进近速度 20 空速趋势 21空速: 当前空速(指示空速,除非TRU告示器亮起) 22 最大空速限制刻度 23 滚转速率: 滚转速率(10、20、30、45、67度)
-
X-Plane12 A330 POH 2
Airbus Flight Control Systems
所有现代的空中客车飞机(除A300和A310之外)都采用"飞控系统",强制执行空中客车的飞行控制规则,这是一套规定飞机如何响应飞行员输入的协议。
A330飞机总共有五台飞行控制计算机,包括三台主计算机(PRIM1、PRIM2、PRIM3)和两台辅助计算机(SEC1、SEC2)。 如有必要,飞机可以由任何一台单独的飞行控制计算机操作,按照最简单的空中客车飞行控制规则-“直接控制法”。
飞行控制面通过电子或液压方式操纵,并且计算机的作用是防止飞机超出安全飞行包线的纵倾、横滚、迎角和空速限制。
支持三种飞行控制规则:正常控制规则、备用控制规则和直接控制规则。 备用控制规则进一步细分为备用控制规则1和备用控制规则2。
正常控制规则 在正常飞行中,正常控制规则提供纵倾、横滚和偏航的控制。
1 地面模式 当飞机在地面上时,启用地面模式。副翼俯仰输入与升降舵响应之间存在直接关系。
2 飞行模式 一旦飞机离地并保持在100英尺以下的降落阶段,飞行模式将在5秒的时间间隔内逐渐替代地面模式。 飞行模式包括纵倾姿态、迎角、载荷因子、高速和滚转角度保护。 当副翼中立时,飞行控制系统保持1g的载荷因子。 在进行转弯时,载荷因子会自动调节,并与副翼偏转成正比。此外,在转弯过程中,飞行控制系统会根据需要自动修正,以保持水平飞行(对于最大33°的滚转角度)。 如果飞机在转弯过程中上升或下降,系统会努力保持原始的三维空间几何路径。 这意味着在转弯过程中飞行员无需施加副翼向后的压力。 然而,如果滚转角度超过33°或载荷超过1.3g,则自动修正将解除。 飞行控制系统确保载荷因子保持在-1g至+2.5g的范围内,
俯仰角在-15°至+30°之间。 因此,无论副翼输入如何,飞行员无法超出这些限制。 在速度范围的下限(琥珀色区域),系统将确保迎角不超过最大允许值(标记为a-max)。 当超过临界空速(Vmo)时,高速保护自动启动。 系统降低副翼的俯仰控制权,并施加持续的向上俯仰指令,直到速度低于Vmo,然后恢复正常控制规则。 在进行转弯时,系统将不允许飞机超过67°的滚转角度,即使进行最大副翼偏转,当压力释放时,飞机将返回到33°的滚转角度。
3 Flare Mode 当雷达高度计记录到100英尺或更低的高度时,此模式将自动启动。 副翼的俯仰输入直接转化为升降舵的相应运动。 当高度达到50英尺或更低时,系统会发出一个俯仰下压的修正指令,需要飞行员通过增加俯仰上升来实现期望的触地时的抬头过程。
备用控制规则 在一个或多个关键飞行控制部件故障的情况下,备用控制规则将生效。
备用控制规则1(ALT1) 当升降舵、偏航阻尼器、襟翼或缝翼中的两个部件故障时,将启用此规则。 横向控制不受影响,仍然遵循正常控制规则。然而,系统不再提供自动俯仰保护。
备用控制规则2(ALT2) 当两个IRS/ADR装置故障、副翼或扰流板的故障,或两台发动机失去推力时,将启用此规则。 横向控制不再采用正常控制规则,而是改为采用直接控制规则(见下文)。系统不再提供自动俯仰保护或滚转角度保护。
直接控制规则 在飞行计算机或IRS/ADR装置完全失效、两个升降舵故障或两台发动机失去推力的情况下,将启用此规则。 飞行员的输入将直接转化为控制面的相应运动。
驾驶舱导览
在本手册的这一部分中,驾驶舱将被分解为不同的功能区域,并标识和描述这些区域中的控制装置。 这将有助于在以后进行飞机检查表和驾驶飞机时,找到必要的仪器和控制装置。前置顶板 Forward Overhead Panel 前置顶板由一系列较小的面板组成,用于管理飞机的电气、气动、照明、增压、发动机起动和其他系统。 在三人机组时代,其中许多曾是飞行工程师的职责范围。
注意:并非所有这些面板内的功能在X-Plane A330-300模型中都完全模拟。 后置顶板没有包含在内,因为它支持未被建模的次要功能。

