客机驾驶探秘
-
客机驾驶探秘4.6 关于燃油消耗和重心
前面介绍了在自动导航模式下,飞机回自动沿着事先设定好的线路飞行, 但是飞行员也不能闲着,他们要不断监视飞行仪表,还要在每经过一个航路点之后,记录下通过时间和所剩燃油量。
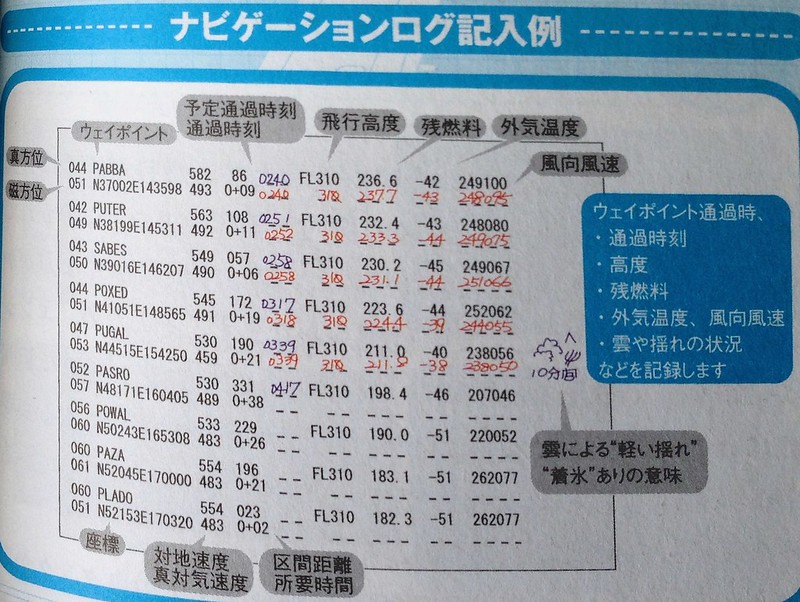 上面是一个飞行日志的例子,可以看到对于每一个航路点,飞行员都记录下了通过时刻,飞行高度,所剩燃油,外部温度以及风向风速的信息。在第五行里,还记下来路程中发生了10分钟轻度颠簸的信息。
上面是一个飞行日志的例子,可以看到对于每一个航路点,飞行员都记录下了通过时刻,飞行高度,所剩燃油,外部温度以及风向风速的信息。在第五行里,还记下来路程中发生了10分钟轻度颠簸的信息。
在本系列1.3 飞行准备会中曾经介绍过详细的飞行计划。该计划是根据下面信息计算出来的: 飞机的重量(旅客的预约人数可以计算出) 飞行距离 飞行速度 高空的风向风速预测值 高空温度
其中高空风和温度预告信息由世界区域预报中心WAFC(World Area Forecast Center)可以获得。 世界区域预报系统是在国际民用航空组织架构下,世界区域预报系统 (WAFS) 为各气象部门及认可用户提供国际航空所需的航空气象资料,包括文字形式的飞行气象情报和天气图等。分别位於伦敦及华盛顿的两个世界区域预报中心 (WAFC) 通过人造卫星广播世界区域预报系统的产品。 目前我国民航国际航线的气象保障主要由伦敦航空气象中心提供。
WAFC提供的信息的精确度是相当高的,当然天有不测风云,天气的突然变化也会对飞行速度和路线带来影响。另外实际航班运营中由于交通量的问题,不可避免的会遇到流控。飞行速度,高度以及路线都会根据空中管制的要求做出更改,那么当然原来的飞行计划中预测的燃油消耗量也会变化,所以对所剩燃油量不断进行检查是十分重要的。
飞机中油箱一般来说分别位于左右机翼内和机体中部,各个油箱各自独立,所以不会出现在机身倾斜时从一个油箱流到另一个油箱的现象。如果燃油能够自由流动,那么飞行的重心就会不断变化,安定的飞行控制会变得十分困难。
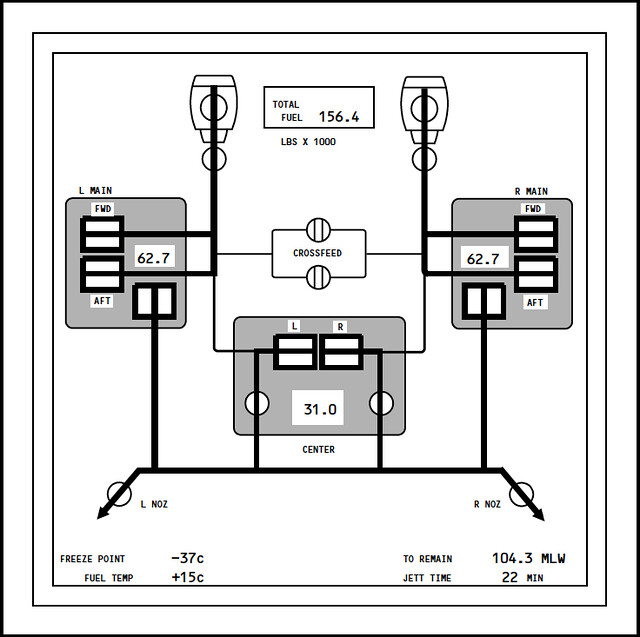
下图是波音777客机的油箱位置示意图,可以看到左翼主油箱Left Main Tank,中央油箱Center Tank和右翼主油箱Right Main Tank的相对位置。
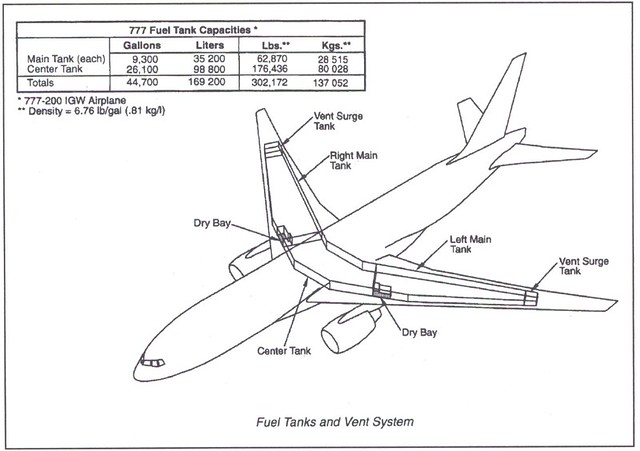 3个油箱都有相应的燃油泵并通过燃油管和单向活门等部件相连,为发动机供油时,系统会调整从每个油箱供油的顺序,并调整每个油箱的重量,保持重心在一个适当的位置,达到减轻翼根(翼根是飞机大翼和机身相连接的部分)处的应力集中作用。
3个油箱都有相应的燃油泵并通过燃油管和单向活门等部件相连,为发动机供油时,系统会调整从每个油箱供油的顺序,并调整每个油箱的重量,保持重心在一个适当的位置,达到减轻翼根(翼根是飞机大翼和机身相连接的部分)处的应力集中作用。图中还可以看到通气缓冲油箱Vent Surge Tank,它位于主翼的最高位置,起到油箱和外部的通气口的作用。因为随着燃油被送入发动机,油箱内的压力逐渐减少,相对于外部大气压力更大,即会产生一个挤压油箱的压力。比如我们都喝过带吸管的纸包装饮料,随着饮料被吸入纸盒内压力变小,盒子就会逐渐被外部大气压瘪。油箱也是一个道理,为了不被压力压瘪,通过这个通气口使油箱内的压力和外部保持一致,同时也能够使输油更加顺畅。
飞机重量的主要部分和配载集中在机身,而在空中时的升力主要来自机翼,因此向下的重力和向上的升力会在翼根附近产生一个弯曲力矩,这个力矩对飞机的结构有较强的影响。在主翼油箱中的燃油重量可以起到抵消升力,减少翼根弯曲力矩的作用,这就是要先给主翼油箱加油,并且尽量保持在机翼中的燃油的原因。
老式的波音747-200飞机在为发动机供油时首先使用中央油箱,中央油箱空了以后再使用两翼主油箱。波音777也基本采用了同样的方式。虽然首先使用的是中央油箱,但是其实3个油箱内的燃油泵全部都在运转,只不过中央油箱燃油泵的功率更大一些,因此首先直接为两侧发动机供油的是中央油箱。这样的好处是即使中央燃油泵出现了故障,两侧油箱燃油泵还在运转,起到了备份的作用。当中央油箱空了后,燃油泵就会自动停止运转。
波音777的EICAS显示器:
但是空中客车330-200的运转方式又略有不同,虽然同样是首先使用中央油箱,但是不是由中央油箱直接为发动机供油,而是先把中央油箱中的燃料移动到两侧主油箱,再通过左右翼主油箱内的燃油泵直接为发动机供油。
现代的客机的供油系统都做到了自动化,但是象波音747-200这样老式飞机是需要不断检查各个油箱内的残量,手动来进行各个油箱内的调整的。
下面再介绍一下载重与平衡(weight and balance)的概念,即飞机需要根据营运空重、业载和燃油重量及其分布,在满足各种限制条件下达到起飞重量、重心和配平的状态。经常乘坐飞机的旅客都知道,在飞行过程中,为避免引起飞机失衡从而影响飞机操作性是不允许旅客擅自调换座位的。
飞机在空中运行过程中没有任何的着力点,所以平衡重心是影响飞行安全的重要因素,每种机型的飞机对重心的前后移动都有一个限制范围,以确保飞行安全以及便利操纵、节省燃油,这个限制范围称为重心许可范围,飞机的重心不得超过其前后限制。
飞机重心略微偏前,飞机的稳定性好,遇到气流不易颠簸;飞机重心略微偏后,飞机的操纵性好,且省油。飞机重心过于靠前和靠后,甚至飞机重心超出安全允许范围则会造成严重的后果。轻则可能造成飞机起落架损坏,结构损伤、增加飞机油耗、缩短飞机寿命和损伤跑道等;重则在飞机起降阶段造成飞机擦尾、冲出跑道, 甚至失速坠毁。
重心位置是相对于平均空气动力弦(MEAN AERODYNAMIC CHORD,简称 MAC,即机翼的几何重心)线上的百分比来表现,单位为%MAC。比如下图的波音777,MAC长为7米,如果重心值为25%MAC,
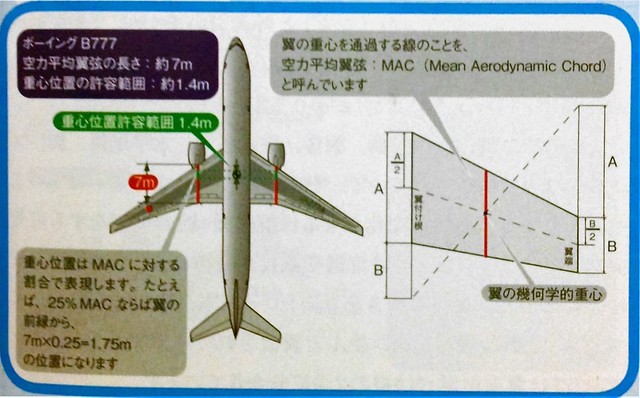 则重心位于机翼前缘的7米*25%=1.75米处。一般来说飞机的重心许可范围是非常小的,如上图的777的许可范围只有1.4米。再比如波音747的许可范围为13~33%MAC,空中客车380为29~44%MAC。
则重心位于机翼前缘的7米*25%=1.75米处。一般来说飞机的重心许可范围是非常小的,如上图的777的许可范围只有1.4米。再比如波音747的许可范围为13~33%MAC,空中客车380为29~44%MAC。在地面负责管理飞机重量和重心的是配载人员,他们对照飞机起飞性能表,根据机场气候、地形、障碍物对起飞重量的影响以及机场跑道对飞机起降重量的限制,计算出飞机的重量限制,确定最佳平衡位置重心,据此对货物、邮件和行李在飞机中的位置做出合理安排,即装载平衡表。如果飞机的实际重量和配载员制作的重量数据不符,会影响飞行员驾驶飞机,做出错误的飞行速度和角度,存在安全隐患。实际重量超过飞机允许的最大限制重量,可能会机毁人亡。
关于重量的计算事关乘客的平均体重设定,比如国内航线一般为64公斤,国际航线为73公斤,飞行员为77公斤,空中乘务员为59公斤。但是有时也有一些特殊情况。比如某航班需要搭载很多的相扑选手的话,要么就要事先听取调查每个选手的体重,然后根据每个人的座位情况,再计算出飞机总体的重心位置。在比如从伦敦到纽约-驾驶波音747-400一书中曾经提到某此航班的飞行员执行任务时,发现飞机比平时要难控制的多,比如起飞滑行跑道长,爬升率低等,但又找不到什么异常情况。后来落地以后一调查才知道,这次航班的乘客很多都属于一个古钱币收藏协会,这些收藏家们登机时都随身携带了很多沉重的古钱,因此飞机的实际重量大大超过了预测重量。万幸的是那次航班没有发生事故,毕竟那是一次极其危险的飞行。
完
-
客机驾驶探秘4.5 关于巡航速度
和巡航高度一样,巡航速度也同样需要考虑燃油经济性的问题。 类似汽车经常用1升汽油跑多少公里来评价性能, 对于飞机也可以用单位燃料的飞行距离来表现该性能,就这是续航率(Specific Range)。 所谓续航率是指无风状态时,每单位燃料之飞行距离,如10000磅(约4。5吨)时的数据, 其数值是TAS实际对气速度除以燃料流量。
续航率和速度的关系可以参考下图,
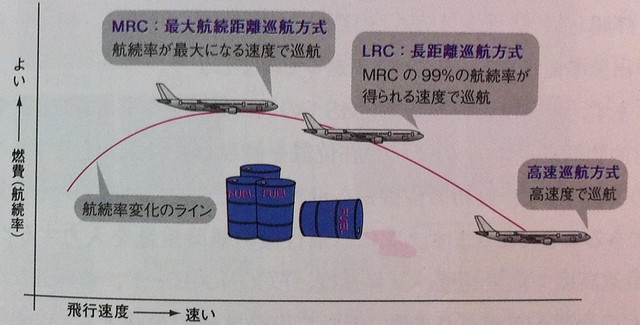
速度在横轴上表示,越往右侧表示速度越高。续航率在竖轴上表示,越往上表明经济性越好。 图中的弧线为飞机的性能曲线,可以看到低速和高速段的续航率较低,比较费油。 曲线中的最高点时的速度为MRC最大航程巡航速度,如果飞机以该速度飞行的话是最省油的, 但是可以看到此时的速度太慢了,乘客和航空公司都不会满意这个数值的。 因此哪怕费点油,又能快点飞到目的地,又能飞远些, 这就出现了LRC长距离巡航速度(long range cruise)这个指标。 LRC使用MRC的99%的指标飞行,也就是比MRC多消耗1%的燃油,但是可以增加9%速度。
当然MRC和LRC都是理想数值,在实际的运营中都使用经济速度的概念。 经济速度是使运营总成本最小的速度。
那么运营成本里面都包括什么项目呢? 主要是由飞机维护费用,保险金,机场使用费(航空公司需要向机场管理公司支付起降服务费、地面服务费、航路费、机场指挥费和候机楼内场地租用费等费用),工作人员工资奖金和燃油费用几部分组成。除了燃油费以外的几项成本可以算是与时间相关的成本,比如如果航班飞行时间长的话,需要支付给乘务人员的补助也要多(不知道国内也是不是这样的?),因此为了计算运营成本和经济速度的关系,又引进了下面成本指数CI的概念: CI=与时间相关的成本 / 燃油成本
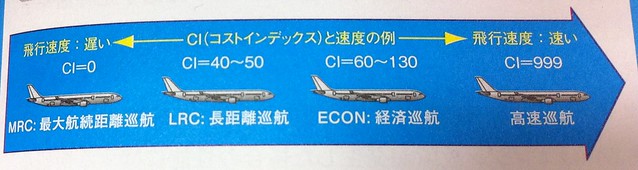
CI=0时的速度,即最重视燃油成本时的速度,即为MRC最大航程巡航速度,而CI=999时的速度,即最重视时间成本时的速度,即为最大巡航速度。
航空公司根据自己的经营方针设定CI以决定所采用的经济速度,如果重视燃油成本的话就采用较小的CI值,保证比较高的续航率,但是飞行速度相对较低;如果重视于时间相关的运营成本,就采用较大的CI值,于是飞行速度就相对较快。
可以看到下图中的CI和速度的关系,经济巡航速度的CI值在60和130之间,飞行速度略大于LRC长距离巡航速度。
建议以后每次乘坐航班,你都可以特意看一下飞机里屏幕显示上的速度,看看该次航行的巡航速度是多少。 下图是我拍于北京东京航线上的波音777-200客机,可以看到当时的对地速度为918公里/小时,飞行高度约12500米。

