フライトシミュレーター愛好家のノート
-
X-Planeは左右燃料タンクの燃料消費をリアルに再現している
私がずっと気に入っている掲示板で、左右燃料タンクの燃料消費量に関する議論がありました。 あるユーザーが、セスナ172でしばらく飛行した後、左右のタンクの残量がアンバランスになっていることに気づきました。 そこで一人のパイロットが、もし巡航中に機体が水平飛行を維持できず、 常に左右に揺れていると、左右の燃料タンクの消費に不均衡が生じると説明しました。
X-Planeがここまで正確に燃料消費をシミュレートできるとは、本当に驚きです。 私も今後は燃料計の表示をよく観察しようと思います。
掲示板での議論はまだ続いています。例えば、小型機の燃料タンクセレクターには「左・中・右」の3つの位置があります。 なぜ3つの位置が必要なのでしょうか?
これは「ベーパーロック(Vapor Lock)」現象に関係しているそうです。航空燃料は揮発性が高く、 高度が上がるほど気圧が低下するため、地上よりも燃料が気化して気泡が発生しやすくなります(例えば高原では、100度未満で水が蒸発するのと同じです)。 この気泡が詰まりを生じさせ、燃料の流れを悪くし、最悪の場合、エンジンの停止さえ引き起こすことがあります。
そのため、長距離飛行中は、頻繁にタンクセレクターを左右に切り替えることで、気泡による詰まりのリスクを減らすことができます。 切り替えを忘れないための工夫として、セレクターを時計の針に見立てる方法があります。 分針が0分から30分の間は右タンクに、 30分から60分の間は左タンクに切り替えるのです。
また、離陸、上昇、着陸時には、中央の位置に設定する必要があります。これは左右両方のタンクから同時に給油するためです。
完
-
旅客機操縦の探秘4.4 巡航高度について
一般的に、短距離の国内線では巡航高度はほぼ一定です。前のセクションで紹介したように、巡航に入ってから降下および着陸を開始するまで、悪天候や緊急事態がない限り、航空機はその高度を維持し続けます。しかし、遠距離の洋上国際ルートでは、段階的に高度を上げる「Step Up Cruise」(ステップアップクルーズ)が採用されることがよくあります。ここで、ボーイング777-300ERによる東京からニューヨークへのフライトを例に、高度がどのように割り当てられているか見てみましょう。
燃費効率を考慮すると、航空機は低高度よりも高高度の方が航続距離が長くなります(燃費が良い)。しかし、長距離ルートを飛行する場合、短距離よりも多くの燃料を搭載する必要があります。大重量の状態で無理に一度に高迎角で巡航高度まで上昇させると、かえって燃費効率が悪化します。ある重量において航空機には最適な高度指標があり、燃料の消費に伴って機体重量が低下するにつれ、その重量時の高度指標に従って高度を徐々に上げることで、最良の経済性(燃費)を得ることができます。
以下の図を例に見てみましょう。このボーイング777の離陸重量は343トンで、離陸20分後にまず31000フィートまで上昇し水平飛行に入ります。これは、この高度がこの時点での重量に対して最も経済的だからです。2時間50分後、32000フィートへ上昇します。32000フィートで1時間10分間飛行した後、機体重量は298トンまで低下し、航空機は33000フィートへ上昇します。33000フィートで約4時間間巡航した後、重量は266トンまで低下したため、再び37000フィートへ上昇します。37000フィートでは目的地に近づいているため、40分強という短い飛行時間でしたが、全体的な燃費効率は依然として良好でした。
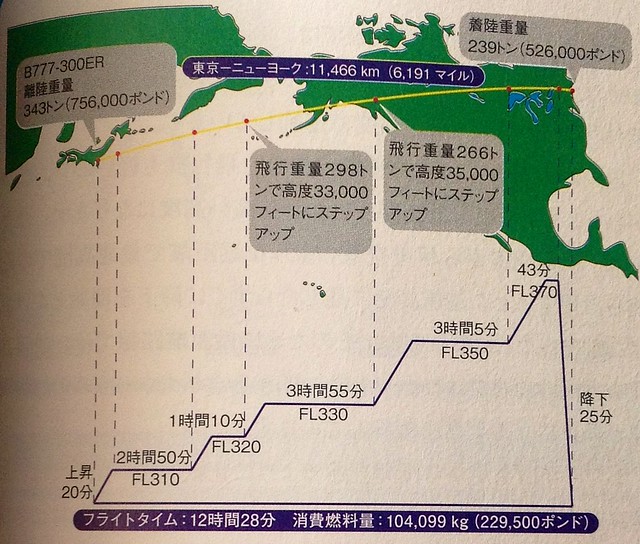
上の図から分かるように、段階的に巡航高度を上昇させるこの方法では、飛行時間が12時間28分、燃料消費量は105トンでした。これに対し、ずっと31000フィートで巡航し続ける方法と比較して、2分の飛行時間と1.7トンの燃料を節約できました。
今後、飛行機で移動する際は、外のエンジン音に注目してみてください。もし1、2分間だけエンジン音が急に大きくなったら、パイロットが巡航高度を調整して上昇している可能性があります。機内エンターテインメントシステムの高度表示に注意を払い、時折記録すると良い習慣になります。
短距離フライト(例えば東京から大阪まで、1時間もかかりません)でも、高度と燃費効率の問題は存在します。この場合、搭載燃料量が少なく、航空機は高高度へ到達しやすいですが、目的地が近いため、せっかく空気抗力の少ない高度まで上昇しても、すぐに降下しなければならず、結果的に全体的な燃料消費としては割に合いません。したがって、上昇、降下、巡航をすべて含めたトータルの燃料消費が最適になる高度を選択する必要があります。
比較的長い航路では高い高度を採用できますが、時にはジェット気流の存在に注意する必要があります。
ジェット気流(Jet Stream)は、地球を囲む数本の強くて狭い高速気流の帯で、対流圏界面または成層圏に集中しており、中高緯度の偏西風帯内や低緯度地域に出現します。その水平規模は数千キロメートル以上、幅は数百キロメートル、厚さは数キロメートルにも及びます。中心風速は時速200~300キロメートルに達することがあります。高空で気流と逆方向に飛行することは、逆水行舟(川を逆流すること)のように航空機の対地速度を大幅に低下させますが、気流に乗れば大幅に速度を増すことができます。そのため、アジアから北米やカナダへ向かう航空機は、航路の短縮と燃料節約のためにこのジェット気流帯を利用し、帰路では北極ルートをとることがあります。
日本の国内線でもこの気流は利用されます。例えば、冬に東京羽田から福岡へ向かうフライトでは、ジェット気流を避けるために比較的低い高度を選択します。これにより、向かい風の気流速度は約100km/hとなり、高高度の気流速度の300km/hよりもはるかに低くなります。もちろん、帰路では高高度を利用して飛行することになります。
-
雲の色調整 cloud color
X-Planeで雲がどうも黒ずんで見苦しいと感じるなら、以下の設定方法を試してみてください。 おそらく、雲の設定が厚めで、かつ階層が多い場合に、雲が陰鬱な暗雲になりやすいのだと思います。
