练习手记
-
使用OverlayEditor做标示 练习起落航线
OverlayEditor是一个免费的x-plane附件工具,可以用来制作地景插件, 你可以使用它在地图上放置各种建筑物,像是建筑工人一样建设自己专用的机场等地景。
这里我不打算介绍如何制作精美的插件,而是从练习五边飞行,即练习起落航线的观点, 介绍一下如何利用OverlayEditor来帮助自己提高飞行技术。
首先为没有OverlayEditor使用经验的朋友简单说明OverlayEditor的安装和使用。 我还是以Mac OS上的安装为例子,Windows上的方法应该是大同小异的。
软件的下载可以在x-plane.org里找到,下载后就可以直接得到执行文件OverlayEditor.app。 但是因为OverlayEditor需要使用wxPython的程序库, 所以还得从www.wxpython.org的这里下载, 对于Mac来说,我使用的是wxPython3.0-osx-cocoa-py2.7, 下载完后得到wxPython3.0-osx-3.0.0.0-cocoa-py2.7.dmg压缩包。 解压之后又会得到wxPython3.0-osx-cocoa-py2.7.pkg安装包,双击即可启动安装程序。 对于MacOS 10.8以后的新版OS,还要注意的是 系统设定System Preferences → Security & Privacy 里面如果不允许一般下载软件运行的话,你还要把设定改变一下才能正常安装。
好了,OverlayEditor可以用了, 首先指定需要机场,在这里选择ZBAA,北京首都国际机场,