再谈一个个人亲身经历。 某次冬天从东京飞新德里,去的时候从东往西一路顶着高空jet气流, 最大地面速度只有650公里/小时,慢的象乌龟爬,结果飞行时间用了10个半小时。 而回程就顺风的厉害,看地面速度都达到了1100公里/小时! 因此回程的航班只用了6个半小时就到了,真是一个不可思议的经历。
Prev: 关于巡航高度 TOC: 目录 Next: 关于燃油消耗和重心
完
-
客机驾驶探秘4.4 关于巡航高度
一般来说短程的国内航线时的巡航高度基本是不变的,就如前几节介绍的一样,进入巡航以后一直到开始下降和降落,除非有恶劣天气或者某些紧急情况,飞机会一直保持这个高度的。但是对于远程越洋的国际路线,往往会采用Step Up Cruise,即逐渐升高巡航高度的方式,让我们结合一个波音777-300ER从东京到纽约的航班实例,看看如如何安排高度的。 考虑到燃油经济性的问题,飞机在高高度上比底高度时更加省油。但是在飞远程路线时,加的油要比短程时多很多,如果在大重量的情况下费劲地一次性地以高迎角爬升到巡航高度,反而燃油经济性会下降。在某个重量下飞机都有一个最合适的高度指标,随着燃油的消耗飞机重量不断下降,按照该重量时的高度指标,飞机逐步的提高高度,以获得最好的经济型。
以下图为例,这架波音777的起飞重量为343吨,起飞20分钟后首先上升到31000英尺高度平飞,因为这个高度对此时的重量的经济型最好。2个小时50分钟后,爬升到32000英尺高度。在32000英尺高度上飞行1小时10分钟以后,飞机重量降到298吨,飞机爬升到33000英尺。33000英尺高度上巡航了近4小时后,飞机重量降到了266吨,因此再次爬升到37000英尺。在37000英尺的高度上因为离目的地很近了,虽然只飞行了很短的40多分钟,但是航行整体的燃油经济型仍然很好。
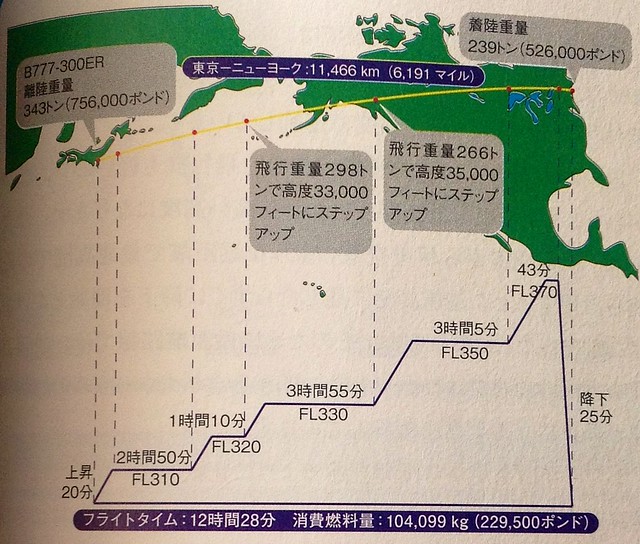 通过上图可以看到,采用逐步上升巡航高度的方法,飞行时间为12小时28分,燃油消耗量为105吨,比起一直在31000英尺高度巡航的方法,节约了2分钟的飞行时间和1。7吨燃料。
通过上图可以看到,采用逐步上升巡航高度的方法,飞行时间为12小时28分,燃油消耗量为105吨,比起一直在31000英尺高度巡航的方法,节约了2分钟的飞行时间和1。7吨燃料。今后你如果乘坐飞机出行,可以注意一下听外部发动机的声音。如果有那么1-2分钟发动机声音突然加大,那么很可能就是飞行员在调整升高巡航高度呢。留心观察机内娱乐系统上的高度显示,隔一段时间纪录一下将会是一个很好的习惯。 短程航班(比如从东京到大阪,只要不到一个小时)同样也有高度和燃油经济性的问题。此时加载燃油量小,飞机比较容易飞到高高度,但是由于目的地距离近,好不容易爬升到空气阻力的高度马上又要下降了,结果总体来说燃油消耗并不划算。因此就需要选择一个把爬升,降下和巡航包括在内,总体燃油消耗最合适的高度来作为巡航高度。 相对长一些的航线可以采用比较高的高度,但有时候要注意高速气流的存在。 高速气流(Jet Stream),是数条围绕地球的强而窄的高速气流带,集中在对流层顶或平流层,在中高纬西风带内或在低纬度地区都可出现。其水平长度达上万公里,宽数百公里,厚数公里。中心风速有时可达每小时200至300公里。在高空中以气流逆方向飞行注入逆水行舟,会大大减低飞机前进的速度,但是顺着气流走就会大大增加速度。因此从亚洲飞往北美和加拿大的航机多会取道这高速气流带,以缩短航程和节省燃油,而回程则可能会取道北极航线。 日本国内航线也会利用该气流,比如在冬季由东京羽田飞往福冈的航班,为了避开高速气流会选择比较低的高度。这样对面的气流速度大约为100公里/小时,比高高度的气流速度的300公里/小时要低得多。当然回程的时候就会利用高高度飞行了。 <a href=Prev: 飞行高度与气压以及最大飞行高度 TOC: 目录 <a href=Next: 关于巡航速度
-
客机驾驶探秘4.3 飞行高度与气压以及最大飞行高度
上一节介绍了关于速度的指标,这一节说明一下关于高度方面的数据。 飞机上高度计有两种,气压高度计(barometric altimeter)和无线电高度计(radio altimeter)。让我们先看看气压高度计。 我们都知道随着高度的上升,空气密度减少,气压随之下降。于是通过测量大气压,并与标准值比较就能得出测量地点的绝对高度值(海拔高度),这就是气压高度计(altimeter)的基本工作原理。使用气压来测量的好处是高度计体积小结构简单,但是也有缺点,就是除了高度以外,温度和水蒸气密度变化也会影响气压的变化。因此在飞机上飞行员一定要要根据当地实际大气情况对气压计进行校正,起飞前降落前都不能缺少,不能正确掌握的高度对于降落的危险性是不言而喻的了。 举个例子来说,前一天在高气压晴天天气下,某飞机降落在海拔高度6.4米的羽田机场,当时的气压为1013百帕,飞机上高度表的被校正到高度计设定29.92英尺汞柱,高度计显示为21英尺。第二天开始下雨,气压降低到997百帕,如果没有校正的话,此时高度计的显示就是450英尺,换算为米为137米。停在海拔6米处地面上的飞机,仪表显示居然是137米,天气对高度计的影响之大可见一斑。所以起飞之前飞行员一定要把高度计设定至997百帕,高度计设定29.45英尺汞柱。这个设定值的情报可以通过机场空中管制员,航空公司签派员或者机场通波ATIS来获取。
关于气压有几个名词会经常用到,下面简单总结一下。
- “场面气压QFE"是机场水平高度的气压,FE可以用"Field Elevation"来记忆。飞行员如果用QFE的高度计设定来校正高度表,那么在机场上高度表的指针就会指向0英尺。
- “修正海平面气压QNH"是根据国际民航组织所订立的标准大气将QFE转换而成的数值。NH可以用"Not Here"来记忆。上面提到的在机场时高度计设定时所使用的就是QNH值。飞行员如果用QNH的高度计设定来校正高度表,那么在机场上高度表的指针就会指向该机场的海拔高度,这也是航图上所标注的机场数据。因此在机场附近进行起飞,爬升,下降以及着陆过程时都需要以QNH值为标准来拨正高度表。这样就保证了所有起飞降落的飞机都使用同一个标准来测定飞行高度,防止撞地/飞机相撞或者异常接近等事故的发生。
- “标准大气压QNE"是指在标准大气条件下海平面的气压。其值为1013.2百帕(29.92英寸汞柱)。在机场附近可以以QNH值来做标准,但是在机场之间飞行时,气压的变化不定,也不可能在地面或者海洋上设立无数的测量站来测定QNH,所以这时候所有的飞机都统一使用一个标准,即QNE的话,那么就可以简化高度表拨正并保证空中安全了。那么什么条件下把QNH调整到QNE呢?按照规定有一个过渡高度,当QHN超过这个高度以后,飞行员就需要把高度计设定至QNE,也就是29.92英寸汞柱,1013.2百帕。另外每个国家对过渡高度的规定不一样,比如上升时中国为3000米,日本为14000英尺,美国为18000英尺,英国为6000英尺,新加坡和泰国为11000英尺。
继续以波音777为例看一下实际的仪表显示,下图PFD中的高度显示在右侧的高度条的中央方框内,
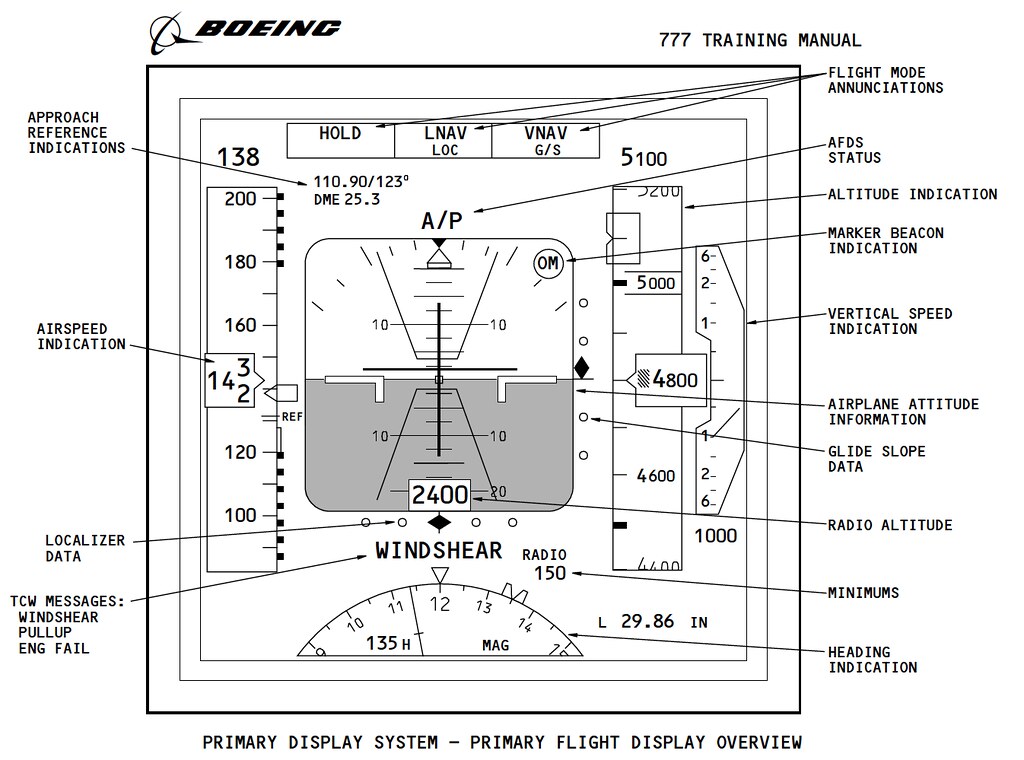 数字"4800"表明了高度计显示为4800英尺,而下方的"29.86 IN"数据表明了高度计设定为29.86英尺汞柱,说明这时飞机使用的是QNH值。
再看一下下面这个图,把高度计部分单独拿出来,对各个数字进行了具体解释。
数字"4800"表明了高度计显示为4800英尺,而下方的"29.86 IN"数据表明了高度计设定为29.86英尺汞柱,说明这时飞机使用的是QNH值。
再看一下下面这个图,把高度计部分单独拿出来,对各个数字进行了具体解释。
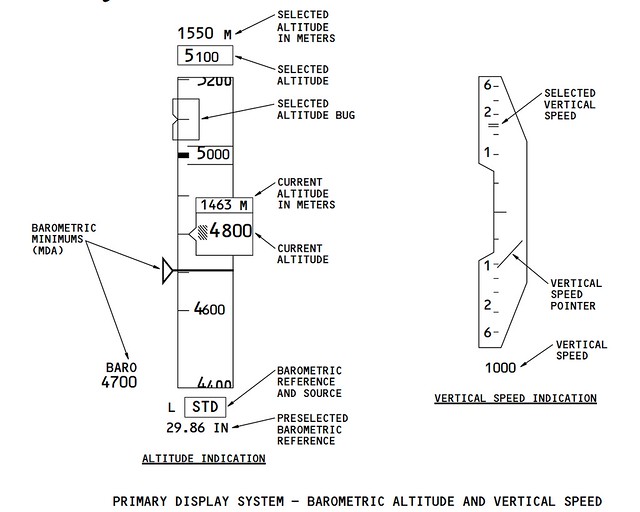 我们可以看到中央方框里处,“CURRENT ALTITUDE"箭头指向的数字"4800"表明了高度计显示为4800英尺,下面还有一个方框内显示着"STD”,这表明当前飞机使用的QNE标准大气压。同时还可以看到STD下方的"PRESELECTED BAROMETRIC REFERENCE"箭头指向的"29.86 IN"数据。这是预设置好的高度计值,被设定为29.86英尺汞柱。飞行员可以在下降阶段中预先把目的地的QNH值调好,飞机低于过渡高度后只要按一下切换键就可以,大大简化了操作。
我们可以看到中央方框里处,“CURRENT ALTITUDE"箭头指向的数字"4800"表明了高度计显示为4800英尺,下面还有一个方框内显示着"STD”,这表明当前飞机使用的QNE标准大气压。同时还可以看到STD下方的"PRESELECTED BAROMETRIC REFERENCE"箭头指向的"29.86 IN"数据。这是预设置好的高度计值,被设定为29.86英尺汞柱。飞行员可以在下降阶段中预先把目的地的QNH值调好,飞机低于过渡高度后只要按一下切换键就可以,大大简化了操作。
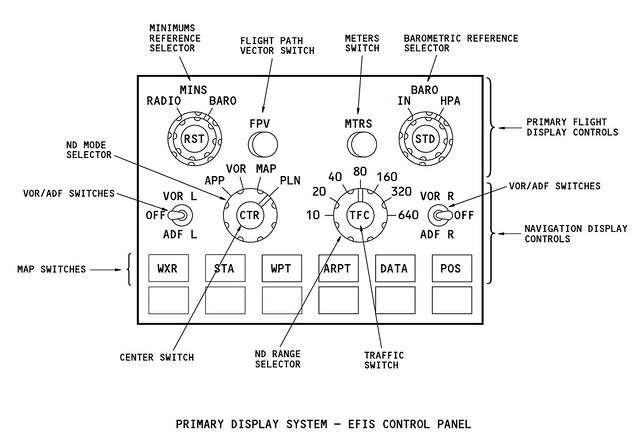 STD键位于上图中的EFIS控制台中右上方,“BAROMETRIC REFERENCE SELECTOR"箭头指向的BARO旋钮处就是高度表设定。
关于高度的单位一般欧美日本都使用英尺,中国使用米,但是在使用QNE高度设定时都使用Fly Level这个说法。使用Fly Level时数字省略掉后面2个零,因此35000英尺被叫做Fly Level 350,一般写为FL350。比如在3.7节的空中管制对话中曾经介绍过这样的介绍:
“Tokyo Control,Air System 115,Leaving 7800 for FL210,Initially Proposed FL410”
“东京区域,这里是Air System 115航班,正在通过高度7800英尺至21000英尺,最终目标高度41000英尺”
这里就使用了7800、FL210和FL410来表现高度,现在我们可以知道了,7800是QNH下的高度7800英尺,FL210是QNE下的高度21000英尺的意思。
那么一般来说民航客机最高能够飞多高呢?关于最大飞行高度,即"升限"涉及到2个方面的要素,升力和机体强度问题。
我们知道飞机能够飞行是因为有空气的存在,发动机推动飞机当到达一定速度以后,作用在机翼上的气流会产生向上的升力使飞机不断爬升。但是高度越高,空气越是稀薄,进入发动机的空气越少,发动机所能产生的推力也就越低,最终到达飞机所能向上爬升的极限,这时飞机只能进行平飞了。这就带来飞机的"实用升限"的概念。当飞机爬升速度越来越低,其垂直方向的上升率下降到300英尺/分(90米/分,慢得和人行走的速度差不多了)时所对应的高度即为实用升限。因此同类型飞机,发动机功率越大,重量越轻,实用升限也就越高。
机体强度涉及到飞机内外压强差的问题。在1万米上以上的高空,气温约为零下50度,气压也只有地面上的20%,因此客机里如果没有空调和增压设备提供适当的温度和气压,乘客是无法生存的。对于空调一般来说客舱内的温度都以24度为标准,夏天时夏装比较薄会适当调高温度,而冬天冬装较厚会适当调低一些温度。但是相比温度,增压调节就比较困难一些。
比如说如果要始终保持客舱内一个大气压情况下不断上升,随着外部气压不断下降,内外压力差的作用下,飞机就会象气球一样不断膨胀起来。在11000米时内外差的压力会达到8。1吨/平米作用到机体上,而在13000米高度时达到8。7吨/平米的力量。这就要求飞机的机体强度能够抵抗如此大的压力而不能变形。同时随着每班航班不断上升下降,作用在机体上膨胀收缩的力量不断重复,最终会造成金属疲劳,产生机体破裂等强度上的大问题。
因此在飞机设计上,随着高度的变化,相对外部气压变化的同时也会逐渐调整机内的气压,减少内外压力差影响。当然气压过低会造成人体不适,所以即使降低气压最低也只是降到0。75大气压,也就是相对于海拔2400米高度处的气压。为了和实际的飞行高度区别,这个高度值别称做"客舱高度”。
