客机驾驶探秘
-
客机驾驶探秘6.10 关车程序
飞机完全停稳,飞行员开始执行最后的关车程序,首先设置停留刹车。
机长完全踩住脚舵前端的脚刹部分,同时把控制台后面左下方的停留刹车手柄拉起来, 于是手柄右侧的红色的停留刹车警告灯亮起,证实刹车正常, 这样机长就可以把两脚从脚舵上放下来了。
下面是波音737驾驶舱的照片,可以看到油门杆左下方的停留刹车手柄和警告灯。

副驾驶确认机长停留刹车设置好后,如果需要 APU 电源则再次检查头顶的APU电源, 证实APU 发电机汇流条电门处于接通(ON)的位置。 如果不确认好电源接通就关掉发动机电源的话,飞机内就会只有电池供电, 机舱内非常口灯光以外的照明将会全部熄灭,相信客舱内将会一片混乱吧。
如果需要外部电源的话,副驾驶将会检查地面电源可用(GRD POWER AVAILABLE)灯是否亮着。 如果这个蓝色的灯亮着就说明地面机务人员已经把地上电源接到机体上, 电源可用的话,这个蓝灯就会自动亮起。 副驾驶证实没有问题的话,则把地面电源电门接通(ON)。 不管是使用APU还是地面电源,副驾驶都需要证实源关断(SOURCE OFF)灯熄灭。
 上图,可以看到地面电源电缆已经接通。
上图,可以看到地面电源电缆已经接通。接下来需要切断(CUTOFF)发动机,副驾驶用食指和中直伸到左右起动手柄下方面, 将两个手柄同时向上拉起,然后拉到后面的停止位置。 这样发动机的燃油系统和点火系统同时被切断,发动机被关闭。
 客舱内有心的乘客此时也应该注意到,一直声音不大但嗡嗡的噪音会停下来,机内更加安静了。
客舱内有心的乘客此时也应该注意到,一直声音不大但嗡嗡的噪音会停下来,机内更加安静了。根据737的使用手册, “如果可能,在高推力工作后(包括反推),使发动机在关车前在慢车或接近慢车运行3 分钟, 以便冷却发动机的热部件。 关车前,如在滑行阶段的慢车或接近慢车的时间可以算入这3分钟内。 如果需要,发动机也可以在冷却1 分钟后关闭。 关车前的冷却时间经常少于3 分钟是不建议的。” 不过对一般的航班来说,Taxi和停靠廊桥的时间加起来一般都能满足这个条件。
下一步是副驾驶来关闭防撞灯电门。 因为发动机转动中这个灯是一直需要开着的, 防撞灯关了后,地面人员也就知道驾驶舱内的切断发动机操作完成了。 然后是关闭不需要的燃油泵电门,同样由副驾驶来操作。
接下来,对了,其实下面的操作基本就是各种开关电门,包括: ・关闭厨房电源电门 ・关闭系好安全带电门 – 这下等待中的乘客们终于可以站起来,打开行李箱门,收拾东西准备下飞机了,不过飞行员还要再忙一会儿呢。 ・关闭机翼防冰电电门(OFF) ・关闭发动机防冰电门(OFF) ・关闭电动液压泵电门(OFF) ・关闭再循环风扇电门(OFF) ・空调组件电门(AUTO) – 空调不是关闭,而是AUTO。这是因为机内还需要空调,切换到AUTO后空调由左边的组件提供,右侧组件工作停止。这样在机体右侧工作的地面人员,比如后面货物口卸货的人员,就不用在空调排出口排出的大量热气下工作了。
 ・接通发动机引气电门(ON)
・接通APU 引气电门(ON)
・轮档就位后松开停留刹车
等等。
・接通发动机引气电门(ON)
・接通APU 引气电门(ON)
・轮档就位后松开停留刹车
等等。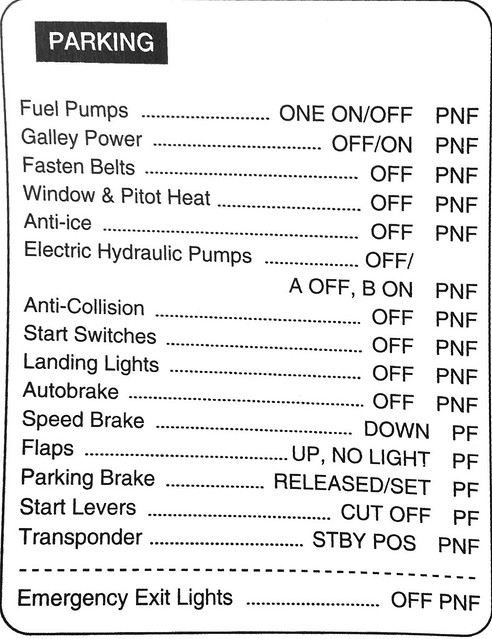 接下来机长喊话关车检查单,副驾驶执行检查单的每一项内容,
具体就不一条条解释了,可以参考上图的波音737-500型飞机的关车检查单。
接下来机长喊话关车检查单,副驾驶执行检查单的每一项内容,
具体就不一条条解释了,可以参考上图的波音737-500型飞机的关车检查单。
执行到这里,估计全部乘客也都下了飞机,客舱乘务长会来到驾驶舱向机长报告, 以及客舱内是否有何任何异常。
但是驾驶舱内的工作还没有最后完成,还有安全检查程序一项,具体还是由副驾驶操作,内容包括: 关闭惯导(IRS)方式选择器(OFF) 关闭紧急出口灯电门(OFF) 关闭风挡加温电门(OFF) 关闭空调组件(PACK)电门
-
客机驾驶探秘6.9 靠廊桥
这个系列有半年多没有更新了,真不好意思。 最近拍到几张停机坪调度员(marshaller)引导飞机靠廊桥时的照片, 虽然是登机前用iPhone拍的,但是效果还算满意,所以终于可以继续更新下去了。
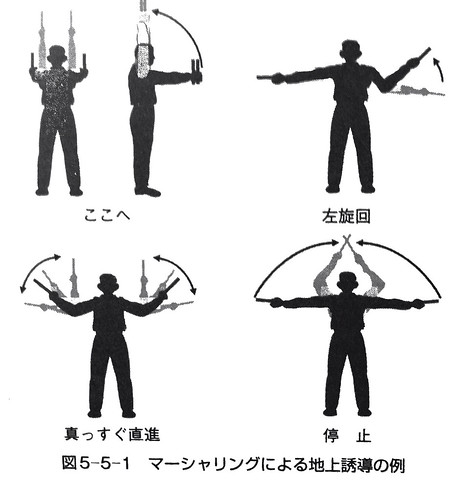
首先看一看停机坪调度员手举黄牌引导时的一些常用手势,
 从飞行员的角度看上去,
比如引导飞机向左转时,如上图右上图例所示,
调度员右臂伸平,左臂不断向上摆动,
而摆动的速度告诉飞行员需要调整转弯角速度的大小。
飞行员需要密切观察调度员的手势,配合引导的节奏,
柔和地控制转向手轮,把飞机控制在引导线(lead-in line)的正上方滑行。
从飞行员的角度看上去,
比如引导飞机向左转时,如上图右上图例所示,
调度员右臂伸平,左臂不断向上摆动,
而摆动的速度告诉飞行员需要调整转弯角速度的大小。
飞行员需要密切观察调度员的手势,配合引导的节奏,
柔和地控制转向手轮,把飞机控制在引导线(lead-in line)的正上方滑行。
下面这张照片就是停机坪调度员在引导一架A320飞机进行左转弯时拍摄的, 地点是位于大阪的关西国际机场。

根据我手头这本"旅客機操縦マニュアル(客机驾驶手册)“书中的介绍, 飞行员应该控制飞机在地面滑走速度不超过5节, 并且柔和地操作转向手轮,因为如果过猛地打轮的话, 客舱内的乘客会感觉到左右摇晃,非常不舒服, 而一个熟练的飞行员的操作则会使乘客感觉不到飞机正在地面上左右调整。
飞机转向廊桥方向以后,调度员会继续微调整其前进方向, 如下图,
 飞机前轮基本已经在引导线上了,但是还需要略向右侧调整,
因此调度员慢慢摆动右臂,引导飞机完全对正廊桥方向。
飞机前轮基本已经在引导线上了,但是还需要略向右侧调整,
因此调度员慢慢摆动右臂,引导飞机完全对正廊桥方向。飞机逐渐接近廊桥,于是调度员把双手高高举起, 左右慢慢摇动黄牌,如上面示意图的左下所示,引导飞机慢慢向前方滑行。

如果摇动的速度保持不变的话,意味着飞行员需要保持当前的速度前行, 如果摇动速度加快的话,意味着飞行员需要适度提高速度, 如果摇动速度逐渐缓慢的话,意味着速度略快,飞行员需要适度减速。 飞行员此时需要轻踩刹车,配合调度员的两臂的动作, 但是决不能使飞机停下来。 因为由于惯性,庞大的客机一旦停下来的话, 必须重新加大油门使飞机得到向前的动力, 并且在很短的距离之内,又不能速度大太, 这将是一个非常困难的操作。
随着逐渐靠近廊桥,调度员手臂摇动的速度越来越慢, 飞行员继续轻踩刹车,飞机缓缓移动前行,进入随时可以停下来的状态,
 于是调度员把两手水平伸直,并慢慢举起直到头顶,如最上面示意图的左下所示,
两手交叉时就意味着飞机了到达停止位置,
与此同时飞行员必须在同一时间踩紧刹车,防止飞机滑过停机位置。
于是调度员把两手水平伸直,并慢慢举起直到头顶,如最上面示意图的左下所示,
两手交叉时就意味着飞机了到达停止位置,
与此同时飞行员必须在同一时间踩紧刹车,防止飞机滑过停机位置。飞机停稳之后,地面机务人员会把轮档放到机轮前后, 飞行员就可以开始关车程序了。
除了人工引导以外,现在很多机场都配备了自动飞机目视泊位引导系统(Visual Docking Guidance System), 飞行员可以根据前方显示屏的指示,控制飞机滑入停泊位。