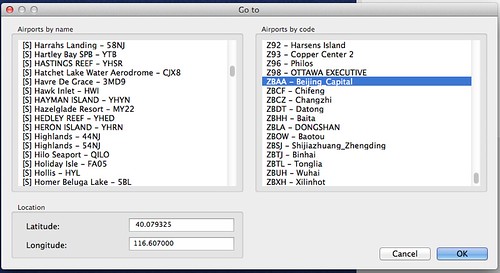 接下来选择修改的地景包,如果做一个新的地景也可以,这里为了方便,就打开一个现有的。
接下来选择修改的地景包,如果做一个新的地景也可以,这里为了方便,就打开一个现有的。
然后就是在地图上放置3D构件了,因为目的是为了练习起落航线, 而x-plane本身的地景主要是平面的,即使是采用了卫星照片的地景插件立体感仍然很差, 所以考虑在机场外5边的各个转弯位置上放置比较明显的标志性建筑。 这里我选择了一个高100米的电视天线塔,
 一共设置了4个到机场的四周,这样每一边转弯的时候,参考天线塔为参照物,
一共设置了4个到机场的四周,这样每一边转弯的时候,参考天线塔为参照物,

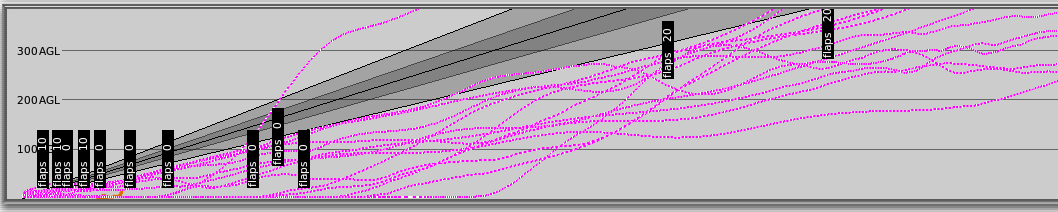
 飞出来的航迹每次都非常笔直和重叠,不会像没有参照物时弯弯曲曲,参差不齐的了。
飞出来的航迹每次都非常笔直和重叠,不会像没有参照物时弯弯曲曲,参差不齐的了。

完
-
爬升下降和水平飞行的练习
又去外地出差了一周,本着不能让博客荒废的精神,简单更新一次吧。
昨天回家后玩了会儿x-plane消遣消遣,重点练了下爬升和下降时的垂直速度。 比如在把垂直速度维持在1000英尺/分上,并在改变姿态时注意轻柔地拉推杆的两点。
在爬升和下降时,先调整好俯仰姿态,然后加大或减少发动机推力, 当垂直方向速度逐渐稳定在1000英尺/分左右后,用配平作些微调即可。 看到基本不用推拉杆,飞机就能稳稳地维持在这个速度上时,很有成就感啊。
改平时的操作基本上也是一样的,按顺序推杆或者拉杆调整俯仰角, 然后调整推力,当垂直方向速度逐渐稳定在0英尺/分后,稍作配平即可。