因此飞机的最高飞行高度是以和客舱高度相比时的压力差决定的。比如波音747的机体最大承受压力差为6。1吨/平米,为了维持客舱高度在2400米以下时的最大飞行高度为13750米。
让我们再看看其他现代客机的最大飞行高度数据。
空中客车380 压力差6吨/平米 最大高度13100米
空中客车330 压力差5。8吨/平米 最大高度 12520米
波音777 压力差6吨/平米 最大高度13130米
完
STD键位于上图中的EFIS控制台中右上方,“BAROMETRIC REFERENCE SELECTOR"箭头指向的BARO旋钮处就是高度表设定。
关于高度的单位一般欧美日本都使用英尺,中国使用米,但是在使用QNE高度设定时都使用Fly Level这个说法。使用Fly Level时数字省略掉后面2个零,因此35000英尺被叫做Fly Level 350,一般写为FL350。比如在3.7节的空中管制对话中曾经介绍过这样的介绍:
“Tokyo Control,Air System 115,Leaving 7800 for FL210,Initially Proposed FL410”
“东京区域,这里是Air System 115航班,正在通过高度7800英尺至21000英尺,最终目标高度41000英尺”
这里就使用了7800、FL210和FL410来表现高度,现在我们可以知道了,7800是QNH下的高度7800英尺,FL210是QNE下的高度21000英尺的意思。
那么一般来说民航客机最高能够飞多高呢?关于最大飞行高度,即"升限"涉及到2个方面的要素,升力和机体强度问题。
我们知道飞机能够飞行是因为有空气的存在,发动机推动飞机当到达一定速度以后,作用在机翼上的气流会产生向上的升力使飞机不断爬升。但是高度越高,空气越是稀薄,进入发动机的空气越少,发动机所能产生的推力也就越低,最终到达飞机所能向上爬升的极限,这时飞机只能进行平飞了。这就带来飞机的"实用升限"的概念。当飞机爬升速度越来越低,其垂直方向的上升率下降到300英尺/分(90米/分,慢得和人行走的速度差不多了)时所对应的高度即为实用升限。因此同类型飞机,发动机功率越大,重量越轻,实用升限也就越高。
机体强度涉及到飞机内外压强差的问题。在1万米上以上的高空,气温约为零下50度,气压也只有地面上的20%,因此客机里如果没有空调和增压设备提供适当的温度和气压,乘客是无法生存的。对于空调一般来说客舱内的温度都以24度为标准,夏天时夏装比较薄会适当调高温度,而冬天冬装较厚会适当调低一些温度。但是相比温度,增压调节就比较困难一些。
比如说如果要始终保持客舱内一个大气压情况下不断上升,随着外部气压不断下降,内外压力差的作用下,飞机就会象气球一样不断膨胀起来。在11000米时内外差的压力会达到8。1吨/平米作用到机体上,而在13000米高度时达到8。7吨/平米的力量。这就要求飞机的机体强度能够抵抗如此大的压力而不能变形。同时随着每班航班不断上升下降,作用在机体上膨胀收缩的力量不断重复,最终会造成金属疲劳,产生机体破裂等强度上的大问题。
因此在飞机设计上,随着高度的变化,相对外部气压变化的同时也会逐渐调整机内的气压,减少内外压力差影响。当然气压过低会造成人体不适,所以即使降低气压最低也只是降到0。75大气压,也就是相对于海拔2400米高度处的气压。为了和实际的飞行高度区别,这个高度值别称做"客舱高度”。
因此飞机的最高飞行高度是以和客舱高度相比时的压力差决定的。比如波音747的机体最大承受压力差为6。1吨/平米,为了维持客舱高度在2400米以下时的最大飞行高度为13750米。
让我们再看看其他现代客机的最大飞行高度数据。
空中客车380 压力差6吨/平米 最大高度13100米
空中客车330 压力差5。8吨/平米 最大高度 12520米
波音777 压力差6吨/平米 最大高度13130米
完
-
客机驾驶探秘4.2 飞行速度的指标以及飞机的最大飞行速度是多少?
在巡航阶段,尽管飞机上的自动驾驶仪器已经非常先进,飞行员可以不用直接进行操纵, 但是并不说明飞行员可以闲着,他们要不断扫描各种仪表,检查各种飞行数据,并时不时记录下来,还是很繁忙的。
下面就分几节对飞行数据方面的信息做个简单总结。 首先看看速度方面。
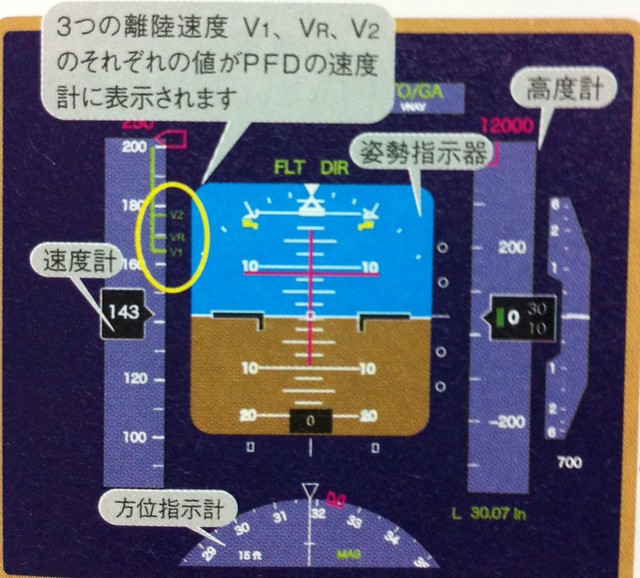
第一个是IAS 指示空速(Indicated Airspeed),这个数字显示在PFD中的左侧速度条的中央方框内, 如下图中波音777训练手册中所示,在AIRSPEED INDICATION箭头所指处的数字即为IAS, 显示出当前速度为142.5节。
指示空速是以空速管(或称皮托管,Pitot)和静压孔测出的飞机相对于空气的速度,空速管的外形可以参看下图,
 这是我在东京羽田国际机场国际航站楼上拍摄的全日空公司的波音777,
可以看到机首右侧向前伸出来的2个象针头似的探头,它们就是空速管。
为了保证安全,一般飞机上都会安装多个空速管以提高可靠性。
比如波音777上装备有3个,右侧2个,左侧1个。
这是我在东京羽田国际机场国际航站楼上拍摄的全日空公司的波音777,
可以看到机首右侧向前伸出来的2个象针头似的探头,它们就是空速管。
为了保证安全,一般飞机上都会安装多个空速管以提高可靠性。
比如波音777上装备有3个,右侧2个,左侧1个。空速管的原理比较简单,如下图所示,图中下方写着"全压"处(即动压)代表空速管前端空气进气口, 写着"静压"的地方代表静压孔,位于飞机机身侧面中部,
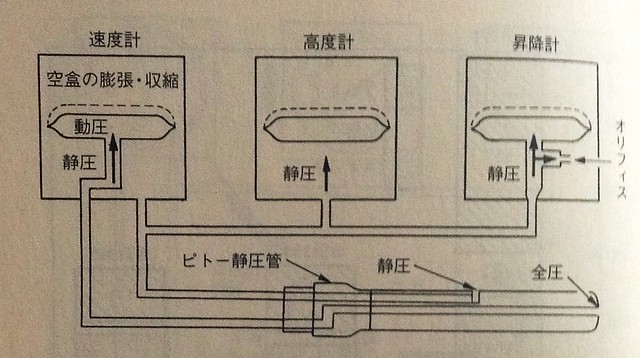 空速管感应的正前方来的冲压空气压强与侧面静压孔感应的静压的压强差即为指示空速的输入。
飞机速度快,那么动压就大,因此推动速度计里的"空盒"使之膨胀,反之收缩,
这里的"空盒"是由两片非常薄的金属板焊接而成,受到外界压力后盒子会轻微变形,
“空盒"的移动量传到计算机,因为动压和速度的乘方成正比,因此经过计算,系统就会得到指示空速,单位是海里/小时(knot)。
空速管感应的正前方来的冲压空气压强与侧面静压孔感应的静压的压强差即为指示空速的输入。
飞机速度快,那么动压就大,因此推动速度计里的"空盒"使之膨胀,反之收缩,
这里的"空盒"是由两片非常薄的金属板焊接而成,受到外界压力后盒子会轻微变形,
“空盒"的移动量传到计算机,因为动压和速度的乘方成正比,因此经过计算,系统就会得到指示空速,单位是海里/小时(knot)。动压(指示空速表的显示数值)=1/2 * 空气密度 * 真速度^2
通过这个公式可以知道在同样的动压,也就是IAS显示下,高度不同,飞行速度也就不同。关于这一点下面说明TAS时还会具体用实际数字来解释。指示空速IAS是未经补偿处理的数据,也称作表速,表示飞机相对于空气的速度。 IAS并不能代表飞机相对于地面飞得快还是慢,但是它非常重要,因为指示空速是飞机的气动力性能指针, 作各种机动动作和各种舵面操纵(如何时放襟翼,最大飞行速度,失速速度)等都需要以IAS作为标准。 因此飞行员在飞行中要不断监视这个指标。
另外需要知道的是动压是与空气密度成正比的,因此飞行高度越高空气密度越低, 因此即使飞机相对于地面高速飞行时,比如对地速度逐渐加速到900公里/小时,IAS还是会可能慢慢降低的。
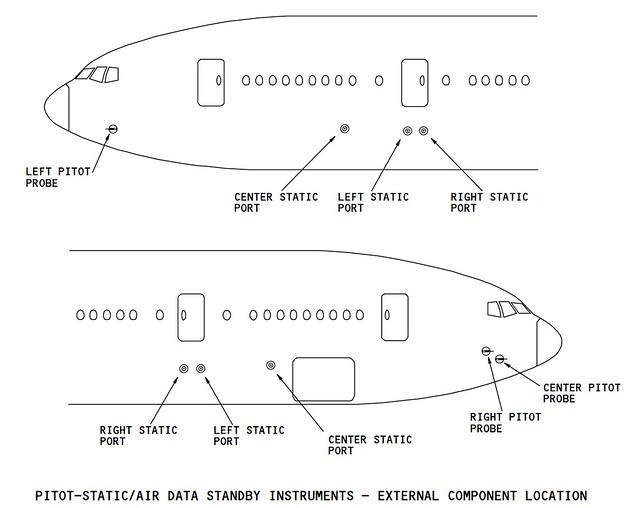
参考:下图为波音777的空速管和静压口位置的示意图。
第二个关于速度的指标是TAS实际对气速度(TRUE AIRSPEED),或者叫真空速,如下图ND中屏幕左上角处的"TAS 326"显示。
-thumb-640x434.png)
上面的IAS指示空速是以相对于地面上的空气密度为标准计算出来的,因此以飞机当前高度的气压为标准计算出来的速度才是真正的飞机空速,这就是TAS实际对气速度,通过TAS才能真正知道飞机飞行速度的快慢。这也是为什么TAS要显示在ND导航显示器中的原因。
让我们看看IAS和TAS数据比较。比如IAS为270节的时候, 地面上:TAS 当然也为270节。动压17大气压。 高度20000英尺时(约6100米):空气密度减少53%,为保持同样的动压TAS需要362节,即670公里/小时速度 高度30000英尺时(约9100米):空气密度减少37%,为保持同样的动压TAS需要423节,即783公里/小时速度 高度35500英尺时(约10800米):TAS为462节,即856公里/小时速度
可以看出来飞的越高,即使不用增加发动机推力,飞机的实际速度还是会越来越快, 对于航空公司和乘客来说,节约旅程时间,能尽快到达目的地,那么尽量以高高度飞行是个皆大欢喜的选择。
第三个速度指标为GS,也就是地面速度,这个指标的意思最好理解,是飞机相对于地面的飞行速度。
GS速度和风力风向有关,顶风条件来说,从TAS实际对气速度里减去相对于飞行方向的风速就是GS地面速度;对于顺风来说加上风速就是GS。
因此看上图中GS338表示对地速度(GROUND SPEED)为338节/小时, TAS326表示实际对气速度(TRUE AIRSPEED)为326节, 下面的336度/11表明风向为336度,风速为15节, 再下面的箭头指明的风向,因此可以看出此时飞机基本处于正顺风状态,所以对地速度比对气速度要快。
-
客机驾驶探秘4.1 导航的基本知识
进入巡航阶段以后,飞行员们可以稍微松口气,放松一下起飞以来紧张的神经。 客舱乘务员也会为驾驶舱提供咖啡等饮料服务,毕竟飞机内空气干燥,飞行员需要时不时补充水分的。
趁他们休息时那么让我们稍稍也停下,回过头来看看从起飞起这一路的行程吧。
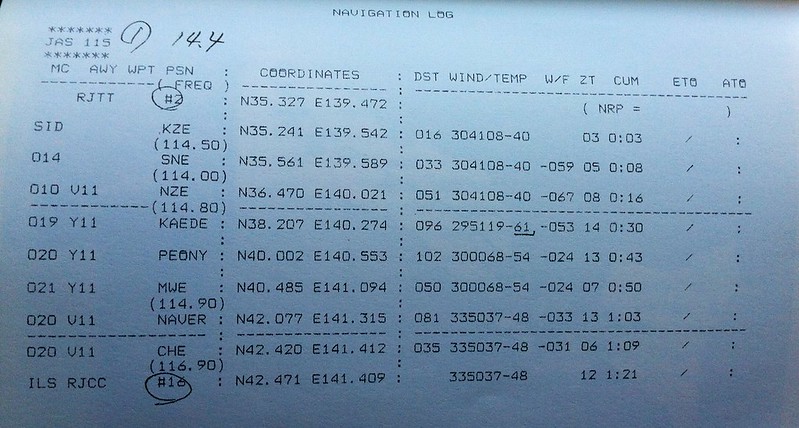
以JAS115航班为例,首先看一下航路图和导航日志NAVIGATION LOG,
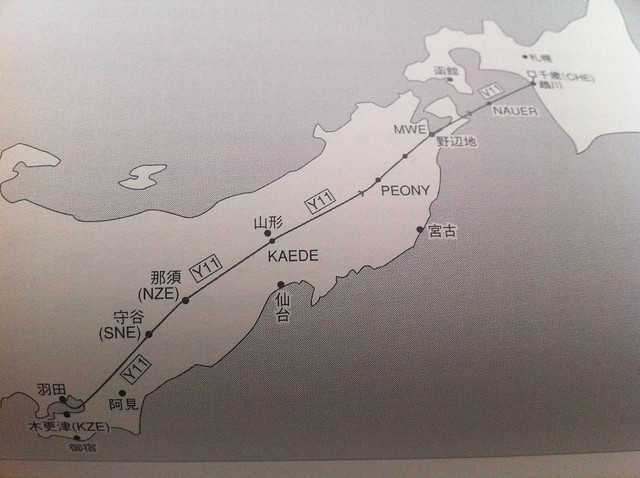
飞机选择的导航航路为标准离场程序SID,木更津KZE导航站,守谷SNE导航站,NZE那须导航站, 山形KAEDE航路点,PEONY航路点,野边地MWE航路点,海上的NAUER航路点,以及北海道的千岁CHE导航站。 飞机基本上沿着Y11航路飞行,从起飞到到达守谷SNE导航站大约累计飞行50英里, 而飞行上升到巡航阶段的那须NZE导航站时累计飞行约100英里(160公里),高度达到40000英尺(12000米),飞行所需时间大约16分钟,如下图所示。
在导航中经常会用到VOR、DME等航空用语,下面就简单说明一下。
VOR(Very High Frequency Omni-directional Range 甚高频全向信标)是一种用于航空的无线电导航系统。其工作频段为108.00 兆赫- 117.95 兆赫的甚高频段,故此得名。 VOR系统于1949年被国际民航组织批准为国际标准的无线电导航设备,是目前广泛使用的陆基近程测角系统之一。 VOR发射机发送的信号有两个:一个是相位固定的基准信号;另一个信号的相位随着围绕信标台的圆周角度是连续变化的,也就是说各个角度发射的信号的相位都是不同的。 向360度(指向磁北极)发射的与基准信号是同相的(相位差为0),而向180度(指向磁南极)发射的信号与基准信号相位差180度。 飞行器上的VOR接收机根据所收到的两个信号的相位差就可以计算出自身处于信标台向哪一个角度发射的信号上,这样飞机使用VOR就可以确定飞机相对VOR导航台的方位。
VOR通常与测距仪(DME,即Distance Measurement Equipment)同址安装,称为VOR-DME台, 在提供给飞行器方向信息的同时,还能提供飞行器到导航台的距离信息,这样飞行器的位置就可以唯一的被确定下来。
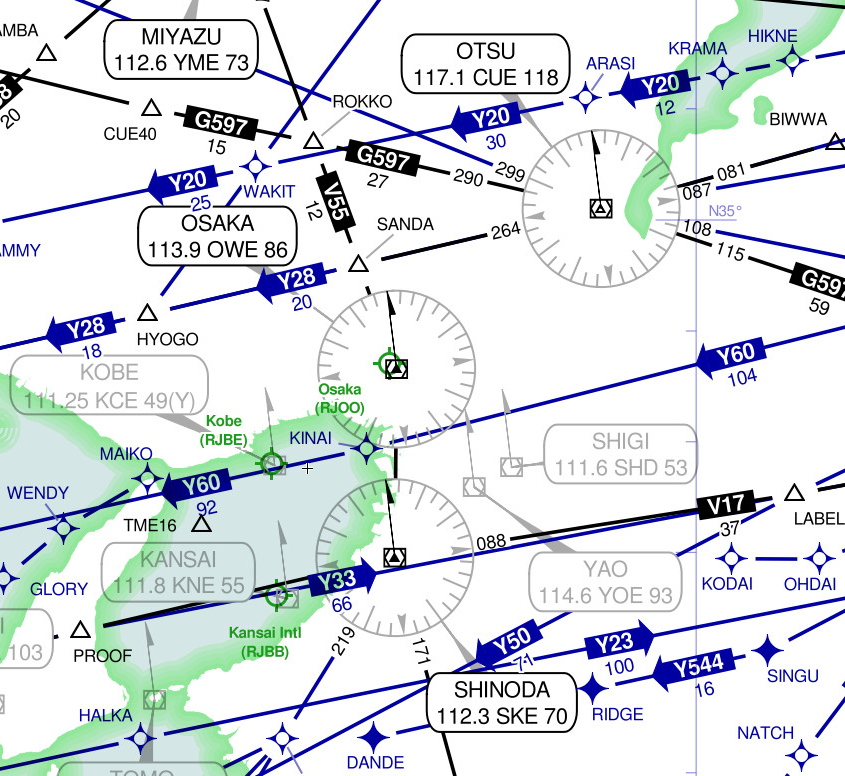
下图为位于大阪国际机场内的VOR/DME导航台,代号为OWE,使用频率113.9MHz,由本人拍摄于大阪机场32L跑道外侧。