目视泊位引导系统由显示屏和一个测量飞机距离的激光扫描器组成。 系统能够检测并分析出飞机的型号,使用激光跟踪飞机位置,并把结果显示在屏幕之上。 显示屏上的信息主要包括: 机型 偏离中心滑行线信息 距离停机位的距离
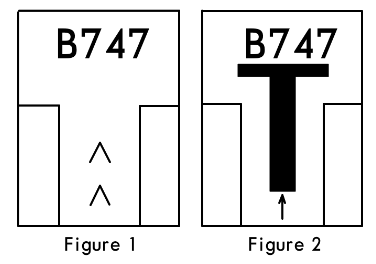
当地面操作人员通过手动控制面板完成输入和检查完机型信息以后, 系统即可启动自检并开始不断扫描。 还没有检测到接近飞机时,屏幕上部会显示出机型信息,下部会显示出不断向上移动的黄色箭头, 如下图Figure 1所示,
 飞行员在滑进登机口时,根据这个信号可得知系统已激活并等待着他的飞机,
于是飞行员就开始操纵飞机完成滑入操作。
飞行员在滑进登机口时,根据这个信号可得知系统已激活并等待着他的飞机,
于是飞行员就开始操纵飞机完成滑入操作。当激光探测到接近中的飞机,系统开始在屏幕中部显示一个T字形的标志, T字下面有一个小的指向上方的小箭头,如上图Figure 2中所示。
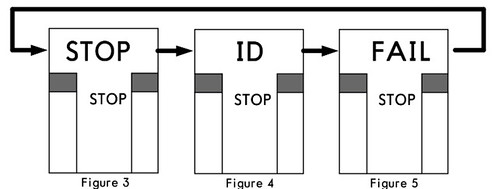
当飞机接近距离停止位12米之处,系统开始识别飞机型号是否与实现输入的型号相符。 如果信息一致的话,系统会继续进行引导。 但如果系统发现信息不符,屏幕上部会连续交替显示出STOP-ID-FAIL出错信息, 同时屏幕中间处会显示出两个红色方块警告信息。
 看到此信息后,此时飞行员必须立即停止飞机的前进。
看到此信息后,此时飞行员必须立即停止飞机的前进。 -
客机驾驶探秘6.8 着陆后程序
上一节写到飞机把地面速度减到10节以下,准备脱离现有跑道, 这时从塔台也应该发来滑行至登机口的路线指示了, 继续以Air System 115航班为例: 塔台 “Air System 115,Turn Right B9,Taxi Down Runway 19L,A10” 飞行员 “Right,B9,Taxi Down Runway 19L,A10,Air System 115” 这里的滑行路线为从B9出口右转,沿19L跑道滑走到A10出口。
紧接着塔台再次通知,要求飞机联系机场地面管制,其频率为121.6MHz: 塔台 “Air System 115,Contact Ground 121.6” 飞行员 “121.6,Air System 115”
飞行员接下来调整无线电频率到121.6MHz,并联系地面管制道: 飞行员 “Chitose Ground,Air System 115,A10,Spot 16” 地面管制 “Air System 115,Ground, Taxi to Spot 16 Via H6, T2” 在这里地面给了飞行员到16号停机口的路线是从A10,经过H6和T2出口, 于是飞行员复诵该路线, “H6, T2 to Spot 16, Air System 115” 到这里,本次航班的空管通话基本就结束了。
飞机在地面滑行时的操作方法在2.5 地面滑行中的操作里已经作过说明, 这里就不再重复,而是具体总结一下着陆后程序。
首先是机长移动减速板手柄的位置到下卡(DOWN),于是机翼上的立着的减速板被放下。
当机长喊话放下减速板手柄以后,副驾驶开始执行自己一侧的操作, 具体如下: 收上襟翼手柄到UP位置;
-
客机驾驶探秘6.7 着陆操作
飞机沿下滑道不断下降,飞行员继续监控自动飞行操纵系统AFDS的状态, 当达到500英尺无线电高度RA时,副驾驶读出当前数值: “500,Vref+5, Sink700”。
这里的"500"指的是500英尺AFE(高于机场标高,Above Field Elevation), 在人口密集地带以外的最低安全高度(Minimum Safe Altitudes)规定为500英尺, 因此500英尺这个高度是一个非常重要的指标。 “Vref+5"指的是当前速度正好为襟翼30度时的基准速度加上5节, 关于Vref的设置在5.2 进仅简令一节里有过说明。 “Sink 700"指的是当前垂直方向的下降率为700英尺/分。 在1000英尺AFE高度以下时,规定飞机的下降率要在1000英尺以下, 当前700的数据是没有问题的。
400英尺高度以后,飞机的水平尾翼配平开始自动向后转动起来, 飞机的高度,俯仰姿态虽然仍然保持不变, 但是自动飞行系统已经开始为落地前的拉平开始做准备了。
接下来飞机逐渐接近决断高度DA,副驾驶喊话道:“Approaching Minimun”, 机长喊话回答到"Checked”。 紧接着飞机达到了决断高度,副驾驶会喊话:“Minimun”, 如果此时能见度没有问题,机长喊话"Landing”, 表明飞机接下来会继续完成着陆滑跑程序。
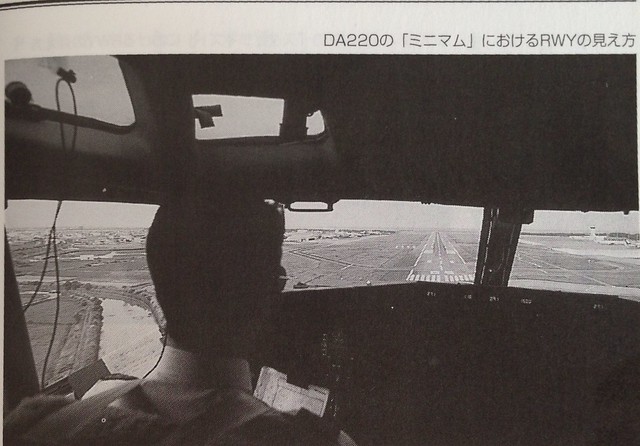 上图为DA220高度从驾驶舱角度看跑道时的照片。
上图为DA220高度从驾驶舱角度看跑道时的照片。如果飞行员在决断高度上还看不清楚跑道的话,机长喊话"Go Around", 机组必须马上执行上一节中介绍过的复飞程序。
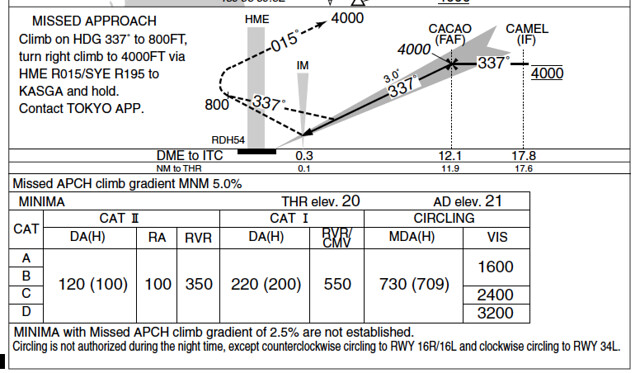 以上图东京国际机场34L跑道仪表着陆系统ILS的进近为例,
一类标准为决断高度DA不低于220英尺,跑道视程RVR不小于550英尺;
二类标准为决断高度DA不低于120英尺,跑道视程RVR不小于350英尺。
具备二类标准的跑道,航空公司,飞机需要比一类更高的维护能力和严格要求,
同时飞行员也需要具备相应资格才可以运行二类盲降。
以上图东京国际机场34L跑道仪表着陆系统ILS的进近为例,
一类标准为决断高度DA不低于220英尺,跑道视程RVR不小于550英尺;
二类标准为决断高度DA不低于120英尺,跑道视程RVR不小于350英尺。
具备二类标准的跑道,航空公司,飞机需要比一类更高的维护能力和严格要求,
同时飞行员也需要具备相应资格才可以运行二类盲降。
根据着陆滑跑程序,一般来说飞行员需要断开自动驾驶,由人工手动驾驶飞机, 但是具体从什么高度开始,从哪个阶段开始,好像并没有一个特别的标准, 很多时候是靠飞行员自己的喜好和习惯来决定的。 我手头的资料是这样介绍的(以波音737-500为例), 在DA减去50高度,以东京国际机场的例子来说就是在170英尺之前, 飞行员需要断开自动推力和自动驾驶仪,亲自执行着陆操作。
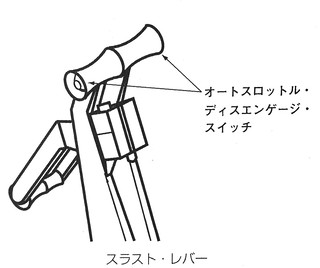 上图:推力手柄和断开自动推力开关的位置
上图:推力手柄和断开自动推力开关的位置
 上图左上箭头处的按钮:切断自动驾驶仪开关(autopilot disengage)
上图左上箭头处的按钮:切断自动驾驶仪开关(autopilot disengage)
无线电高度RA达到100英尺,与无线电高度计连动的近地警告系統(GPWS, Ground Proximity Warning System) 自动发出电子警告音,不断报出当前高度: “One Hundard” “Fify” “Forty” “Thirty” “Twenty” “Ten”
飞机飞过跑道端(runway threshold)时的高度应该为RA50英尺, 在这以前飞机要保持3度的下滑角不变。 50英尺以后,开始执行拉起操作,飞机下降率逐渐降低, 飞机的拉平(Flare)在起落架离地15英尺高度时开始, 机体的俯仰姿态达到上仰3度,这样就可以使飞机在接地(touch down) 时达到目标的150英尺/分的下降率。 同时飞行员在拉平的同时要逐渐平滑地减小发动机推力, 使飞机在接地的瞬间要正好达到慢车状态。
-
客机驾驶探秘6.6 复飞
飞机降落之前,如果发生一些意外情况,使机组人员判断继续下降着陆的话会有安全问题的话, 飞行员必须果断执行复飞(Go Around)程序。
这些情况包括:
- 到达决定高度DH(精密进近)/MAPT(非精密进近)以后,仍然看不到跑道和指示灯,不能建立所须目视参考
- 记载设备或者地面导航设备发生故障,不能提供正常的导航精度
- 着陆过程中跑道视程不能满足着陆要求,如平流雾的影响。平流雾(advection fog)是暖湿空气移到较冷的陆地或水面时,因下部冷却而形成的雾。通常发生在冬季,持续时间一般较长,范围大,雾较浓,厚度较大,有时可达几百米。
- 侧风或逆风过大时
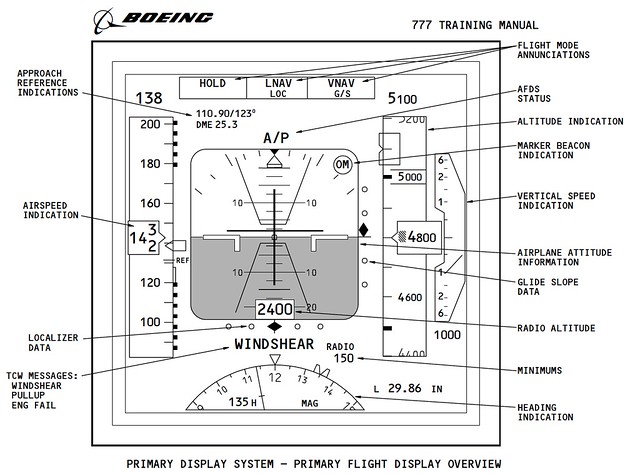
- 进近中出现风切变警告时。现代客机一般都装备了风切变探测警报系统,如果飞机突然开始强烈颠簸,风向、风速明显变化,驾驶舱内风切变探测警报会响起,语音提示"WIND SHEAR, GO AROUND(风切变,复飞),主飞行显示器PFD显示器上也会现实出WINDSHEAR的警告文字
- 空中管制员发出复飞指令时
- 跑道上有其他飞机或者地面车辆等,存在相撞危险时 等等。
复飞的航线在5.4 仪表进近图一节里总结过,这里就不再重复了。
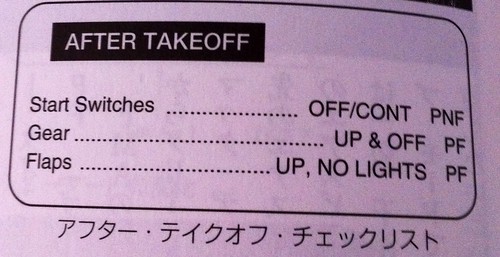
复飞程序以波音737为例,概要如下: 机长按下发动机的TO/GA电门,并喊话"襟翼15"; 副驾驶把襟翼手柄设置于15档位,并观察验证襟翼是否正常收起到15; 飞机的状态开始从下降转变为抬头的复飞姿态; 发动机推力增加并且确认推力足够用于复飞; 证实高度表上的正上升率,机长喊话收起落架; 副驾驶收起起落架手柄; 副驾驶检查MCP上设置好的复飞高度无误; 当飞机高度高于400英尺后,可以执行横滚转弯,进入复飞航路; 按照收襟翼速度计划表继续收起襟翼; 可以起动垂直导航VNAV; 发动机模式设置为上升推力; 执行起飞后检查单。
飞机上升到失误进近(missed approach)航线中规定的高度以后,需要进入等待程序,
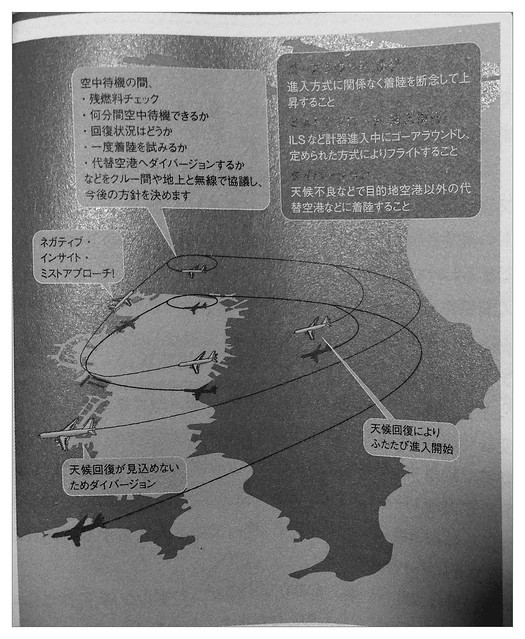 在等待之中,飞行员需要检查剩余燃料量,估算可能的待机时间,
如果是因为天气条件恶劣的复飞,需要检查天气恢复的情况,
判断天气条件允许的话是否进行再次降落的常识,如果天气没有改善的迹象,
那么就需要执行备降程序,飞向事先准备好的备降机场。
不管是再次降落还是飞往备降地,都需要事先得到空中管制的许可,
这同样需要消费时间,因此飞行员必须把等待中的燃油消耗也考虑进去。
在等待之中,飞行员需要检查剩余燃料量,估算可能的待机时间,
如果是因为天气条件恶劣的复飞,需要检查天气恢复的情况,
判断天气条件允许的话是否进行再次降落的常识,如果天气没有改善的迹象,
那么就需要执行备降程序,飞向事先准备好的备降机场。
不管是再次降落还是飞往备降地,都需要事先得到空中管制的许可,
这同样需要消费时间,因此飞行员必须把等待中的燃油消耗也考虑进去。写到这里,想起自己乘坐飞机的一次经历,包括了复飞和备降, 而最后还是飞回了目的地,可也算是一个难得的经验了。
那是某一年去美国出差,回程坐美国航空公司的波音777从加州的圣荷塞回东京, 飞机接近成田机场后因风大,机体摇晃个不停。 后来飞机慢慢在不断下降的时候,突然感到发动机声大作, 飞机又开始爬升,这才知道由于风太大,飞行员决定中断着陆而复飞了。 飞机在空中盘旋了一段时间后,机内广播说成田机场天气条件不允许降落,航班有可能要备降到名古屋。 但是又等待了一会儿后,再次广播说备降羽田机场,估计是机内燃料已经飞不到名古屋了。 从成田到羽田倒是近的很,感觉十多分钟左右就降落下来了。 到了羽田以后也不能下飞机,停到停机坪某处加油,然后就是等待成田机场的天气回复, 大概在羽田机场呆了1个多小时以后,终于得到消息可以返回,于是再次排队起飞, 最后比原定时间晚点3个半小时后终于成功降落到成田机场。 当然当天能够回家,不用在名古屋过夜已经是谢天谢地了。
总之复飞是保证飞行安全的措施之一,是进近着陆过程中不可分割的部分, 是防止进近失误的一种方法,也是处置紧急情况的一条重要措施。 复飞并不可怕,按程序进行复飞不会有任何危险, 民航飞机都预先设定了复飞程序,这是一个很基本的飞行操作程序。 同时飞行员在进近着陆过程,特别是在接近DH(MDH)时,必须有随时转入复飞的决断意识, 在恶劣天气(积雨云和浓积云,阵发性大雨或暴雨,强烈阵风等)下决不能心存侥幸心理, 不符合着陆条件时需要当机立断做出复飞决定。
下面这段视频拍下了飞机在大雨中复飞的实况,很有参考价值。
完
-
客机驾驶探秘6.5 降落程序
飞行员执行的降落程序其实已经从6.3节里介绍过的盲降系统设置开始了, 本节里将总结其余的操作。
飞行员首先会通知客舱服务员准备着陆,要求乘客们收起小桌板,系好安全带,收直座椅,做好着陆前的所有安全准备。 下一步机长根据放襟翼计划表喊话设置襟翼,副驾驶按指令设置襟翼手柄,并监控襟翼和缝翼是否正确放出。
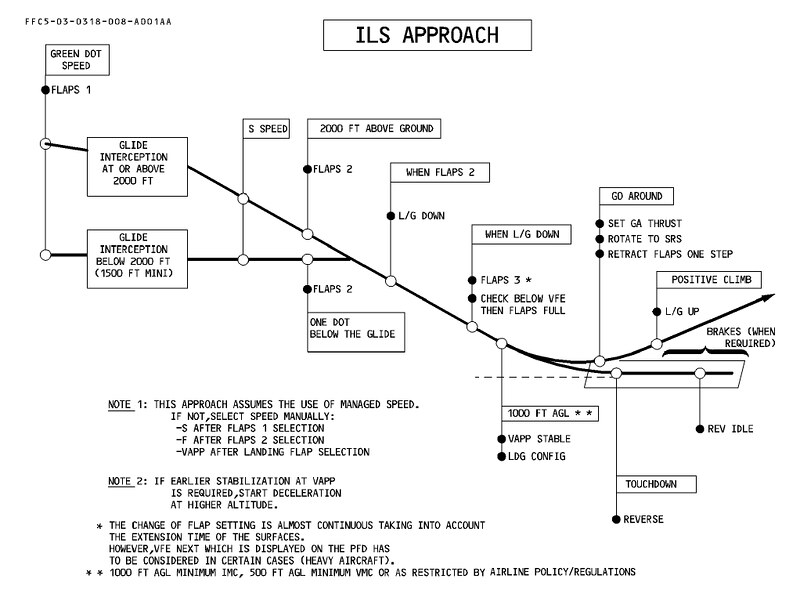
放下襟翼的计划可以参考下面空中客车A340使用手册里的这份资料, 下滑道截获前被设置在档位1,下滑道被截获后下降到2000英尺高度时设置到档位2, 之后是放下起落架,然后襟翼被设置到档位3,并且当速度降到Vref基准速度之下以后设置到档位FULL。
通过下面的两张照片可以看到下滑道截获前后的襟翼位置, 这是我乘坐空客A320飞往东京羽田国际机场时拍摄的。 当时的进近跑道是ILS Zulu 34L,下滑道截获前的襟翼位置在15度,此时飞机在千叶上空。

对准跑道方向下滑道截获后,襟翼位置放下至20度,此时飞机飞行在东京湾上空。

在2.6节介绍过襟翼的设置档位空客和波音公司的定义不同,比如空客A330有5个档位(0,1,2,3,FULL),而波音777有6个档位(1度,5度,15度,20度,25度,30度)。
这里继续以波音737-500为例总结以下降落程序。 在下滑道截获前,放下襟翼至档位5,然后放下起落架手柄,绿色起落架指示灯亮起后, 将襟翼手柄置于15,同时将发动机起动电门(Start Switches)设置到连续CONT位。 接下来回顾(Recall)和复查防眩板(Glare Shield)下MCP右侧旁边的系统报警牌(System annunciator), 还要将减速板手柄(Speedbrake Lever)设定到干预ARM位并检查减速板预位SPEED BRAKE ARMED灯亮起。 下滑道截获后,继续根据襟翼计划表设置需要的档位,并在MCP上设置复飞高度。 紧接着机长开始下口令着陆检查单,副驾驶执行下面的着陆检查单:

下面具体看看降落程序中需要的每个控制器和仪表操控。
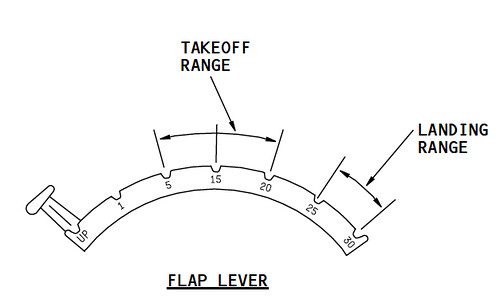
襟翼设置杆(Flap Lever)

737的襟翼设置杆(Flap Lever)的档位侧面示意图。
可以看到每个档位都有一个槽位存在,操作襟翼设置时,飞行员要用手指抓住设置杆头部,
将其向上拉起来,然后把设置杆移动到需要设置到的档位上,松手以后设置杆就会卡进该档位之内了。系统报警牌(System annunciator),为下图中黑框内的部分,既可按下也是指示灯。
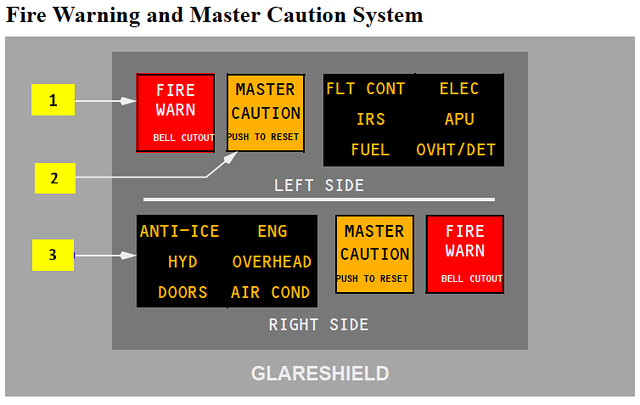 当机上的某子系统发生故障时,报警牌里的表示相关系统的小灯就会亮起,为飞行员提供警报。
回顾复查操作时,按下电门,报警牌里的所有小灯和旁边的总报警MASTER CAUTION灯就会全部亮起,
表明总报警系统和每个单独故障系统都工作正常。
当机上的某子系统发生故障时,报警牌里的表示相关系统的小灯就会亮起,为飞行员提供警报。
回顾复查操作时,按下电门,报警牌里的所有小灯和旁边的总报警MASTER CAUTION灯就会全部亮起,
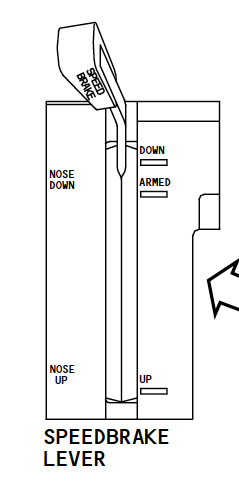
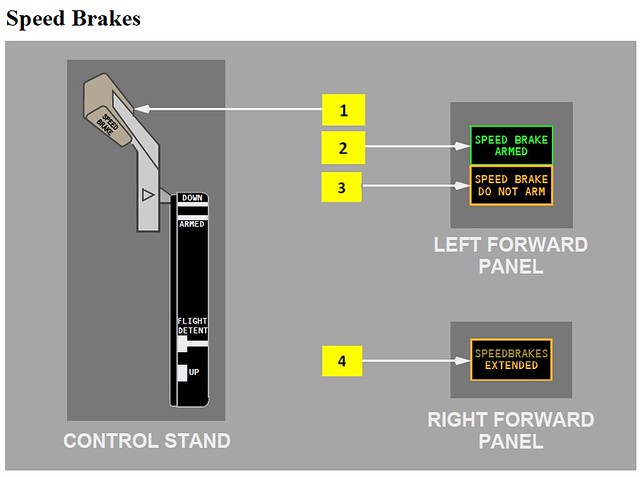
表明总报警系统和每个单独故障系统都工作正常。减速板手柄(Speedbrake Lever)位于油门手柄的左侧,是个向左侧伸出的手柄。
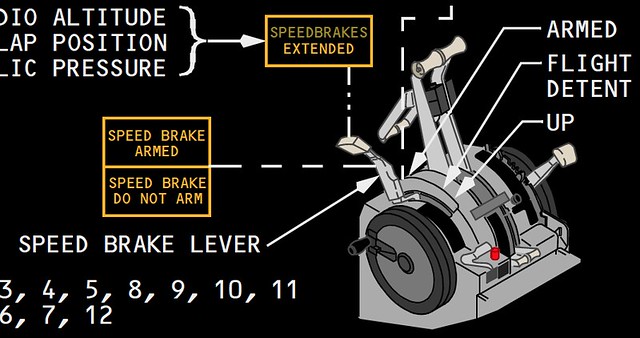
把减速板手柄从放下(Down)的位置设置到干预(ARM)位后,旁边的SPEED BRAKE ARMED灯亮就会亮起来,如下图所示。
 ARMED位置意味着自动减速系统被起动,这样的话当飞机一降落到跑道后(touch down),
减速板手柄就会自动地被移动到"UP"位置,于是内侧和外侧的减速板会被自动地打开到最大位置,如下图所示。
ARMED位置意味着自动减速系统被起动,这样的话当飞机一降落到跑道后(touch down),
减速板手柄就会自动地被移动到"UP"位置,于是内侧和外侧的减速板会被自动地打开到最大位置,如下图所示。