虽然说起来很简单,但实际操作时让飞机姿态安定下来并不是一件容易的事, 一段时间不练习后手会变生,还是需要经常复习的。
完
-
复习一下仪表着陆系统ILS降落
一周基本上没碰x-plane,好不容易等到周末,终于可以玩会儿了。 练点什么好呢?想起来好久没练ILS了,那么就小小的复习一下。
一如既往的飞塞苏纳172,从成田机场16L起飞。 看了下天气,在3000和8000英尺有云层, 于是就一直沿跑道方向直线上升到13000英尺, 飞过千叶县著名的九十九里海滨之后,向西Arlon标识点飞去。
这个Arlon是羽田机场34R跑道标准进场程序的标识点waypoint, 如果实际听空中管制通话的话就可以知道在刮北风的季节里,空管们总是会不断地把各个航班引向这个点, 该处设定的飞行高度为4000英尺。

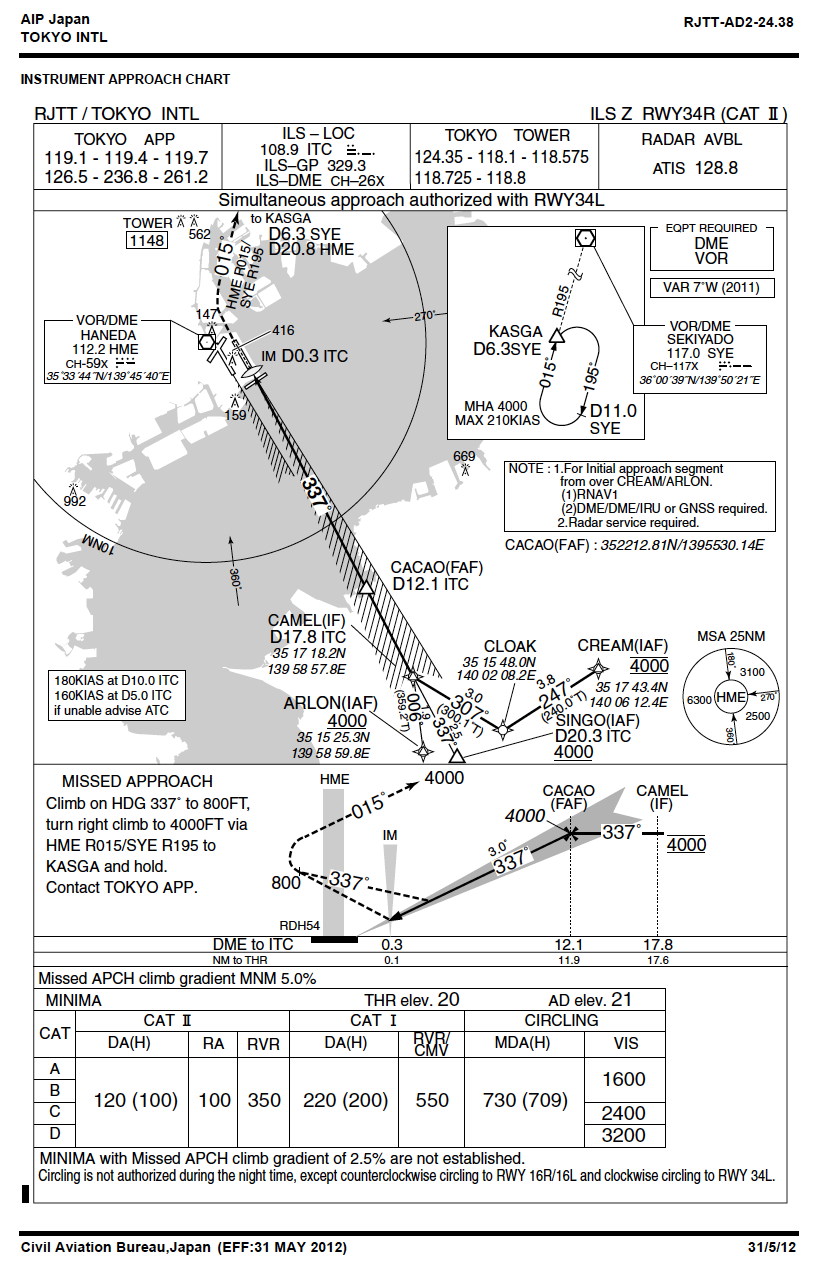
查了下日本的航空资料汇编AIP资料,ILS Zulu Rwy34R的进近图如下所示,
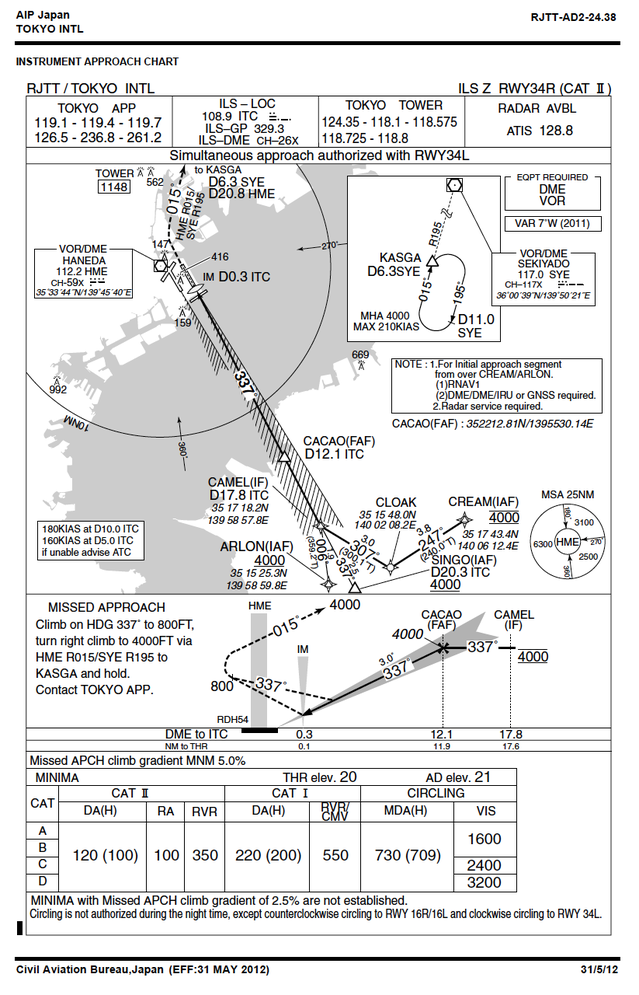 果然Arlon是ILS仪表进近程序的IAF(始进近点,Initial Approach Fix),高度为4000英尺。
果然Arlon是ILS仪表进近程序的IAF(始进近点,Initial Approach Fix),高度为4000英尺。再看了下羽田的天气,嗯,风向140??
 降34跑道岂不成了顺风?
嗯,不管了,再换路线绕道东京湾去麻烦了,好在风速不大,问题不大。
根据上图或者进近图可以知道ILS无线电导航台的频率为108.9MHz,因此把NAV1的频率设到108.9,不断降低高度是达到ARLON时把高度降至4000英尺。
降34跑道岂不成了顺风?