在航路图上,VOR由带刻度的圆表示,在旁边用方框注明其名称,频率,识别代号等信息。 下图为skyvector网站的截图,可以看到中央处的大阪OSAKA OWE导航台信息。
-thumb-640x587.png)
让我们再看一下上图中的右上方的OTSU导航台,代号CUE,频率117。1, 可以看到通过该导航台处于几个航路的交汇点,每一条航路处都有一些数字,如081,087,108等, 这些数字称为VOR径向(Radial),一般记为R-081和R-087等。 R-001表示这条径向与该VOR台的磁北方向夹角81度,R-087就是夹角87度。
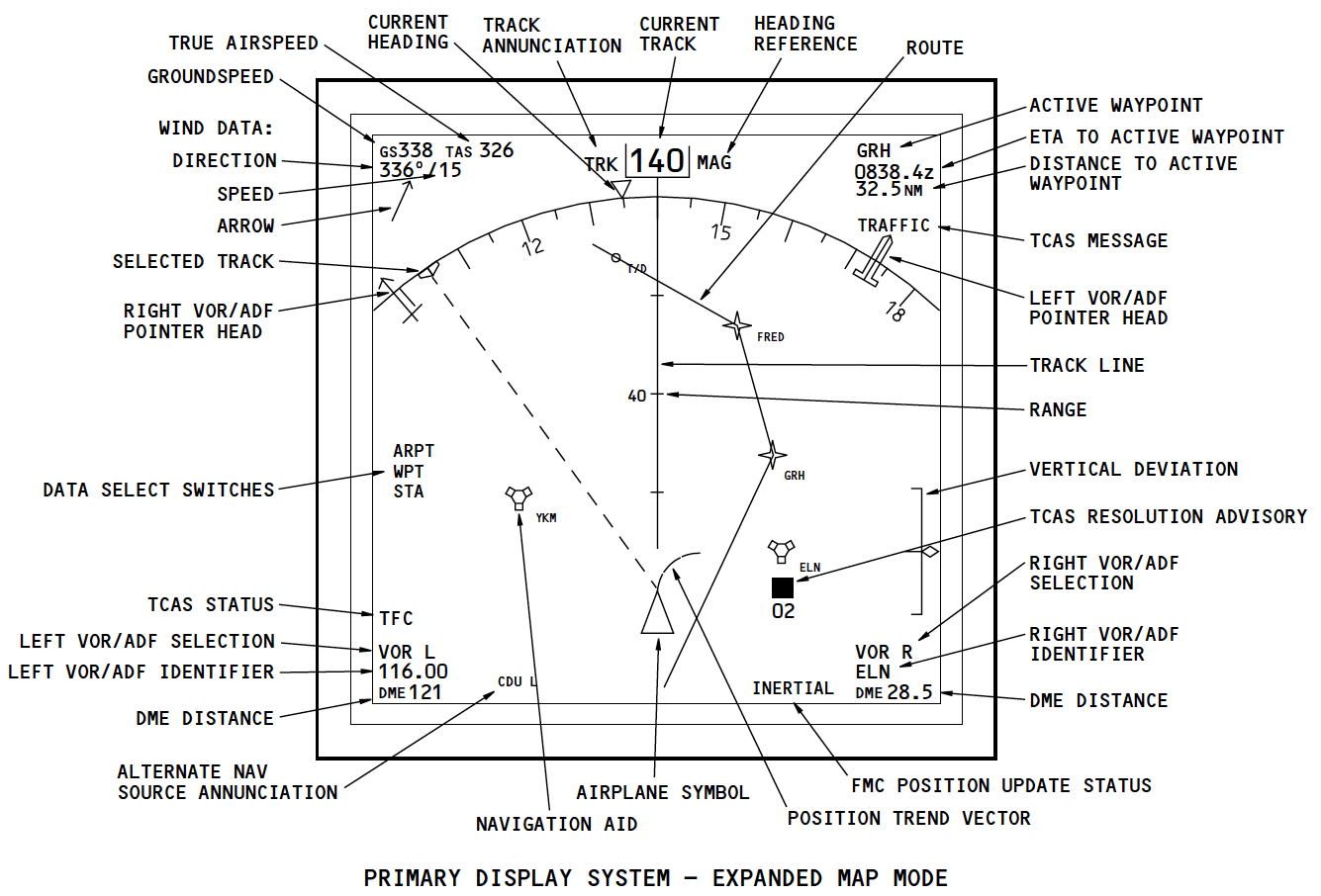
飞机沿着事先输入的航线自动导航飞行,飞行员可以在ND导航显示器上看到自己的当前位置以及各个导航台和导航点的信息,可以说是一目了然。 下图为波音777型飞机的地图模式时的显示例,
图中中央下方处三角形的AIRPLANE SYMBOL处为飞机自身的标志, 曲折的实线ROUTE线为FMS中设定好的航路线,航路上的星形标记为航路点, 虚线的SELECTED TEACK为使用自动驾驶面板控制台MCP中设定的方位,指向90度方向。
图中正上方方框CURRENT TRACK内的数字表明当前飞机的飞行方向,140度(指向磁北极), 而旁边的标为TRK的三角形处显示出的CURRENT HEADING表明为机首方向,为135度。 这两个数据表明飞机的前进方向并不等于机首指向的方向,这是因为受风向的影响, 飞行管理系统计算机FMS指示飞机机首指向略微向风的上手方向,这样可以保证飞机整体前进方向直行。 这两个角度数字之间的差值就是在3。5节中提到的风向修正角WCA(Wind Correction Angle)。
-
客机驾驶探秘3.8 进入平飞巡航
这时飞机离开了东京北关东区域管理中心,开始进入东北区域,以波音777-200的Air System 115航班为例, 起飞离地后经过16分钟,飞机此时到达了栃木県的那須地区,经过NZE VOR导航台,
高度达到了39000英尺。
从上图可以看到,飞机从守谷SNE导航台处开始进入到R-NAV(区域导航,Area navigation)的 Y11航路,
并将沿该航路一路向北,一直延续到北海道的千岁导航台。这时ATC又从空管接到新的联系,开始进行区域间移交: “Air System 115,Contact Tokyo 118.9” 意思是 “Air System 115航班,请联系东京东北区域,频率为118.9”, 飞行员复诵道 “Tokyo Control 118.9,Air System 115” 意思是 “收到,联系东京区域118.9,Air System 115航班”
然后飞行员把电台通信频率调至东北区调的118.900MHz,并联系道: “Tokyo Control,Air System 115,Leaving 396 Climb 410” 意思是 “东京区域,这里是Air System 115,正在通过39600英尺,上升到41000英尺” 东北区调的空管员确认收到航班的信号,并回答 “Air System 115,Tokyo Control,Roger” 意思是 “Air System 115,这里是东京区域,收到”
飞机高度逐渐接近巡航高度,当达到距离预定高度还有900英尺时(以波音737为例), 驾驶舱内的高度警告信息系统会发出"咚"的提醒音,并且琥珀色的高度警告Altitude Alert信号灯亮起, 提醒飞行员飞机已经接近巡航高度了。 当高度达到距离预定高度还有300英尺时(以波音737为例),警告灯又会自动关灭。
与此类似的高度警告还会在平飞阶段飞机高度离开了预订高度300英尺时发出警告。
飞机接近巡航高度后,驾驶管理系统开始自动向下调整俯仰角, 位于油门附近的水平尾翼配平(STAB TRIM)控制盘再次自动向前方转动,飞机逐渐进入平飞姿态。
 从PFD上可以看到右侧垂直速度条上渐渐接近到中央的0点,而左侧的速度条中的速度值越来越大。
从PFD上可以看到右侧垂直速度条上渐渐接近到中央的0点,而左侧的速度条中的速度值越来越大。当飞机高度达到距离预订高度还有100英尺时(以波音737为例), PFD上的左上方FMA飞行模式栏里的俯仰姿态设定由VNAV SPD会变为绿色的高度获得ALT ACQ模式, 如下图中的16阶段所示。
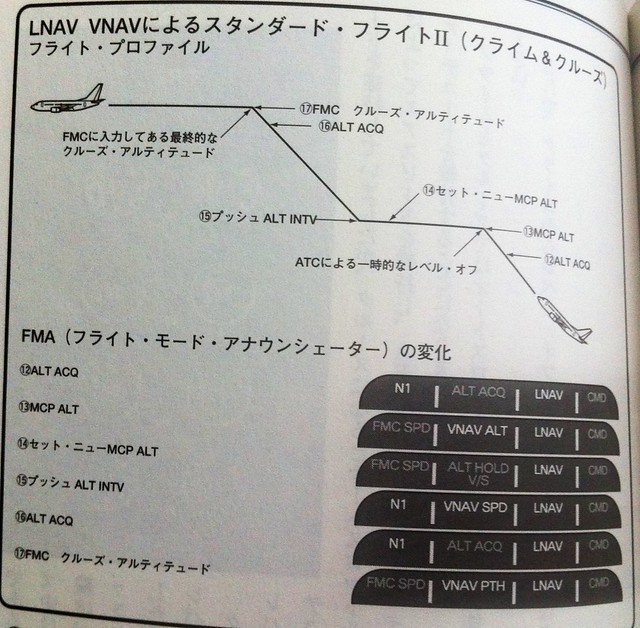
达到巡航高度后,飞机进入水平飞行,FMA飞行模式栏中的推力显示也会发生变化,由N1模式变化为FMC SPD模式, 俯仰姿态也由ALT ACQ变化为VNAV PTH模式,如上图中的17阶段所示。
-
客机驾驶探秘3.7 ATC移交区调,继续爬升
首先再次以东京羽田机场到北海道扎幌新千岁机场的AirSystem115航班为例, 看一下本次航班从出发起飞到巡航降落所需要的空中交通管制流程:
1 羽田机场: 放行管制Delivery-地面管制Ground-塔台管制Tower-离场管制Departure 2 区域管制: 东京区域管制区Tokyo Control-扎幌区域管制区Sapporo Control 3 新千岁机场: 进场管制Approach-塔台管制Tower-地面管制Ground
飞机在机场管制和区域管制之间不断被移交给不同的单位,如同接力一样保证在每一段区域中的飞行安全,如下面两图所示。
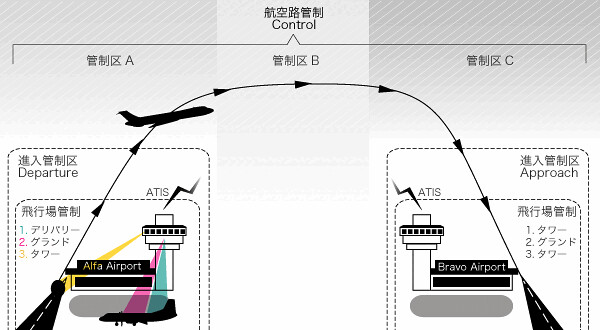 左边为出发机场内管制的放行,地面,塔台,离场管制
右边为达到机场内管制的进近,塔台,地面管制
左边为出发机场内管制的放行,地面,塔台,离场管制
右边为达到机场内管制的进近,塔台,地面管制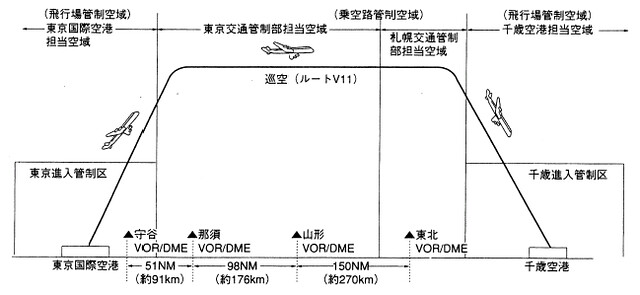 飞机的飞行高度和所在区域管制的示意图
飞机的飞行高度和所在区域管制的示意图
下面是日本的区域管制区的部分介绍,可以看到实际上每个管制区下面又分为几个小的管制区sector,
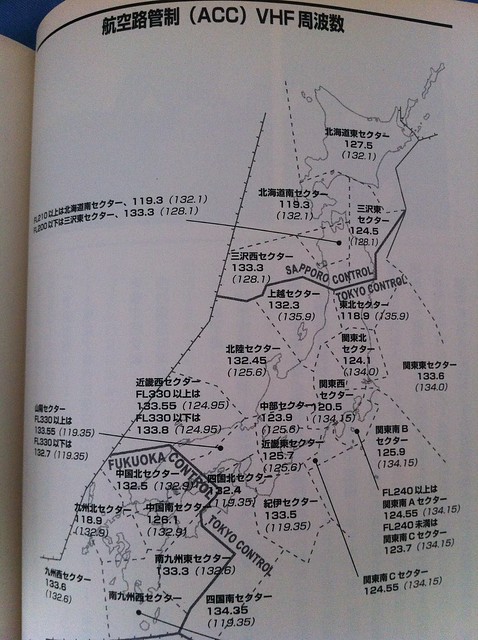 比如本次航班要经过东京管制区内的关东西区,关东北区和东北区,
以及扎幌管制区内的三泽东区和北海道东区,一共5个sector的接力才能最后达到扎幌机场的管制区。
比如本次航班要经过东京管制区内的关东西区,关东北区和东北区,
以及扎幌管制区内的三泽东区和北海道东区,一共5个sector的接力才能最后达到扎幌机场的管制区。AirSystem115航班在向Moriya守谷导航站方向不断上升中, 羽田机场的离场管制开始指示飞行员联系东京区域管制: “Air System 115, Contact Tokyo Control 124.1, Good day” 意思是 “Air System 115,请联系东京北关东区域管理中心124.1,Good day” 副驾驶复诵道 “Tokyo 124.1, Air System 115, Good day” 后,把电台通信频率调至离场管制124.100MHz,并联系道: “Tokyo Control,Air System 115,Leaving 7800 for FL210,Initially Proposed FL410” 意思是 “东京区域,这里是Air System 115,正在通过高度7800英尺至21000英尺,最终目标高度41000英尺” 东京北关东区域管制员确认移交并发出如下指示: “Air System 115, Tokyo Control, Roger, Cancel Restriction Climb and Maintain FL410” 意思是 “Air System 115,这里是东京空域,收到。取消上升高度限制,保持41000英尺” 副驾驶继续复诵指令: “Cancel Restriction, Climb and Maintain FL410, Air System 115” 即 “取消限制,上升并保持41000英尺,Air System 115”
-
客机驾驶探秘3.6 ATC移交离场管制,进入VNAV模式
以AirSystem115航班为例,飞机按照羽田机场Moriya7号离场程序,先沿着跑道(16R)方向飞行到图右下角的KZE(KISARAZU木更津)导航点后,自动向左压坡度30度,拐弯以14度方向(基本接近与正北方向)向SNE(MORIYA守谷)导航点飞行。
此时塔台管制员确认飞机出发无误以后,指示飞行员联系出发管制: “Air System 115,Contact Departure” 意思是 “Air System 115,请联系东京离场管制” 副驾驶复诵道 “Departure,Air System 115” 即 “联系东京离场管制,Air System 115” 后,把电台通信频率调至离场管制120.800MHz,并联系道: “Tokyo Departure,Air System 115,Leaving 1800” 意思是 “东京离场管制,这里是Air System 115,通过1800英尺” 管制员回答道 “Air System 115,Tokyo Departure,Rader Contact,Turn Left Heading 020, Vector to Moriya, Climb and Maintain 210” 意思是说 “Air System 115,这里是东京离场管制,雷达看到,左转航向020,雷达引导到Moriya,上升并保持21000英尺” 副驾驶复诵: “Left 020,Direct 210,Air System 115” 即 “左转航向020,保持21000英尺,Air System 115”。
根据上面的标准离场程序,我们知道在MORIYA前方11英里的地方有一个高度限制, 即必须在13000英尺(约3300米)高度以下飞行。 但是在这里离场管制员允许飞机员可以不经过KZE航路点,直接转弯飞向MORIYA并直接上升至21000英尺,也许是这天流量小的缘故吧。 对于航空公司来说这既节约时间又节省燃油,实在在好不过。 因此飞行员就在MCP上把航向设定旋钮转到020处。
现在飞机的速度处于MCP SPD模式,所以飞行员需要不断加大速度指示,并不断把放下的襟翼收起来。 比如以前文的737-500的为例,起飞是襟翼为5度,那么飞行员就可以先收起到1度Flap1。 Flap1是的速度条件为V2+15节以上,而现在爬升速度已经达到V2+20节,所以收起到1度是没有问题的。 同时起飞后程序也开始被执行,自动减速档从RTO关至OFF,
 起落架档也移到中间位置的OFF档(从上至下分别为UP/OFF/ON),发动机起动开关也从CONT设至OFF档。
速度继续增加,这是把襟翼全部收起也没有问题了。737-500的襟翼机动速度在UP状态时为210节,在190节左右时机长指示副驾驶Flap UP,这样前后缘襟翼全部收入到机翼之中,飞机处于空气阻力最小的状态了。
起落架档也移到中间位置的OFF档(从上至下分别为UP/OFF/ON),发动机起动开关也从CONT设至OFF档。
速度继续增加,这是把襟翼全部收起也没有问题了。737-500的襟翼机动速度在UP状态时为210节,在190节左右时机长指示副驾驶Flap UP,这样前后缘襟翼全部收入到机翼之中,飞机处于空气阻力最小的状态了。 -
客机驾驶探秘3.5 打开自动驾驶模式
飞机继续不断上升,无线电高度计上的数字超过了400英尺(以客机驾驶手册一书中737-500为例), 这时可以打开水平导航LNAV模式了,机长指示副驾驶按下MCP上的LNAV按钮,