まず、Weatherメニューの左側にある雲の設定を見てみましょう。
 3つの高度層にそれぞれ「少量」、「少なめ」、「少なめ」の積雲を設定していますが、
操縦席から見ると、雲は比較的陰鬱な印象です。
3つの高度層にそれぞれ「少量」、「少なめ」、「少なめ」の積雲を設定していますが、
操縦席から見ると、雲は比較的陰鬱な印象です。

しかし、以下の設定を変更して雲を1層にすると、
 雲の色がずっと明るくなったことが明らかにわかり、晴れ日のような白い雲の効果にかなり近づきました。
雲の色がずっと明るくなったことが明らかにわかり、晴れ日のような白い雲の効果にかなり近づきました。
-thumb-640x469.png)
完
-
旅客機のコックピート探訪4.3 飛行高度と気圧、そして最大飛行高度
前回は速度に関する指標について説明しましたが、今回は高度に関するデータについて説明します。
航空機の高度計には、気圧高度計(barometric altimeter)と電波高度計(radio altimeter)の2種類があります。まずは気圧高度計を見てみましょう。
高度が上がるにつれて空気密度が減少し、それに伴って気圧も下がることは誰でも知っています。そこで大気圧を測定し、標準値と比較することで、測定地点の絶対高度値(海抜高度)を求めることができます。これが気圧高度計(altimeter)の基本的な動作原理です。気圧を使用して測定する利点は、高度計が小型で構造が簡単であることですが、欠点もあります。それは、高度以外に温度や水蒸気密度の変化も気圧の変化に影響を与えることです。そのため、航空機ではパイロットは必ず現地の実際の大気状況に基づいて気圧計の校正を行う必要があり、離陸前と着陸前には欠かせません。正確に把握できない高度での着陸がいかに危険であるかは言うまでもありません。
例を挙げましょう。前日が高気圧の晴れの日で、ある航空機が海抜高度6.4メートルの羽田空港に着陸した際、当時の気圧は1013ヘクトパスカル、機上の高度計は29.92インチ水銀柱に設定され、高度計は21フィートを表示していました。翌日に雨が降り始め、気圧が997ヘクトパスカルに低下したとします。もし校正を行わなければ、この時の高度計の表示は450フィートとなり、メートルに換算すると137メートルになります。海抜6メートルの地上に停まっている航空機の計器が、とんでもなく137メートルも表示していることになります。これが天候が高度計に与える影響の大きさです。したがって、離陸前にパイロットは必ず高度計を997ヘクトパスカル(29.45インチ水銀柱)に設定しなければなりません。この設定値の情報は、空港の航空管制官、航空会社のディスパッチャー、または空港のATISから取得することができます。
気圧に関してはいくつかの用語が頻繁に使われるので、以下に簡単にまとめます。
-
**“現場気圧QFE”**は、空港の水平面の気圧です。FEは"Field Elevation"で覚えることができます。パイロットがQFEの高度計設定を使って高度表を校正した場合、空港上では高度計の針は0フィートを指します。
-
**“修正海面気圧QNH”**は、国際民間航空機関(ICAO)が定めた標準大気に基づいてQFEを変換した値です。NHは"Not Here"で覚えることができます。前述した空港での高度計設定に使用されるのが、このQNH値です。パイロットがQNHの高度計設定を使って高度表を校正した場合、空港上では高度計の針はその空港の海抜高度を指します。これは航空図に記載されている空港データでもあります。したがって、空港付近での離陸、上昇、降下、着陸のプロセスでは、QNH値を基準として高度表を修正する必要があります。これにより、離陸および着陸するすべての航空機が同一の基準を使用して飛行高度を測定することになり、地上への衝突や航空機同士の衝突、異常接近などの事故を防ぐことができます。
-
**“標準大気圧QNE”**は、標準大気条件における海面の気圧を指します。その値は1013.2ヘクトパスカル(29.92インチ水銀柱)です。空港付近ではQNH値を基準にすることができますが、空港間を飛行する場合は気圧の変化は一定ではなく、地上や海上に無数の観測所を設けてQNHを測定することも不可能です。そのため、すべての航空機が統一された基準であるQNEを使用すれば、高度表の修正が簡素化され、空中の安全が保証されます。では、どのような条件下でQNHをQNEに調整するのでしょうか。規定では「遷移高度」が設けられており、QNHがこの高度を超えると、パイロットは高度計をQNE、つまり29.92インチ水銀柱(1013.2ヘクトパスカル)に設定する必要があります。また、各国によって遷移高度の規定は異なります。例えば上昇時、中国は3000メートル、日本は14000フィート、アメリカは18000フィート、イギリスは6000フィート、シンガポールとタイは11000フィートとなっています。
引き続きボーイング777を例に、実際の計器表示を見てみましょう。下の図のPFD(Primary Flight Display)で、高度表示は右側の高度ストリップの中央の四角い枠内にあります。
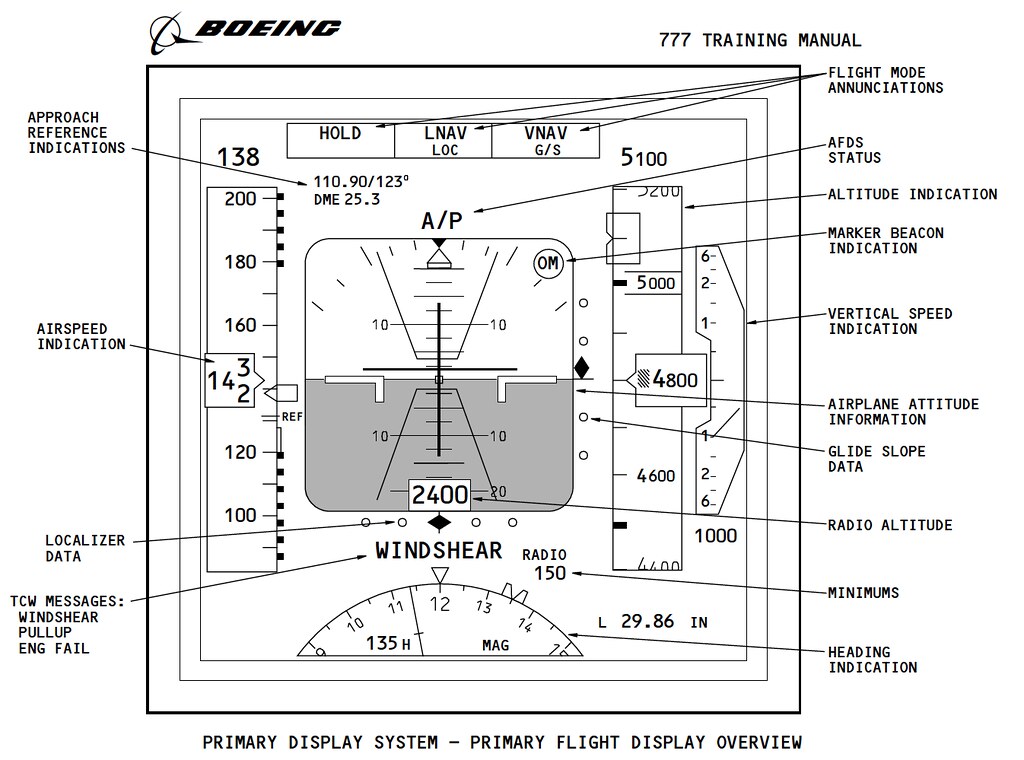 数字の"4800"は高度計が4800フィートであることを示しており、その下の"29.86 IN"のデータは高度計が29.86インチ水銀柱に設定されていることを示しています。これは、この時航空機がQNH値を使用していることを意味します。
数字の"4800"は高度計が4800フィートであることを示しており、その下の"29.86 IN"のデータは高度計が29.86インチ水銀柱に設定されていることを示しています。これは、この時航空機がQNH値を使用していることを意味します。次の図を見てください。高度計の部分だけを取り出し、それぞれの数字を具体的に説明しています。