- ADIRS 该面板控制飞机的三个惯性参考系统(IRS)单元和三个空气数据惯性参考(ADR)单元。
IRS单元是陀螺加速度计,用于检测横向和垂直轴上的加速度。 IRS系统为机载导航系统提供独立的数据源,以确定飞机在三维空间中的位置。 这在没有外部参考,如卫星或地面导航设备的情况下是必要的。
ADR单元从飞机探针和传感器收集数据,提供空速、气压高度、温度和迎角等信息。
ON BAT = IRS系统在飞行前使用电池供电工作。 IR1 / IR2 / IR3指示灯 ALIGN:IRS单元正在进行校准,尚未准备好导航。 FAULT:IRS单元无法提供数据 OFF:IRS单元已关闭电源
-
X-Plane12 A330 POH 1
官网上发布了Pilot Operating Handbook (POH) for X-Plane 12 A330, 正好学习一下。 这里利用ChatGPT翻译成中文出来供大家参考吧。
飞行员操作手册 作者:Julian Lockwood([email protected]) 版权所有:Laminar Research 2023 免责声明 本文档中的信息仅供X-Plane飞行模拟器内部使用。本文档不受修订,并未经过准确性检查。本文档仅供娱乐使用,不得在涉及真实飞机或真实航空的情况下使用。 分发 本文档可由Laminar Research的客户和开发人员进行复制和分发,供娱乐使用。它也可以与为X-Plane 12开发的第三方内容一起分发。
Background: The Airbus A330 空客A330是一种宽体双喷气式飞机,于1987年推出,源自该公司的首款客机A300。最初的型号是A330-300,于1992年11月首飞,并于1994年投入使用。 A330与四发引擎的A340同时开发,并共享相同的机身、“电传飞控"系统和航空电子设备。A330可选择三种发动机:通用电气CF6、普惠PW4000或劳斯莱斯特伦特700。 A330-300可容纳高达440名乘客,航程为6,300海里。原始A300系列的其他变体包括A330-200(航程较短、乘客较少)、A330-200F(货运)和A330 MRTT(加油机)。 A330neo(新引擎选项)于2014年宣布,配备劳斯莱斯特伦特7000涡扇发动机和翼尖"鲨鱼鳍”,提高燃油效率。
飞机的主要部件在英国、法国和德国的工厂制造。最终装配线位于法国科洛米埃的图卢兹-布拉尼亚克机场的空客设施。 A330的第一位客户是"Air Inter",于1994年1月开始在巴黎奥利机场和马赛之间提供商业服务。同年稍后,马来西亚航空、泰国国际航空和国泰航空也订购了该型号。
A330采用侧杆控制(取代传统的操纵杆),与A320、A330、A340和A350系列共用的"电传飞控"计算机控制系统相结合。 这种系统采用三个主要和两个次要的飞行控制系统。飞行员通过侧杆控制提供的输入以电子信号的形式通过线路传输,而不是传统的电缆。 飞行控制计算机确定如何移动控制面(副翼、升降舵、方向舵和速度刹车)以提供必要的响应,同时保持在安全飞行的"包线"内,确保飞机不超过其结构或性能能力的限制。
截至2022年底,所有A330型号累计收到1,774个订单,已交付1,560架,目前在役的有1,467架。 A330-300是最受欢迎的型号,订单量为784架,交付量为776架。 目前A330的最大运营商是达美航空,拥有62架飞机在役。
A330-300系列规格
引擎: 型号 2 x 劳斯莱斯特伦特700涡扇发动机 功率 2 x 70,000磅推力
燃料: 容量 240,000磅/109,000公斤 燃油 Jet A-1 燃烧量(平均) 每小时15,800磅
重量和容量: 最大起飞重量 533,000磅/242,000公斤 最大着陆重量 412,000磅/187,000公斤 空机运营重量 271,000磅/123,000公斤 最大有效载荷 114,000磅/52,000公斤 最大乘客数 440
性能: 巡航速度 0.86马赫 最大运行速度 0.89马赫 最终进场速度 140-160 KIAS(全襟翼/起落架放下) 起飞距离 8,200英尺/2,500米 着陆距离 4,750英尺/1,450米 航程 6,000海里 巡航高度 41,000英尺/12,500米
-
Instructor Station for X Plane 12
想设置天气、时间、故障和其他一切教员在控制X-Plane 12桌面版时要设置的东西? 那么......这个应用程序就是为了这个目的!
看到官网介绍了Instructor Station这款iOS上的app, 马上下载测试了一下,发现作为教员用途确实很是实用。 这里放几张截图出来介绍一下。
从AppStore下载安装app以后, Instructor Station会自动搜素局域网上的X-Plane12应用并完成初始设置。
 可以看到教员的管理终端UI还算非常简朴的。
可以看到教员的管理终端UI还算非常简朴的。地图设置页面