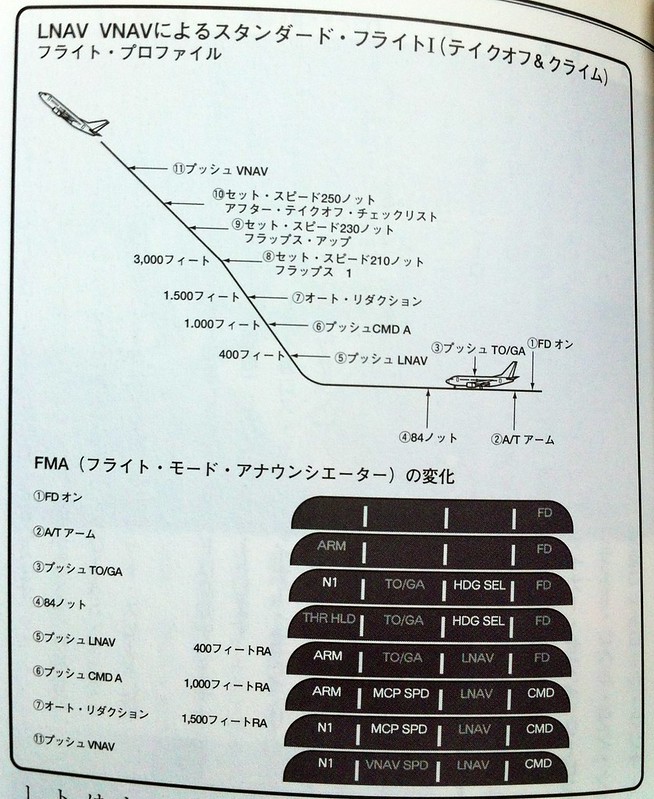
于是PFD上的左上方模式栏里方位设定由HDG SEL变为LNAV,飞行模式进入下图中的第5阶段。
LNAV 是Lateral navigation 的简称,即水平导航,可以控制飞机按照事先设定好的航路在水平面上自动飞行。 LNAV的原理首先是利用惯性导航装置IRS,即使用飞机上的激光陀螺,根据多普勒效应得到飞机的加速度, 对时间积分后可以计算出飞机当前的速度和位置,再根据地面上的无线电导航设备(VOR,DME,ILS/DME,VORTAC,TACAN等)或者GPS得到的位置数据, 飞行管理计算机FMC把所有这些数据连续的合成起来,也就是FMC把IRS的误差通过各种导航设备的数据不断进行修正,正确控制飞机在应有的航线上飞行。
MCP上LNAV键被按下后,PFD上的飞行指令条FD就会根据FMC的指示,按照事先设好的航路对飞行员进行导航。 飞行员只要按照FD操纵飞机,即使有侧风飞机也不会偏离航线。 这是因为FMC会根据天气计算出风向修正角WCA(Wind Correction Angle),WCA也会被集成到飞行指令条FD上,所以飞行员驾驶时只要专注于FD就可以了。
与此同时,油门控制模式也发生了变化,绿色的THR HLD变为了白色的ARM, 也就是说飞机升到400英尺,并且离地18秒以后,发动机自动推力锁定模式就被解除, 发动机推力进入随着爬升高度而自动减少的状态。
飞机高度超过事先决定好的机场对地高度(比如1000英尺)以后,飞行员就可以打开自动驾驶模式A/P。 737上有两台自动驾驶仪,左边的为A,右边的为B,一般来说机长会指示副驾驶使用左侧,按下MCP中右侧的A/P ENGAGE 部分的CMD A键,
 于是飞行员的手就可以脱离操纵杆或操纵盘,飞机的各个舵面的控制就都交给计算机处理了。
于是飞行员的手就可以脱离操纵杆或操纵盘,飞机的各个舵面的控制就都交给计算机处理了。这样PFD上的左上方模式栏里自动驾驶设定由FD变为绿色的CMD,同时俯仰控制部分的模式也从TO/GA 变为MCP SPD,飞行模式进入下图中的第6阶段。
MCP SPD意味着现在飞机的速度将由MCP上中央处的IAS/MACH旋钮来控制,
而飞行员将会根据飞行中不同阶段不断调整这个速度。自动驾驶模式中,飞机忠实按照CDU中输入的航路,不断转弯向下一个航路点飞去。
超过气压高度1500英尺以后,推力模式自动从减推力起飞设定转变为爬升减推力, 飞机发动机的声音也比起刚才安静了一些。 PFD上的左上方模式栏里自动推力模式从白色的ARM变为绿色的N1模式,飞行模式进入下图中的第7阶段。
TOC: 目录 Next: ATC移交离场管制,进入VNAV模式完
-
客机驾驶探秘3.4 收轮GEAR UP
下面继续以客机驾驶手册一书中的波音737-500操作手册为基础介绍飞机离地后的操作。
上一节提到机长要双脚离开脚舵只使用操纵杠或者操纵盘还控制飞机俯仰和横滚姿态。 也许你会问,左右滚转时发生的反向偏航(adverse yaw)不是得用脚舵来控制的嘛? 控制方向舵让转弯指示器的小球对中,call the ball不是很重要嘛?
关于反向偏航,当向左移动驾驶杆使航空器向左压坡度时,右侧副翼是向下的, 使右侧机翼的升力增加,因此右侧机翼的诱导阻力也增加。 其结果导致航空器向右偏航,与副翼操纵所要达到的机头偏航方向正好相反, 这种情况被称为反向偏航。 这样当向左移动驾驶杆使航空器向左压坡度时就会导致机头有向右的偏转。 这时就需要驾驶员操纵方向舵来抵消反向偏航的影响。
话说能提出这个问题说明您真是个高手啊。 确实对于小型飞机来说方向舵操作是必不可少的, 但是在现代大多数喷气客机上,一般都配备了叫做偏航阻尼器(yaw damper)的装置, 只要打开偏航阻尼器开关,在飞行中偏航阻尼系统计算机会发出反方向指令给方向舵, 使其成比例的阻尼飞机的航向,确保飞机可以按照机头的方向前进。
所以自动化程度的现代客机上,飞行员就不用分心方向舵操作, 可以集中精力于操纵盘操作从而提高飞行的安全性。
飞机的主起落架也离地以后,PFD中右下方的电波高度计(radio altimeter)的数字不断增加, 右侧的升降的垂直速度指示计的指针表示也指向上方, 气压高度表中的高度也同时逐渐上升,这说明达到了正爬升率(positive climb)的条件, 于是可以收起落架(gear up)了。
 上图为电波高度计的传统飞机和现代玻璃驾驶舱飞机的比较,传统高度计是一个指针式模拟仪表,
在现代飞机上高度值数字显示在PFD右下角决定高度DH的下方。
上图为电波高度计的传统飞机和现代玻璃驾驶舱飞机的比较,传统高度计是一个指针式模拟仪表,
在现代飞机上高度值数字显示在PFD右下角决定高度DH的下方。
此时机内喊话如下: 副驾驶: Positive climb 机长命令: Gear Up! 副驾驶指令复诵: Gear Up 并将正前方EICAS和副驾驶侧PFD中间的起落架杆拉起,移动并放至Up档位。
 上图为网上的737NG的驾驶舱照片,可以清楚看到起落架杆的外形。
上图为网上的737NG的驾驶舱照片,可以清楚看到起落架杆的外形。
此时可以听到"嗡–“的声音,液压系统开始动作,把起落架收入机体, 伴随着液压泵的运转音,过一会儿就听到轻微的咚的一声,并能感到稍许的震动, 这是起落架舱门关上的声音。 “嗡—“的液压系统音停止后,飞行员也可以在仪表盘上确认到起落架完全收起的显示。
一直暴露在机体外面的起落架收起,舱门关上以后,飞机的空气阻力一下减少, 坐在客舱内的乘客会明显感到外面的噪声变得安静了许多。
从在跑道上加速滑跑到离地爬升,收起起落架, 一共还没有超过30秒。 早早收轮正是为了让飞机尽早减轻阻力,能够更快的爬升,也减少机场周围的噪音污染。
 上图由我拍于东京国际机场羽田机场,可以看出这架波音737-800刚刚起飞离地,在跑道上方就开始收轮了。
上图由我拍于东京国际机场羽田机场,可以看出这架波音737-800刚刚起飞离地,在跑道上方就开始收轮了。
关于飞机的飞行状态,此时在飞行指令模式FD(Flight Director)下, 计算机计算出保持V2+20节的速度所需要的俯仰角度,并反映在PFD中的FD指令条, 所以飞行员只要微微调整操纵舵或操纵杆,忠实按照FD的指示进行操作。 在达到收襟翼高度FRA(flap retraction altitude)之前, 飞机将一直按照V2+20节的速度飞行。 同时飞行管理系统控制显示组件(FMS/CDU)中的页面的标题显示也会自动变为经济爬升方式"ACT ECON CLB”, 到这里起飞的操作才算完全结束。
-
客机驾驶探秘3.3 起飞离地
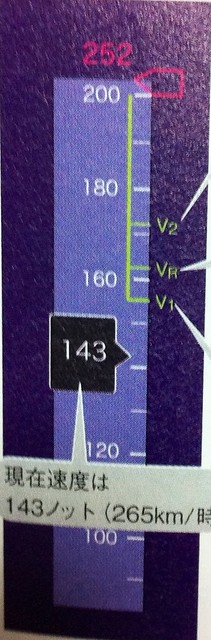
当飞机速度不断增加,PFD中左侧的速度条中会出现一个叫speed trend vector的绿色箭头,
 它表示现在飞机速度的加速度,箭头向上表明飞机处于加速状态,向下表明处于减速状态,
箭头指向的速度为10秒以后的飞机速度预测值。
飞行员通过观察speed trend vector就能知道今后飞机的速度趋向,这尤其在起飞和降落阶段对驾驶非常有帮助。
它表示现在飞机速度的加速度,箭头向上表明飞机处于加速状态,向下表明处于减速状态,
箭头指向的速度为10秒以后的飞机速度预测值。
飞行员通过观察speed trend vector就能知道今后飞机的速度趋向,这尤其在起飞和降落阶段对驾驶非常有帮助。飞机速度超过45节以后,可以看到speed trend箭头快速上升,飞机速度越来越快, 加速度在速度达到V1时达到最大值。
由于飞机处于FD(Flight Director)模式,在PFD中央自己飞机的标示上方会出现一个紫色FD指令条, 指示按照航路为了达到设定好的速度高度和航向,飞行计算机计算出当前飞机应该所处于的姿态。 飞行员应该按照FD指令条的显示,控制操纵舵或者手柄来抬机头压机头或者左右盘旋,使飞机去对准指令条,飞机就会忠实按飞行计划航行。 下图为波音737的PFD显示器示意图,紫色类似倒写的V字的那个标示就是FD指令条(flight director command bar),下面白色的倒V字型标示代表自己飞机,在下图中飞机需要执行拉起+8度抬头的操作。
 而空中客车的显示如下所示,Flight Path Director (FPD)线是计算机所给出的指令,Flight Path Vector (FPV)表明飞机处于的方位,飞行员要控制飞机使FPV处于FPD的中心。
而空中客车的显示如下所示,Flight Path Director (FPD)线是计算机所给出的指令,Flight Path Vector (FPV)表明飞机处于的方位,飞行员要控制飞机使FPV处于FPD的中心。
 是不是也许你会觉得驾驶飞机有点象玩电子游戏?当然事情没有那么简单。由于各种传感器或者系统的故障,计算机有可能会给出错误的指令,所以飞行员一定要时刻监视各种仪表,注意检查计算机发出的指令是否正确,而不能不加分析的盲目执行计算机的指令。
是不是也许你会觉得驾驶飞机有点象玩电子游戏?当然事情没有那么简单。由于各种传感器或者系统的故障,计算机有可能会给出错误的指令,所以飞行员一定要时刻监视各种仪表,注意检查计算机发出的指令是否正确,而不能不加分析的盲目执行计算机的指令。在滑行阶段,计算机的俯仰指示会一直停留在水平-10度的位置上,而当速度到达60节以后,FD指示条会移动到+15度位置,但因为还未达到Vr所以此时还不能拉杆抬起机头。
速度达到80节后,一直在观察仪表的副驾驶会报告"80",而机长仍要左手向前轻压操纵舵,双脚控制脚舵使飞机维持在跑道中央滑行。通过脚舵可以控制前轮做左右7度(波音737的数据)方向转向,因此在起飞和降落阶段的方向微调使用脚舵足够了。在地面上计算机也还不能给出水平方向上的指令,所以机长要目视外面跑道中央线,观察当前飞机是否偏离并不断调整方向。
当地面速度达到84节以后,PFD上的模式显示会变为"THR HLD,TO/GA,HDG SEL"显示,(下图中的4)
THR HLD说明发动机自动推力值被锁定,发动机将会以这个油门推力一直飞到飞机离地18秒或者飞到离地面高度400英尺,这之后才允许改变推力。THR HLD保证了起飞阶段对发动机不会因某种特殊原因突然降低油门,保障了飞机的安全性。飞机继续加速达到了起飞决断速度V1,副驾驶继续报告"V1",据说发音的规则是当速度显示到离V1还有5节是开始发音,而当说完1的时候要速度刚好显示在V1出才行。 达到V1以后,飞机即使发生故障也不能再停车而要继续完成起飞动作,因此听到副驾驶的报告后,机长必须把一直放在发动机推力杆上的右手移动到操纵舵上开始两手操纵飞机起飞,或者放在扶手上。(这之前机长要时刻准备好万一发生意外时随时可以把发动机停下来,所以右手一直放在推力杆上。V1以后为了防止错误操作油门,因此把右手移开可以提高安全性。)
紧接着抬前轮速度Vr到了。副驾驶继续报告"Vr"。机长其实这时候也一直订着仪表,并不是等到副驾驶报告以后才进行操作,而是在飞机达到Vr速度的瞬间,也就是副驾驶报告Vr的同时,向后拉起操纵舵,使机头大概以每秒3度的速率抬升,把飞机拉起至PFD中FD指示条的+15度位置。因为这个动作的时机对于起飞滑行距离有很大的影响,稍微晚一些地面滑行的距离就会增大,所以在这里飞行员的操作一定要尽可能和Vr同时进行。
 泰航的波音777前起落架离地的瞬间,上图由本人拍摄于日本名古屋中部国际机场。
我曾经在微博上问过一位飞777-300ER的国航机长砍砍而弹关于Vr,他告诉我全重起飞时其速度接近180节。
泰航的波音777前起落架离地的瞬间,上图由本人拍摄于日本名古屋中部国际机场。
我曾经在微博上问过一位飞777-300ER的国航机长砍砍而弹关于Vr,他告诉我全重起飞时其速度接近180节。机长继续保持飞机抬头姿态,与FD指示条保持一致,很快地就达到了V2速度,副驾驶再次报告"V2"。此时飞机的姿态是抬头15度俯仰角,而刚才还在跑道上滑行的位于机身下的主起落架也开始腾空离地,
 机长的双脚也可以离开脚舵,这之后的操纵就主要靠操纵舵或者操纵杆,按照FD指示的方向,上下左右平滑的驾驶飞机了。
机长的双脚也可以离开脚舵,这之后的操纵就主要靠操纵舵或者操纵杆,按照FD指示的方向,上下左右平滑的驾驶飞机了。
 东方航空公司的空中客机A330-200起飞离地,上图由本人拍摄于日本关西国际机场。
东方航空公司的空中客机A330-200起飞离地,上图由本人拍摄于日本关西国际机场。飞机在起飞和着落过程中对飞行安全影响最大的外界因素之一就是侧风。 侧风会使飞机的航迹偏离跑道中心线,在发生风切变(即风速在水平和垂直方向的突然变化,Wind shear)严重时造成飞机冲出跑道,机毁人亡的重大事故。 比较著名的因为风切变的事故包括: 1985年,美国达美航空191号班机于达拉斯-沃斯堡国际机场坠毁,造成137人死亡。 2001年,美国航空587号班机在空中突然失速,冲进纽约一个居民区,造成265人死亡。 2009年3月23日,联邦快递80号班机在日本成田国际机场降落时,因风切变坠毁,2名驾驶员遇难。 因而飞行员必须调整飞机的航向迎向侧风一定的角度,才能使飞机不致偏离跑道中心, 当侧风的风速大过一定速度时,则不能起降。
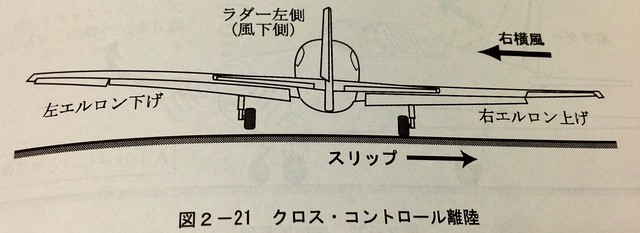
一般来说开始滑跑以后,以左侧风为例,飞行员采用cross control(侧滑法), 轻踩左脚舵,机头略朝向下风(右侧),以抵抗左侧风的风标效应; 同时左侧风使两翼产生的升力不平衡,左翼升力大,右翼升力小,为保持平衡,飞行员向左压操纵盘,控制减小左翼的升力。 因此总体上两翼升力同等,飞机基本处于平衡稳定状态,同时机首基本正对跑道中央。
下图为在右侧风情况下侧滑法操纵的说明,因此操纵方法和飞机姿态与上述相反。
但这无非是理想状态下的操作,现实中风速风向都是无时不刻变化着的, 飞行员要根据天气情况随机应变,对各种风切变即时做出灵活反应。
近日去了一趟大阪国际机场,在32L跑道头观察飞机的起降时, 拍下了某航空公司喷气式客机波音777在左侧风下起飞的一组照片。
-
客机驾驶探秘3.2 起飞滑跑
根据当天的天气和交通情况决定好起飞方式以后,终于进入正式起飞滑跑阶段。 机长把左手从转向手轮移到操纵舵上,右手还是一直放在发动机推力阀上, (波音飞机使用操纵舵,但空中客车使用的是驾驶杆,位置在飞行员外侧,如下图