嗯,不管了,再换路线绕道东京湾去麻烦了,好在风速不大,问题不大。
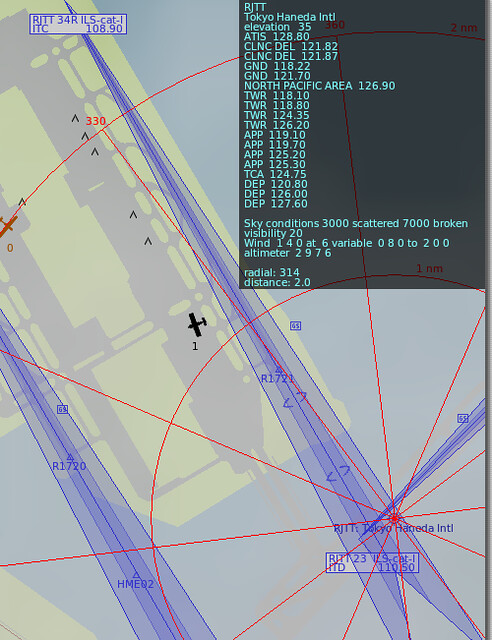
根据上图或者进近图可以知道ILS无线电导航台的频率为108.9MHz,因此把NAV1的频率设到108.9,不断降低高度是达到ARLON时把高度降至4000英尺。到了Arlon转向340度方位以后,可以看到此时正好对着羽田机场的跑道。
 柔和调整YOKE并减油门,努力把下滑坡度指示器(ILS Glide Slope Indicator)中垂直和水品指针对准中间,
飞机逐渐平稳的下降,渐渐接近跑道,
可以看到远处东京市内的高楼大厦越来越近,
柔和调整YOKE并减油门,努力把下滑坡度指示器(ILS Glide Slope Indicator)中垂直和水品指针对准中间,
飞机逐渐平稳的下降,渐渐接近跑道,
可以看到远处东京市内的高楼大厦越来越近,
 最终平稳落地,
最终平稳落地,
 一般般,这次降落自我评价的话算70分吧。
一般般,这次降落自我评价的话算70分吧。完
-
关于ATIS 自动终端情报服务
先抄一下wikipedia上的介绍:
“自动终端情报服务 (Automatic Terminal Information System, 简称ATIS或情报通播) 是在繁忙的机场自动连续播放的信息服务, 通常在一个单独的无线电频率上进行广播, 包括主要的与飞行相关的信息,如天气、可用跑道、气压及高度表拨正值等信息。 飞行员通常在和管制员等单位建立联系前收听通播,了解相关情况以减少管制员的工作量及避免频道拥挤。 正常情况下通播每小时更新一次,天气变化迅速时也可随时更新,依次以字母代码 A, B, C…Z 表示,按照ICAO公布的标准字母解释法判读。”
对于飞行模拟来说,X-Plane可以实时的从网上下载最新的全世界气象信息, 并根据这个信息模拟风向风速云况,让玩家能更真实的感到模拟飞行的乐趣。
但是玩了以后,总觉得软件里的ATIS信息跟现实中的不太一样, 于是自己查了一下,写个学习总结。
首先用自己的艾可幕便携式无线电接收机ICOM IC-R6听了下羽田机场的ATIS广播,
 然后录下音,听了N遍后终于给记下来了。
rjtt_atis.m4a
然后录下音,听了N遍后终于给记下来了。
rjtt_atis.m4a“Tokyo International Airport,information Kilo,2130, ILS Zulu Runway 34L approach, Landing Runway 34L, Departure Runway 05 and 34R, Departure Frequency, 126.0 Runway05, 123.8 Runway34R Wind 180 degrees 6 knots, Direction variable between 160 and 230 degree, Visibility 9 km, Few 1 thousand 5 hundred cumulus,Bkn 14 thousands altocumulus Temperature 20, dewpoint 15 QNH 29.80 inches Advise you have information Kilo”
-
训练日记:火奴鲁鲁机场的tracffic pattern