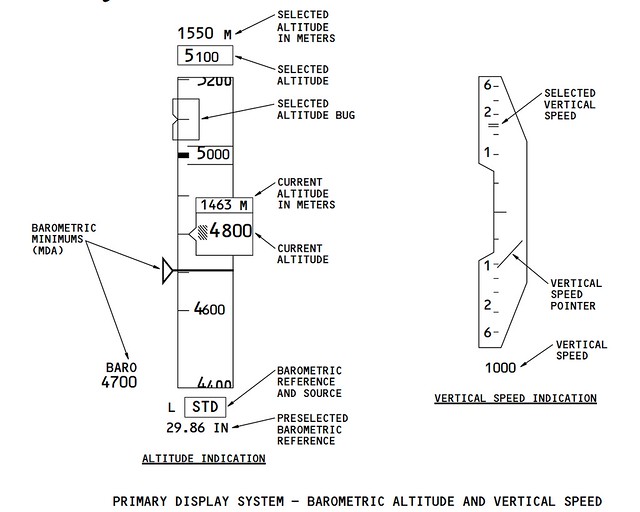 中央の四角い枠の中にある"CURRENT ALTITUDE"の矢印が指す数字"4800"は、高度計が4800フィートであることを示しています。その下にもう一つの枠内に"STD"と表示されています。これは、現在の航空機がQNEの標準大気圧を使用していることを示しています。同時に、STDの下にある"PRESELECTED BAROMETRIC REFERENCE"の矢印が指す"29.86 IN"のデータも見えます。これはプリセットされた高度計の値で、29.86インチ水銀柱に設定されています。パイロットは降下フェーズに入る前に、目的地のQNH値をセットしておくことができます。航空機が遷移高度を下回った後、切り替えボタンを押すだけで済むため、操作が大幅に簡素化されます。
中央の四角い枠の中にある"CURRENT ALTITUDE"の矢印が指す数字"4800"は、高度計が4800フィートであることを示しています。その下にもう一つの枠内に"STD"と表示されています。これは、現在の航空機がQNEの標準大気圧を使用していることを示しています。同時に、STDの下にある"PRESELECTED BAROMETRIC REFERENCE"の矢印が指す"29.86 IN"のデータも見えます。これはプリセットされた高度計の値で、29.86インチ水銀柱に設定されています。パイロットは降下フェーズに入る前に、目的地のQNH値をセットしておくことができます。航空機が遷移高度を下回った後、切り替えボタンを押すだけで済むため、操作が大幅に簡素化されます。
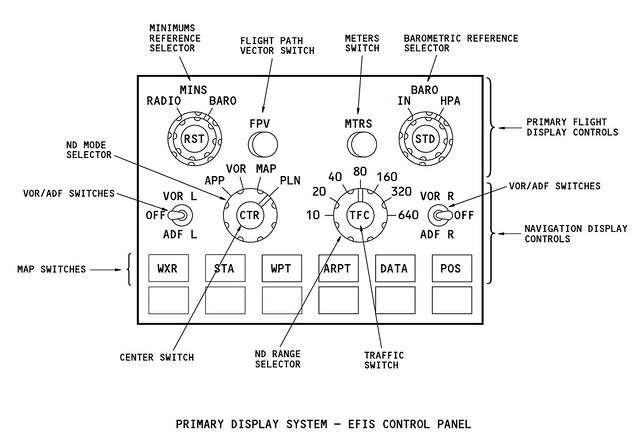 STDボタンは上の図にあるEFISコントロールパネルの右上方にあり、“BAROMETRIC REFERENCE SELECTOR"の矢印が指すBAROノブが高度表設定の場所です。
STDボタンは上の図にあるEFISコントロールパネルの右上方にあり、“BAROMETRIC REFERENCE SELECTOR"の矢印が指すBAROノブが高度表設定の場所です。高度の単位について、一般的に欧米や日本ではフィートを使用し、中国はメートルを使用しますが、QNE高度設定を使用する場合はFly Levelという言葉が使われます。Fly Levelを使用する場合、数字の後ろの2つのゼロは省略されるため、35000フィートはFly Level 350と呼ばれ、一般にはFL350と記されます。例えば3.7節の航空管制会話でこのような紹介があったことを覚えているでしょうか: “Tokyo Control,Air System 115,Leaving 7800 for FL210,Initially Proposed FL410” “東京センター、エアシステム115です。高度7800フィートからFL210へ通過中、最終目標高度はFL410です” ここでは7800、FL210、FL410を使って高度を表現しています。今なら意味が分かりますね。7800はQNH下での高度7800フィート、FL210はQNE下での高度21000フィートという意味です。
では、一般的に旅客機は最大どれくらいの高さまで飛べるのでしょうか。最大飛行高度、つまり「上昇限度」には2つの要素、揚力と機体強度が関係します。
航空機が飛行できるのは空気が存在するからです。エンジンが航空機を推進し、一定の速度に達すると、主翼に作用する気流が上向きの揚力を発生させ、航空機は上昇し続けます。しかし、高度が高くなるほど空気は薄くなり、エンジンに入り込む空気量が減るため、エンジンが発生できる推力も低下し、最終的に航空機が上昇できる限界に達します。この時、航空機は水平飛行しかできません。これが航空機の「実用上昇限度」という概念です。航空機の上昇速度が低下し、垂直方向の上昇率が300フィート/分(90メートル/分、人間が歩く速度と同じくらい遅い)に低下した時の高度が、実用上昇限度となります。したがって、同型の航空機であれば、エンジン出力が大きく、重量が軽いほど、実用上昇限度は高くなります。
機体強度は、航空機の内外の圧力差に関係します。1万メートル以上の高高度では、気温は約氷点下50度、気圧は地上の20%しかありません。そのため、旅客機内にエアコンと加圧設備で適切な温度と気圧を供給しなければ、乗客は生存できません。エアコンについては、一般的に客室内温度は24度が基準ですが、夏は薄着なので少し温度を上げ、冬は厚着なので少し下げる調整がされます。しかし、温度に比べると加圧調整の方が少し難易度が高いです。
例えば、客室内を常に1気圧に保ったまま上昇し続けるとすると、外部の気圧が低下し続けるため、内外の圧力差が作用して、航空機は風船のように膨らみ続けることになります。11000メートルでは内外の圧力差は8.1トン/平方メートルになり、機体に作用しますが、13000メートルの高度では8.7トン/平方メートルの力に達します。これには、航空機の機体強度がそれほど大きな圧力に抵抗し、変形しないことが求められます。同時に、フライトごとの上昇と降下に伴い、機体に作用する膨張と収縮の力が繰り返され、最終的には金属疲労を引き起こし、機体の破裂などの強度上の重大な問題を引き起こす可能性があります。
そのため、航空機の設計においては、高度の変化に伴い、外部の気圧の変化に合わせて機内の気圧も徐々に調整し、内外の圧力差の影響を軽減します。もちろん、気圧が低すぎると人体に不快感を与えるため、圧力を下げるとしても最低でも0.75気圧、つまり海抜2400メートルの高度相当の気圧までに抑えられます。実際の飛行高度と区別するために、この高度値は「客室高度」と呼ばれます。
したがって、航空機の最大飛行高度は、客室高度との圧力差によって決まります。例えばボーイング747の場合、機体の最大許容圧力差は6.1トン/平方メートルであり、客室高度を2400メートル以下に維持するための最大飛行高度は13750メートルとなります。
他の現代旅客機の最大飛行高度データも見てみましょう。 エアバスA380:圧力差6トン/平方メートル、最大高度13100メートル エアバスA330:圧力差5.8トン/平方メートル、最大高度12520メートル ボーイング777:圧力差6トン/平方メートル、最大高度13130メートル
以上です。
-
-
黄岩島パトロール?