起落架杆位于EICAS和副驾驶侧PFD中间,手柄头是个轮胎的形状,很好识别。
 把起落架杆从UP状态拉下至DN,杆上方的绿色起落架指示灯就会亮起。
把起落架杆从UP状态拉下至DN,杆上方的绿色起落架指示灯就会亮起。
 看上图可以知道前方起落架和后方两个主起落架灯是分开来的,
如果某个发生故障,看下指示灯就会知道是哪个了。
看上图可以知道前方起落架和后方两个主起落架灯是分开来的,
如果某个发生故障,看下指示灯就会知道是哪个了。着陆检查单完毕,同时飞机也在追踪着ILS的下滑道不断降低着高度, 垂直方向上的下降率大约维持在700英尺/分上;空速同时也需要不断减低, 飞行员会在MCP上继续设置目标速度,随之不断把襟翼放下,比如如果决定本次降落使用襟翼30的话, 就会最终把速度设定到Vref30+5上,比如133节。 当PFD上的ILS显示处飞机确实锁定了下滑道后,飞行员就会把复飞高度比如4500英尺设定到MCP上的高度目标上。 复飞(go around)指飞机在下降着陆过程中,遇到某种特殊情况时,立即中止下滑着陆,重新转入正常上升状态的过程。
-
客机驾驶探秘6.4 起落航线
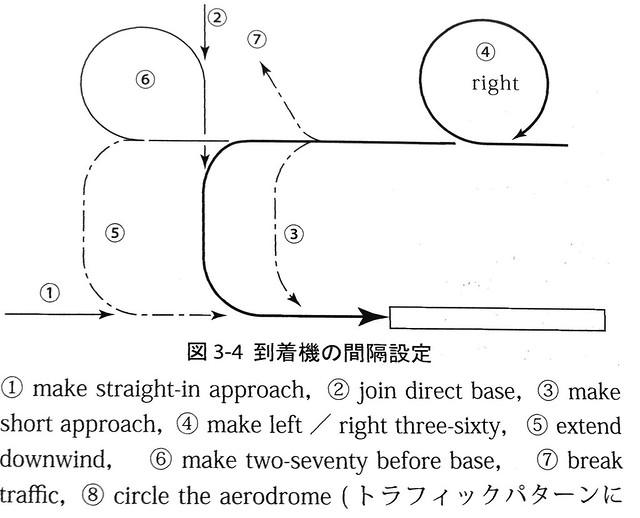
起落航线(traffic pattern, 也叫五边飞行)定义了在机场进行起飞着陆的航空器所规定的交通流程, 这条航线相对于跑道飞一个矩形航线,并且是在特定的高度上, 它使得飞行员能够寻找和预料到其他在机场附近飞行的飞行员的位置。 起落航线也是训练飞行员的一种重要课程,飞行员可从五边飞行中学习起飞、爬升、转向、平飞、下降及降落等重要飞行技巧。
起落航线有五个主要的边: 一边(离场边,Departure,或者Upwind) 二边(侧风边,Cross-wind leg) 三边(下风边,Downwind leg) 四边(基线边,Base leg) 五边(最后进近,Final Approach)
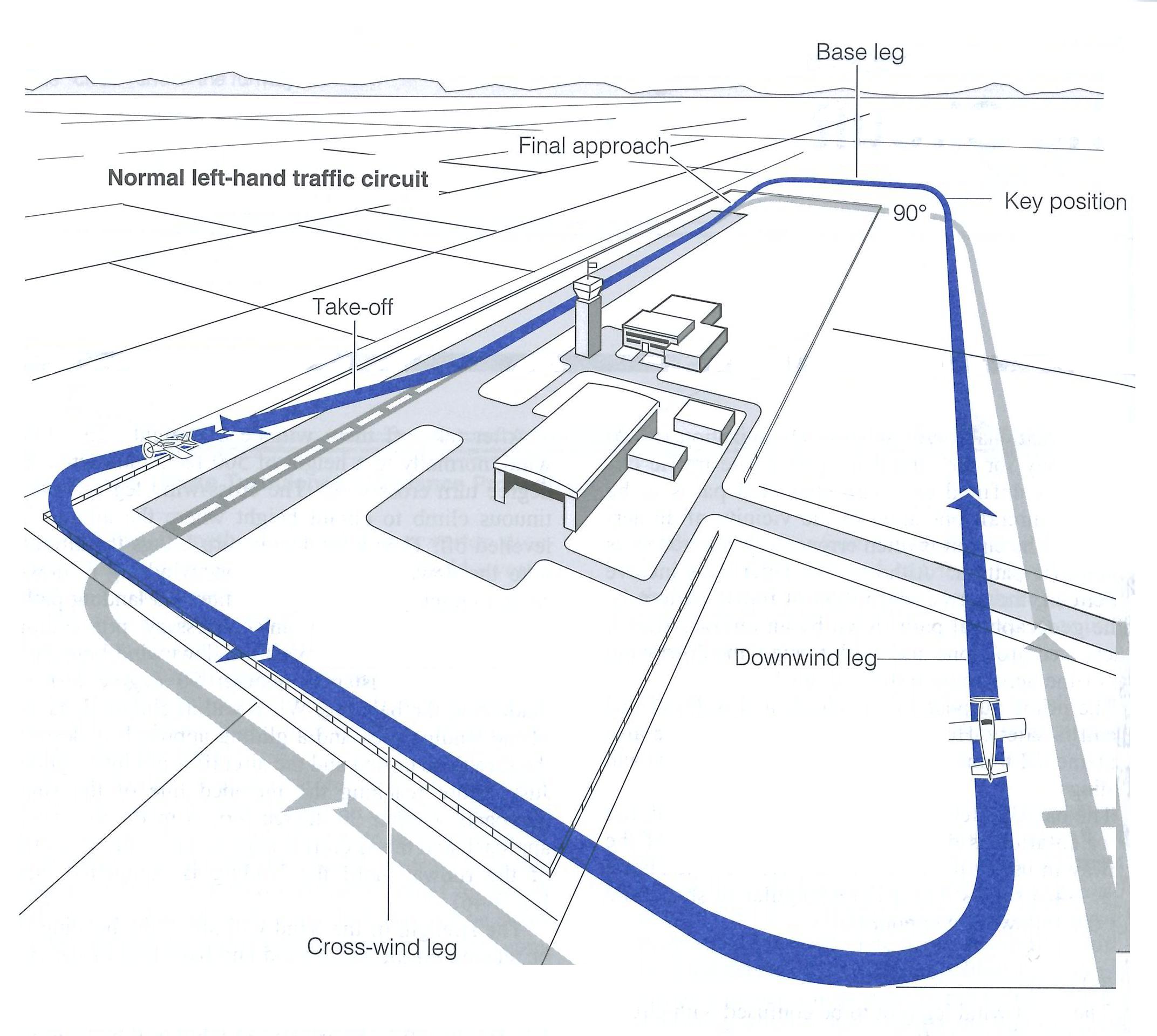
根据飞机在航线上转弯的方向,又可以把起落航线分为左起落航线
和右起落航线
机场的起落航线通常为左航线; 若因地形、城市等条件的限制,或者为避免同邻近机场的起落航线交叉,也可以为右航线; 起落航线的飞行高度,通常为300米至500米。
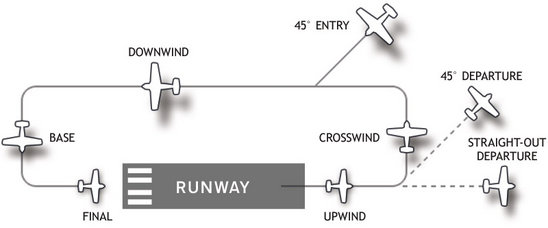
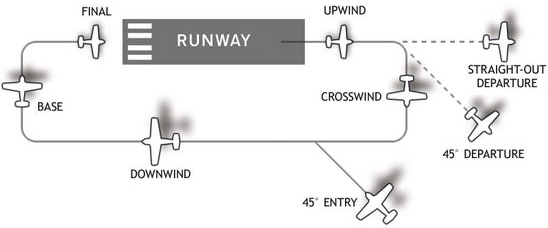
从上面的图可以知道,飞机起飞离场时,一般可以在一边上采取直线离场(straight out departure), 或者45度转弯(45° departure )离开一边的方式。 降落时飞机一般从3边以45度角切入起落航线(上图的45° entry)。 当然,飞机飞离机场加入航路、航线和脱离航路、航线飞向机场, 应当按照该机场使用细则或者进离场程序规定的航线和高度上升或者下降。 加入起落航线飞行必须经空中交通管制员许可,并且应当顺沿航线加入,不得横向截入。
使用ILS盲降的飞机在降落时一般来说只要沿着跑道方向, 切入航向台保持直线方向进入第五边就可以了,这叫做straight-in ILS approach。
但是如果机场内跑道的ILS天线只装备了一侧,那么反方向降落时该怎么办呢? 此时可以采用Circling Approach的方法。 目视盘旋进近(Circling Approach)是紧接最后进近的仪表飞行之后, 在着陆前围绕机场所进行的目视机动飞行,(沿与起落航线相一致的目视盘旋航线着陆)。 作为一种独立的进近方式,它广泛存各机场的进近程序中。

对于起落航线上的降落飞机,有时需要根据交通量的拥挤程度, 空中交通管制员会对飞行员进行各种间隔指示。 飞行员接到命令以后,必须改变正常的航路,根据具体的指令改变飞行路线。 这些指示包括以下几种: 1 straight-in approach 直接进场 2 join direct base 直接沿4边进入起落航线 3 make short approach 短进场,尽量减少3边上的飞行距离,也就是指示飞机尽早降落 4 make left/right three sixty 在三边上左转或者右转一圈(360度)。因为4边5边上有正在起落的飞机,使之在三边上等待一段时间 5 extend downwind 延长3边,这也是使飞机等待的一种方法 6 make two-seventy before base 在进入4边之前绕3/4圈(270度)再正常进入4边。另一种等待方式 7 break traffic 退出起落航线。因为此时不具备降落的条件 8 circle the aerodrome 继续在起落航线上绕机场一圈。这是一种更长时间的等待方式
-
客机驾驶探秘6.3 最后进近定位点和仪表着陆系统设置
6.1节里写到了飞机经过中间进近定位点IF(Intermediate Fix),进入平飞的状态。 这一节里写一下从IF向最后的进近定位点Final Approach Fix (FAF)飞行的过程中的操作。 IF和FAF的关系在5.4节里介绍过,这里再复习一下。
在CDU的NAV/RAD导航设置页面上,检查所输入数据无误, 比如降落跑道的方位角为128度,无线频率为110.90MHz。 下图为波音777的CUD显示示意图。

根据放襟翼计划设置襟翼手柄,如"Flap 5",并监控襟翼和缝翼的放出。
ATC这时也应该交接到塔台管制了, 继续以东京羽田机场到北海道扎幌新千岁机场的AirSystem115航班为例说明。
“进近管制: Air System 115,4 Miles south Hayakita,Contact Tower 118.8 飞行员: Contact Tower 118.8,Air System 115”
飞行员调节通话频率至118.8MHz,并联系塔台, “飞行员: Chitose Tower,Air System 115,2 Miles to Hayakita,Spot 16 塔台: Air System,Tower,Roger,Report Depart Hayakita,Runway 19L,Wind 220 at 12 飞行员: Check Depart Hayakita,19L,Air System 115” 塔台要求飞行员在飞过Hayakita报告点后再次联系。
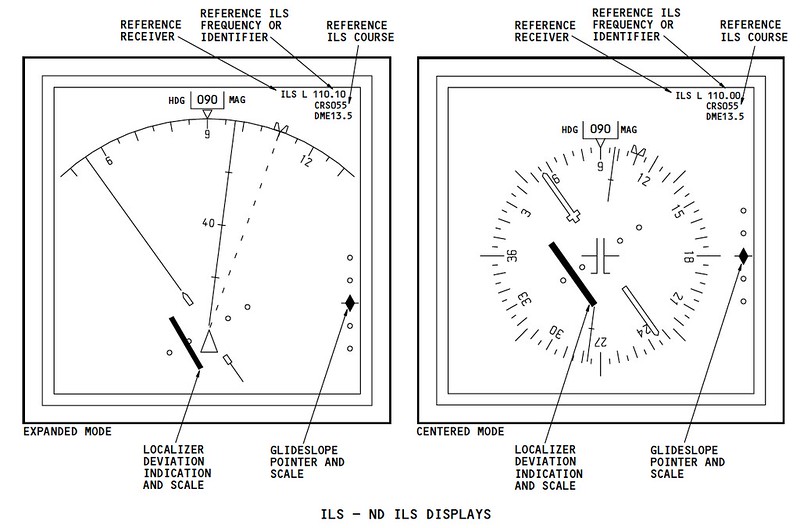
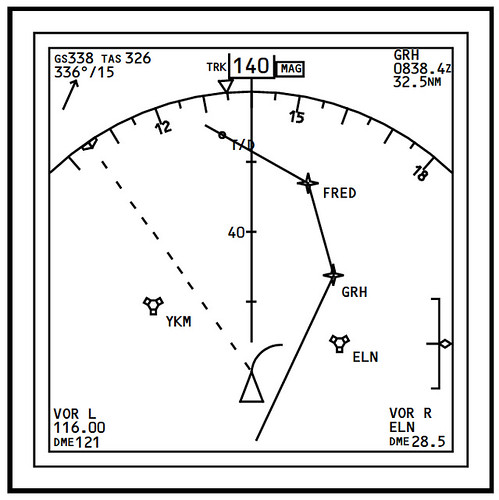
此时ND上的下滑道和航道指针应该被显示出来。
飞过Hayakita后,飞行员联系塔台,塔台要求飞行员进入4边后再次联系。 “飞行员: Chitose Tower,Air System,Depart Hayakita 塔台: Air System 115,Roger, Report Base, Runway 19L, You are No.1, No Traffic 飞行员: Report Base, 19L, We are No. 1, Air System 115”
-
客机驾驶探秘6.2 降落辅助系统
降落辅助系统包括所谓的盲降系统,即仪表着陆系统 ILS (Instrument Landing System), 还有精密进近航道指示器PAPI(Precision approach path indicator)。 另外机场跑道附近还经常可以看到用于测量跑道视程RVR的透光仪。 作为个人体验,旅游探亲或者出差需要坐飞机时,因为能够认出机场里各种设备,旅程乐趣也会大为提高。
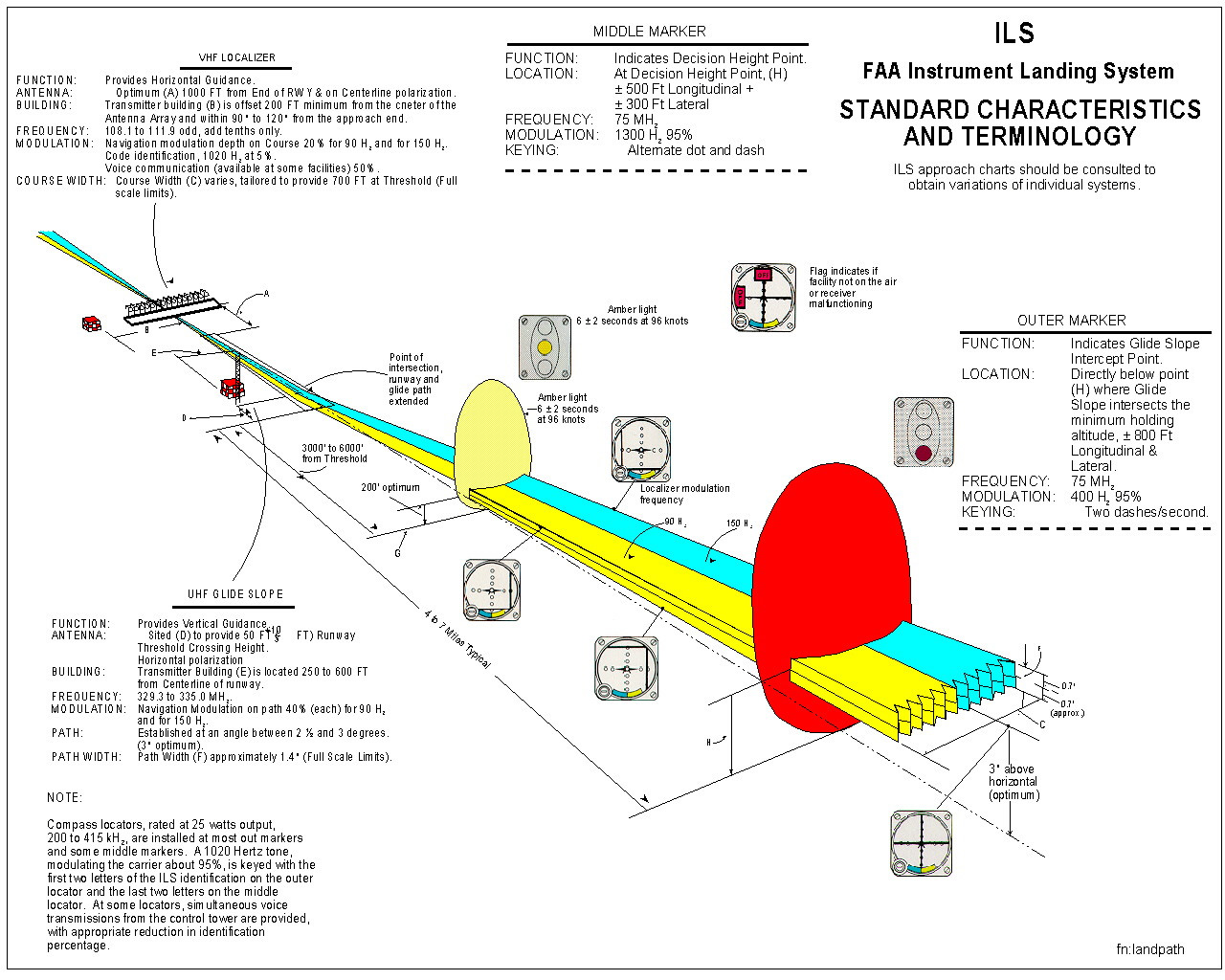
仪表着陆系统 ILS,是目前应用最为广泛的飞机精密进近和着陆引导系统。 它的作用是由地面发射的无线电信号实现水平方向的航向道Localiza和垂直方向的下滑道GildeSlope指引, 建立一条由跑道指向空中的虚拟路径,飞机通过机载接收设备, 确定自身与该路径的相对位置,使飞机沿正确方向飞向跑道并且平稳下降高度,最终实现安全着陆。 因为仪表着陆系统能在低天气标准或飞行员看不到任何目视参考的天气下,引导飞机进近着陆, 所以人们通常将仪表着陆系统称为盲降。
航向道Localiza和下滑道GildeSlope设备在机场内的具体位置可以从下面的ILS系统概念图中找到。