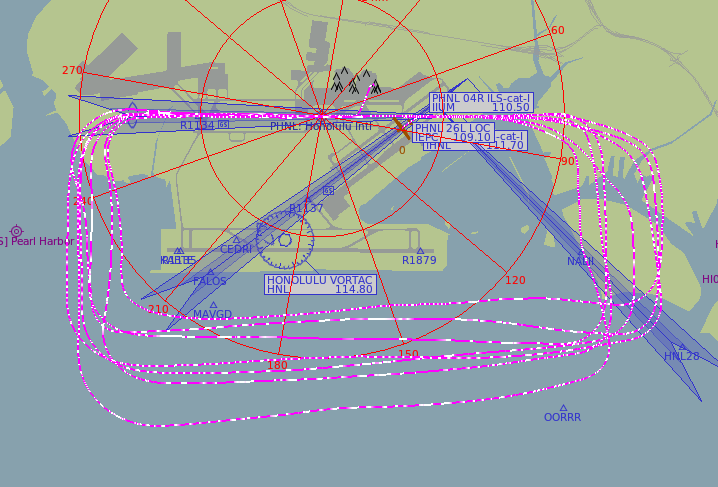
一直把家附近的RJTA当作自己的主场,练习都选在这里进行。 不过这几天风大,很不适合训练,于是把场地就换到自己曾经亲自驾驶过的夏威夷火奴鲁鲁机场来了。
刚到时还不太适应场地,随便选定26L跑道,先飞了一个小时的touch and go, 轨迹当然是歪歪扭扭,
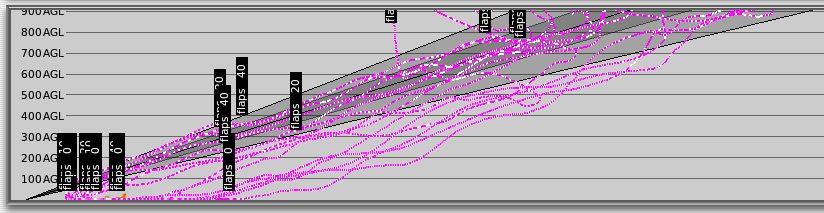
 高度控制也是忽高忽低,
高度控制也是忽高忽低,
 用了一个小时终于把地形熟悉好,五边的控制也逐渐得心应手,最后的降落还算满意,full stop以后以Aloha塔台为背景拍张照片,纪念一下。
用了一个小时终于把地形熟悉好,五边的控制也逐渐得心应手,最后的降落还算满意,full stop以后以Aloha塔台为背景拍张照片,纪念一下。

晚上吃完饭后又飞了一个小时,巩固一下练习成果,除了最后进入final的时机还有些早,高度下降得又是比较早以外,大部分的降落都还算满意。 好不容易去趟夏威夷,连旁边近在咫尺的珍珠港也没去,专心练习,精神可佳,于是留下以下拷屏做为纪念。
-thumb-600x406.png)
-thumb-600x155.png)
完
-
训练日记:飞行的基本操作练习
水平飞行 level flight, 爬升, 下降descent的基本操作之个人总结,怕今后忘了先写下再说。
为了维持稳定的水平或者爬升与下降时,一定要先调整动力,然后控制机头的姿态pitch,最后是调整配平。
第一步的动力调节之所以重要,是因为发动机推力决定了飞机上升和下降状态。 一般人印象中,飞行员拉杆使飞机上升,推杆使飞机下降,实际上这是错误的概念。 拉杆实际上确实能使飞机上升一段高度,但同时在推力不变的情况下,空速会不断减少最终使飞机进入失速。 同样如果想用推杆使飞机下降,飞机不断低头而使空速会不断增加,这将会提高飞机的升力,使高度反而升高。 所以一定要记住,为了维持一个稳定的高度调整过程,一定要调整动力。 从爬升进入平飞状态(level-off)时,首先要适当降低发动机推力;从平飞进入爬升时要提升推力;从平飞进入下降时要降低推力。
第二步调整姿态角pitch的目的既然不是高度,那是什么呢?是为了调整空速。 推杆后,飞机会低头增速;拉杆后,飞机会抬头减速。 注意这里的速度的增减是有一定范围的,如果想要大幅增速,毕竟还是需要增加发动力推力的。
第三步的配平,主要是为了减少拉杆推杆的力量,所以当动力和姿态基本稳定后,也就是高度和速度稳定以后, 适当调整配平器让飞行员不用老用力推拉着杆,减轻驾驶压力。 这里要注意的是配平毕竟是个辅助的操作,高度速度调节主要还要靠动力和姿态角,不要过度对配平进行操作。
实际操作练习 假设你正处于95节的平飞状态,动力为2200rpm,高度2000英尺,现在准备上升3000英尺。 塞斯纳172的最佳上升率时的速度为75节,所以你先降低空速,拉杆抬头。 当速度接近75节,把油门加大到2400rpm,高度不断升高。同时为了维持速度的稳定,需要微微调整pitch。速度稳定后配平使加在操纵杆上的力量为零。 这样就进入稳定的上升阶段了。
当高度接近到3000英尺,一般来说当上升率为1000英尺/分时,取该数值的10分之一,即距离目标高速100英尺的2900英尺处压杆,控制飞机姿态恢复到水平,同时飞机会加速,当恢复到平飞的90节左右时,降低油门到2200rpm。 到达3000英尺处,逐渐调整pitch,使速度稳定在95节左右。 高度和速度都稳定下来后,最后进行配平。 如此进入了3000英尺稳定平飞状态。