前回は<a href="/blog/ja/2012/08/-flight-sim-diaoyu"フライトシミュレーターで尖閣諸島に行ってみたのですが、フィリピンとも領有権問題を抱える黄岩島も飛んでいけるかな? 今日調べてみたところ、X-Planeの世界地図はかなり優秀で、すぐに見つかりました。以下、飛行の様子をレポートします。
まずGoogleマップで黄岩島のおおよその位置を確認します。 <a href=“https://yinlei.org/x-plane10/2012/09/30/%E3%82%B9%E3%82%AF%E3%83%AA
-
NaturalPoint TrackIR 5 & TrackClip Pro ヘッドトラッキングシステム 設定
しばらく迷った末、最終的にTrackIR 5とTrackClip Proを購入しました。以下にMacでのインストールと使用方法を簡単にまとめておきます。(Windowsの場合は公式サイトからドライバーと設定プログラムをダウンロードできますが、Mac版はないため、オープンソースのものを探す必要があります。)
まず製品の紹介から。TrackIR 5はヘッドトラッキングシステムで、TrackClip Pro(送信部)とTrackIR5(受信部)の2つの要素で構成されています。X-Planeの3Dコックピットモードを使用する際、頭を少し上下左右に動かすだけで、動きに合わせて自動的に視点が切り替わるため、面倒なボタン操作やキーボード操作が不要になります。特に着陸時のトラフィックパターンでは、航空機と滑走路の位置を絶えず確認する必要がありますが、この周辺機器があれば、フライトシミュレーションのリアリティが大幅に向上します。少しおすすめしておきます。


<a href=“http://media.naturalpoint.com/files/print/trackir/tcp-quickstart-200612.pdf"ハードウェアのインストールは公式の説明を参照してください。ここでは詳しくは述べず、主にソフトウェアのインストールについて説明します。
まず、Mac用のアプリケーションソフトウェア「linux-track」――Software for head motion tracking on linux/MacOSX――をダウンロードします。 <a href=“http://code.google.com/p/linux-track/"<img src=http://code.google.com/p/linux-track/logo?cct=1330468024> <a href=“http://code.google.com/p/linux-track/downloads/list"ここから最新のソフトウェアパッケージ(例:linuxtrack120328.dmgなど)を見つけ、中にあるアプリケーションltr_gui.appをシステムのApplicationフォルダまたはX-Planeのメインディレクトリにコピーします。
ltr_guiを起動すると、以下のようなDevice Setup(受信部設定)画面が表示されるので、TrackIRを選択します。 <a href=
-thumb-640x543.png) 中央のFirmwareの部分を確認してください。ファームウェアがインストールされていない場合は、Installボタンを押して自動的にインストールします。インストール完了後は、Installボタンはグレーアウトします。
次にModel Setup(送信部設定)を設定し、TrackClip Proを選択します。
<a href=
中央のFirmwareの部分を確認してください。ファームウェアがインストールされていない場合は、Installボタンを押して自動的にインストールします。インストール完了後は、Installボタンはグレーアウトします。
次にModel Setup(送信部設定)を設定し、TrackClip Proを選択します。
<a href=-thumb-640x543.png) 続いてX-Planeのドライバーです。Miscタブで「Install Xplane plugin」ボタンを押すとファイル選択ダイアログが表示されるので、X-Planeの実行ファイル、つまりX-Plane.appの場所を指定します。
<a href=
続いてX-Planeのドライバーです。Miscタブで「Install Xplane plugin」ボタンを押すとファイル選択ダイアログが表示されるので、X-Planeの実行ファイル、つまりX-Plane.appの場所を指定します。
<a href=-thumb-640x540.png) それでは実際に試してみましょう。Tracking WindowでStartボタンを押します。ここにテスト用のコックピットがあるので、頭を前後左右に動かして、ビューの切り替わり具合を確認してください。
<a href=
それでは実際に試してみましょう。Tracking WindowでStartボタンを押します。ここにテスト用のコックピットがあるので、頭を前後左右に動かして、ビューの切り替わり具合を確認してください。
<a href=-thumb-640x491.png) TrackIRは6方向の設定調整が可能です。Tracking Setupで調整しながら、Tracking Windowでテストして、満足いくまで調整してください。
<a href=
TrackIRは6方向の設定調整が可能です。Tracking Setupで調整しながら、Tracking Windowでテストして、満足いくまで調整してください。
<a href=-thumb-640x542.png)
-
X-Planeの表示レンダリング設定 Rendering Options
X-Planeの表示機能は強力ですが、派手なシーナリーや空の美景を追求する場合、ハードウェアに対する要求は高くなります。必ず高性能なグラフィックボードを購入し、大容量のビデオメモリを搭載する必要があります。しかし、私は主にフライトのリアリティを重視しているため、多くの設定をオフにしています。以下に私の設定を記載しますので、皆様の参考にしてください(画像をクリックすると拡大表示されます)。
<a href=
-thumb-660x500.png) 特殊効果の設定が基本的にチェックされていないこと、地上のオブジェクト数もごく少数に設定されていることがお分かりいただけると思います。これは主にフライト操作の滑らかな動作を保証するためです。
特殊効果の設定が基本的にチェックされていないこと、地上のオブジェクト数もごく少数に設定されていることがお分かりいただけると思います。これは主にフライト操作の滑らかな動作を保証するためです。なお、私使用しているマシンはMid 2011年製の27インチiMacで、グラフィックボードはAMD Radeon HD 6770M(512MB GDDR5 ビデオメモリ)です。正直なところ、グラフィック関連の構成は高くありませんが、現時点では大きな問題を感じていません。2Dコックピットではフレームレートは60〜70、3Dコックピットモードでは30代です。
フレームレートの確認設定方法は以下の通りです。SettingsメニューのData Input & Outputを開きます。
 frame rateにチェックを入れます。
frame rateにチェックを入れます。
 これで画面上に関連データが表示されます。
これで画面上に関連データが表示されます。

以上
-
小型単発プロペラ機のプロペラ後流とP因子効果について――なぜ私の飛行機は常に左に偏るのか?
フライトシミュレーターを始めたばかりの友人たちは、小型の単発プロペラ機が「地上での加速滑走/離陸/離陸後」に直進せず、絶えず左に偏ってしまう問題に遭遇することがよくあります。では、まずおめでとうございます。あなたが使用しているソフトウェアは、航空機の空気力学的効果をリアルにシミュレートしています。あなたは良いソフトウェアを選びました!