 )
这时如果有侧风的话,要把操纵舵向上风方向微微倾斜,
因为受风的影响在起飞过程中飞机有偏转向下风方向的倾向,
所以为了保持航向飞行员要预先把副翼调到向相反方向调整的位置。
要注意对操纵舵的操作一定要柔和,感觉上有些类似在高速公路上驾驶汽车直线行驶时的左右微调的操作。
)
这时如果有侧风的话,要把操纵舵向上风方向微微倾斜,
因为受风的影响在起飞过程中飞机有偏转向下风方向的倾向,
所以为了保持航向飞行员要预先把副翼调到向相反方向调整的位置。
要注意对操纵舵的操作一定要柔和,感觉上有些类似在高速公路上驾驶汽车直线行驶时的左右微调的操作。飞机对准了跑道中央线后,机长再次检查PFD上的V1,Vr,V2速度显示,
 ND地图模式上航路和航点显示正常,CDU被设定到ECON CLIMB页面。
副驾驶侧的CDU则被设定到ROUTE LEGS页面。
ND地图模式上航路和航点显示正常,CDU被设定到ECON CLIMB页面。
副驾驶侧的CDU则被设定到ROUTE LEGS页面。

接下来机长把MCP左侧上部的A/T(自动推力)开关打到ARM一侧,这样推力系统就进入计算机控制模式, 从起飞开始,爬升,巡航,下降到降落全过程基本上都是飞行计算机FMC自动操作, 发动机转速N1的极限值也会被FMC所控制。同时PFD上的左上方模式栏里"ARM"文字也会被显示出来(下图中的2)
关于模式栏里各项内容的定义可以参考下图

两飞行员确认核对好ARM模式后,再次检查ND中航向方向设定是否正对跑道方向, 机长右手平滑地把推力阀加大油门向前推至转速N1 40%的位置(以通常起飞方式为例,40%的位置大概和旁边的襟翼5档位置相当), 并观察发动机状态,确认左右两侧发动机推力稳定以后,机长用右手食指按下推力筏上部的黑色TO/GA键(波音飞机)或者把油门推到TO/GA位置(空中客车)。 TO/GA的意思是Take Off/Go Around,也就是起飞/复飞时的自动推力装置,波音飞机的TO/GA键被按下后推力阀就会自动的向前方移动,并停留在FMC计算出的最适当的油门位置处(如下图)。因此飞行员既可以通过观察仪表了解发动机油门设定,也可以直观地通过直接看推力阀的位置了解当前的设定。
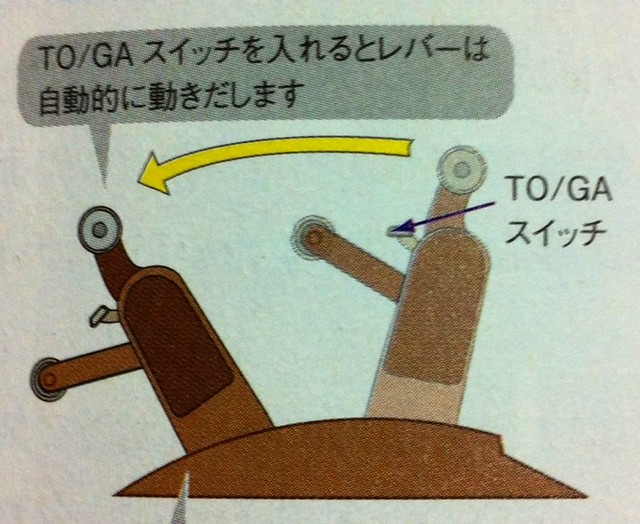
而空中客车的推力装置与波音的设计很不一样,当油门被设到FLX或者TOGA卡槽以后,推力手柄就停留在该位置保持不变,但是油门会随着计算机的自动控制而不断增加,直到起飞所需的推力。(如下图)
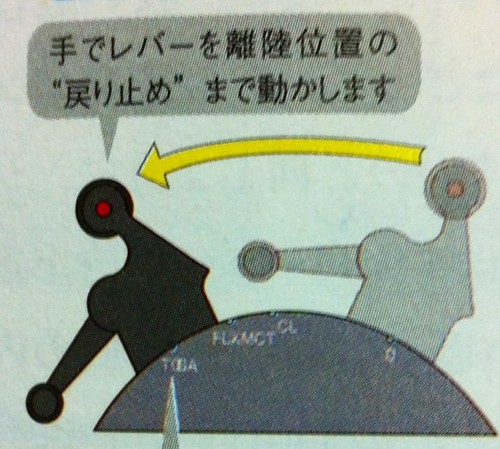 可以看到上图空中客车的推力由"0慢车",“CL爬升”,“FLX灵活/MCT最大连续推力"和"TOGA起飞复飞"几个固定档位组成。
可以看到上图空中客车的推力由"0慢车",“CL爬升”,“FLX灵活/MCT最大连续推力"和"TOGA起飞复飞"几个固定档位组成。继续以波音737为例,此时PFD上的模式显示也会变为"N1,TO/GA,HDG SEL"显示,(下图中的3)
即"自动油门推力,起飞推力,自动航向"模式,发动机的轰鸣声不断升高,飞机不断向前方滑行,不久当前速度就在PFD左边的速度栏中的方框中显示出来。
副驾驶注意监视发动机油压是否在黄色正常范围内,机长把驾驶舵稍稍向前推,防止因作用在水平尾翼的力使飞机在速度不足时早期抬头。这时候飞机马上就要接近V1速度了。
Prev: 3种起飞方式 TOC: 目录 Next: 起飞离地
完
-
客机驾驶探秘3.1 3种起飞方式
一般来说飞机有3种起飞方式,这里简单介绍一下。
Normal Takeoff Method 通常起飞方式 飞机停在跑道上,机头正对中央线,在刹车的状态下把推力阀向前推至N1 40%的位置,完成确认发动机的安定运转后送开刹车,飞机开始滑行,当飞机时速达到60节后把推力设到起飞推力。 这种方式主要用在有侧风/潮湿跑道/积有冰雪的打滑跑道等情况下,因为此时特别要注意维持机头方位的稳定,所以准备好正对跑道后再加推力的方法利于保持方向。 另外飞机性能指标中的起飞滑跑距离也是指的这种起飞方式时的数据。
Rolling Takeoff Method 连续起飞方式 飞机转弯上跑道以后不停下来,或者即使停下来也不松开刹车,推力阀向前推至N1 40%的位置,完成确认发动机的安定运转后,当飞机时速达到60节后把推力设到起飞推力。 这个方式的优点是能缩短滑跑时间,同时飞机的移动速度变化比较平稳,乘客的不适感比较少。但要注意的是在侧风或者潮湿/打滑跑道条件下这种起飞方式不太适合。 另外这种方式使用跑道距离会比较长,以及在一些特殊条件下需要更慎重操作维持机头方位操作(比如每个发动机的加速性能不一致而使达到安定状态需要较长时间,或者跑道路面比较滑等),对飞行员的要求也更高。
Static Takeoff Method 静止起飞方式 飞机停在跑道上,机头正对中央线,在刹车的状态下直接把推力设到起飞推力,确认发动机的安定运转后送开刹车。这种方式的优点是起飞滑跑距离最短,而且维持方面也比较容易,但是在比较滑的跑道上如果操作不当有冲出跑道的危险。同时它的噪音相对较大,加上加速度较大,会使乘客感到更多的不适感。另外因为发动机转速大,更容易把异物吸进而损伤发动机。
为什么所有起飞方式都要等发动机安定以后才设定到起飞推力呢? 这是因为喷气发动机虽然有重量小力量大的优点,同时它的缺点也很明显,即噪音大和不能快速提高转速,尤其是大型的涡轮风扇发动机,如果一下给油太快的话会致使异常燃烧。另外下面提到的各发动机的加速性不同,如果不等所有发动机推力稳定下来的话,飞机有可能失去平衡有冲出跑道的危险。
再介绍一下飞机从滑行道转向到跑道时的注意事项,可以看到如下图(笔者拍摄于关西国际机场)所示,地面上画有黄色的曲线指示飞机的滑行线路,一直连着跑道的中央线上,
 如果你认为和直线滑行时一样,只要让前轮沿着曲线前进就能拐上跑道中心的话,就大错特错了。
因为这条黄色曲线指示的是,如果使机身中心保持在黄色线上移动的话,就可以保证机翼和各种地面设施间的安全距离。如果真的沿着这条线起飞的话,就有可能使飞机损失掉几十米的滑跑距离。
如果你认为和直线滑行时一样,只要让前轮沿着曲线前进就能拐上跑道中心的话,就大错特错了。
因为这条黄色曲线指示的是,如果使机身中心保持在黄色线上移动的话,就可以保证机翼和各种地面设施间的安全距离。如果真的沿着这条线起飞的话,就有可能使飞机损失掉几十米的滑跑距离。