从3000英尺平飞,动力2200rpm,空速95节的状态下降到2000英尺时, 首先减油门至1800rpm,拉杆,调整速度至85节左右。然后配平。速度稳定后即进入了稳定的下降阶段。 到达2100英尺处,加油门至2200rpm,压杆控制飞机姿态恢复到水平。 高度到2000英尺,控制速度维持至95节,并配平。 这时就又恢复到了2000英尺的稳定平飞状态了。
完
-
训练日记:事隔两周后的练习 traffic pattern 与 touch and go
由于出差的缘故,有两个星期没有练习X-Plane,怕手生了赶紧利用周末复习一下。 今天主要还是重复做touch and go,围着机场一圈又一圈。
看轨迹图觉得还是base leg问题最大,速度有些过快,进入final approach的时机比较晚,另外机头总还是对不准跑道。
自己的traffic pattern的操作一般如下:
departure leg: 55节抬前轮,爬升空速80节~90节,至300英尺处减油门至2000rpm,500英尺处转弯 这个阶段感觉2点操作比较重要,一个是脚舵,在跑道taxi和刚刚腾空时总感觉飞机会向左偏(应该是P-Factor效应吧,这里有篇文章就讲这个的),所以要 注意观察turn coordinator倾斜转弯指示器的小球,用脚舵把它控制在中央位置;另一个是一般刚起飞后机头总有向上抬的倾向,可以适度压机头使爬升角度不过太大。
crosswind leg: 保持爬升空速80~90节,至900英尺处转弯 这个阶段也要注意爬升角度不至过大,尽量是crosswind这一边稍微长一些,便于base leg时有更多的时间进行调整
downwind leg: 收油门到1800rpm,1000英尺处改平,巡航速度90节。 正切到跑道头时收油门至1500rpm使飞机下降高度到800英尺,抬pitch减空速至80节。 这个时候比较困难的是为了减速抬机头时,飞机的下降率也随之上升,所以达到800英尺高度时总是花时间比较长,心里着急。所以这几个操作还是要多练习。 跑道头于机翼成45度时应该进入base leg,但是因为自己为调整高度花的时间长,大概转弯时的角度好几次都不到30度了吧。
base leg: 收油门至1400rpm,抬机头使空速降到70节,放下襟翼10度。500英尺处开始转弯。 这个阶段的问题也还是速度的控制还不够自如,花时间一长,就飞过了跑道,所以看上图就知道,有几次在五边处飞了个S形,轨迹很槽糕。
final approach: 收油门至1300rpm,空速65节,如果速度过高可以放襟翼20度,但速度控制的没问题时不继续放襟翼貌似也没问题。到跑道头收油门,脚舵控制朝向跑道中间线,平漂落地等等。 这个阶段的问题还是对不准跑道头,姿态总有些侧风着陆时的感觉,怪怪的。另外就是高度有时候降的过低,接近跑道时不得不加大油门以维持高度。四边五边时的维持一个坡度更小更平稳的下降率是今后的重要课题。
完
-
训练日记:维持速度高度的困难