もちろん、X-Planeはまさに空気力学をリアルにシミュレートするソフトウェアであり、その商用版はアメリカ連邦航空局(FAA)によってパイロットの正式な訓練用シミュレーターとして認定されていることを知っておく必要があります。私たちが一般的に使用している家庭用版と商用版のX-Planeの飛行制御モデルは同じであるため、X-Planeを使用すると極めてリアルな操縦感が得られます。もちろん、プロペラ後流とP-Factorも含まれます。私がよく注目しているある海外のX-Planeフォーラムでもリアリティについて議論があり、商用ライセンスを持つパイロットたちもこのソフトウェアを絶賛していました。
さて、以下では右回転プロペラ機を例に、その原理と対処法について説明してみましょう。
プロペラ後流とは、プロペラが回転する際、ブレードが空気を掻き、一方で空気を後方に流し、他方で空気をプロペラの回転方向に沿って機体の周りをねじるように流れる現象です。このプロペラの作用による気流の加速とねじれをプロペラの後流と呼びます。
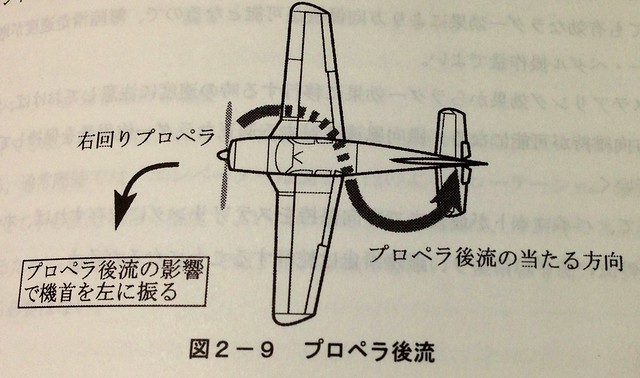
プロペラによるねじれた気流が航空機の垂直尾翼の片側に当たると、反作用力の効果により、航空機の方向が偏転します。上図のように、プロペラが右回りである場合、ねじれた気流の下層は右から左側へ向かってねじれ、左方向から垂直尾翼に作用し、尾翼に右向きの空気力を発生させ、航空機の重心に対して右への偏航モーメント、つまり機首が左に偏転します。プロペラの回転数が大きいほど、ねじれた気流が航空機の方向偏転に与える影響は顕著になります。
航空機が地上で離陸や滑走の準備をしているとき、プロペラ後流は常に航空機に影響を与えます。この時の操作は、右ラダーを優しく踏み、前脚を右に転じて、航空機を滑走路または誘導路のセンターラインに注意深く保つことです。航空機の滑走速度が速くなるほど、後方に流れる気流の速度が大きくなり、それに伴ってねじれた気流の影響を徐々に打ち消すため、プロペラ後流の効果は小さくなります。したがって、滑走速度の増加に伴い、適度にラダー量を減らし、航空機が滑走路のセンターラインの右側に逸脱するのを防ぐことができます。
プロペラ効果P-Factorは、プロペラ機が「高迎え角+低速+高出力」で飛行する際に発生する横滑り現象です。 航空機が離陸で機首を持ち上げたばかりのとき、着陸でフレア(浮揚)しているとき、あるいは低速飛行時には、十分な揚力を得るために、機首は一般に機体軸(または地面)に対して上向きの仰角を形成します。下図の右側の機首の図を参照してください。
 左右両側のプロペラブレードの風に対する迎え角が異なり、左側の迎え角は小さく発生する推力は相対的に小さくなります(上図の左側部分)。
右側の迎え角は大きく発生する推力は大きくなります(上図の中間部分)。その結果、機首が左に偏ります。
左右両側のプロペラブレードの風に対する迎え角が異なり、左側の迎え角は小さく発生する推力は相対的に小さくなります(上図の左側部分)。
右側の迎え角は大きく発生する推力は大きくなります(上図の中間部分)。その結果、機首が左に偏ります。
 プロペラ効果が機首の偏向にどのような影響を与えるかを記憶する方法については、本サイトの<a href=<a href="/blog/ja/2015/02/turn.html<a href=>“旋回の基本練習という記事を参照してください。
プロペラ効果が機首の偏向にどのような影響を与えるかを記憶する方法については、本サイトの<a href=<a href="/blog/ja/2015/02/turn.html<a href=>“旋回の基本練習という記事を参照してください。離陸過程におけるプロペラ後流とP-Factorへの主な対処方法は以下の通りです: 1。 スロットルをゆっくりと徐々に入れ、航空機を徐々に加速させます。 2。 加速に伴って機首が上に向かうので、スティックを押し、昇降舵を操作して機首を押さえます。 3。 外部を観察し、航空機が滑走路のセンターライン上にあるかどうかを確認します。もし偏向が発生したら、右ラダーを優しく踏んで方向を修正します。 4。 離陸後も引き続き外部の参照物を観察し、偏向が発生したら、右ラダーを優しく踏んで方向を修正します。
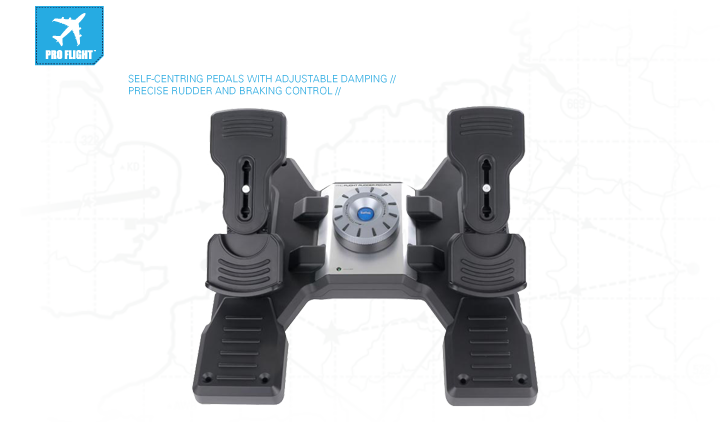
また、私のおすすめはリアリティを追求するために、ぜひラダーペダルを購入することです。これは非常に価値のあるアイテムです。 私が現在使っているのは、下のSaitekのPro Flight Rudder Pedalsです。 Saitek Pro Flight Rudder Pedals
ただ、下図のCH ProductsのPro Pedalsも非常に優れていると言われています。 CH Products Pro Pedals USB Flight Simulator Pedals ( 300-111 )<img src=http://www.chproducts.com/Pro-Pedals-v13-d-716.html?do=thumbnailer.get&src=images/chproducts/products/Simulation/PP.jpg&w=200&h=200&method=surface&quality=80>
それらの価格はどちらも100米ドル程度で、絶対にお釣りがくるほどの価値があります。
ラダーペダルを買った後は、設定を忘れずに行ってください。 <a href=”/%E3%82%B9%E3%82%AF%E3%83%AA%E3%83%BC%E3%83%B3%E3%82%B7%E3%83%A7%E3%83%83%E3%83%88%EF%BC%882012-09-29%207.47.35%EF%BC%891. onclick=“window.open(’/%E3%82%B9%E3%82%AF%E3%83%AA%E3%83%BC%E3%83%B3%E3%82%B7%E3%83%A7%E3%83%83%E3%83%88%EF%BC%882012-09-29%207.47.35%EF%BC%891.html’,‘popup’,‘width=1032,height=776,scrollbars=no,resizable=no,toolbar=no,directories=no,location=no,menubar=no,status=no,left=0,top=0’); return false”>
-thumb-640x481.png) 方向舵とラダーペダルの設定は一緒で、「yaw」の項目です。
そして左右のブレーキ、left toe brakeとright toe brakeの2つの項目、合計3つの項目で設定できます。
方向舵とラダーペダルの設定は一緒で、「yaw」の項目です。
そして左右のブレーキ、left toe brakeとright toe brakeの2つの項目、合計3つの項目で設定できます。 -
旅客機の操縦探検4.2:飛行速度の指標および、航空機の最大飛行速度はどれくらいですか?