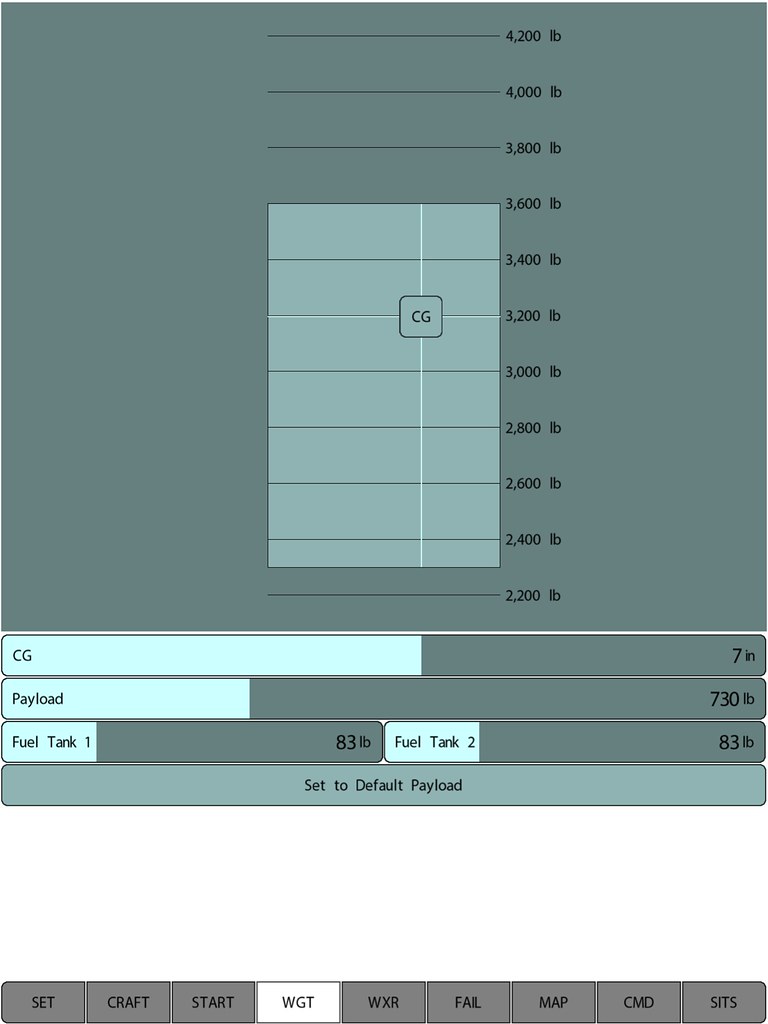
重心,负载和燃油设置
机型设置

云设置

设定完成以后的显示

最有用的也许是这个故障模拟设置,
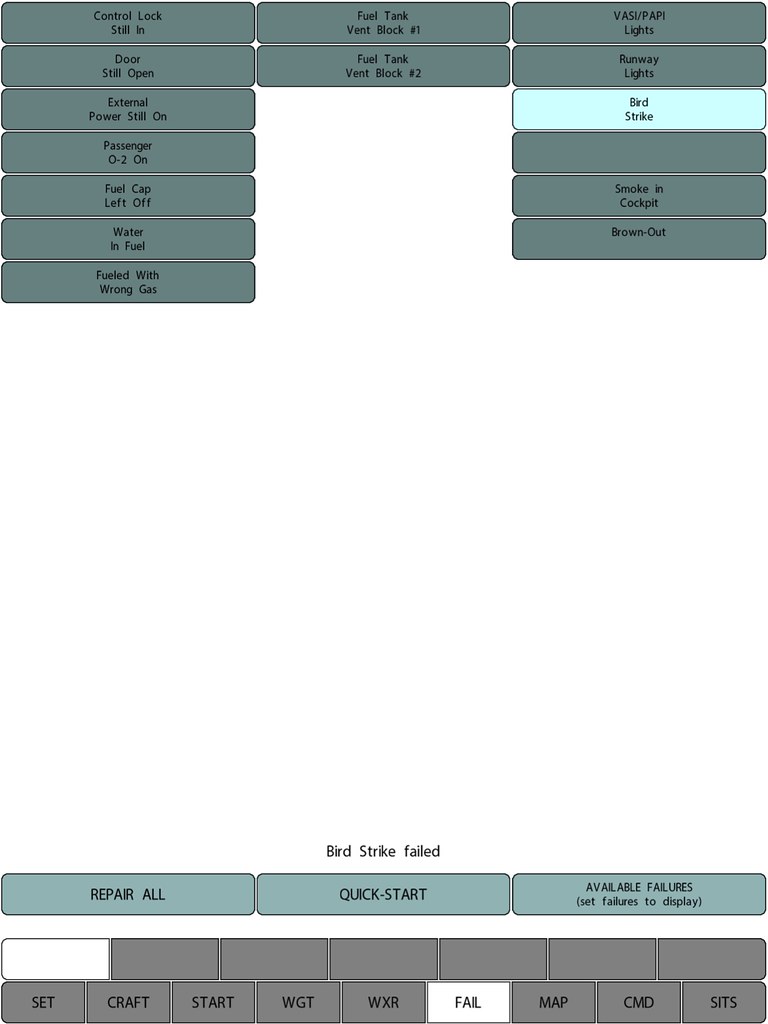