下面具体看看航向台和下滑台。
通过上图可以看到,由航向台地面天线发出的两个等强度的无线电波束形成黄蓝两色的虚拟路径, (左上方的航向台发射的VHF信号里分别使用90Hz和150Hz的调幅频率, 所以能够把面向跑道的区域分成左右两部分。) 进场进近方向上面向跑道时,左边的黄色区为90Hz信号,右边的蓝色区为150Hz, 因此飞机上的接受设备就可以根据两个信号的大小差值判断出当前位置, 提供给飞行员是否正对跑道中央信息,如果偏出的话就可以显示出偏移量以后飞行员进行调整。
航向台 (Localizer, LOC/LLZ)发出的水平方向指示信号(LOC信号)的频率在108.8-111.95MHz之间, 波束为角度很小的扇形,提供飞机相对与跑道的航向道(水平位置)指引。 航向台发射天线组位于跑道进近方向的远端,一般设置于跑道口远端约300米处, 下面是本人于广岛机场拍摄的照片,
 可以看到该航向台是由一组红色天线组成,位置位于28号跑道的末端,
因此它是为10号跑道方向上降落的飞机提供水平指示的。
可以看到该航向台是由一组红色天线组成,位置位于28号跑道的末端,
因此它是为10号跑道方向上降落的飞机提供水平指示的。再看一张关西国际机场06R跑道用的航向台LOC天线,
 当天降落使用同一跑道的反方向的24L,一架JAL的737正从LOC的正上方通过。
当天降落使用同一跑道的反方向的24L,一架JAL的737正从LOC的正上方通过。下滑台(Glide Slope, GS或Glide Path,GP),通过仰角为3度左右的波束, 提供飞机相对跑道入口的下滑道(垂直位置)指引。 下滑台在跑道一侧500英尺,离跑道的进近端1000英尺, 它使用的频率在325~329MHz之间,和航向台的波束相似。 下滑道信标波束也是两个强度相等的波束,分布在与地平面成3º的下滑道的上、下两侧, 在下滑道上侧是以90Hz调幅,在下滑道下侧是用150Hz调幅。 飞机下降坡高于下滑道,则90Hz的电波强,仪表指针向下,驾驶员使飞机机头向下; 反之,如150Hz电波强,飞机则应升高; 当两束电波强度相当,飞机则保持正常的3º坡度下降,平稳地降在跑道上。
下滑台的天线比起航向台要简单一些,
 上面这张照片是我于大阪国际机场32L号跑道外拍摄的,
可以看到画面中央处的竖立着的红白色天线即为下滑台。
上面这张照片是我于大阪国际机场32L号跑道外拍摄的,
可以看到画面中央处的竖立着的红白色天线即为下滑台。顺便提一下,上面照片右侧还有一个红色的设备RVR探测仪,这个可不是导航设施, 它是可以用来测量跑道视程数据的。 跑道视程(Runway Visual Range,简称为RVR)定义了在跑道中线上, 航空器上的驾驶员能看到跑道面上的标志或跑道边界灯或中线灯的距离。 ILS系统的等级在5.4节 仪表进近图中介绍过,精密度等级最高的第三C类(CAT ⅢC), 跑道视程即使为零也能够安全降落。 看几个机场内可以看到的航空气象测量设备的图, RVR探测仪:
 风向风速仪:
风向风速仪:


-
客机驾驶探秘6.1 进近雷达引导时的操纵
在5.6节中总结了由空中管制员执行雷达引导时的对话,下面把进场和进近过程中飞行员的具体操作总结一下。
当管制发出航向指示,如"Air System 115,Turn Left Heading 040", 即要求飞机左转航向至40度方位角。 飞行员会调节模式控制面板MCP(Mode Control Panel)上的航向HEADING旋钮(参见下面波音737的MCP示意图),
 把显示器内的数据拨到040处。然后把旋钮下方的HDG SEL电门按下,
此时飞行管理系统FMA模式会就会发生变化,由原来的水平导航LNAV变为航向选择HDG SEL模式。
把显示器内的数据拨到040处。然后把旋钮下方的HDG SEL电门按下,
此时飞行管理系统FMA模式会就会发生变化,由原来的水平导航LNAV变为航向选择HDG SEL模式。这一变化可以参见下图的FMA(Flight mode annunciation)飞行方式信号器的状态转化图,
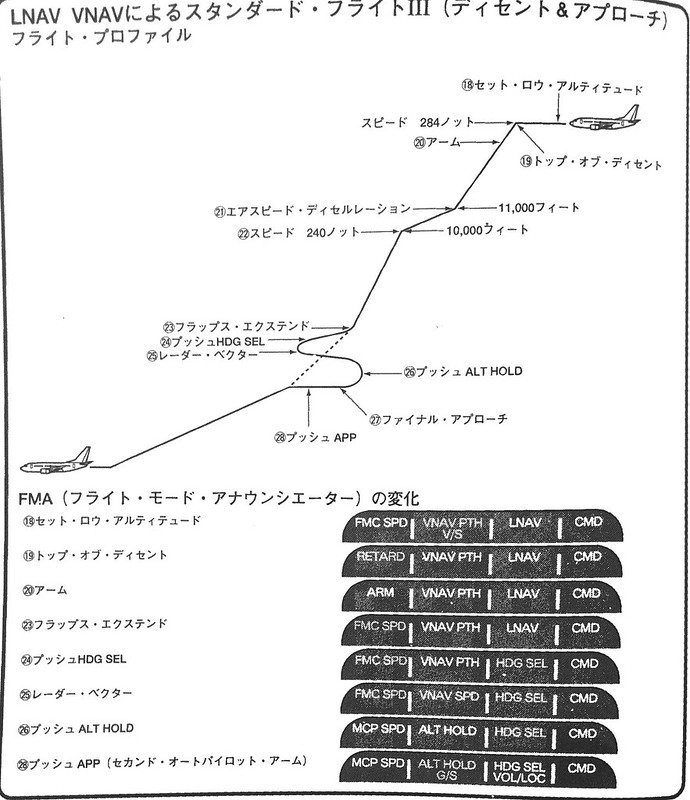 在23的飞行状态中,按下HDG SEL后,水平方向的控制就转为24的航向选择状态,
因此航向的控制就不由飞行管理计算机,而是由飞行员来亲自手动管理了。
在23的飞行状态中,按下HDG SEL后,水平方向的控制就转为24的航向选择状态,
因此航向的控制就不由飞行管理计算机,而是由飞行员来亲自手动管理了。
但是要知道MCP只是管理了飞机的飞行方向,具体的转弯动作还是要靠计算机来自动控制舵面的调整, 一般来说标准的转弯需要飞机横滚30度,(不是只是动一下垂直尾翼处的方向舵啊) 利用左右副翼产生的升力差使机身左右倾斜,达到转弯的目的。 比如想左转弯时,左侧副翼向上抬起,右侧副翼放下,因此右侧机翼产生的升力就会变大, 而左侧升力变小,两侧的升力不平衡,因此飞机机体就会向左方倾斜,开始向左转弯。