巡航段階では、航空機に搭載されている自動操縦装置は非常に進化しており、パイロットが直接操縦を行わなくても飛行可能です。 しかし、それだからといってパイロットが手を組んで座っていられるわけではありません。常に各種計器をスキャンし、各種飛行データをチェックし、時には記録もするため、やはり忙しいものです。
以下では、飛行データに関する情報をいくつかの節に分けて簡単にまとめてみます。 まずは速度について見てみましょう。
最初にIAS 指示対気速度(Indicated Airspeed)です。この数字はPFDの左側にあるスピードバーの中央の四角い枠内に表示されます。 下図のボーイング777トレーニングマニュアルにあるように、AIRSPEED INDICATIONの矢印が指す箇所の数字がIASで、 現在の速度が142.5ノットであることを示しています。
指示対気速度は、ピトー管(またはピトット-static管、Pitot tube)と静圧孔を使って測定された、航空機が空気に対して相対的に移動する速度です。ピトー管の外形は下図をご覧ください。
 これは私が東京羽田空港の国際ターミナルで撮影した全日本空輸のボーイング777ですが、
機首の右側前に突き出した2つの針のようなプローブが見えるでしょう。それらがピトー管です。
安全を確保するため、一般的に航空機には信頼性を高めるために複数のピトー管が搭載されています。
例えばボーイング777には3つ装備されており、右側に2つ、左側に1つです。
これは私が東京羽田空港の国際ターミナルで撮影した全日本空輸のボーイング777ですが、
機首の右側前に突き出した2つの針のようなプローブが見えるでしょう。それらがピトー管です。
安全を確保するため、一般的に航空機には信頼性を高めるために複数のピトー管が搭載されています。
例えばボーイング777には3つ装備されており、右側に2つ、左側に1つです。ピトー管の原理は比較的単純です。下図のように、図の下方で「全圧」と書かれた箇所(つまり動圧)がピトー管前端の空気吸入口を表し、 「静圧」と書かれた場所は静圧孔を表し、機体側面の中央に位置しています。
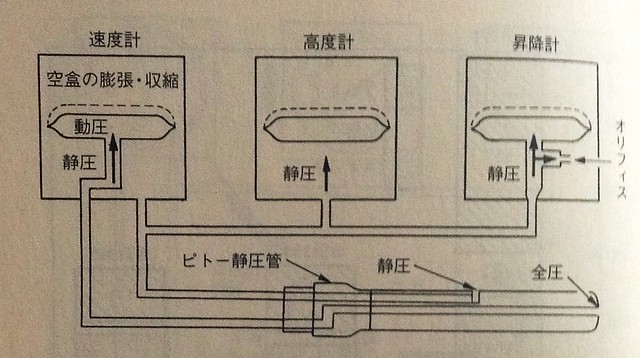 ピトー管が感知する真正面からのラム空気(ram air)の圧力と、側面の静圧孔が感知する静圧との差圧が、指示対気速度の入力となります。
航空機の速度が速いと動圧が大きくなり、それによって対気速度計内部の「アネロイド(空盒)」を押して膨張させ、逆に収縮させます。
ここでの「アネロイド」は2枚の非常に薄い金属板を溶接して作られており、外圧を受けると箱がわずかに変形します。
「アネロイド」の変位量がコンピュータに送られます。動圧は速度の2乗に比例するため、計算を行うことでシステムは指示対気速度を算出します。単位は海里/時間(ノット、knot)です。
ピトー管が感知する真正面からのラム空気(ram air)の圧力と、側面の静圧孔が感知する静圧との差圧が、指示対気速度の入力となります。
航空機の速度が速いと動圧が大きくなり、それによって対気速度計内部の「アネロイド(空盒)」を押して膨張させ、逆に収縮させます。
ここでの「アネロイド」は2枚の非常に薄い金属板を溶接して作られており、外圧を受けると箱がわずかに変形します。
「アネロイド」の変位量がコンピュータに送られます。動圧は速度の2乗に比例するため、計算を行うことでシステムは指示対気速度を算出します。単位は海里/時間(ノット、knot)です。動圧(指示対気速度計の表示数値)=1/2 * 空気密度 * 真速度^2
この公式から分かるように、同じ動圧、つまりIASの表示であっても、高度が異なれば飛行速度も異なります。この点については、後でTASを説明する際に実際の数字を使って詳しく解説します。指示対気速度IASは補正されていない生データであり、計器速度(Calibrated Airspeedの近似)とも呼ばれ、航空機が空気に対して相対的にどれくらいの速度で動いているかを示します。 IASは、航空機が地面に対して速く飛んでいるか遅く飛んでいるかを直接表すものではありませんが、非常に重要です。なぜなら、指示対気速度は航空機の空力性能の指標であり、 様々な機動操作や操舵面の操作(フラップを出すタイミング、最大飛行速度、失速速度など)を行う際の基準となるからです。 したがって、パイロットは飛行中、この指標を絶えず監視しなければなりません。
また、知っておくべき点として、動圧は空気密度に比例するため、飛行高度が高くなるほど空気密度は低くなります。 したがって、航空機が対地速度を900キロメートル/時間まで加速しても、IASはゆっくりと低下していく可能性があります。
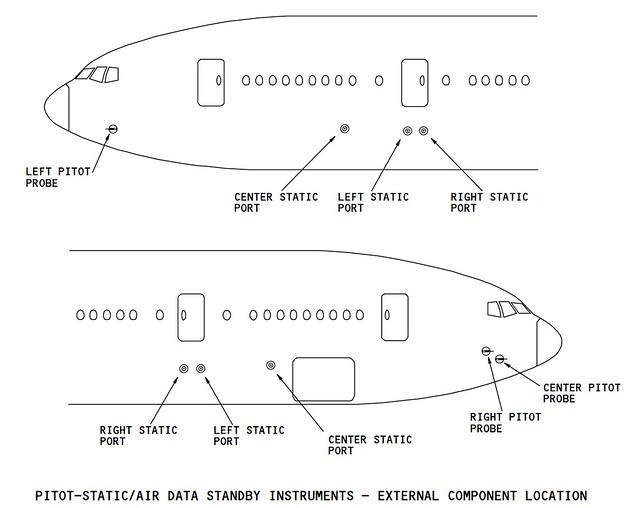
参考:下図はボーイング777のピトー管と静圧孔の位置を示した図です。
2つ目の速度に関する指標はTAS 真対気速度(TRUE AIRSPEED)、または真空速です。下図のND画面左上の「TAS 326」という表示がそれです。
-thumb-640x434.png)
上記のIAS指示対気速度は地表付近の空気密度を基準として計算されるため、航空機の現在の高度にある気圧を基準として計算された速度こそが、真の航空機の対気速度、すなわちTAS真対気速度です。TASによって初めて、航空機の実際の飛行速度の速さを知ることができます。これこそがTASがND(航法显示器)に表示される理由です。
IASとTASのデータを比較してみましょう。例えばIASが270ノットのとき、 地上:TASは当然270ノット。動圧は大気圧17(※数値は原文のまま)。 高度20,000フィート(約6,100メートル):空気密度は53%減少するため、同じ動圧を保つにはTASは362ノット、つまり時速670キロメートルが必要です。 高度30,000フィート(約9,100メートル):空気密度は37%減少するため、同じ動圧を保つにはTASは423ノット、つまり時速783キロメートルが必要です。 高度35,500フィート(約10,800メートル):TASは462ノット、つまり時速856キロメートルになります。