 可以看到上面照片中的波音787飞机在转向跑道时,前轮越过中央线后再转弯时进行方向调整的一瞬。
照片由笔者拍摄于大阪国际机场32L跑道头外。
可以看到上面照片中的波音787飞机在转向跑道时,前轮越过中央线后再转弯时进行方向调整的一瞬。
照片由笔者拍摄于大阪国际机场32L跑道头外。
在起飞过程中,飞机达到速度V1之前如果有意外发生的话需要停止飞行,对高速的飞机执行急刹车并使之不冲出跑道,这时的1百米距离将是非常宝贵的。飞行员在转弯上跑道时,会小心翼翼地尽量接近跑道最后部,以最长的距离来完成起飞滑跑。因此在转弯时,飞行员一般会在速度10节以下,忽略地面上的黄色曲线,尽量使飞机完成一个90度的拐弯。以波音737为例,飞行员操作转向手轮转弯时一般是通过跑道中心线5米处开始转动,并且牢牢按住手轮使前轮方向不至左右蛇行。另外因为机长作为位于机身左侧,从机长座位视线角度在跑道中心偏左位置就可以基本是飞机对准跑道中心了。
完
-
客机驾驶探秘 2.7 起飞许可
飞机在滑行过程中,副驾驶把通信频率调到塔台波段,联系塔台管制员: “Tokyo Tower, Air System 115, with you” 意思是: “东京羽田塔台,这里是Air System 115航班”, 塔台管制员回答道: “Air System 115, Tokyo Tower, Number 2” 即 “Air System 115航班,东京羽田塔台,你是第二个起飞” 于是副驾驶复诵道 “Number 2”。
客舱内乘务员们确认好乘客都已经做好了起飞准备,通过机内系统通知飞行员,驾驶舱内能听到乒的提醒声,飞行员头顶仪表板上的CALL灯会亮起。
当飞机逐渐接近道跑道口时,管制员会发出指示: “Air System 115,Taxi to Holding Position,Runway 16R” 意思是说 “Air System 115航班,请滑行到16R跑道口外并等待(也就是没有管制的许可绝不能进入跑道)” 于是副驾驶复诵 “Taxi to Holding Position, Runway 16R,Air System 115” 也就是 “滑到16R跑道外等待,Air System 115”
机长把飞机滑行到起飞跑道口外并停下,如果此时前面的飞机已经起飞,同跑道暂时也没有其他将要降落的飞机,塔台就会发来许可航班起飞的通知: “Air System 115,Fly Runway Heading, Wind 190 at 19, Cleared for Takeoff, Runway 16R” 意思是: “这里是塔台,Air System 115航班,请沿跑道航向,风向190度,风速19节,许可起飞,跑道号16R” 副驾驶复诵道: “Fly Runway,Cleared for Takeoff, Runway 16R,Air System 115” 即 “这里是Air System 115,沿跑道航向,风向190度,风速19节,许可起飞,跑道号16R”,
-
客机驾驶探秘 2.6 关于襟翼 Flap
上一节中介绍了飞机在滑行之前要预先把襟翼放到起飞位置,这是为什么呢?
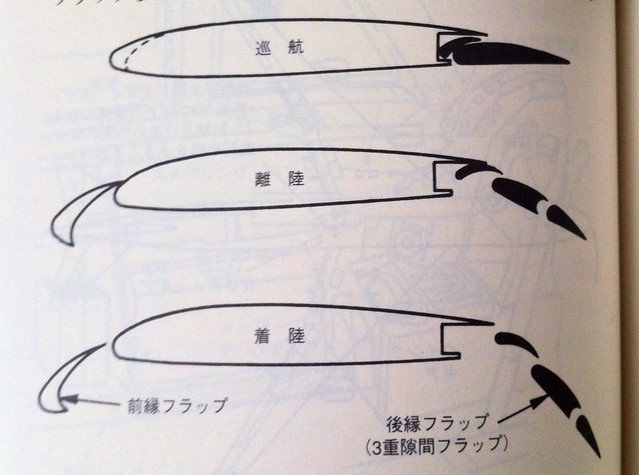
首先襟翼是装在机翼后缘或前缘,可向下偏转或(和)向后(前)滑动,用以增加升力的翼面形装置。依据所安装部位和具体作用的不同,襟翼可分为后缘襟翼、前缘襟翼。
一般来说后缘襟翼有一个缺点,就是当它向下偏转时,虽然能够增大上翼面气流的流速,从而增大升力系数,但同时也使得机翼前缘处气流的局部迎角增大,当飞机以大迎角飞行时,容易导致机翼前缘上部发生局部的气流分离,使飞机的性能变坏。如果此时采用前缘襟翼,不但可以消除机翼前缘上部的局部气流分离,改善后缘襟翼的增升效果,而且其本身也具有增升作用。
据说以往襟翼的设置是在滑行中设定的,但是滑行中飞行员既要和管制通信,还要注意四面的交通,非常之忙碌而往往会忘记设定襟翼,所以现在的飞行手册上都规定在开始滑行之前要设定好襟翼了。
襟翼的使用主要在起飞和降落时,乘坐飞机时乘客经常会注意到能听到"嗡-“的机械动作声,一般来说这就是襟翼从机翼中伸出时的声音。 如上图所示,平时巡航和在地面停留时,襟翼是收缩在机翼里的,只有在起飞和降落需要的时候才伸出来。而相对起飞降落时飞机的速度更慢,此时需要的升力也就更大,所以襟翼伸出的角度也更深。
襟翼的设置档位每个型号都不同,比如空客A330有5个档位(0,1,2,3,FULL),而波音777有6个档位(1度,5度,15度,20度,25度,30度)。襟翼这个装置非常之重,体积也大,要想快速地使之一下子全伸出来是不可能的。所以实际操作时,要根据飞机整体重量和跑道的长度,设定好所需要的档位,既快速又经济地完成起落动作。一般来说空客A330的1,2,3档用于起飞,3和FULL档用于降落;波音777的15和20档位用于起飞,25和30档位用于降落。
下图为波音777的襟翼FLAP设置杆,位置在发动机推力杆的右侧,6个档位注明了角度值:

让我们看看襟翼的实际外形。 下面这张照片我拍于关西机场,可以看到这架东航空客A330-200在准备起飞的地面滑行中,前后襟翼已经放下,而且放下的角度还是比较浅的,大概10度左右吧。
前缘襟翼放下的样子从下面这张照片的角度看上去比较容易识别,
 这是一架国泰的波音777,同样拍摄于关西国际机场。
这是一架国泰的波音777,同样拍摄于关西国际机场。下面是拍摄于广岛机场的一架波音737-800,起飞时起落架刚刚离地的一瞬间,可以看到襟翼很浅的伸出来两段。

相比较在关西机场同一天拍摄的另一架在降落时的飞机,机型为东航波音737-700,它的襟翼放下角度明显要比上面那架飞机的角度深的多,大概有30度左右。
上面2张照片是从侧面看襟翼的,让我们换一个角度来看看,下面是一架我于伊丹机场拍摄的即将落地的波音777-200型全日空客机, 从正前方看上去后缘襟翼伸出后的面积非常之大,所以保证了飞机在低速状态下也有足够的升力继续飞行,
 下面是从正后面看襟翼,可以清楚看出它伸出的角度之深,有一种接近垂直放下的感觉了。
下面是从正后面看襟翼,可以清楚看出它伸出的角度之深,有一种接近垂直放下的感觉了。

波音747的襟翼是3段的,比起777又长了一段,这是一张DreamLifter降落刚刚落地时的照片,可以看到它能够伸出的面积之大。这张照片拍摄于名古屋中部国际机场。

Prev: 地面滑行中的操作 TOC: 目录 Next: 起飞许可
完
-
客机驾驶探秘 2.5 地面滑行中的操作 Taxi
下面介绍飞行在地面上滑行时的一些操作,涉及到飞机的转弯和飞行操纵面检查。
飞机在地面上转弯时要同时使用脚舵rudder和转向手轮tiller,控制装置通过液压系统控制飞机的前轮转向,一些大型飞机如波音747/777,空中客车380的后轮也有转向装置。
在飞行前程序一节中曾经介绍过脚舵是用来操纵垂直尾翼上的方向舵,以使飞机在空中转弯,其实它同时也能控制前轮转动,所以在地面上踩脚舵就同样可以使飞机转弯了。但是脚舵控制只能使飞机以很小的角度缓慢转弯,也就是只能转个很大的弯,实际上在机场里经常需要飞机做90度的转弯,这时只靠脚舵就远远不够了,必须要使用转向手轮。
转向手轮tiller位于驾驶舵的外侧,是一个黑色的可以旋转的手柄,如下图所示,
 (这是波音737-800型飞机的照片,感谢百度贴吧berqiang先生的提供,出自于这里。
空客的手轮样子不太一样,但我手头没有好的照片)
飞行员旋转它可以让飞机做60-80度的急转弯,因此即使在狭窄的机场滑行道上,几十米宽的庞大机体还是能以几十米的转弯半径灵活的拐过一个个垂直的路口的。比如全长74米的波音777-300客机的转弯半径只有56米。注意开始使用转向手轮时一定要慢慢的转动,毕竟如客机这样的庞然大物如果突然猛打轮的话,乘客们就会感觉象坐过山车一样身体左右摇动,如果没有系好安全带的话说不好还会受伤。
(这是波音737-800型飞机的照片,感谢百度贴吧berqiang先生的提供,出自于这里。
空客的手轮样子不太一样,但我手头没有好的照片)
飞行员旋转它可以让飞机做60-80度的急转弯,因此即使在狭窄的机场滑行道上,几十米宽的庞大机体还是能以几十米的转弯半径灵活的拐过一个个垂直的路口的。比如全长74米的波音777-300客机的转弯半径只有56米。注意开始使用转向手轮时一定要慢慢的转动,毕竟如客机这样的庞然大物如果突然猛打轮的话,乘客们就会感觉象坐过山车一样身体左右摇动,如果没有系好安全带的话说不好还会受伤。

空客的转向手轮的位置和形状略有不同,是和驾驶手柄位于同一平面上,
放大看一下是这个样子的:

另外踩下脚舵的前部就会起到对前轮刹车的作用,只踩下左边的刹车时只会影响左边的车轮,只踩下右边的刹车时只会影响右边的车轮,所以转弯时使用单侧的刹车,会使飞机更容易转弯,如果此时再把外侧的发动机推力加大一些的话,更能减小转弯半径了。不过据说由于最近燃油价格高涨,为了省油飞行员们一般不用提高单侧发动机推力这一绝着了。
在滑行道中央都会画有一条黄色的中央线,飞行员要小心翼翼的使前轮踩在中心线上前进,一些庞大的飞机因为机身很高,飞行员很难看到前轮的位置,所以一般都在前起落架上装有摄像头,飞行员通过观察驾驶舱内的屏幕,使操纵滑行更加安全。当晚上的时候,中心线处会打开绿色灯光,而滑行道两侧会打开蓝色灯光为飞行员指示方向。
747-400这样的大型飞机,坐在驾驶舱里飞行员大约离地10米高,也就是相当于从4层楼的窗户的视野高度来驾驶滑行,因此很难有象驾驶汽车一样的速度感觉。所以飞行员主要通过ND显示器上的对地速度表的显示不断调节推力。
在地面滑行中飞行员还要进行飞机各操纵面的检查,通过向左右转动操纵舵(波音飞机)或者操纵杆(空客飞机)检查副翼动作,推压操纵舵或者操纵杆检查升降舵等。在驾驶舱内因为视野角度小,是不能向后直接看到各个舵面的动作的,所以飞行员主要通过观察系统显示器上的显示来进行检查。检查脚舵控制方向舵时,因为前起落架转向和方向舵使一体的,为了不使飞机在滑行道上左右拐来拐去,飞行员要抓紧转向手轮,这是因为转向手轮要比脚舵的控制级别高,同时操作时脚舵的动作会被手轮取代。