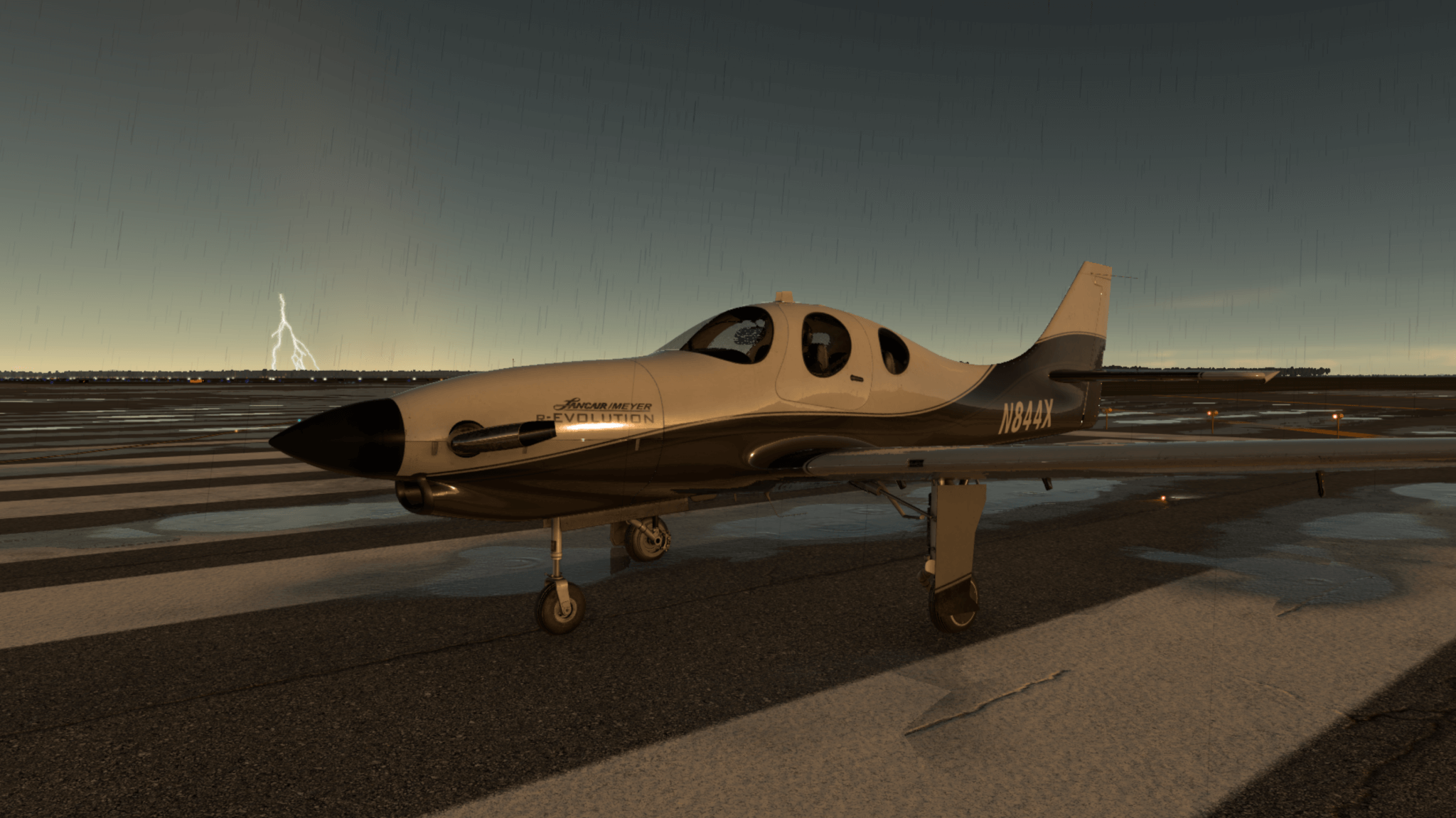
比如选择撞鸟Bird Strike以后可以看到飞机前方出现鸟群,
 过一会就可以看到发动机开始着火了。
过一会就可以看到发动机开始着火了。