当机首方向逐渐接近目的航向,计算机又会调整副翼逐渐减少倾斜度, 直至到达040度航向(北东方向)时刚好使飞机达到平飞状态。
由于开始了雷达引导,所以飞行员也开始关闭垂直高度导航VNAV模式, 启动手动高度控制模式。比如现在飞机处于4000英尺高度平飞状态, 那么飞行员按下高度ALTITUDE旋钮下方的ALT HLD电门,使飞机保持当前的高度。 相应的FMA飞行方式信号也开始转换,自动油门模式由FMC SPD进入MCP SPD, 同时俯仰模式由VNAV ALT进入ALT HOLD模式。 这一变化分别表现在上面FMA状态转化图的第25和26项上。 这样飞机的高度控制也脱离了FMC,变为由飞行员在MCP上直接控制了。
自动油门模式由FMC SPD进入MCP SPD后, 之前一直没有显示的MCP上的速度指示器IAS/MACH就会亮起, 当前的飞机空速会被显示出来。 如果不做调整的话,计算机将自动调整油门,以维持这个速度继续飞行。 飞行员会根据标准仪表进场程序和标准仪表进近程序的要求调整速度, 并根据需要适当地放下襟翼,同时控制空速不超过机体强度限制的襟翼机动速度。
根据手册中的规定,襟翼机动速度是以在5.7节提到的VREF基准速度为基准, 并随重量变化,按照下面的襟翼计划保证飞机速度不至低于失速速度。
以波音737为例,VREF采用襟翼位置40时的襟翼机动速度为: 襟翼位置1 时的襟翼机动速度VREF+50节 襟翼位置5 时的襟翼机动速度VREF+30节 襟翼位置10 时的襟翼机动速度VREF+30节 襟翼位置15 时的襟翼机动速度VREF+20节 襟翼位置25 时的襟翼机动速度VREF+10节 襟翼位置30 时的襟翼机动速度VREF30 襟翼位置40 时的襟翼机动速度VREF40
假设某航班波音737-500在襟翼1的状态下,机动速度为190节, 飞行员就会旋转速度指示器下方的旋钮,设置显示值到190。
-
客机驾驶探秘5.7 下降过程中的操作小结
本节中对飞行员在下降中的操作做个简单总结,机型仍然是以波音737为例。
首先要注意的是下降程序,需要在到达下降顶点TOD前80海里处开始,并在到达10000英尺平均海平面高度MSL完成。
作为下降准备,需要通过ATIS或者ACARS获取目的地机场最新天气实况,进近程序和跑道情况,使用气象雷达观察下降区域的天气,对进近方式,机场资料图,进近图等进行准备。
接下来由副驾驶完成对CDU的着陆航路,目的地机场着陆高度设定。
然后机长和副驾驶进行操纵和通讯的交接,由副驾驶操纵飞机,机长需要仔细检查飞机剩余油量和平衡燃油,按照需要打开防冰电门,核实CDU上进场和进近程序设置,确认好各个航路点高度以及速度限制,在进近基准页上确认好着陆重量/VREF/QNH或者QFE设定,在下降预报页面输入过渡高度层/预报风信息,设置导航频率(VOR/ILS/DME等等),选择自动刹车(一般为1或者2,如果跑道长度比较短或者积水时选择3或者最大),完成进近简令。
这之后机长和副驾驶再次进行操纵和通讯的交接,开始执行下降检查单。
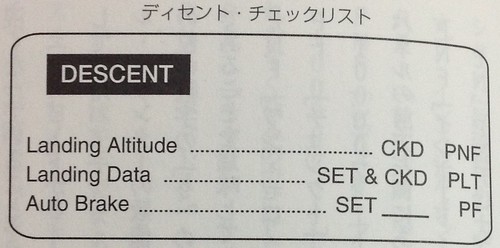 可以看到下降检查单的内容包括了着陆高度的检查,着陆数据的设定和检查,以及自动刹车的设置。
可以看到下降检查单的内容包括了着陆高度的检查,着陆数据的设定和检查,以及自动刹车的设置。在到达CDU计算出来的下降顶点TOD之前,机长要指示副驾驶向空管请示下降指令,得到许可以后,在MCP上设置进场程序初始点的下降高度,VNAV模式控制飞机飞到由FMC自动计算出的TOD点处开始自动下降。
当高度下降到接近过渡高度层时,需要把气压高度计从标准大气压QNE校正到修正海平面气压QNH,
 因为在 4.3 飞行高度与气压以及最大飞行高度中曾对这一设置有过详细解说,这里就不再复述了。
因为在 4.3 飞行高度与气压以及最大飞行高度中曾对这一设置有过详细解说,这里就不再复述了。飞机在垂直方向的平均下降率一般为400米/分,约24公里/小时,因此从巡航高度10000米高空下降到地面时大约需要25分钟左右的时间。
飞机主翼上方都装备有称为扰流板(Spoiler,有时也被称作减升板lift dumper)的装置,分为内侧扰流板(Inboard Spoiler)和外侧扰流板(Outboard Spoiler)两部分。在空中下降时可以向上打开外侧扰流板,可以减少升力增加空气阻力,达到减速的目的。
 上面的照片是我乘坐ANA波音777-200飞往北京首都国际机场下降过程中拍摄的,可以看到位于主翼中部的减速板只打开了一部分,但这也就足够使飞机获得应有的阻力了。
上面的照片是我乘坐ANA波音777-200飞往北京首都国际机场下降过程中拍摄的,可以看到位于主翼中部的减速板只打开了一部分,但这也就足够使飞机获得应有的阻力了。换一个角度,从飞机后侧来看扰流板打开时是这个样子的,
 照片拍摄于日本千叶上空,成田机场进场过程中,机型777-200ER。
照片拍摄于日本千叶上空,成田机场进场过程中,机型777-200ER。另外可以参看下面这张是降落到跑道以后拍的,可以看到位于内侧和外侧的扰流板全部打开,完全直立起来。这样在落地之后,可以给飞机一个很大的阻力,机翼产生的升力急剧下降,使机体和轮胎达到能够完全接地的目的。于是机轮处的刹车也开始发挥作用,提供更大的减速效果。
但是实际上对于飞行员来说,使用扰流板的目的主要不是为了减速,更多是为了增加垂直方向的下降率。 比如当下降路线前方存在积雨云的时候,需要进行回避机动,当躲过积雨云后才开始下降,但此时的下降顶点TOD已经超过了预定地点。为了尽快到达预定高度,这时就可以利用扰流板加大下降率,挽回因回避机动而损失的时间。可是要知道,使用扰流板也有一些缺点,即会产生机体的振动和噪音,对于乘客来说可能会不太舒适,因此飞行员会尽量考虑不使用扰流板的下降计划。
通常在过渡高度层时开始进近程序,并在起始进近定位点IAF或者开始雷达引导前完成进近程序。
进近程序包括设置旅客信号牌,即点亮安全带灯(10000英尺以下由于地表温度高,由此产成的大气对流现象容易产生颠簸);达到10000英尺以后接通固定着陆灯和频闪灯电门(提高识别力,减少和其他飞机或者鸟类空中相撞的几率);高度过渡层设置高度表并交叉检查;设置所需通讯和导航频率(VOR/ILS/DME等)。完成之后执行进近检查单,
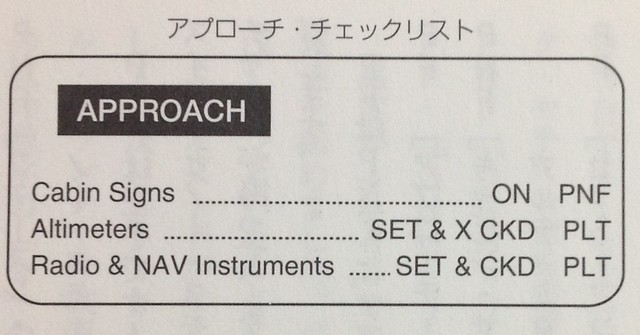 内容如上,也就是进近程序中所说明的各项内容。
另外飞行员还需要调整座椅,系好肩带,通知客舱乘务员下降准备,
内容如上,也就是进近程序中所说明的各项内容。
另外飞行员还需要调整座椅,系好肩带,通知客舱乘务员下降准备,飞机高度不断下降,逐渐接近起始进近定位点IAF,(以上一节的介绍为例,高度4000英尺),垂直方向下降率也不断逐渐降低,飞机的姿态开始接近level off平飞状态了。
因为不再下降,发动机就不能再开慢车,必须加大油门,保持飞机具备足够的升力,当然这也是由计算机的自动油门来自动控制的。因此客舱内的旅客也可以感觉到外面发动机的噪音也比下降阶段增大,有经验的乘客就会知道很快就会降落了。
最后再补充一点关于飞机上防冰系统的知识。
当飞机在较高航线飞行时,飞机表面温度是在0℃以下的,如飞机下降过程中遇到潮湿空气,即使此时环境温度在冰点以上也可能形成透明冰或霜,影响飞机的正常飞行。
过冷水滴(supercooled water droplet)是负温下未冻结的液态水滴。我们都知道在地面条件下低于零度后水就会结冰,但是在高空中存在这种特殊的水,因为水中缺少凝结核,即使在零下十几度甚至几十度还保持着液态。飞机穿过有过冷水的云层时,云中的过冷水遇到飞机,在有凝结核时会马上结成冰,飞机机身就是凝结核。
当飞机机翼出现积冰时,对空气动力的影响是很大的。风洞试验表明,当机翼前缘有半英寸厚的积冰时,会减少50%的升力和增加60%的阻力,严重的话会造成机毁人亡的重大事故。同样严重的是发动机结冰,如果发动机整流罩上结冰,冰块被吸入发动机内部就可能损害风扇等重要零件,造成发动机故障,其危害不言而喻。
以波音737为例,
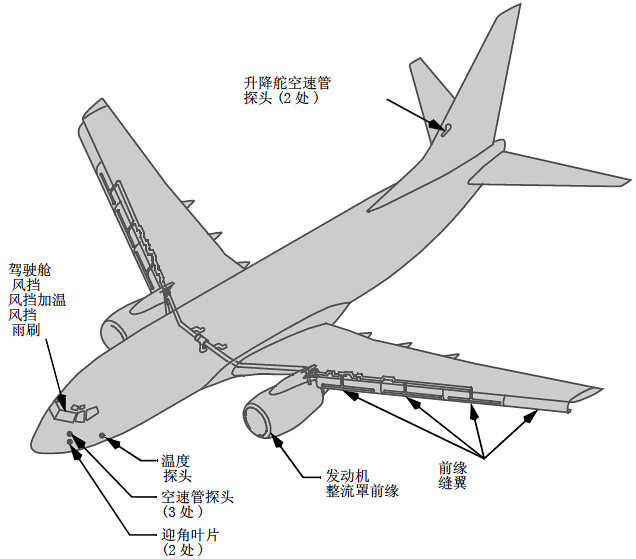 机上防冰系统一般包括了驾驶舱风挡加温,风挡雨刷,探头和传感器加温,发动机防冰,机翼防冰以及结冰探测等分系统。
机上防冰系统一般包括了驾驶舱风挡加温,风挡雨刷,探头和传感器加温,发动机防冰,机翼防冰以及结冰探测等分系统。空速管(皮托管)探头、大气总温探头以及迎角叶片都是获取飞行数据的重要传感器,如果因为结冰而不能或者正确飞行速度/气压/温度等数据,那么飞行计算机和飞行员就无法正确操纵飞机,因此这些设备都采取电加温以保持其不会结冰(静压孔都不加温)。
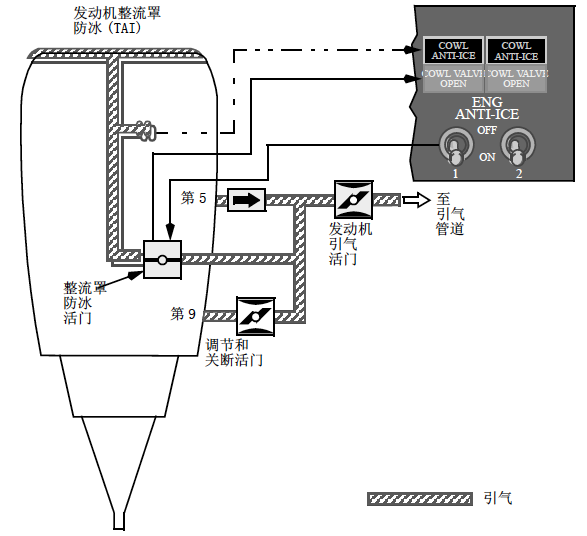
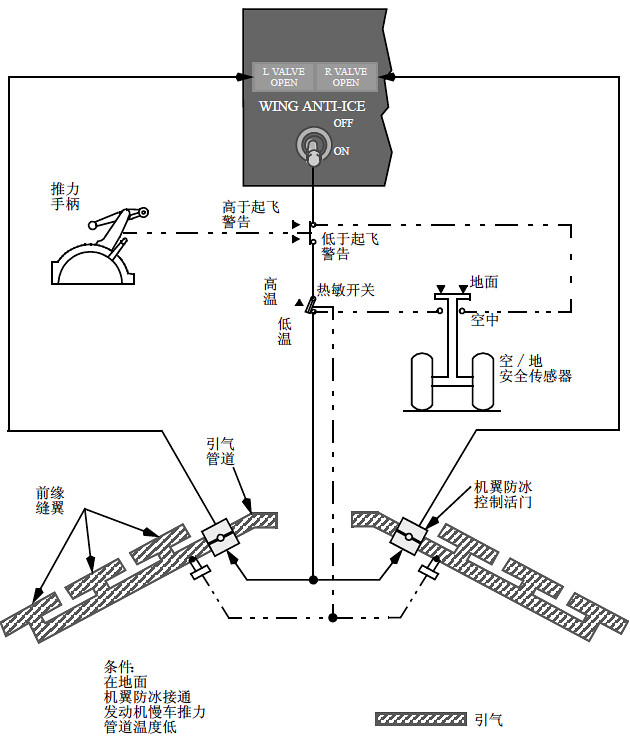
发动机防冰系统,能够把发动机内的高温高压空气引到发动机整流罩前缘,利用热气加热整流罩,达到防止结冰的目的。驾驶舱内的ENG ANTI-ICE电门可以控制该系统运转。
机翼防冰系统也是使用发动机的热气,该系统只为内侧前缘缝翼提供保护,不为前缘襟翼和外侧前缘缝翼服务,由驾驶舱内的WING ANTI-ICE电门进行控制。
-
客机驾驶探秘5.6 下降过程中的空管通话
飞机开始下降前一定要得到空中管制的许可,本节简单总结一下从巡航到下降阶段的通话内容, 继续以东京羽田机场到北海道扎幌新千岁机场的AirSystem115航班为例。
飞机进入札幌三泽西区域管理中心区域,这时东京管制区的空管需要把该航班的管理移交给札幌三泽西区域,因此发出指示: “Air System 115,Contact Sapporo Control 133.3”, 意思就是 “Air System 115, 请联系札幌三泽西区域133.3”。 飞行员回答到: “133.3 Air System 115” 然后把电台通信频率调至133.3MHz,并联系空管: “Sapporo Control,Air System 115,FL410” 意思就是 “札幌区域,这里是Air System 115,现在飞行高度为41000英尺” 如果札幌三泽西管制区的空管接到报告并在雷达上确认好了就会回答: “Air System 115,Sapporo Control,Roger” 意思是 “Air System 115,这里是札幌三泽西区域,收到”
飞机飞过札幌三泽西管制区就会进入札幌北海道南区域管理中心,此时再次完成移交通话, 管制员:Air System 115,Contact Sapporo Control 119.3 (Air System 115, 请联系札幌北海道南区域119.3) 飞行员:119.3, Air System 115 飞行员:Sapporo Control, Air System 115, FL410 管制员: Air System 115, Sapporo Control, Roger
此时飞机距离下降顶点TOD已经不远了,飞行员业已完成进近简令和下降检查单,空管也会发来下降指示,要求飞行员从当前高度下降至15000英尺,通话如下: “Air System 115,Decent follow discretion, Maintain FL150” 意思为 “Air System 115, 下降保持到15000英尺,时间自己掌握”
-
客机驾驶探秘5.5 开始下降
在5.3节中总结标准仪表进场程序时提到,根据进场起始航路点的位置高度信息,飞行员再参考预达时间,耗油率,发动机性能,风力风向等因素,就可以设置下降过程中的发动机参数和下降率了。
比如KAIHO进场程序起始于位于太平洋里的ADDUM航路点,最低航路高度为10000英尺,为了能够从巡航高度降到ADDUM,通过FMS飞行管理计算机的计算,飞机需要从距离ADDUM西侧200公里处的地点就需要开始下降,
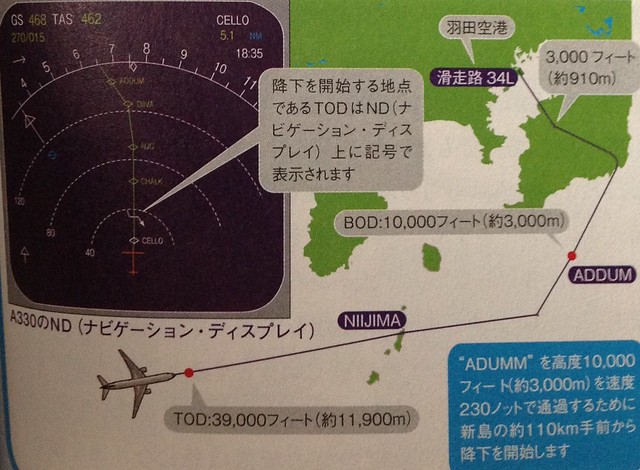 一般把这个点叫做下降顶点Top of Descent, 简称TOD或者T/D,可以在ND的地图模式里看到它的显示,如上图中的空中客车330中以一个带箭头的折线表示出来,地点位于CELLO和CHALK定位点之间。另外进场起始点被称作Bottom of Descent, 简称BOD。
再比如在波音777的ND中,T/D的地点直接被标注出来,由航路上的一个圆点来表示。
一般把这个点叫做下降顶点Top of Descent, 简称TOD或者T/D,可以在ND的地图模式里看到它的显示,如上图中的空中客车330中以一个带箭头的折线表示出来,地点位于CELLO和CHALK定位点之间。另外进场起始点被称作Bottom of Descent, 简称BOD。
再比如在波音777的ND中,T/D的地点直接被标注出来,由航路上的一个圆点来表示。
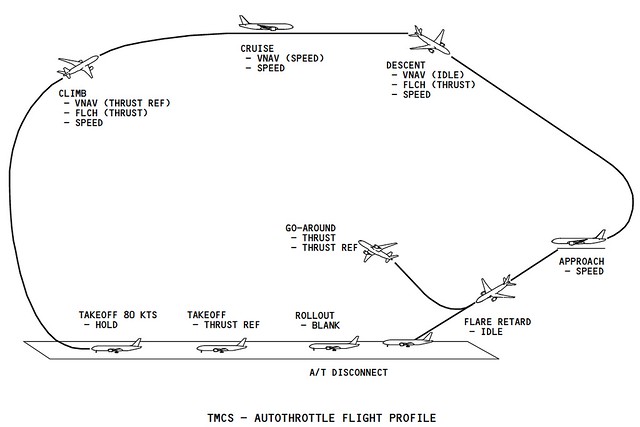
经过TOD以后,飞机就开始自动下降高度,整个航程的示意图如下所示。(这个图主要是解释每个飞行阶段时的自动油门设定模式,但用来解释整个飞行过程也挺合适,所以拿来借用一下。)
关于下降过程,一定要知道的一点是,飞机不是靠压低升降舵,即压低机头使机体降低高度的;飞机是通过油门来控制飞机的下降坡度的。
飞机从平飞进入下降状态时,适当收一些油门,这样飞机会降低一些速度。根据升力和速度的正比关系,速度减少升力也就减少,因此升力就会小于重力,于是飞机就开始下降。飞机下降的时候,飞行的路线就不再是水平的,而是向下倾斜一个角度,此时机翼的仰角并没有改变,但飞机前进的方向改变了,从原先的往正前方变成往前方稍微偏下,因此机翼的攻角增大,升力也就增大,于是多出来的这部分攻角升力平衡了多出来的那部分重力,飞机的所有外力重新恢复平衡,进入一个匀速下降的状态中。
下降的时候飞机头是往下俯的,因为这个姿态对于推力要求非常小,很多时候飞机甚至可以将油门完全收光滑行,大家在坐飞机的时候应该会注意到在下降的开始阶段飞机会变得非常安静。可以把下降中的飞机姿态想象成下坡时的汽车,此时不用踩油门汽车也会稳定的下降,向下坡度大的话速度也就大,坡度小的话速度也就相对慢一些。现代飞机上的飞行管理计算机可以根据飞行员的要求很好地自动调整好油门和姿态。
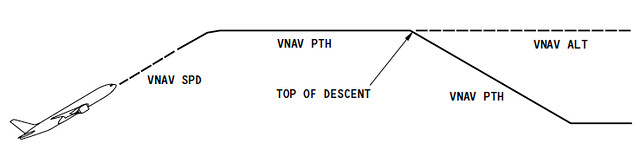
一般来说飞行员可以设定两种下降方式,即维持一定速度或者维持一定坡度的下降方式,对应FMC的俯仰设置,也就是可以采用VNAV SPD(垂直导航速度模式)或者VNAV PTH(垂直导航航迹模式)模式。
VNAV SPD 下降中一般自动油门系统会保持慢车状态,而自动飞行操纵系统AFDS会控制保持FMC上的目标速度。
VNAV PTH下降中,飞行管理计算机FMC一般会控制飞机维持3度的下降坡度,在TOD和BOD之间的速度由计算机来自动控制。比如当飞机受到风的影响向上偏离了3度的坡度时,FMC会增加一些速度使飞机保持在原有坡度上。
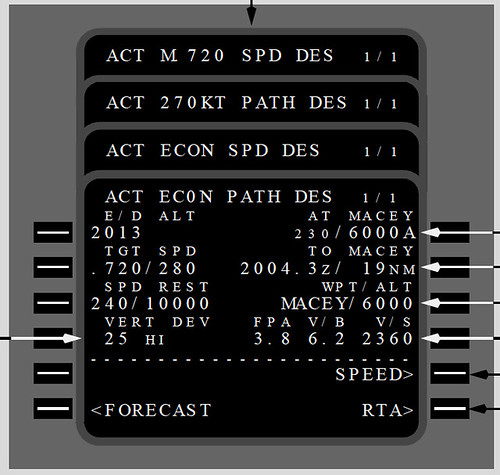 上图为波音737的CDU画面,同在VNAV PTH状态下,下降开始时由巡航时的ACT ECON CRZ自动变为ACT ECON PATH DES模式,2L处显示出当前速度值为0.72马赫,280节,3L处显示出速度限制,因为行业规定在10000英尺以下飞行时的速度限制为250节,为了不超过这个限制,特意把速度限制设定在240节上。
上图为波音737的CDU画面,同在VNAV PTH状态下,下降开始时由巡航时的ACT ECON CRZ自动变为ACT ECON PATH DES模式,2L处显示出当前速度值为0.72马赫,280节,3L处显示出速度限制,因为行业规定在10000英尺以下飞行时的速度限制为250节,为了不超过这个限制,特意把速度限制设定在240节上。
为什么一般会采取3度的坡度来下降呢?这是因为3度的时候最适合于心算出高度和下降距离的关系,可以根据这个近似公式: 下降所需距离(海里)=飞行高度(英尺)/1000*3 很容易地估算出出来。 比如从巡航高度33000英尺的高度降落地面,飞行高度/1000*3就可以得到99海里(约190公里)的结果,因此飞机要从33000英尺即10公里高空降落下来,至少需要从目的地机场外的190公里处开始下降才行。
-
客机驾驶探秘5.4 仪表进近图
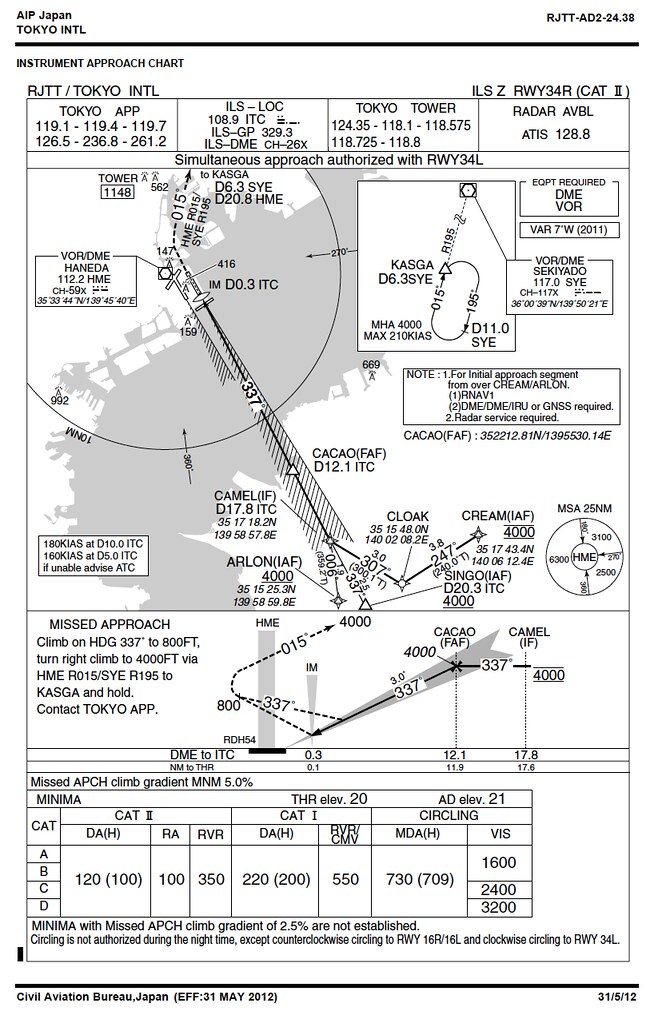
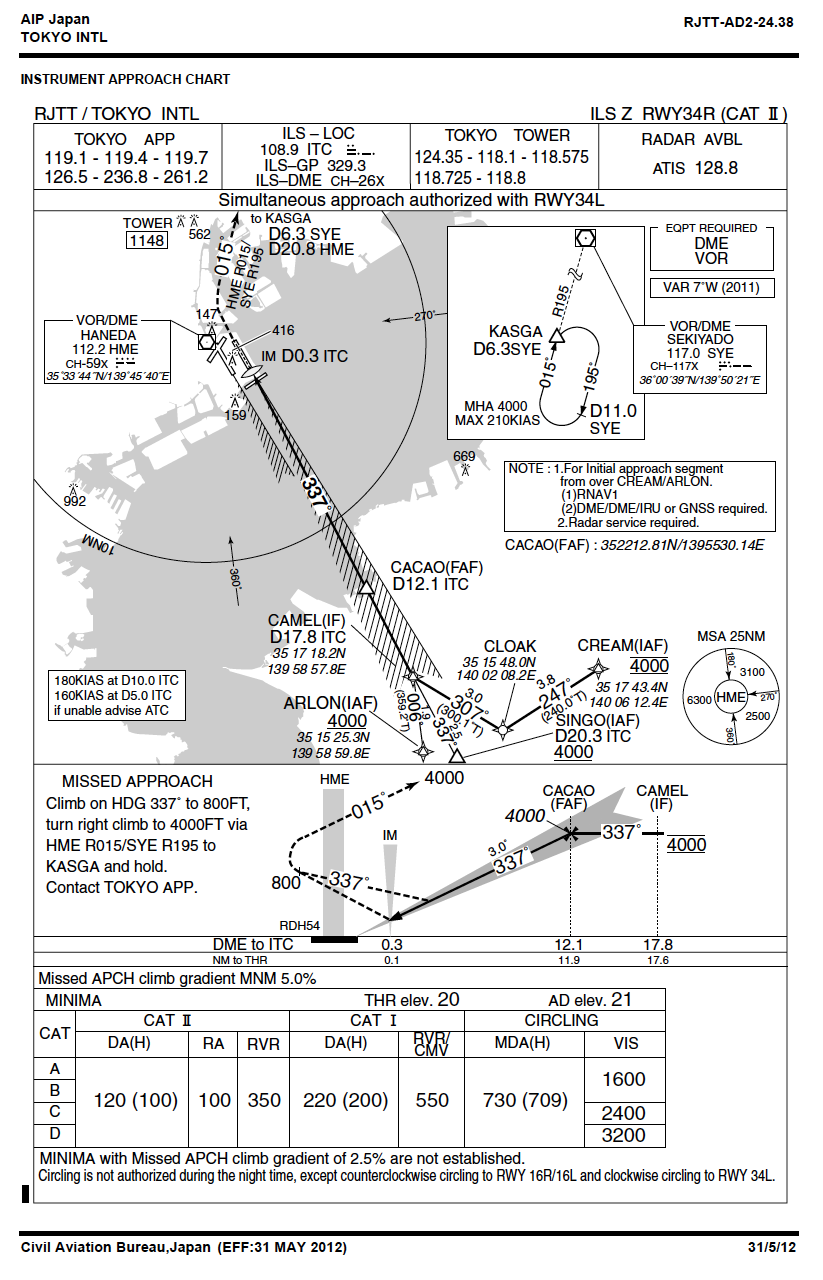
结合仪表进近图来简单总结一下仪表进近程序,以东京国际机场ILS Z RWY34R(CAT II类)程序为例。
进近(Approach)是指飞机下降时对准跑道飞行的过程。在进近阶段,要使飞机调整高度,对准跑道,从而避开地面障碍物,飞行员必须要注意力高度集中才能准确操作,因此进近是有着严格的标准和操作规程的。上面的 “ILS Z RWY34R(CAT II类)“就是指进入东京国际机场34R号跑道时的第一个(Z,第二个以Y命名,第三个为X命名)仪表进近程序名。
根据机场在最后的进近航段是否提供垂直方向上的下滑引导,进近程序又可以分为精密进近和非精密进近2大类。用于精密进近引导的导航设施有仪表着陆系统ILS(Instrument Landing System,俗称盲降系统),微波着陆系统MLS和精密进近雷达PAR,而非精密进近设备包括VOR, NDB, LOC,GPS等。ILS应该是知名度较高的自动着陆系统了,因此本节介绍的 ILS Zulu RWY34R(CAT II类)进近图就使用精密进近ILS程序为例。 进近阶段一般包括起始(从起始进近定位点IAF到中间进近定位点IF,从进场到进近的过渡,根据导航设备使飞机转向到跑道方向),中间(中间进近定位点IF到最后进近定位点FAF,航迹保持与跑道方向一致,平飞,调整速度姿态使飞机能够平稳地进入最后进近),最后进近(从最后进近定位点FAF到复飞点,沿着陆航迹下降,对准跑道中心,下降至决断高度)和复飞几个阶段。
仪表进近图是仪表进近程序的直观图形表示,图中包括了信息栏,平面图,剖面图,着陆最低标准等内容。
先看最上部的信息栏,这里提供了飞行员所需要的通信频率。
第一项TOKYO APP东京进近管制的频率一共有6个,119.1-119.4-119.7-126.5-236.8-261.2MHz,具体需要使用哪个频率要看进场时空管的分配。
第二项是导航设备的频率信息,仪表着陆系统ILS-LOC导航台的频率108.9MHz,后面的ITC为32R号跑道的识别号码,后面还标出了它的摩尔斯码,飞机上的导航设备捕捉到电波的同时,飞行员还需要监听摩尔斯码,以确定调谐频率是否正确。 LOC(航向台Localizer的缩写)是ILS的一个子系统,可以为飞机提供水平方向上的引导,使飞机能够正确飞行在跑道中心线的延长线上。ILS-LOC导航台的频率108.9MHz。 GP(下滑台,Glide Path的缩写,有时也叫Glide Slope)是ILS的另一个子系统,提供了垂直方向上的引导,以使飞机能够以正确的坡度降落下来。ILS-GP的频率是329.3MHz。 另外,航向台和下滑台的载波频率是配对的,这样只要一次选择就能将两台接收机调谐好。 最下面的CH-26x是ILS-DME测距仪的代码。测距仪也是一个装备在机场内的装置,能够提供给飞行员一个以海里为单位的飞机距离跑道的直线距离(即斜距)。