关于各个操纵面,民航资源网上的这个page的图不错,借来引用一下,供不太熟悉这方面知识的看官了解一下。

飞机通过喷气发动机向后排气获得向前进的力,而不是象汽车那样直接把动力传到车轮上。因此滑行速度就只能靠控制发动机推力和刹车来调节。在某些机场的地面并不是平坦的,所以在向上坡度的滑行道是就需要增加发动机推力维持速度,而有向下坡度时需要开慢车并刹车来降低速度。
一般在晴天干燥的跑道上,飞机的滑行速度为25节,约不到50公里/小时。当遇到雨雪天气,跑道路滑,这时就需要降低速度,尤其是转弯是更需要注意减速。
另外要注意的是在需要踩刹车控制速度是,不能踩着刹车不放,因为这样刹车盘内的温度会不断上升,刹车效果会越来越差。因此当速度低下来后就要松开刹车。
当滑行道上排着很多飞机时,飞行员会注意不要离前面的飞机太近,如果风向从正面吹来,会把前方飞机的发动机废气吸入到机舱内,这带有异味的空气会给乘客的呼吸带来不快。
滑行中机场地面管制员还会发来指令,要求飞行员把管制频率接到塔台,如 “Air System 115, contact tower 118.1” 意思是 “Air System 115, 请联系塔台118.1” 于是副驾驶员复诵道: “Air System 115, 118.1” 并把无线电台频率切换到118.1MHz上。
在客舱里,乘务员也做完安全解说,要求乘客们收起小桌板,系好安全带,收直座椅,做好起飞前的所有安全准备了。
地面滑行时机长左手要控制转向手轮,右手控制推力手柄,双脚要控制脚舵,眼睛要不断扫描各种仪表并时不时观察窗外的交通,耳朵还要时刻注意收听交通管制的指示,同时完成滑行和起飞检查单(波音737-500为例,此时要完成虚线上面部分),
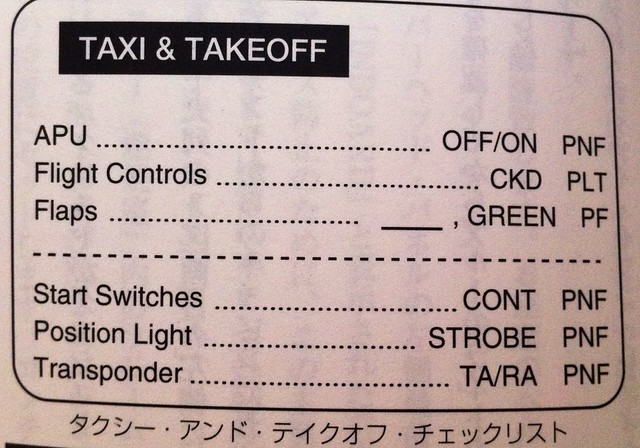 使飞机不断安全前行,逐渐来到起飞跑道前。
使飞机不断安全前行,逐渐来到起飞跑道前。Prev: 地面滑行线路 TOC: 目录 Next: 关于襟翼
完
-
客机驾驶探秘 2.4 地面滑行线路 Taxi
飞机被推车推到停机坪的尽头,机务再次与驾驶舱通话: 机务: “驾驶舱,设置停留刹车” 机长: “刹车完毕”
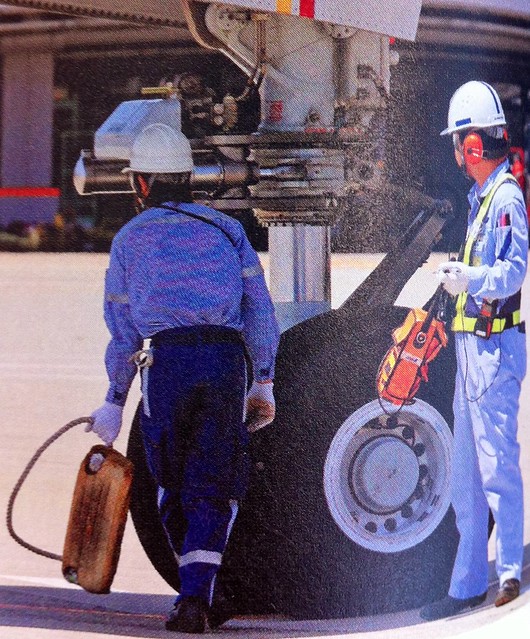
 于是机务人员把推车的牵引杆从前起落架移开,再次设置轮档,
于是机务人员把推车的牵引杆从前起落架移开,再次设置轮档,
 推车驶离飞机。
推车驶离飞机。
 (上图拍摄于名古屋中部国际机场)
(上图拍摄于名古屋中部国际机场)副驾驶员监视EICAS,确认左右发动机运转安定,向机长报告后,并执行(以波音737-500为例)启动后检查单,
 比如发动机防冻装置设定到自动档等,一切正常后机长再次与在地面上等待的机务通话,
机长: “地面,发动机起动完毕,可以解除通话电缆”
机务: “轮档移开,起落架安全插销拔除,电缆解除”
(起落架安全销用于防止意外收起起落架,当飞机在地面停留时都要插上,这样即使误操作收起起落架也不会损害飞机)
比如发动机防冻装置设定到自动档等,一切正常后机长再次与在地面上等待的机务通话,
机长: “地面,发动机起动完毕,可以解除通话电缆”
机务: “轮档移开,起落架安全插销拔除,电缆解除”
(起落架安全销用于防止意外收起起落架,当飞机在地面停留时都要插上,这样即使误操作收起起落架也不会损害飞机)移开轮档后到这里地面机务人员的工作就结束了,他们离开飞机并站成一排,挥手向即将起飞的飞机致意,飞行员也会通过飞机窗口挥手向他们的辛勤工作表达谢意。
 (上图拍摄于广岛国际机场)
(上图拍摄于广岛国际机场)飞机终于可以依靠自己的动力行走了,于是副驾驶员向机场地面管制申请: “Ground, Air System 115, request taxi” 意思是 “地面管制,这里是Air System 115,请求滑行” 地面管制员会根据机场内的拥挤情况和天气情况告诉飞机是否可以移动或者需要等待,如果没有问题,会批准飞机的滑行并告知机场的滑行的路线: “Air System 115, Taxi to Runway 16R, Via P3 J2 W2 outer” 意思是 “Air System 115, 沿P3 J2 W2 外侧滑到16R号跑道”, 飞行员于是复诵道: “Runway 16R, P3 J2 W2 outer, Air System 115” 即 “16R号跑道, P3 J2 W2 外侧, Air System 115”
-
客机驾驶探秘 2.3 客机推出停机口(PUSH BACK)并起动发动机
飞行员取得放行许可,并完成出发前5分钟的准备工作(发动机起动前程序)之后,就可以向地面管制提出申请推出,比如
飞行员: “Tokyo Ground, Air System 115, request push back, spot 2, information F” 意思是,“羽天机场地面管制,这里是Air System 115航班,请求推出,桥位2号登机口,我们有通播F(Foxtrot)的信息”
机场的地面管制员接到这一无线电请求之后会检查停机坪的交通拥挤情况,如果附近没有别的飞机的移动, 或者该航班的移动不会影响其它飞机的时候会回答到: “Air System 115, push back approved, runway 16R” 意思是,“Air System 115航班,批准推出,请使用跑道16R(Right)”
接到可以推出的命令,飞机终于可以出发了。
关于机场大屏幕上打出的每个航班的出发时间,一般人可能都认为这是飞机起飞离开地面的时刻, 其实这个时间指的是飞机离开廊桥登机口的时间,也就是飞机离开停止进入到移动状态的时间。 同样航班到达的时间也不是飞机降落到地面的时刻,而是指飞机滑行到停机位完全停止下来的时刻。
首先机长通过机内通话系统与等在地面的机务人员联系,地面人员把通话机连到机体上的接口上就可以与驾驶舱内通话。 机长:“地面,可以推出开车了” 机务:“收到。可以松开停留刹车” 机长:“刹车松开。液压泵打开” (这里引用的波音777-200的对话。777的左右主起落架各有6个轮胎,后面的两个轮胎可以靠液压控制象汽车轮一样左右转动,使777的庞大身躯在地面转弯时得到更小的转弯半径。) 机务:“收到。可以推出。” 这时负责通信的机务旁边的另外一名地面人员会把起落架前的轮档移开,如下图所示,
 于是已经连到飞机前轮处的动力强劲的推车通过下图的牵引杆,
于是已经连到飞机前轮处的动力强劲的推车通过下图的牵引杆,
 推动几百吨重的飞机,把机头朝向机场楼的飞机慢慢向后推去,
而地面机务人员也要和飞机一起向后移动。
推动几百吨重的飞机,把机头朝向机场楼的飞机慢慢向后推去,
而地面机务人员也要和飞机一起向后移动。 (上图拍摄于名古屋中部国际机场)
要注意的是在推出期间,飞行员决不能转动前轮转弯舵柄或者踩刹车,因为这样做会损坏前轮或牵引杆。
推出中飞机的移动方向要完全由推车来控制。
(上图拍摄于名古屋中部国际机场)
要注意的是在推出期间,飞行员决不能转动前轮转弯舵柄或者踩刹车,因为这样做会损坏前轮或牵引杆。
推出中飞机的移动方向要完全由推车来控制。
 推车推动飞机向后转弯,照片拍摄于广岛机场。
推车推动飞机向后转弯,照片拍摄于广岛机场。
与此同时客舱内的广播也开始,乘务员开始播报航班信息并通知乘客系好安全带。
驾驶舱内飞行员也不闲着,执行起动前检查单,(下图为波音737-500的)
 没有问题以后再次与地面通话,
机长:“地面,准备启动发动机”
机务:“收到。可以启动”
机长:“启动右侧2号发动机”
机长:“启动左侧1号发动机”
没有问题以后再次与地面通话,
机长:“地面,准备启动发动机”
机务:“收到。可以启动”
机长:“启动右侧2号发动机”
机长:“启动左侧1号发动机”
 (这是波音737-800型飞机的照片,感谢百度贴吧berqiang先生的提供,出自于这里。
(这是波音737-800型飞机的照片,感谢百度贴吧berqiang先生的提供,出自于这里。 -
客机驾驶探秘 2.2 标准离场程序SID
在上一节 出发前5分钟提到了交通管制员通知飞行员要使用Moriya7号离场程序,那么什么是离场程序呢?
飞机在空中飞行不是没有交通规则的,因为航空公司众多,尤其是大机场基本是几分钟就会有一架飞机起落。 与地面交通类似,如果没有一套交通规则进行管理,那么飞机运行将会及其危险。 因此在空中设定了很多线路,虽然不象地面的马路我们不能用肉眼直接看到这些路线,但是飞行员们必须要严格按照规定执行飞行任务。 其中为离场的飞机设置的路线和程序,叫做标准离场程序(Standard Instrument Departure),简称SID。
SID是一系列预先设定好的航路将飞机从起飞后一直引导到离场点。这个离场点就是飞行计划中航路的第一个导航点。或者说,标准离场程序就是将飞机引导出终端管制区(TMA/Terminal Control Area)的程序。上一节中提到的MORIYA离场程序的MORIYA就是离开羽田机场是的一个离场点,是位于茨城县的守谷的一个导航点。
一个机场可有很多不同的标准离场程序。每个跑道都有不同的离场程序将飞机引导到不同的离场点。至于飞机要去什么离场点,取决于飞机起飞使用的跑道方向和飞行计划中的目的地和航路。
在这套程序中包括飞机飞离机场时的航向、高度、转弯地点、时间等。管制员仅需控制飞机飞行的间隔,驾驶员按照这个程序就可以飞离机场进入航线。
离场程序由很多航路点和导航点组成。这些航路点可以以经纬度来标明,或以相对于助航设备的相对位置来标明。比如给出一个VOR的径向线和距离,就可以确定VOR附近一点。同时离场航路上还会标明爬升信息,只是飞行员在某个点爬升到或超过某个高度。
飞机到了离场点,就结束了整个离场程序。
规定标准离场程序是为了保证飞机起飞后的安全以及处理离场飞机的便捷,同时也尽可能减小飞机经过居民区上空的噪声。
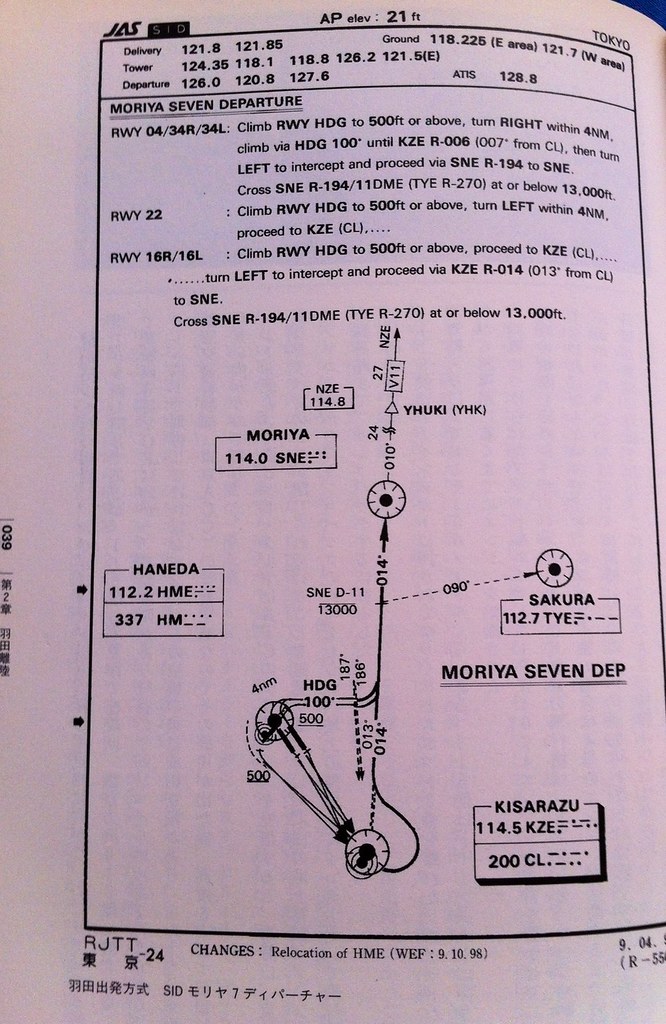
下面就看看实际的羽田机场Moriya7号离场程序的具体规定:
图的最上部列出交通管制所需要使用的各种频率,比如放行许可Delivery使用121.8和121.85MHz,地面管制使用118.25和121.7MHz,塔台使用124.35 118.1 118.8MHz等等。
图下面部分的文字部分和航图具体说明了离场程序,如从16R或者16L跑道起飞时, 首先沿跑道方向爬升到500英尺以上,并飞行到图右下角的KZE(KISARAZU木更津)导航点后, 向左拐弯以14度方向(基本接近与正北方向)向SNE(MORIYA守谷)导航点飞行。 MORIYA是一个VOR导航站。 这里图中标出在MORIYA前方11英里的地方有一个高度限制,即必须在13000英尺(约3300米)高度以下飞行。
VOR的中文叫做甚高频全向信标(VHF Omni-directional Range),是国际民航组织规定的国际标准的无线电导航设备。 飞机上的VOR接收机接受到VOR地面台发射的基准相位信号和可变相位信号,并通过比较两种信号的相位差,得出飞机相对地面VOR台的径向方位即飞机磁方位QDR,并通过指示器指示出方位信息,供飞行员确定飞机的位置并引导飞机航行。
下图是我在大阪的八尾机场拍到的八尾VOR地面站的照片,可以看出它的结构还是挺简单的。

小型飞机上的VOR指示器如下图所示,图片来源为wikipedia:
 使用时飞行员首先要把导航接收机的频率调到该VOR站的频率,如MORIYA为114.0MHz,
然后调节OBS旋钮指向想要飞行的航向,如果飞机现在正好正对着VOR站的方向,
VOR指示器上的指针就会如上图一样显示在正中央的位置。
使用时飞行员首先要把导航接收机的频率调到该VOR站的频率,如MORIYA为114.0MHz,
然后调节OBS旋钮指向想要飞行的航向,如果飞机现在正好正对着VOR站的方向,
VOR指示器上的指针就会如上图一样显示在正中央的位置。Prev: 出发前5分钟 TOC: 目录 Next: 客机推出停机口(PUSH BACK)并起动发动机
完