お分かりいただけたように、飛行高度が高くなるほど、エンジンの推力を増やす必要がなくても、航空機の実際の速度はどんどん速くなります。 航空会社や乗客にとって、旅程時間を節約し、できるだけ早く目的地に到着できることは望ましいことです。したがって、できるだけ高高度を飛行するというのは、誰にとっても喜ばしい選択と言えるでしょう。
3番目の速度指標はGS、つまり対地速度です。この指標の意味は最も分かりやすく、航空機が地面に対してどれくらいの速度で飛んでいるかを示します。
GS速度は風力と風向に関係します。向かい風(ヘッドウィンド)の条件では、TAS真対気速度から飛行方向に対する風速を引いたものがGS対地速度になります。逆に追い風(テールウィンド)の場合は、風速を足したものがGSになります。
したがって、上図のGS338は対地速度(GROUND SPEED)が338ノット/時間であることを示し、 TAS326は真対気速度(TRUE AIRSPEED)が326ノットであることを示しています。 その下の336度/11は、風向が336度、風速が15ノットであることを表しており(※原文ママ、画像等の文脈から推測に変更なし、ただし数値不一致は原文まま)、 さらにその下の矢印が風向を指し示しているため、この時航空機はほぼ真後ろからの追い風状態にあることがわかり、対地速度が対気速度よりも速くなっているのです。
-
軽量機における燃料混合比 Mixture Control の使い方について
地上の空気は高度が上がるにつれて薄くなるため、エンジンに吸入される空気量も減少します。 一方で、エンジンに送り込まれる燃料の量が変わらない場合、燃料混合気が濃くなりすぎ、燃料を無駄にするだけでなく、エンジンの出力も低下してしまいます。 そこで生まれたのがMixture Controlバルブです。これは空気と燃料の比率を制御し、パイロットがエンジンをより自在にコントロールできるようにします。 この魔法のような制御弁が、下図の赤い矢印が指す赤いバルブです(X-Plane 10のCessna 172SP)。

このバルブを前に押し込むと、エンジンに送られる燃料が増えます。これをRICH(リッチ)と呼びます。 一番奥まで押し込んだ状態は、通常、海面高度での飛行時に適切な量に設定されています。 バルブを後ろに引くと、燃料の供給量が減ります。これをLEAN(リーン)と呼びます。一番後ろまで引っ張ると燃料供給が完全に停止するため、エンジンも停止します。
また、エンジンに送り込まれる燃料混合気の量を制御するバルブは、上図の青い矢印が指すThrottle(スロットル)、いわゆるアクセルです。
以下、Mixture Controlの使い方について簡単に説明します。
一般的に2000~3000フィート以上になると、空気の薄さがエンジンに影響を与え始めるため、この高度に到達したらMixtureを少し後ろに引いて、 Lean(リーン)にすることで燃料流量を制限します。
しかし、より簡単な方法は、Mixture Controlをゆっくりと後ろに引いていきます。燃料供給が減ると、 エンジン回転計Tachometer(上図の黄色い円の箇所)のRPM指示値がゆっくりと上昇し始めます。 しかし、ある値を超えると、供給される燃料量が少なすぎる状態になり、回転計の針が下がり始めます。 したがって、RPM値が最大になる位置のMixture Controlの量が、最も効率の良い設定値となります。 ここで注意点ですが、通常はエンジンの過熱を防ぐために、RPM最大値の設定よりも少し多めに燃料を供給する、 つまり、少しRICH(リッチ)な状態に設定するのが一般的です。
エンジンが過熱すると、以下のようなOIL TEMP(油温)の警報メッセージが表示されます。

もちろん、飛行中は常に下のEGT Gauge(Exhaust Gas Temperature Gauge、排気温度計)をスキャンする必要があります。
 左側の針がEGT(排気温度)を示しています。もし高すぎる(針が上、目盛が下の位置)場合は、Mixture Controlを操作して燃料を増やし(Richにする)必要があります。
また、右側の針は燃料流量を示しており、航空機のパフォーマンスマニュアルを参照して、各高度における流量値を確認することができます。
左側の針がEGT(排気温度)を示しています。もし高すぎる(針が上、目盛が下の位置)場合は、Mixture Controlを操作して燃料を増やし(Richにする)必要があります。
また、右側の針は燃料流量を示しており、航空機のパフォーマンスマニュアルを参照して、各高度における流量値を確認することができます。もう一つ注意すべき点は、上空で調整したMixtureは、地上の低高度ではLean(リーン)状態になってしまうということです。 そのため、降下や着陸時にRich(リッチ)に戻すことを忘れないでください。特に、着陸時の復飛Go AroundやMissed Approachの際には重要です。
また、標高の高い空港から離陸する際は、空気が薄いため、事前にMixtureを調整(Leanにする)ことを忘れないでください。
以上
-
旅客機の操縦探秘4.1 ナビゲーションの基礎知識
巡航段階に入ると、パイロットは少しホッとして、離陸以来の緊張を解くことができます。 客室乗務員もコックピットにコーヒーなどの飲み物を提供してくれます。機内は乾燥しているので、パイロットも時々水分補給をする必要があるからです。
彼らが休憩している間に、私たちも少し立ち止まって、離陸からここまでの道のりを振り返ってみましょう。
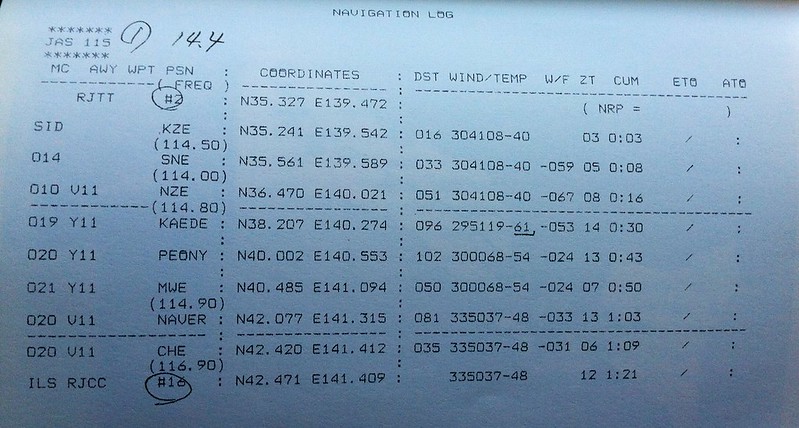
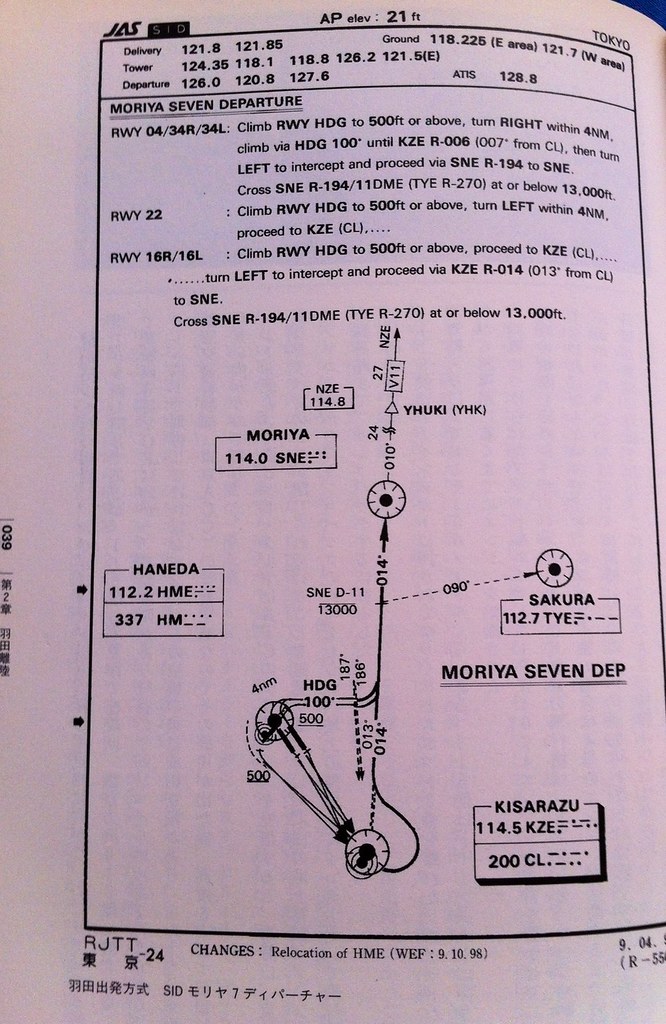
JAS115便を例に挙げて、まずは航路図とNAVIGATION LOG(ナビゲーションログ)を見てみましょう。
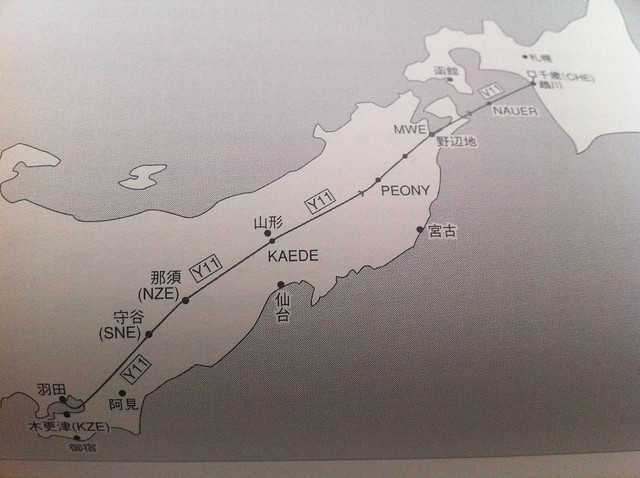