第三项是塔台空中管制用频率,这里有5个,124.35-118.1-118.575-118.725-118.8MHz,具体使用哪个也需要进近管制的联系,一般来说每个频率都对应一条跑道一般不会变更。
第四项是在5.1节 下降准备中提到的ATIS广播频率,这里是128.8MHz。
接下来看平面图这部分。平面图一般提供了进近程序的地图,包括地形地貌,导航设施信息,航迹信息,各种定位点等等。
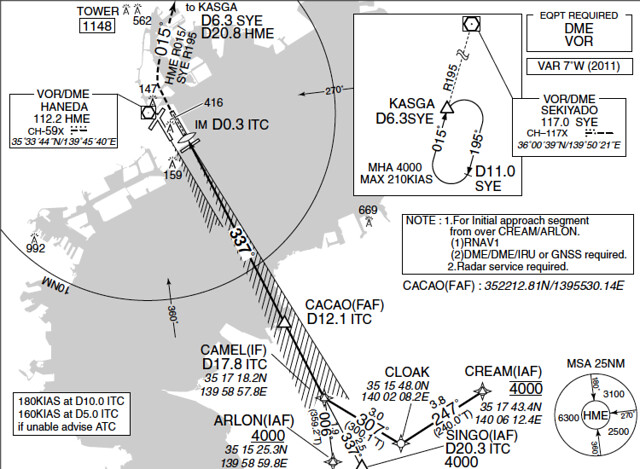 首先平面图中央的灰色部分是指东京湾,而东京国际机场位于图中的左上方,以机场为圆心的圆弧线表明了机场塔台管制区的范围。上面的图有些小,可能看不太清楚,可以点击这里看大图。图的左上角处有TOWER 1148的字样,这应该是著名的景点东京塔的标识吧,它的标高为1148英尺。
首先平面图中央的灰色部分是指东京湾,而东京国际机场位于图中的左上方,以机场为圆心的圆弧线表明了机场塔台管制区的范围。上面的图有些小,可能看不太清楚,可以点击这里看大图。图的左上角处有TOWER 1148的字样,这应该是著名的景点东京塔的标识吧,它的标高为1148英尺。ILS仪表着陆系统的航道在图中用带有羽状短线的大箭头来表示,非常醒目,其方向顺着进近方向,指向机场跑道头。箭头处的IM字样表明了内指点标IM的位置,内指点标表明了邻近跑道入口的位置,“D0.3 ITC"意味着这里距离ITC测距仪的距离为0.3海里。指点标也是一种地面导航设施,包括有外指点标OM(Outer Marker),中指点标MM(Middle Marker)和内指点标IM(Inner Marker),提供飞机相对跑道入口的粗略的距离信息,在平面图中以枣核形标示出来。
平面图中右下侧给出了最低扇区高度信息MSA,以指向机场内HME VOR为中心,把空域分为多个扇区,分别公布各空域的MSA。MSA提供给飞行员在起飞离场和进场降落时的一个最低安全高度。360度~180度扇区为6300英尺,180度~270度上去为3100英尺,270度~360度扇区为2500英尺。本图中3个扇区可以看到机场西侧的扇区最低高度明显比东部要高,因为机场西边就是东京市内,而东部是东京湾海上,障碍物当然西部要比东部多得多,所以安全高度也要高得多。
平面图中用粗实线绘出进近航迹,其中起始进近定位点IAF(Initial Approach Fix)作为航迹的起点,在上面平面图的中下部可以找到3个,即CREAM,SINGO和ARLON定位点。图中每个定位点处都标出其经纬度和最低安全高度信息,在这里的高度为4000英尺,因此下落过程中,飞行员要操纵在飞到IAF时,把飞机降低高度到4000英尺或以上高度。SINGO IAF处还标出来距离该定位点离ITC测距仪的距离,“D20.3 ITC"表明此处距离机场20.3海里。
复飞航迹使用带末端箭头的虚线绘出。可以看到上图中左上方沿跑道方向并转至15度方位角,“to KASGA"的航迹即为复飞航线。
在航迹线中还标出了磁航线角信息,比如从CREAM到CLOAK定位点之间的航迹为247度磁航向,从CLOAK到CAMEL定位点的航迹为307度磁航向,从ARLON到CAMEL定位点为006度磁航向,从SINGO到CAMEL为337度。同时在磁航线角下面还用小号字体标出了真航线角,在数值后面由大写字母T注明,如从CREAM到CLOAK定位点之间的航迹为240度真航向等等。
航线角上方还提供了各个定位点间的距离信息,比如从CREAM到CLOAK定位点之间为3.8海里,从CLOAK到CAMEL之间为3海里,从ARLON到CAMEL为1.9海里,从SINGO到CAMEL为2.5海里。
进近过程中另外两个重要的地位点是中间进近定位点IF(Intermediate Fix)和最后进近定位点Final Approach Fix (FAF)。从不同方向飞来的飞机经过不同的IAF调整航向,汇集到中间进近定位点IF处后,继续飞行至FAF,然后飞机进入最后的沿ILS下滑道降落的过程。
平面图右侧的NOTE中有使用该进近程序的注意事项,一个是使用CREAM和ARLON起始进近定位点的飞机必须装备有区域导航或者DME/IRU/GUSS等导航设备,一个是必须事先得到雷达引导。
图中左下方还标明了速度限制的信息,距离ITC测距仪10海里(约为18公里)处时的速度限制为180节(约为330公里/小时),距离5海里(约为9公里)处的限制为160节(约为300公里/小时)。
下面介绍进近图中的剖面图部分。剖面图用立体图直观地表示了进近程序的飞行航迹,一般包括了下降航迹,各种空域定位点,推荐的下降高度以及复飞图标。
上图的下降航迹从右向左以带箭头的粗实线表现出从中间进近定位点IF CAMEL开始飞向FAF CACAO,到下降至内指点标IM的过程。IF处的推荐飞行高度为4000英尺,距离ITC为17.8海里(距离跑道入口处17.6海里)。
从IF到FAF飞机以337度磁航向保持平飞,到达距离ITC测据点12.1 海里(距离跑道入口处11.9海里)处的最后进近定位点FAF(非精密进近程序的FAF在图中用Maltese Cross马耳他叉标志出来,但是精密进近程序的最后进近航段的起点叫做最后进近点FAP,其位置一般不在图中标注任何符号)时开始下降,垂直导航下降线终止于内指点标IM,图中标出了垂直导航下滑角为3.0度,磁航向337度。
-
客机驾驶探秘5.3 标准仪表进场程序
上一节写的进近简令中的对话是以雷达引导进场为基础的,一般来说对交通量比较大的时候, 为了安全管理各个航班飞机之间的间隔,由空管指示每架飞机的飞行方向高度和速度,即雷达引导。 但是在交通量不大的时候,往往使用各机场标准仪表进场程序,即STAR(Standard Instrument Arrival)。
STAR提供了飞机脱离航路飞行,过渡到机场终端区飞行的方法。 STAR一般来说终止于仪表进近程序的起点IAF(Initial approach fix)。 使用STAR的好处是既可以用图形的方式标出进场的航路结构,亦可以简化空管和飞行员之间的通话程序,免去繁琐的进场指令。
一个机场根据跑道和航向的不同往往定义了多种进场程序,比如以东京国际机场来说, RNAV(区域导航)的进场程序有ARLOG,CREAM,CACO,BACON,DATUM,NYLON,STEAM,BALAN,DARKS,DAIYA,KAIHO, 非RNAV的进场程序有EGARI,SINGO,KENJI,NAGAI等。 标准仪表进场程序名一般都以航路点或者定位点来命名。
区域导航要求飞机具备GPS,FMS,VOR/DME等多种导航设备,可以使用事先确定好的航路点, 采用经纬度坐标和VOR/DME等地面导航设备的相对距离方位测定飞机的地理位置,使飞行的效率更高。
下面就结合东京国际机场的KAIHO STAR图简单总结一下标准仪表进场程序。
在右侧标题栏里注明了STAR RWY34L/R,因此可以知道这是为使用34L/R号跑道降落用时而使用的进场程序。
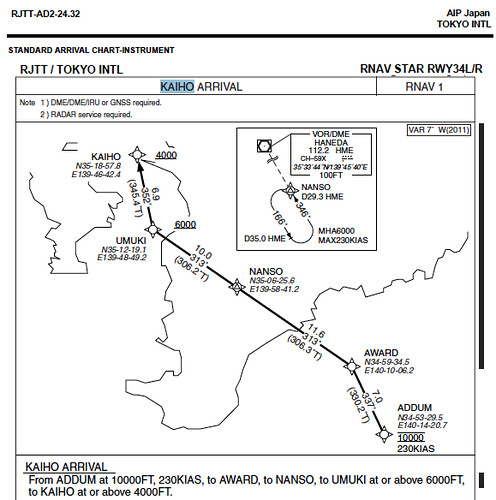
首先可以看到NOTE里的注意事项,该程序要其飞机装备有DME/DME/IRU或者GNSS的导航设备,并同时需要接受雷达引导服务。
NOTE下面是进场图的平面图,可以看到图中间是深入海中位于千叶县的房总半岛,图左侧是位于神奈川县的三浦半岛,两个半岛之间就是东京湾。东京国际机场的位置没有在图中标示出来,但是根据航向箭头的方向可以猜出来机场应该在图外左侧上方。
KAIHO进场程序起始于位于太平洋里图中右下侧的四角星ADDUM航路点,图中标出了它的经纬度以及飞行条件限制,即最低航路高度为10000英尺,最大速度230节。根据这个条件,飞行员再参考预达时间,耗油率,发动机性能等因素,就可以设置下降过程中的发动机参数和下降率了。 一般地RNAV导航方式的航路点以四角星标示,而对于VOR/DME定位点使用三角形标示。
ADDUM的下一个航路点是同样位于海中的AWARD,图中给出了AWARD的经纬度以及这段航路的距离和方位,即7海里,337度磁航线角。可以看到平面图的右上方标出了该区域的地磁偏角为西7度,真航线角330度也同时被标了出来。
下一个航路点位于陆地上,是千叶县房总半岛中部的NANSO,飞机到达AWARD以后,需要调整方向, 以313度航线角穿过房总半岛,飞行11.6海里后经NANSO后,飞向10海里以外的位于东京湾内的UMUKI航路点。可以看到UMUKI航路点右侧的6000英尺高度标记,因此此时飞机应该降低高度到6000英尺以上。
到达UMUKI以后飞机需要再次调整方向,以352度航线角北上KAIHO,飞行6.9海里后到达KAIHO,此时飞机应降低高度至4000英尺高度或以上。
另外平面中上方处的方框里海标出了标准等待程序(轨迹看起来很象运动场的跑道),如果飞机没有得到ATC的近进许可,那么到达NANSO后需要以NANSO作为入航航迹执行左转弯的标准等待程序。 NANSO的位置还可以通过羽田(HME)VOR/DME导航台来确定,该台频率为112.2MHz,沿346度径向线向台,DME距离29.3海里。
等待程序是为了便于管制员在繁忙的机场或者在危险天气情况下进行流量管理,以保持飞机间必要的间隔而设立的飞行程序。 等待航线由等待定位点,等待方向,出航边长度,最低等待高度MHA,最高等待速度MAX等信息组成。 在上图中可以看到等待定位点为NANSO,入航航迹346度,等待方向166度,出航边长度为35海里羽田VOR/DME,最低等待高度6000英尺,最高等待速度230节。 在没有得到管制员的指令的情况下,飞机就不得不按照等待航线不断的在空中绕圈子,排队等待进场次序或者等待天气恢复正常。
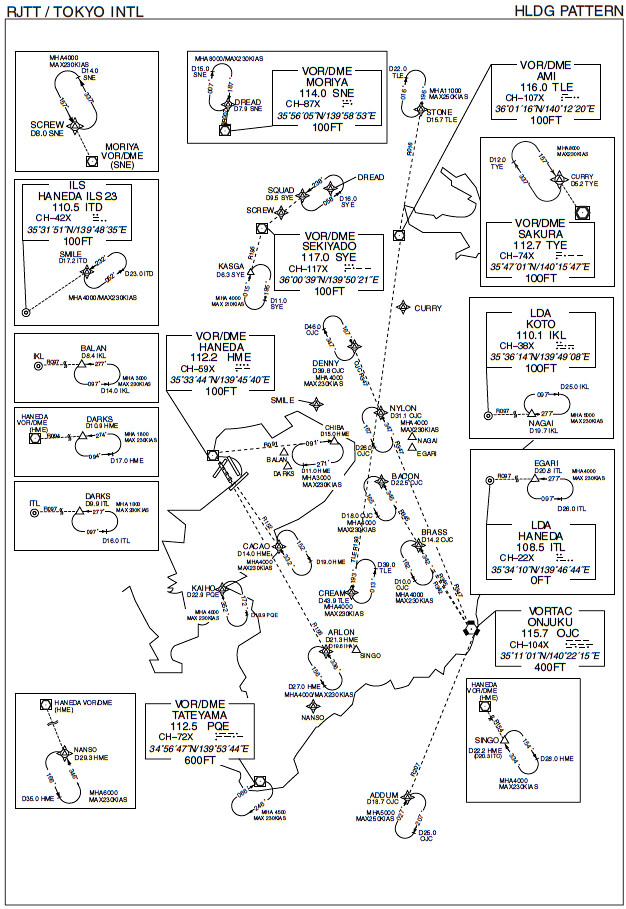
再看看羽田机场附近规定的所有等待程序,在东京湾周围密密麻麻地定义了十数个等待航线。对于每个航线可以设定不同的高度,因此是可以同时有数架飞机在同一航线飞行的。
飞机到达IAF以后就开始进入进近程序,所以下一节里再总结一下如何看仪表进近图。
Prev: 进近简令 TOC: 目录 Next: 标准仪表进近程序
完
-
客机驾驶探秘5.2 进近简令
“飞行简令是飞行某一阶段、某一动作实施之前,操纵飞机的飞行员向另一名飞行员说明即将开始的实施意图,即对某一动作的正常和非正常飞行程序、操纵要领、注意事项以及机组分工进行简要复述,使机组成员明确各自的职责,正常时如何办,不正常时如何分工配合,就好比战前演习一样。
以进近简令为例,对简令的要求是:进近简令由主飞操纵者讲,声音要清楚,机组成员都要明确意图;进近简令是进近准备的重要程序,二位在座驾驶员都要对照仪表进场、进近图,从上至下按仪表进近内容复习进近程序,考虑备降方案;进近简令讲解时,另一个飞行员要注意听并及时修正达成共识;进近简令要抓住要点,简明扼要,以上所列内容不必面面俱到;特殊情况或任一进场因素与常规程序有差异时,进近简令必须包括相关内容。 " – 以上摘自百度百科
“一般进近程序可以分为五个阶段:进场、起始、中间、最后和复飞阶段。
(1) 进场阶段:是指一条由航路阶段至用于程序的电台或一个定位点(起始进近定位点)的进场航线,该航线表示在进场图中。在此阶段,飞行员应注意有效控制下降航径。 (2) 起始进近阶段:是指从起始进近定位点(IAF)开始至中间定位点(IF)终止。起始进近阶段,飞机已经脱离结构航路,正在机动飞行进入中间进近阶段。 (3) 中间进近阶段:如果有最后进近定位点(FAF),中间进近阶段的开始是在程序转弯与基线转变时飞机已切到入航航迹上;在直角航线飞行时飞机已经转到最后进近航迹上。如果没有最后进近定位点(FAF),则向台飞行即为最后进近航段。在这个航段中飞行应调整飞机速度与外部形态,准备进入最后进近。 (4) 最后进近阶段:在这个航段飞机保持航迹进行下降着陆。 (4。1)非精密进近的最后进近(有FAF):最后进近航段的开始是在电台或定位点(FAF),从FAF至MAP点止为最后进近阶段。 (4。2)精密进近的最后进近:从飞机切入下滑道的一点(FAP )开始到失误进近点(missed approach point, MAP)为止。 (5) 复飞阶段:就是到达决定高度DH以后,不能建立所须目视参考,立即开始拉升动作的阶段。在复飞阶段在要改变飞机的外部形态和姿态及高度,复飞阶段分为起始、中间和最后复飞阶段。起始复飞阶段是指从MAP点开始至建立爬升为止;中间复飞阶段是指直线爬升至50米超障余度为止;最后复飞阶段是指从50米超障余度开始至另一次进近、等待或回到航路。 从起始进近到复飞,所有信息都表示在进近图中。”
– 以上摘自网上山东航空公司飞行部的资料"ILS五边进近体会"一文
那么进近简令到底是什么内容呢? 正好我手头上的这本機長席书里提供了某航班飞行中驾驶舱内的详细解说,并且配有现场录音CD,生动再现了飞行员间的互相喊话以及空中交通管制通话,是很好的第一手资料。下面就以这本书里的内容(准备向羽田机场方向降落是的对话)翻译一下。