比如选择驾驶舱内冒烟Smoke in Cockpit以后,
 驾驶舱内果然开始浓烟滚滚了。。。
驾驶舱内果然开始浓烟滚滚了。。。可以在油管上看到Austin亲自讲解Instructor Station的视频,他的解说要比我的介绍精彩的多了。
-
New ATC Features in X-Plane 12
官网介绍xp12里的ATC新功能总结的不错,这里简单翻译一下。 New ATC Features in X-Plane 12

XP中的新功能 -6个不同地区(亚洲、澳大利亚、欧洲、印度、美国和全球) -可选择男性和女性飞行员的声音 -根据信号接收强度与发射器的距离,以及相邻地形的变化而变化声音 -人工智能现在会等待控制员的指令,然后再执行指令
主要变化之一,也可能是最不引人注目的变化之一, 就是现在由一个全球区域系统,取代了以前单一的全球控制区域(老系统只模拟了美国特有的规则和信息)。 拥有独立的地理区域意味着世界不同地区可以使用适合当地的声音,但更重要的是各地区可以有不同的信息和标准。 为了配合口音的地区差异,系统现在支持每个地区一个以上的声音,提供更多的变化,以及男性和女性的声音。 在声音设置页面中,飞行员也可以选择男性/女性的声音。
现在,信号的接收质量考虑了与控制器的距离、相对高度、控制器的类型和任何阻挡的地形。 换句话说,如果你靠近机场,视线清晰,你会得到很好、很强、很清晰的接收效果。 如果你在几英里之外,在山脊后面低空飞行,你会很难听到控制员在说什么。 当人工智能收到控制器的指令时,它们现在会等待,直到传输完成,而不是在传输开始的瞬间执行这些指令。 这是许多小变化中的一个,在功能上并没有什么影响,但希望能增加真实感和沉浸感。
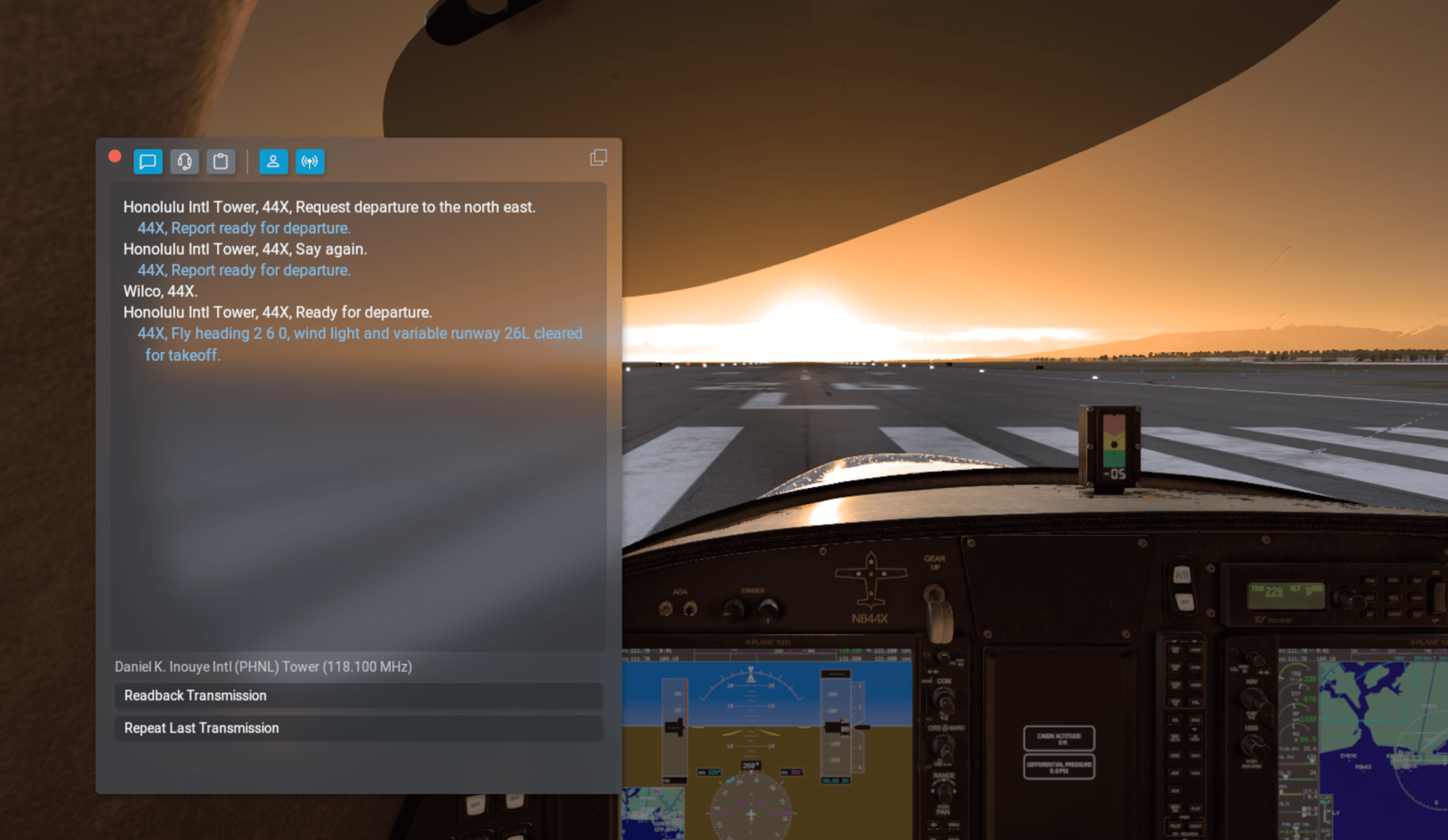
对话功能 -基于菜单的分支命令用于更复杂的呼叫 -菜单顺序优先考虑最重要的或可能的呼叫 -动态呼叫,为当前情况量身定做 -一键通话的无线电处理 -查看当前收听站的名称 -可以使用VORs或航道来计划路线 -点击调整ATIS的频率 -对话框可以移动、调整大小和跳出 -信息历史可以滚动显示 -可在VR中使用 -选择是否只看自己的信息或其他飞机的信息
与X-Plane 11相比,ATC对话框以及与管制员互动的方式已经完全改变。 新的对话框既包含了进行无线电呼叫的控制,也包含了可以滚动的信息记录。 与所有其他窗口一样,它可以被调整大小、拖动和 “弹出”,成为一个正常的操作系统窗口, 例如,你可以把它放在第二个显示器上。 你可以使用水平分隔器调整窗口内的消息记录和命令区域的大小, 以适应你的偏好,而且该对话框还可以使用控制器在VR中完全使用。

你可以选择在你收到信息时自动打开这个对话框,如果你不与它互动,过一会儿又自动隐藏起来。 如果你手动打开它,它也会部分隐藏自己,只留下半透明的消息记录。 这样你就可以把它留在屏幕上看信息记录,而不挡住你的视线。 你也可以选择过滤掉与其他飞机的通话,当然你还是会在无线电上听到它们。

可用的命令已经从固定顺序的几个特定任务选项变成了一个动态的、有优先权的、上下文敏感的菜单系统。 只显示你在任何时候都可以进行的呼叫,一般来说,最相关或最可能的呼叫在列表的顶部。 这希望能使不熟悉ATC的人更容易进入并尝试一些东西。
有些命令有多个选项,例如要求VFR起飞类型或要求改变高度。 当你选择了其中一个,一组新的选项将被显示出来,给出命令的下一个阶段。 命令可能有几个阶段。当你给出所有需要的选项时,完整的无线电信息就会被传送。 有时选项会发生变化,例如,当向区域控制员请求在附近的机场降落时。 同样,只有相关和有效的选项会被显示出来。 如果你需要在多个阶段建立一个命令,产生的命令会在对话框中的选项按钮上方完整显示。