继续在塞苏纳172上练习touch and go和steep turn, steep turn比以前高度和坡度的维持要好一些了, 看local map上画出的接近8字的航迹还是有一些达成感的。 以往驾驶时把注意力主要集中在高度和坡度上,经过几天练习后有些进步,但一直却没有太在意速度稳定性的问题。 今天飞行时更加注意观察了下速度计,发现速度变化还是挺大,从80到100节之间很不稳定,这可还不行, 今后还是要注意把速度变化维持在10节之中多练习。
touch and go的问题还是在base leg以后下降率过大,以致高度下降过快, 注意以后虽然有些改善,但还是不够理想,这个课题还是要花时间慢慢解决。
-
训练日记:touch and go
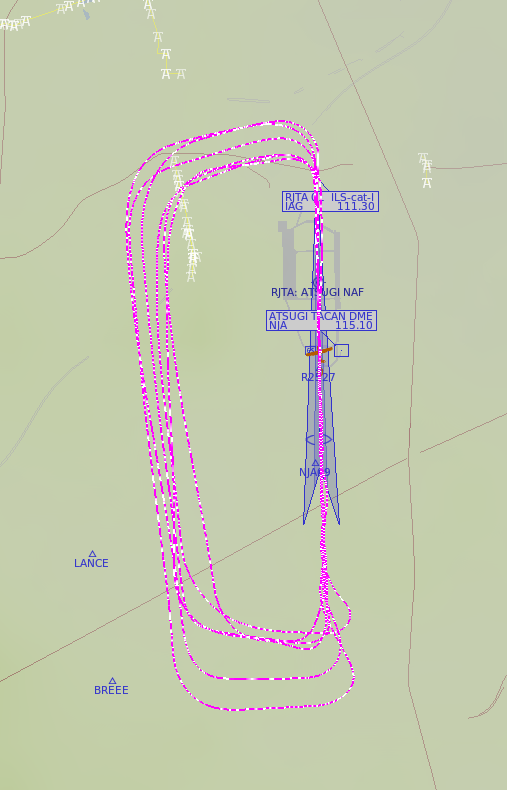
今天周六,终于有时间尽情练习了,于是把机场地点选在家附近的rjta, 也不管atc了,起飞以后直接飞5边起落航线,然后touch and go, 一圈接一圈,大概飞了15个吧,这才full stop。
今天的收获是要注意观察地面标志,何时进crossswind leg,何时进downwind leg, 何时进base leg,一开始时自己总以跑道为参照物,所以不得不不断的切换视角,极其繁琐。 后来就找地面上的一些标志性目标,比如高楼,高速公路,或者类似公园一样的大块绿地等等, 以这些做参照的话,转弯时就可以集中精力操纵飞机,而不用总看跑道的位置。
实际飞行后看看local map,参照地面目标以后飞机的航迹很明显跟以前不一样, 以前的总是歪歪扭扭的不正规的4边形,后来的就基本接近4边型了,虽然四个角还不全是90度, 但已经改善不少了。
看起来今后还得要多练习呀。
-
练习大坡度转弯steep turn的心得
这两天在练习大坡度转弯steep turn。 前几天看一些在美国学飞行驾照的人的博客,一般在一两次飞行之后就要练习这个项目, 而且一般人开始时要想维持一定的高度同时保住45度坡度很困难。
为了试试在X-Plane上自己能否做到,所以也飞了几次,果然高度控制的很差,一下跌下500英尺。。。
于是查查资料学习看,比如这本 Rod Machado的地面飞行学校.pdf 里面的第九课就写到:
" 大坡度转弯是迈向进阶飞行的踏板,常常练习,你将发现自己在飞行控制方面愈渐纯熟。。。
你可以在飞机急转弯时,要籍着外面的视觉线索做判别依据。。。
在飞行模拟时,飞机滚转进入45度坡度转弯时,需要逐渐加大俯仰角度,直到成为6度机鼻向上姿态为止。接着应该监看高度表来决定哪一类的小俯仰修正是维持现有高度所需要的。 诀窍无他,就是进行小规模的修正,眼睛盯着高度表别让飞机往下掉就是了。
在必要时以副翼的压力来抵消加大坡度的力量。在摇杆上施力以维持高度时,可能需要以摇杆朝向反方向移动副翼,以防坡度过倾。
配平是控制飞机维持在某个飞行阶段一段较长时间时才需要,大坡度转弯瞬息万变,通常不需要配平飞机。 你必须籍着施加在摇杆上的后拉力量,来警告你飞机在高空速时接近失速的状态。这也是我们在大坡度转弯中不配平的原因。
维持高度变动在100英尺范围内,空速改变不超过10节,转弯后偏离方向不超过10度。 "
继续练习了几次,感觉不关于关注仪表,更把注意力放到大地和驾驶舱的角度上还是很重要的。 尤其是记住45度时地平线和飞机操作面板的位置和角度的关系,然后在飞机偏离这个位置以后,不断拉或者推杆把它校正,或者在坡度过大时向反方向轻轻横滚一下是角度回复,使用这个技巧现在高度的变动基本可以控制在100英尺左右了吧。
另外下面youtube的视频也可以值得参考一下。