副驾驶: “羽田机场的停机位为2号停机口。没有关于跑道16L的NOTAM信息。”
机长: “没有NOTAM,知道了。
计划16L号跑道降落,风向200度,17节,恩,是右侧风。 天气良好。无云。温度14度,雾点2度。高度表拨正值3019。
使用VOR/DME 16L进近。 雷达引导进场程序。 MDA(Minimum Descent Altitude,最低下降高度)是1000英尺。 KWE江东VOR的方向是320度。
(注:从2009年起江东VOR被取消,已经被新的台场VOR替代。机长席一书出版于1999年,江东VOR是当年曾经使用过的VOR设备。KWE VOR/DME以带有放射线的圆圈表示,内部有黑色实心圆,其位置可以在下图中上部中央处找到。)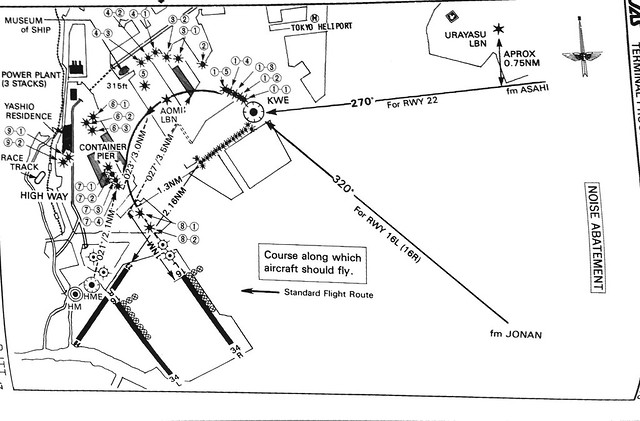
最终段使用L−NAV水平自动导航模式。 江东VOR以北为了减低市区的噪音尽量不往北拐,要尽早向左转弯。 最后手动使用根据垂直偏移和飞行航迹矢量(在PFD 上)完成进近。
复飞时由我指示复飞襟翼设置。 获得正爬升率以后收起落架。 复飞航线沿浦贺,馆山方向。 上升至高度4500英尺。 尽早和塔台取得联系后再度接受雷达引导进近。
垂直方向采用垂直自动导航V-NAV。 估计5边高度为1500英尺。 降落襟翼角30度。 VREF(基准速度,此时为于襟翼30着陆形态下的着陆速度)为130节。 自动刹车档2档。
降落后的跑道出口预定是C4,J3。停机位2号。
有什么问题吗?”
副驾驶:“没有问题”
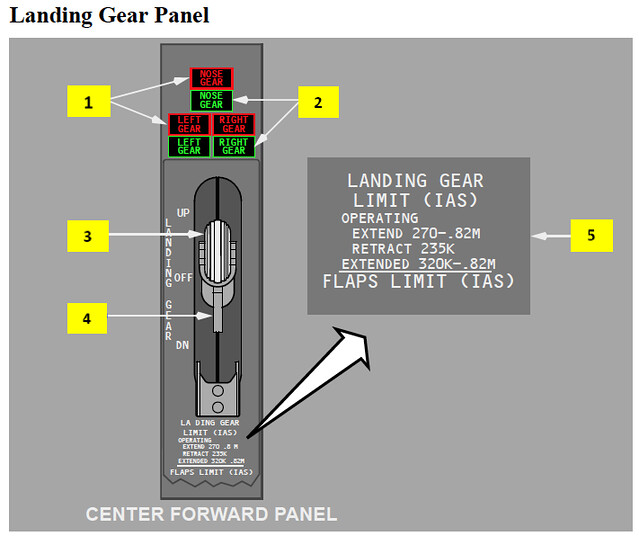
结束进近简令以后,副驾驶需要执行下降程序,把上面决定好的各项数据输入FMS,并由机长检查确认无误以后正式完成确定。比如上面的VREF需要在CUD的进近基准(APPROACH REF)页面上输入,
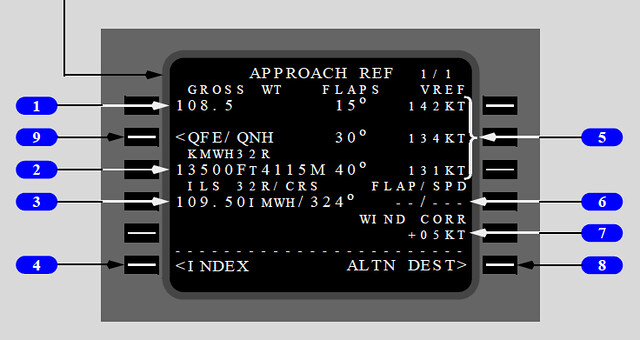 上图的"5"箭头指向处即为该项设置。
上图的"5"箭头指向处即为该项设置。刹车设置电门位于中央前面板,副驾驶需要将自动刹车(AUTO BRAKE)选择电门设置到所需的刹车设置。
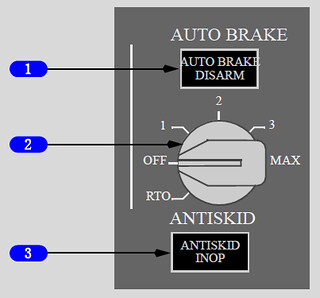 上图为波音737的刹车设置面板。
上图为波音737的刹车设置面板。在上面的例子中直接跳过了进场程序的解说,因此下一节里打算补充总结一下标准仪表进场程序STAR的有关知识。另外对于飞行员使用的仪表进近程序,也打算专门开一节些一下,因为这些知识对于理解飞机的飞行航线是非常重要的。
-
客机驾驶探秘5.1 下降准备
飞机不断接近目的地机场,机长和副驾驶要开始进行下降准备了。
一般来说下降准备和进近/复飞简令要在距离下降顶点之前10分钟内完成,以防止耽误开始下降的时机。
首先需要了解目的地的信息,如果当地天气恶劣发生像台风等无法降落的天气条件,或者刚刚发生了地震无法确保机场跑道安全等情况,机组就需要考虑飞往备降机场。
当地机场信息可以通过ATIS来获取。 自动终端情报服务 (Automatic Terminal Information System, 简称ATIS或情报通播) 是在繁忙的机场自动连续播放的信息服务,通常在一个单独的无线电频率上进行广播,包括主要的与飞行相关的信息,如天气、可用跑道、气压及高度表拨正值等信息。
正常情况下通播每半小时或者一小时更新一次,天气变化迅速时也可随时更新,依次以字母代码 A, B, C…Z 表示,按照ICAO公布的标准字母解释法判读。
飞行员获取ATIS可以通过ACARS数据链系统或者直接收听无线电台语音服务。
ACARS系统由一个称为ACARS管理单元(MU)的航电计算机和一个控制显示器单元(CDU)组成。MU用以发送和接受来自地面的甚高频无线电数字报文,数据通过显示器显示出来,另外也可以通过驾驶舱内的打印机把数据打印出来。(个人PC如果装有ACARS解码的软件其实也可以在家里接受ACARS信息,比如飞机的飞行速度高度经度纬度等等都可以看到。我比较推荐KG-ACARS这款免费软件,如果你有兴趣的话可以找来试试看。)
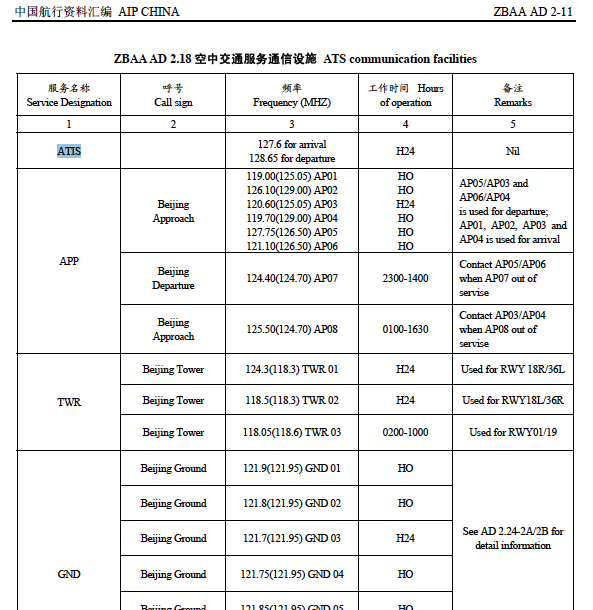
直接收听语音的话,就跟收听一般交通管制的对话一样,查找目的地机场信息里的ATIS频率,调节机上通信机至该频率,通过喇叭或者耳机就可以收听了。下面是北京首都国际机场的空中交通服务通信设施信息,可以看到ATIS有两个频率,127.6MHz和128.65MHz。
只要拥有一台支持航空波段的收音机,并且在机场一定范围内,就可以听到该机场的ATIS服务,一般来说它的<a href=内容是这样的(以我家附近的羽田机场为例):
“Tokyo International Airport,information Kilo,2130, ILS Zulu Runway 34L approach, Landing Runway 34L, Departure Runway 05 and 34R, Departure Frequency, 126.0 Runway05, 123.8 Runway34R Wind 180 degrees 6 knots, Direction variable between 160 and 230 degree, Visibility 9 km, Few 1 thousand 5 hundred cumulus,Bkn 14 thousands altocumulus Temperature 20, dewpoint 15 QNH 29.80 inches Advise you have information Kilo”
简单翻译一下,意义如下:
机场名 Tokyo International Airport (东京国际机场) 信息代码 information Kilo (信息代码为K) 观测时间 2130 格林威治时间21点30分发布 预计进近类别 ILS Zulu Runway 34L approach 使用仪表导航ILS Z 34L跑道进近程序 使用跑道 Landing Runway 34L, Departure Runway 05 and 34R 起飞跑道34L号,降落为05和34R号 通知事项(出发频率等) Departure Frequency, 126.0 Runway05, 123.8 Runway34R 出发用塔台频率,05号跑道使用126.0MHz,34R号跑道使用123.8MHz 其他重要事项(跑道路面情况,刹车效应,故障信息等等) 无 气象信息 地面风向,风速 Wind 180 degrees 6 knots 风向180度(南风),风速6节 风向,风速变化 Direction variable between 160 and 230 degree 方向在160度和230度之内变化 能见度,跑道视程 Visibility 9 km (5公里以下单位为米,以上为公里)9公里 现行天气 云盖度,云底高 Few 1 thousand 5 hundred cumulus,Bkn 14 thousands altocumulus 少量云层高1500英尺的积云,高积云多云14000英尺高 大气温度,露点 Temperature 20, dewpoint 15 温度20度,露点15度。 高度表拨正值 QNH 29.80 inches 天气趋势 特殊信息 信息代码 Advise you have information Kilo
※露点指空气中所含的气态水达到饱和而凝结成液态水所需要降至的温度。在这温度时,凝结的水飘浮在空中称为雾、而沾在固体表面上时则称为露,因而得名露点。相对湿度越高,露点会越接近气温;当相对湿度达到100%时,露点与气温相等。露点被用作计算引擎结冰以及出现雾的可能性,因此,对飞行员而言露点是一项重要数据。
-
客机驾驶探秘4.9 驾驶舱内
飞机进入巡航阶段之后,虽然飞行员还是要不断监控各种飞行数据,但是驾驶舱内的气氛比起起飞阶段时肯定要轻松一些了。到达下一个检查点之前,利用简短的休息时间,飞行员可以吃饭,要一些饮料,上厕所,也可以聊聊天什么的。
飞行员的食物有一点要知道的是,机长和副驾驶是绝对不能吃同一种机内餐的。这主要是为了防止万一发生食物中毒等意外时,两个飞行员都不能继续完成驾驶任务的情况发生。当然现在航空公司提供的机内饮食质量肯定是没有什么问题的,但是为了安全还是要严格执行这条规定。因此当乘务员来到驾驶舱询问飞行员,比如今天的机内餐是中餐和西餐两种,因此如果机长决定点中餐的话,那么副驾驶就自动要吃西餐了。
飞行员用餐的时间也是分开的,比如当机长用餐时,副驾驶就要全面负责驾驶任务,当机长用餐完毕,两个人的职责再调换过来,副驾驶用餐,机长全面负责驾驶。当然在飞行中,飞行员是不可能象在饭馆里一样可以慢慢享受美味的,一般来说他们都会匆匆吃完,而且在用餐当中也会眼中时刻监视眼前的飞行仪表,竖起耳朵聆听空中管制通话,随时应付可能会发生的情况。
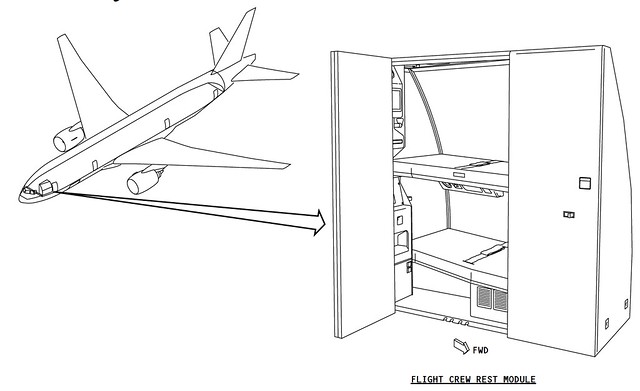
一般国内航班都是短程的,所以两名飞行员就足够了。但是远程国际航班,比如到欧洲美国的航班飞行时间都要10个小时以上,这时就需要配备3名飞行员编成,采用轮流操作的方式完成任务。此时的构成一般为2名机长(A,B),一名副驾驶,首先由一名机长(A)和一名副驾驶先负责驾驶,而另一名机长(B)休息。当B机长休息4个小时以后,他和A机长换班,A机长去休息4个小时,B机长做到左侧机长席。4个小时以后A机长重回机长席,而副驾驶可以去休息了,这时B机长就会做到副驾驶席上完成剩下的路程任务。
飞行员休息时一般没有什么特别具体的规定可以干什么,所以飞行员会根据自己的喜好,有人去睡一会儿,有人会去看看书报杂志,听听音乐什么的。 下图为波音777的位于驾驶舱后面的乘员休息间,可以看到它由2层上下铺组成,内部空间还是比较宽敞舒适的。
机长和副驾驶各自的工作分担不同,但是有时需要两个人之间交换任务,比如机长在进入巡航之后对机上乘客广播的时候就需要把飞机的驾驶交给副驾驶负责,副驾驶在使用航空公司专用通话频段与公司联系时需要把空中管制的通话交给机长负责,当然用餐等更是如此,这时两人之间会发生这样的对话,如 机长:“You have control” 副驾驶:“I have control” 或者 副驾驶:“You have ATC” 机长:“I have ATC” 等等。 再比如当接受到空管要求更改航路通知以后,副驾驶在FMC/CDU上修改好航路,请求机长复查时也同样会用到这样的对话。
我非常敬佩的东航资深机长刘志敏 “楞娃一个”曾经在微博上说过这样一句话,很好的总结了飞行员的工作--"机长的职责就是识别危险源,采取控制措施,把风险控制在可接受范围内。"
空中有可能会发生紧急情况的一个就是乘客中出现急病的情况,如果乘客中有医生的话可以作一些暂时的处置,但是如果没有医生或者需要紧急送医院治疗的话,飞行员就需要改变航路,寻找符合条件的附近的机场,联系空中管制,执行紧急降落程序等等。
如果航班目的地发生了什么异常情况,比如恐怖事件/地震/恶劣天气等,飞行员也需要判断本次航班是否需要继续飞行还是返航会出发地。航线临界点(即最大返航点,Point of No Return)是根据飞行速度风向等事先计算好的航路时间的中间点,比如定在格林威治时间16点25分,如果在临界点之前发生了什么异常的话,飞行员可以执行返航程序,但是如果过了这个点的话,飞行员就必须继续向目的地方向飞行,并不断收集最新信息以判断是否需要备降等情况。
飞行员对于飞行中可能各种危险和异常情况,都接受过严格的模拟训练,而且为了保持驾驶技术不致下降,他们还必须定期接受每年两次的紧急模拟训练。大家都知道现代的飞行模拟器已经非常先进,外部视野,仪表,控制设备,飞机姿态等等都很真实机体没有什么大的区别。在以往模拟器技术不够成熟的时期,紧急情况下训练都是在真实飞机上进行的,但是在现代模拟器上已经可以高效率低投入的达到同等训练水准。另外模拟器上还可以模拟在真实飞机上不可能做到的训练,比如发动机着火,机体损伤等,这些训练对飞行员对付各种异常紧急情况的技术的提高都有很大作用。训练中飞行员需要精神高度集中,每做完一次这种训练一般他们都会累的大汗淋漓,可见这种训练的真实度和严格性。
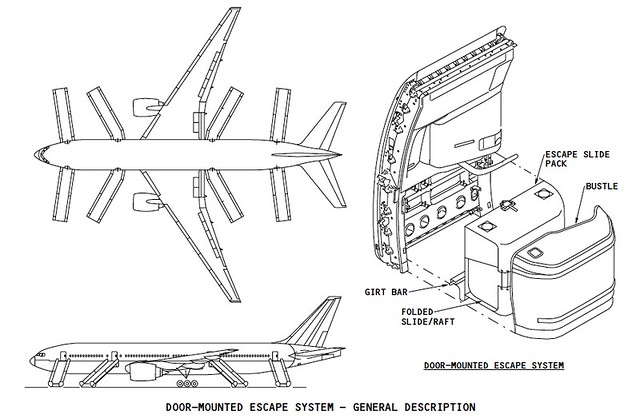
顺便提一下著名的90秒规则,即在旅客座位数大于44座的每个型号飞机,都必须能够使包括机组成员在内的满载量乘员在90秒(含)以内撤离飞机。不能达到这个条件的飞机就通不过各国政府航空部门的试航批准,是不可能投入到旅客运营之中的。客机上除了登机门货舱门等以外还有平时不开专为紧急情况发生后才开启的应急出口。最近看新闻说中国某乘客还因为好奇还擅自打开了飞机的应急口,真心希望同胞们能够多普及些航空知识,不要再做出这种无知的行为啊。 下面为波音777-200型客机的各应急口和应急滑梯的位置示意图:
121.5兆赫频率是应急专用通话频段,空中交通管制部门随时监听该频率以应付各种异常情况。一般来说大型飞机也都会一直监听这个频率,如果发生任何不测,威胁人命安全,无法自救,需要立即救援时,应该把雷达应答机号设为7700,并以mayday来呼叫并请求救援,如 "Mayday,Mayday,Mayday,abc1234,abc1234,engine failure,force landing to xxxx, request search and rescue" 意思是"Mayday,abc1234航班发动机停机,迫降某地xxxx,请求搜索救援" 要注意这里Mayday和自己的航班号要呼叫3遍。 比起Mayday紧急度要低一些的情况可以使用Pan-Pan求援,如 “Pan,Pan,Pan,abc1234,abc1234,abc1234,over xxxx,4500feet,engine trouble,request landing priority to xxxx airport” 意思是"Pan,Pan,Pan,abc1234航班,xxxx上空4500英尺,发动机故障,请求优先着陆到xxxx机场", 空管接到请求以后,对空中收听的所有飞机会发出如下通知, “All aircraft concern to xxxx tower,keep radio silence until further advice due to emergency situation occur” 即由于发生紧急情况要求其他飞机都保持静默直到有新的通知为止。
-
客机驾驶探秘4.8 关于气象和颠簸(续)
上一节在解释颠簸的成因时没有提到积雨云,因此这里再补充一下。
 积雨云外观上非常壮观,作为自然景观来说是非常有魅力的,但是对于飞机来说飞进积雨云里将是一个非常危险的事情。因为积雨云中有非常强烈的上升气流和下降气流在交互存在,其能量可能会对飞机机体产生巨大损伤甚至造成机毁人亡的的灾难。即使不飞入积雨云,只是在云层上飞行或者从旁边通过也可能发生会令乘客受伤的强烈颠簸。另外云中的冰雹,云层附近的雷电也会对飞机的机体产生伤害。
积雨云外观上非常壮观,作为自然景观来说是非常有魅力的,但是对于飞机来说飞进积雨云里将是一个非常危险的事情。因为积雨云中有非常强烈的上升气流和下降气流在交互存在,其能量可能会对飞机机体产生巨大损伤甚至造成机毁人亡的的灾难。即使不飞入积雨云,只是在云层上飞行或者从旁边通过也可能发生会令乘客受伤的强烈颠簸。另外云中的冰雹,云层附近的雷电也会对飞机的机体产生伤害。
飞行员主要利用气象雷达来回避积雨云,但是如果遇到如巨大的高墙一样耸立在航路前方时,这时将无法采取上一节介绍的大幅改变航路的方法,因此飞行员会点亮客舱的安全带灯,要求乘客和乘务员坐好在座椅上。飞行员这时主要采用手动操纵,聚精会神在云中寻找空隙,左右腾挪,尽量寻找颠簸小的空域,一直到穿过云区。有时候飞行员经过一番搏斗,安全通过云区,机内一点都没有产生颠簸,但反而不了解内情的乘客可能会抱怨说"让我们一动不动坐在座位上,其实一点都没摇不是",好像飞行员的预测不准一样。殊不知这是飞行员艰辛工作的成果,大家千万不要误会啊。
积雨云的成因和形状因地域不同各异,大陆和海上,温带和热带,白天和夜间,飞行员需要理解很多气象条件。比如美国大陆的积雨云就很有特色,由墨西哥湾上空产生的具有大量水蒸气的气流和大陆中部的干燥空气相遇,会产生巨大的直径达到200公里的一个单独的积雨云。如此巨大的云层,飞行路线一定要回避这个区域。在比如日本海上空冬天的积雨云,云层高度并不很高,因此从远处看过去其存在并不明显。有时候海上还有大片的层云,而积雨云会隐藏在层云里,此时从上空往下看,有时云中会有很多的空洞,这些就可能是积雨云。
关于飞行员对颠簸的对策,这里也再作一些补充。
当颠簸发生以后,飞行员需要判断是继续在相同高度飞行,还是上升或者下降到一个新的高度巡航。这时需要飞行员对记住天气图,尤其是立体的天气图情报,并且正确分析出颠簸的原因。因此在飞行中,飞行员需要不断注意风速风向和外气温度的变化,观察外部云的外形,收听ATC通话,收集各种信息以做出正确的判断。
比如冷、暖气团间相接触的狭窄的过渡地带,即"锋面",具有一个倾斜的角度。一般来说如果外气的温度下降之后开始颠簸,那么下降高度会尽快通过颠簸区域。如果温度上升之后开始颠簸,那么上升高度会尽快通过改锋区。