新的一键通模式允许你使用ATC对话,而无需将手从控制器上移开。 如果你在 “操纵杆 “设置页面中为PTT指定一个控制器按钮–通常是触发器或一个专门的 “发射 “按钮,这将改变无线电信息菜单系统的工作方式。
当你按住发射按钮时,如果需要的话,ATC对话框会自己显示出来, 你将能够使用控制器的帽子开关来浏览无线电选项,这通常会控制视图方向。 当你释放PTT按钮时,信息就会被传送。 与真正的飞机不同的是,你可以在另一个电台发送时按住发送按钮,没有任何问题,所以你可以开始建立命令,即使电台很忙。
在ATC对话框的第二个标签上,你可以看到附近的管制员和ATIS的传输列表。 你可以通过点击这些列表中的一个来直接调谐你的无线电台; 如果一个控制器可以运行,它将被设置在COM1上,否则就是COM2,ATIS发射机将被调谐在COM2的待机频率上。 ATIS在NAV频率上将设置NAV1。 这个选项卡也有启用自动调谐和自动回读的控制。 自动回读是一个简单的快捷方式,每一条需要你回读确认的ATC信息都会自动处理。 通常情况下,你需要明确使用 “回读 “命令。
-
X-Plane 12.00 Beta3
X-Plane 12.00 Release Notes Beta_3 修改了20多个bug的X-Plane 12.00 Beta3推出,马上升级。

接下来测试一下,从Mammoth Yosemite Airport(KMMH)起飞, 在Yosemite上空用Cirrus SR22试飞了大约一个小时,运行都很稳定,没出任何问题。




 安全降落回到Mammoth Yosemite Airport机场。
安全降落回到Mammoth Yosemite Airport机场。
话说X-Plane 12的ATC功能比以前方便了不少, 可以随时与空管通信,请求VFR降落,各种预设多了很多,很是推荐。


最后再放几张最近在空中游览的拷屏景色吧。 北京首都国际机场
 旧金山
旧金山
 拉斯维加斯
拉斯维加斯
 希思罗机场
希思罗机场
 伦敦
伦敦

关于机器性能,打开MacOS上的Activity Monitor观察,
 可以看到GPU的16核全开,性能达到极限;
CPU只用到10核里的4核,而且使用率还不到50%;
另外内存也是很有富余。
看起来必须给xp12配备强大的GPU才能够得到完美的显示效果。
可以看到GPU的16核全开,性能达到极限;
CPU只用到10核里的4核,而且使用率还不到50%;
另外内存也是很有富余。
看起来必须给xp12配备强大的GPU才能够得到完美的显示效果。 -
入手x-plane12第一印象
苦等近一年,今天一大早发现x-plane12的Early Access版本已经发布,马上购买并安装, X-Plane 12.00 Release Notes
 下载地景大概花了2个多小时吧,终于安装完毕。
启动画面
下载地景大概花了2个多小时吧,终于安装完毕。
启动画面

主菜单页面

发现各种设置页面和X-Plane11没什么区别,这样上手也快


 也不用专门介绍设置方法了。
也不用专门介绍设置方法了。开Cirrus SR22在东京羽田机场转一转




 感觉飞行很是流畅,比X-Plane11好像更轻快一些,桢频在20左右。
话说使用机器OS为macOS Monterey,
硬件配置并不很高,内存16GB, CPU为10Core, GPU为16Core, 固态硬盘1T。
另外显示器31.5寸,分辨率3072 × 1728。
感觉飞行很是流畅,比X-Plane11好像更轻快一些,桢频在20左右。
话说使用机器OS为macOS Monterey,
硬件配置并不很高,内存16GB, CPU为10Core, GPU为16Core, 固态硬盘1T。
另外显示器31.5寸,分辨率3072 × 1728。

 云的描绘更有真实感,很有些印象派油画风格,这可是x-plane12的一大改进之一。
云的描绘更有真实感,很有些印象派油画风格,这可是x-plane12的一大改进之一。
接下来再飞一个成田机场的降落,系统仍然很轻快,并且运行稳定,没有什么bug出现。




话说这个版本起F-14战斗机成为标配,马上飞起玩玩,爱不释手啊。







x-plane12上手第一印象很是满意,于是马上记录下来分享给大家。
-
X-Plane 12 Flight Model Report
X-Plane 12 Flight Model Report 开发商在blog上公布了关于X-Plane12的详细技术说明, 但是它实在实在太长了,我也就不翻译全文了。。。
大家有时间的话去读一读,章节如下: 目录 1 简介 2 云 3 真实的天气 4 热空气 5 微爆 6 机翼 7 襟翼 8 机身 9 调节器 10 直升机 11 水上飞机 12 齿轮和轮胎 13 刹车系统 14 结冰 14.1 数学:冰的作用 14.2 将数学应用于N844X,我的兰考进化论 14.3 关于飞行员在结冰情况下可能思考的一般案例讨论 14.4 假设在某一天,N844X,我的兰考飞机的演变中可能出现的情况 15 喷气发动机 16 重量和平衡 17 空中客车的飞行控制规律 18 结论
简介
X-Plane 12是一个有趣的版本,因为我们不得不重写……一切。
事情是这样的。
Ben开始追踪来自太阳的每米瓦特和类似的东西,并将其添加到飞机所使用的任何金属的材料属性中,接下来你就会知道我们的照明是基于物理学原理的!"。好吧,好吧。这听起来是一个有趣的功能,但我们一做,就突然发现了一些问题。与出色的新飞机照明相比,机场的路面看起来不再是正确的了。与飞机上基于物理学的照明相比,它看起来很逊色。所以我们不得不更新我们的路面。但是,与晴天相比,下雨的时候看起来就不对了。突然间,在所有这些精确的照明下,当下雨的时候,只有平坦的彩色路面看起来是不对的。所以我们需要水坑。但水在寒冷的时候看起来很不对劲,所以我们必须要有冰。但当其他地方有雪的时候,这看起来就不对了。我们必须在人行道上有成片的雪,但如果我们只有白色的、蓬松的、刚落下的雪,看起来就不对了,因为我们都知道任何机场坡道上的雪很快就会被扫掉,剩下的就会被堆起来。一旦我们有了所有的雪堆和轮胎刮过的冰和水坑,艺术家们就开始带着他们的下一代地面车辆出现了,其艺术性是如此的不可思议,以至于你觉得你在看一辆真正的推车……直到推车没有停顿片刻来安装牵引杆,这才打破了这种错觉!所以现在地面服务车必须要有足够的时间来安装。因此,现在的地面服务车必须更真实地移动! 并且在工作之间停止。等等,等等。对于每一个。单一。模拟器的每一点。
你看这是怎么回事。每次我们做对的事情,都会使模拟中的其他东西看起来不对。
因此,我们就必须解决这个问题。
这将使下一件事像一个大拇指一样突出。
这种情况已经持续了5年之久。
当我们完成的时候,我们已经重新编写了模拟的每一个部分。同时确保V11的飞机、风景和插件仍能正常工作。要想知道有多少工作涉及,请看这份文件。这仅仅是飞行模型的主要亮点,几乎完全由我来编码……是我们20人左右的团队为X-Plane 12所做的全部工作的一小部分
这就是X-Plane 12的情况,以及为什么它花了这么长时间才推出。
但是,这样做的好处是,我们已经大修了……所有的东西。
模拟中的一切都被提升到了基于物理学的水平,不仅仅是飞行模型。
但飞行模型是我在本文件中要谈的全部内容,因为这是我做的部分。
-
X-Plane 12 Development Update
X-Plane 12 Development Update - May 19, 2022
从去年9月X-Plane 12发表已经过了大半年,终于等到官方更新。 貌似很快(6月中?)Early Access release就会发布,定价仍然是$59.99, 这样玩家就可以在线购买了。
下面翻译一下各功能模块的进度:
–飞行动力模型 -最终测试中 -奥斯汀现在正在写一篇博文,概述为X-Plane 12所做的改变。
–全球地景 -已完成 机场和全局地景的雨/雪着色器 -正在进行中 完成数据导入/完成场景拼块的生成 提高三维树木的性能 调整海岸线/海滩嵌入新的地景拼块 船只/水上飞机的三维尾流绘制 完整的正射影像兼容性 -TODO 完成实现地理感知的水面颜色。


–机场特色 -已完成 完全动画化的滑行路线。 为Gateway开发者提供的模块化塔楼建筑套件。 新的地面车辆,更新了驾驶逻辑。 地面车辆的FMOD声音。 几十种新的静态飞机+新的基于航空公司/机场的涂装选择逻辑。 -正在进行中 新的客运巴士。

–机体 -已完成 SR22 R22 奖状X RV-10 PA-18 -正在进行中 A330 虽然这架飞机已经准备好初步发布,但还有一些额外的功能,我们仍在努力,特别是一个定制的空客FMS。 F-14 -TODO 完成涂装并最终确定自动驾驶行为/座舱细节。


–天气引擎 -大体完成 包括真实天气的新鲜数据源、新的逻辑、新的雨/雪积聚/风挡玻璃效果、新的体积三维云等。 -TODO 修复体积云系统中的一些错误。 确保联网的模拟器之间天气的连续性。 性能调整 第三方API