关于高空急流jet stream,会形成一个类似高速流动的空气管道的形状。在飞入或者飞出这个管子的时候会产生一定的摇动,但是一般来说进入到它的中心部的话就会非常稳定,不会产生颠簸。但是当风速超过90公里/小时以后,很有可能会发生颠簸。这时候的飞行就一定要非常小心,特别注意PFD显示器上的马赫数显示。因为音速是随着温度而变动的,如果马赫数数值开始一会儿变大一会儿变小,就说明附近空气的温度开始发生微妙的变化,飞机穿行在气团和气团之间时就可能发生颠簸。
观察上空飞机云的形状也是十分重要。如果飞机云形成之后较长时间形状没有太大变化就说明该高度气流稳定,飞行也就很安定。而如果飞机云的形状很快变形散开,那么该高度就很可能发生颠簸。

当航路上出现积雨云需要采取回避措施时,往往在雷达管制下会申请要求新的方位。因为在ND显示器中可以看到积雨云的位置,比如飞行员认为磁方位250度方位能够回避开积雨云,就会通过ATC向管制员行进申请,比如 “ABC Air 37, Request heading 250 due to cloud”。管制员同意该申请的话,往往会回答 “ABC Air 37,Flying heading 250, report clear of weather”,要求飞行员完成回避完后再次报告情况。因此飞行员改变航路后并确认前方没有积雨云存在后,会向管制汇报 “ABC Air 37, Clear of weather”。如果完成回避后,准备向右转回到原航路,可以汇报 “ABC Air 37, Accept right turn"告诉管制已经做好随时可以转弯的准备,于是管制员会指示给飞行员新的方位角或者航路点信息。
如果飞机在大洋上空飞行或者没有雷达管制的区域时,飞行员可以使用离开航路多少距离的方法申请回避路线,比如 “ABC Air 37, request deviate 10 miles right of track”,即要求沿原航路右侧10英里处飞行。管制员会回答如 “ABC Air 37,10 miles deviation right of track approved"来批准飞行员的要求。
刚刚虹桥落地,遇到了非常标准的夏季单体热雷暴⛈⛈ pic.twitter.com/b8zNWdFtFu
— 老堪不知道β-HMX是啥 (@candyshadow) July 19, 2017在2.7 起飞许可一节之中,曾经介绍过现代客机都装备了机载防撞系统TCAS(Traffic Alert and Collision Avoidance System),飞行员可以通过TCAS看到在自己周围飞行的飞机以及高度。大多数飞机飞行的高度一般来说都是比较安定的高度,那么参考这些数据也是一个判断巡航高度的好方法。
-
客机驾驶探秘4.7 关于气象和颠簸
有过飞机乘坐经验的人一般都经历过空中的颠簸,这可不是个好的体验。 这一节就专门介绍一下气象和颠簸方面的知识。
一般来说飞机在经过恶劣天气的空域时,机体会发生轻微到激烈的震动,严重时会把坐在座位上的乘客弹起来。如果运气不好的话,甚至会发生乘客骨折受伤,机体损伤的情况。即使没有达到受伤这样的严重情况,长时间的颠簸也会使人体感到不适,更多时候令乘客产生心理上的不安。 所以飞行员在执行任务时会时刻注意回避不良天气的空域,尽量为乘客提供一个安全舒适的旅程。 当然了,飞机的结构上的强度足以应付颠簸,飞行安全上是没有问题的。
关于颠簸一般有几种情况,让我们逐个看看。
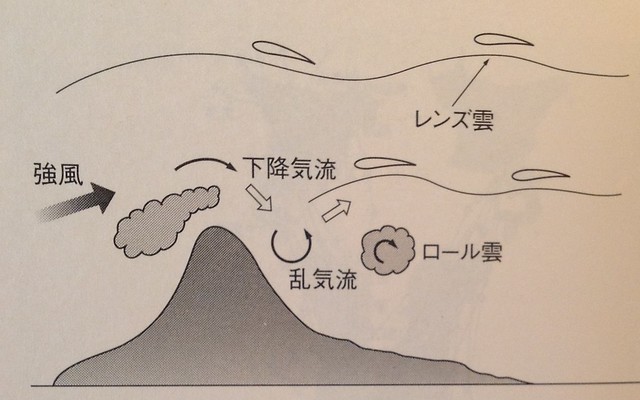
首先是背风波(Lee wave)。 在山脉背风坡的上空形成的空气波动即乱气流称为背风波。在静力稳定条件下,当空气被迫越过山岳而移动到背坡,其个别气块将离开平衡位置而作浮力振荡时,在山岳背风坡会形成重力内波。其形成与大气层结、风向风速和山的大小、坡度等条件有关。当风速较大且与山脊垂直时,使气流受扰动较强,有利背风波形成;山高坡陡更可使背风波的振幅增大。在背风波形成时,常可出现与山脊平行且与无云区相间出现的荚状云或波状云。
日本的富士山是一个经常发生背风波的典型,而受富士山背风波影响曾经发生过英国海外航空911号班机空难事件,这架注册编号为G-APFE的波音707飞机当时自日本羽田机场起飞准备继续其飞往香港的航段,在起飞之后没多久因为卷入乱流机身强度无法负荷而导致机身解体并坠毁于富士山麓,全机113名乘客以及11名机员全数丧生。
知道了背风波的危害,在航路准备阶段,航空公司都会饶过易发区域,比如饶过富士山顶从北面或者南面通过。
下一个要注意的是对流层顶(tropopause)。 对流层与平流层之间的过渡层,其厚度为数百米到1~2公里,其高度随纬度和季节变化很大,一般来说,热带高于极地,夏季高于冬季,白天高于夜间。对流层顶,就像一个分水岭。在它的上面是平流层,晴空万里,气流平稳,温度随高度的增加而增加;在它的下面是对流层,云雨雷电,变幻万千,温度随高度的增加而降低。一般而言,空气的特性决定了温度高的空气在上层,稳定;温度低的空气在下层,不稳定。因此,平流层稳定,而对流层不稳定。对流层顶在对流层和平流层中间,指示着上下的天气状况。
对流层中的云,一般向上移动到对流层顶就停止了,所以积雨云的砧状云顶,往往和对流层顶的高度一致。积雨云对飞行危害很大,但可以根据对流层顶的高度,大致判断积雨云云顶可能出现的高度,在飞行的时候尽量避开。
对流层顶的高度变化,即所谓对流层顶坡度,也与对流层天气密切相关。暖空气团上方的对流层顶一般较高,冷空气团上方的对流层顶一般较低。对流层顶高度急剧变化甚至断裂,往往预示着下层某个高度有高空急流和颠簸存在。飞机在穿越这些区域时,就可能受到较大影响。
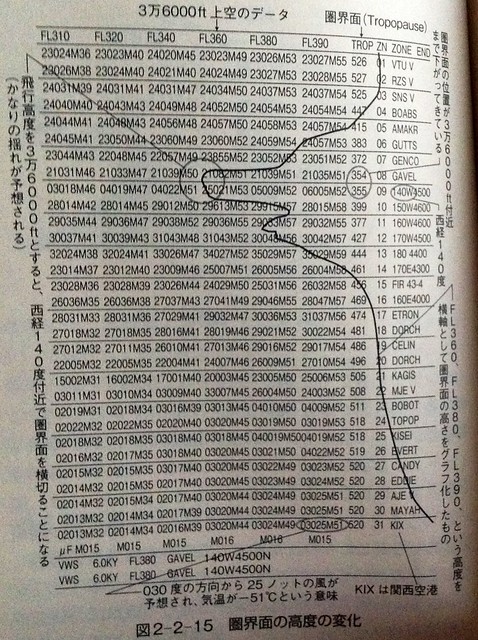
让我们看一个实例。下图中GAVEL航路点处的对流层顶高度为降低到35400英尺,此时的巡航高度如果是36000英尺的话,西经140度附近的飞行就一定要小心。
换一个角度再来看这个数据,
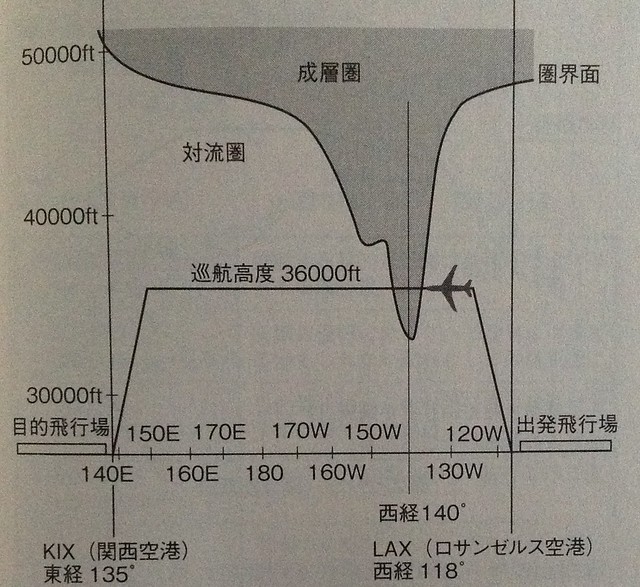 以巡航高度和对流层顶高度的关系图看上去比较容易理解,对流层顶坡度之大一目了然。
从洛杉矶机场起飞,以36000英尺巡航高度向西,经过西经140度时会穿过对流层顶。
以巡航高度和对流层顶高度的关系图看上去比较容易理解,对流层顶坡度之大一目了然。
从洛杉矶机场起飞,以36000英尺巡航高度向西,经过西经140度时会穿过对流层顶。下面再介绍一下记载雷达。 现代客机上都装备了气象雷达,可以为飞行员提供航路上以及附近空域的气象信息。如下图所示,机载气象雷达天线位于机首的雷达罩内,
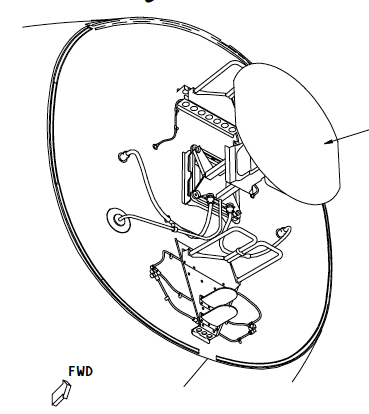 利用电磁波经天线辐射后遇到障碍物被反射回来的原理,目标的导电系数越高,反射面越大,则回波越强。
雷达可以探测飞机前方航路上的气象目标和其他目标的存在以及分布状况,并将所探测目标的轮廓、雷雨区的强度、方位和距离等显示在显示器上。
利用电磁波经天线辐射后遇到障碍物被反射回来的原理,目标的导电系数越高,反射面越大,则回波越强。
雷达可以探测飞机前方航路上的气象目标和其他目标的存在以及分布状况,并将所探测目标的轮廓、雷雨区的强度、方位和距离等显示在显示器上。
一般在ND(导航显示器)中以不同颜色来显示出各种不同天气条件,比如红色区域表明降水量超过12mm/h以上,黄色区域表明降水量在4~12mm/h之间,绿色表明表明降水量在1~4mm/h之间,紫色表明有不稳定气流。
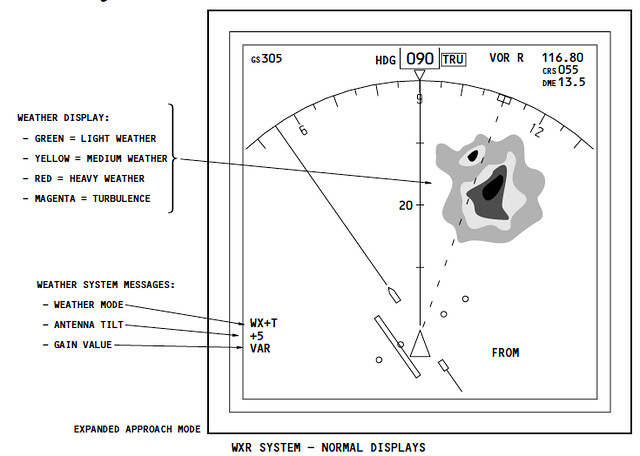
 飞行员发现航路前方空域有黄色红色紫色时一般都会考虑采取回避措施。
飞行员发现航路前方空域有黄色红色紫色时一般都会考虑采取回避措施。
上面介绍的情况因为能事先查知,飞行员可以在执行任务时绕开这些空域,但是还有一种没有事前征兆,在无云条件下,雷达探测不到,突然发生的乱气流,即晴空乱流CAT。
晴空乱流比较容易出现在伴随着高空急流jet stream急速发展中的低气压的东北方向,
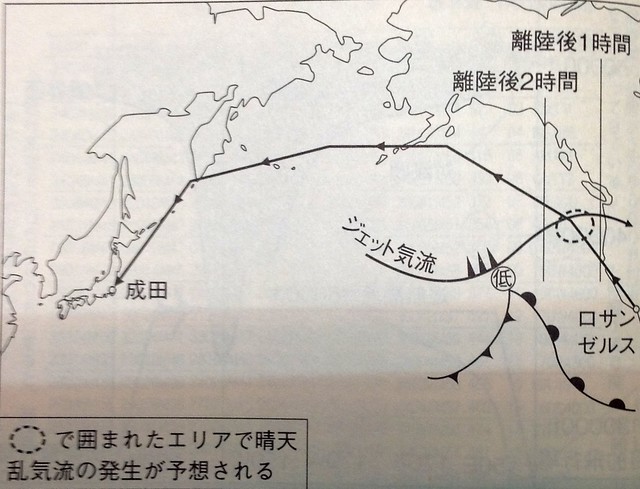 比如上图中,可能发生晴空乱流的区域以虚线画出来,预测上从洛杉矶起飞大约1个半小时后会通过该空域,但是从航路上因为无法饶过该处,因此通过此空域时,飞行员会点亮安全带灯,并且机内的饮食服务的时间也会避开这段时间,以保证乘客和乘务员安全。
比如上图中,可能发生晴空乱流的区域以虚线画出来,预测上从洛杉矶起飞大约1个半小时后会通过该空域,但是从航路上因为无法饶过该处,因此通过此空域时,飞行员会点亮安全带灯,并且机内的饮食服务的时间也会避开这段时间,以保证乘客和乘务员安全。最后再介绍一下飞行员更改航线时的操作。首先机长和副驾驶调查新的航路,比如原本的航路点是ABCD4个通过点,B点附近发生了乱流,于是决定饶过B点从附近几十公里以外的E点通过。但是这变更需要得到空管的许可,空管得到飞行员的申请后,需要调查是否有别的航班在相同高度的E点飞过,因此得到正式的许可需要等待一些时间。同时飞机本身在以近900公里的速度高速飞行,得到许可后如果已经大幅通过A点就会可能需要大角度急转弯飞向E点。这类似过山车一样的飞行对乘客来说可不是一个舒适的体验,飞行员一定要注意,时时监视雷达的显示,需要时尽早得到许可,尽快把航路信息输入飞行管理计算机。
为了获得各种空中的天气情报,与别的航班在相同空域中飞行的飞行员通信也是非常重要的。飞行员会使用一个特殊的频率,123.45MHz,因为这个频率不分国籍不分航空公司,是为了飞行员之间通话的专用频率。比如同一方向飞行的几架飞机中,最前面一架如果遇到了乱流,这架飞机的飞行员会通过这个频率通知后面的飞机注意,于是后面的飞机的飞行员会提前亮起安全带灯,提醒乘客们注意颠簸,因此提高了飞行的安全性。
另外这个频率不光是乱流,其他紧急情况的利用也是可以的。比如某架飞机上出现了急病的乘客,而该飞机上没有医生,那么飞行员可以通过这个频率呼叫别的飞机,如果有医生在的话可以帮助紧急救护病人。
Prev: 关于燃油消耗和重心 TOC: 目录 Next: 关于气象和颠簸(续)
完
{kind=link}