–ATC -已完成 更新的用户界面 支持VR/无鼠标 VFR操作(测试中) -TODO 最终审查
-
X-Plane 12 Keynote Presentation + Q&A
X-Plane 12 Keynote Presentation + Q&A
x-plane.com官网上公布了X-Plane 12的具体介绍,下面试着翻译一下Q&A。
问:关于向后兼容性,在X-Plane 11中使用的软件会怎么样?能在X-Plane 12中工作吗?
答:我们已经确保现有的OpenGL桥能继续按照插件原有方式在v12中工作。 我们希望大多数表现良好的插件能够继续按照它们在v11中的方式工作,这包括从第三方场景和飞机到一般插件,包括现有的卫星照片地景"。
问:X-Plane 12已经完成了吗? 答:没有! 我们的团队仍在努力工作,以整合功能,解决错误,等等。这个主题演讲是为了让大家提前了解我们正在开发的功能。
问:关于天气系统,你们是否有任何系统,它可以俯瞰山脉,风并与它们互动? 答:实际上我们已经有很多年了……
问:我拥有X-Plane 11。升级的过程是怎样的? 答:X-Plane的新版本总是要付费升级的,因为它们代表了我们开发团队过去多年的工作和未来更新的后续工作。 一旦你购买了X-Plane 12,你将在获得免费的更新,就像我们对v11、X-Plane 11.30、11.50等所做的那样。
问:X-Plane 12的帧率/性能与X-Plane 11相比如何?我需要什么样的电脑? 答:我们预计X-Plane 12将需要比X-Plane 11更多的GPU能力,但没有人需要对一些转移到GPU上的新功能感到恐慌–GPU在这些方面确实很出色。 硬件还没有要求,现在说有什么要求还为时过早,没有信心。
问:对于新的默认地面滑行航线,是否支持两条宽体飞机路线? 答:场景可以(而且已经)显示多个停靠位置的喷气客机,但最初只有一个飞机会被自动进站。系统本身的架构允许在未来显示多个同时停靠飞机。
问:是否会支持不同颜色的跑道标记?例如,在北极环境中用橙色标记代替白色或黄色标记? 答:是的,新的apt.dat规格确实包括这个。我们在WED中也有这个功能,而且我们也有着色器来实现这个功能。
问:我们什么时候可以试用X-Plane 12? 答:我们的第一个里程碑是让X-Plane 12准备好为第三方开发者提供私人测试版。 之后我们将提供一个公开的早期访问版本让社区将首先能够接触到V12。 在Early Access期间购买X-Plane 12的人也将获得X-Plane 11的使用权。
问:关于新的云系统,是否会有对不同类型的云的支持? 答:是的。在新的云系统中,云的类型和云的覆盖范围是分开的。 云可以是卷云、层云、积云或积雨云,引擎支持不同类型之间的混合,例如,积雨云可以随着时间的推移演变成积雨云。 云的类型控制着云的视觉属性,并可用于飞行模型。 覆盖范围是独立的,所以一个多云天空可能是一个层状云或积云层。 云的高度也是独立的,所以 “高耸的 “积雨云就是你让云变得非常高的情况”。
问:当涉及到高度或速度时,你们在飞行包线方面是否有任何限制?或者只要有足够的空气或发动机动力,你就可以飞到任何高度? 答:我(Austin)不可能将任何先入为主的飞行包线概念应用于任何飞机,从来没有。 在第10版中,我们可以驾驶航天飞机从脱轨燃烧。 任何人为的限制显然都是与X-Plane的设计宗旨相违背的。物理学明确规定了飞机在每一时刻的加速度……而加速度与速度和速度与位置的关系是一体化的,没有任何人为的限制。
问:X-Plane 12的场景开发人员会有网格编辑工具吗? 答:没有。
问:关于天气系统,我以前曾将机翼伸入云层,此时会在一个机翼上得到湍流,但另一个机翼却没有。这是不是云和渲染系统与物理引擎有某种联系? 答:我(Austin)已经为X-Plane 12开发了所有的云计算,其分辨率为1公里,然后Ben用比这更高的细节来渲染。 接下来,Ben将更高精确度的数据传回给我,以便应用到飞行模型中。 我不保证我可以把精度降到低于飞机翼展的程度,但它将足够接近云中的湍流、云中的结冰、云中和云下的雨,以及类似的东西。
问:你们在VR整合方面有什么改进计划吗,特别是在用户界面方面? 答:在最初的版本中没有。我们有一堆关于VR的功能要求,包括对OpenXR的支持和对插件更好的整合,我们会在发布后研究。
-
X-Plane12发表
好消息:在今天的FlightSimExpo上X-Plane 12被正式发表! 看了近一个小时的YouTube直播,然后凭记忆写一个简单的memo。

-F-14雄猫战斗机成为缺省配备机型 <img src=https://pbs.twimg.com/media/FAKPnuwWUAA0mbr?format=jpg&name=4096x4096> -天气不只是利用机场局部的metar,而将建立一个全局的天气系统 -云的render引擎重写,不会占用太多的系统资源 -雨的描画模型更加真实,而且会和气流模型结合,比如打在驾驶窗的水流的变化 -声音引擎也重写,具备更加临场模式的声音系统 -ATC的新UI也重写,更增加了对VFR ATC的支持 -季节的变化,这在关于新一代X-Plane也提到过 <img src=https://pbs.twimg.com/media/FAKZ1hHVEAQaAXn?format=jpg&name=large> -发表时期还未定 -购买X-Plane12beta数字版的用户可以同时下载X-Plane11
参考从X-Plane11的发布到测试版公开花了约半年时间,所以估计明年春天就可以用上X-Plane12了吧。
-
关于新一代X-Plane
本站已经很久没有写关于X-Plane版本更新的内容了。 不过今天看到New Previews of the Next-Generation of X-Plane,有不少关于开发中的新一代X-Plane的介绍,于是抄录一下。

关于新版本号会不会是X-Plane 12,价格是多少,现在还未定。 关于季节,不仅仅四季的变化, 时刻的不同,纬度的不同,季节的景色变化都会不一样。 关于云, 打算推出形状和体积都会不断变化的功能。 关于微软模拟飞行, Austin说他只使用过30分钟而已。在飞行高度3000英尺以上时确实景色非常好,但一旦接近地面,图像质量急剧下降。 X-Plane也不打算提供卫星拍摄的地表照片数据功能。 关于性能,会尽量发挥硬件的效能,但不会把精力全部投入到如何提高帧频上。
机场


Autogen地景



塔台


船体


X-Plane: Past, Present, and Future
X-Plane Next Generation Forestry Preview