この機が選択したナビゲーション航路は、標準出発儀式進路(SID)、木更津KZE、守谷SNE、那須NZE、 山形KAEDEウェイポイント、PEONYウェイポイント、野辺地MWEウェイポイント、海上のNAUERウェイポイント、そして北海道の千歳CHEです。 機は基本的にY11航空路に沿って飛行し、離陸から守谷SNEまでの累計飛行距離は約50海里、 巡航段階まで上昇する那須NZEまでの累計飛行距離は約100海里(160キロメートル)、高度は40,000フィート(12,000メートル)に達し、所要時間は約16分です。以下の図の通りです。
ナビゲーションではVORやDMEなどの航空用語がよく使われますので、以下で簡単に説明します。
VOR(Very High Frequency Omni-directional Range:VHF全方向式無線標識)は、航空用の無線ナビゲーションシステムです。その動作周波数帯は108.00 MHzから117.95 MHzのVHF(超短波)帯であり、それゆえにこの名前で呼ばれます。 VORシステムは1949年に国際民間航空機関(ICAO)によって国際標準の無線航行設備として承認され、現在広く使用されている陸上ベースの近距離測角システムの一つです。 VOR送信機から送信される信号には2種類あります:一つは位相が固定された基準信号、もう一つはビーコン局を中心とした円周の角度に連続的に変化する位相を持つ信号です。つまり、各角度から発射される信号の位相はすべて異なります。 360度(磁北を指す)に発射される信号は基準信号と同相(位相差0)であり、180度(磁南を指す)に発射される信号は基準信号との位相差が180度です。 航空機に搭載されたVOR受信機は、受信した2つの信号の位相差に基づいて、自機がビーコン局のどの角度から発射された信号上にいるかを計算することができ、これにより航空機はVORを使用してVOR局に対する方位を知ることができます。
VORは通常、測距儀(DME:Distance Measurement Equipment)と同じ場所に設置されており、VOR-DME局と呼ばれます。 これにより、航空機に対して方向情報を提供すると同時に、ナビゲーション局までの距離情報も提供されるため、航空機の位置を一意に特定することができます。
以下は大阪国際空港内にあるVOR/DME局の写真です。コードサインはOWE、周波数は113.9MHzです。大阪空滑走路32Lの外側から私が撮影しました。

航路図上では、VORは目盛りの付いた円で表され、その横に四角い枠で名称、周波数、識別コードなどの情報が記載されています。 以下はSkyVectorウェブサイトのスクリーンショットで、中央にある大阪OSAKA OWEナビゲーション局の情報を見ることができます。
-thumb-640x587.png)
上の図の右上にあるOTSU局、コードサインCUE、周波数117.1MHzを見てみましょう。 この局を通っていくつかの航空路が交差していることがわかります。各航空路には081、087、108などの数字がありますが、 これらはVORラジアル(Radial)と呼ばれ、通常はR-081やR-087のように記されます。 R-081は、このラジアルがそのVOR局の磁北に対して81度の角度であることを示し、R-087は87度の角度であることを示します。
航空機はあらかじめ入力された航空路に沿って自動ナビゲーションで飛行しており、パイロットはND(航法表示器)で現在の位置や各ナビゲーション局、ウェイポイントの情報を確認でき、非常に一目瞭然です。 以下はボーイング777型機のマップモード時の表示例です。
-thumb-640x434.png)
図の中央下にある三角形のAIRPLANE SYMBOLは機自身のマークです。 ジグザグの実線のROUTE線はFMS(フライトマネジメントシステム)で設定された航路であり、航路上の星型マークはウェイポイントです。 破線のSELECTED TRACKは、オートパイロットパネル(MCP)で設定した針路を示しており、90度方向を指しています。
図の真上の四角い枠内のCURRENT TRACKの数字は、現在の機の針路が140度(磁北に対して)であることを示しています。 一方、横のTRKとマークされた三角形のCURRENT HEADINGは機首方向を示しており、135度になっています。 この2つのデータは、機の進行方向が機首の向いている方向と等しくないことを示しています。これは風の影響を受けているためです。 フライトマネジメントシステムコンピュータ(FMS)は、機の進行方向が真っ直ぐ進むように、機首を風上に少し向けるよう指示しています。この2つの角度の差は、3.5節で述べた風修正角(WCA:Wind Correction Angle)です。
画面の右上には次のウェイポイントへの情報が表示されています。図のように、現在アクティブな次のウェイポイントはGRHで、 8時38分に到着予定、現在の機からそこまでの距離は32.5海里です。
-
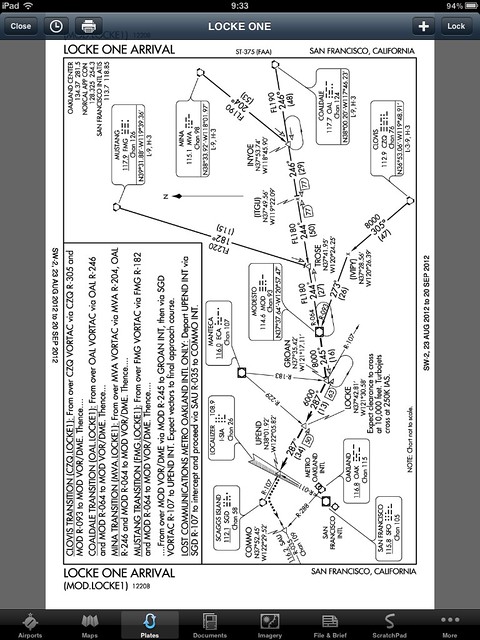
チャートを読む楽しみ
以前、実在の航空会社の航路を使ってX-Planeで飛行する方法を紹介する英文記事を読んで、非常に役に立つと思いました。そこで、インターネットから実際の航図をダウンロードして印刷し、記事の説明に従って飛行ルートを詳しく調べ、紙に描いてみたところ、航路への理解がかなり深まりました。
上記の記事で紹介されているルートと図表資料は以下の通りです: 1 シンシナティ空港Jodub2標準計器出発方式 Cincinnati/Northern Kentucky International Jodub Two Departure 2 高空航路図 High Altitude Enroute Chart US (HI) #4
Flight Planning at SkyVector.com3 ニューヨークMilton3標準到着経路 New York, NY Milton Three Arrival 4 ニューヨーク・ラガーディア空港ILS滑走路4 New York, NY La Guardia ILS Rwy 4以下に大まかな概要をまとめますので、皆様のご批評・ご指導をお願いします。
まずは出発図(SID)です。
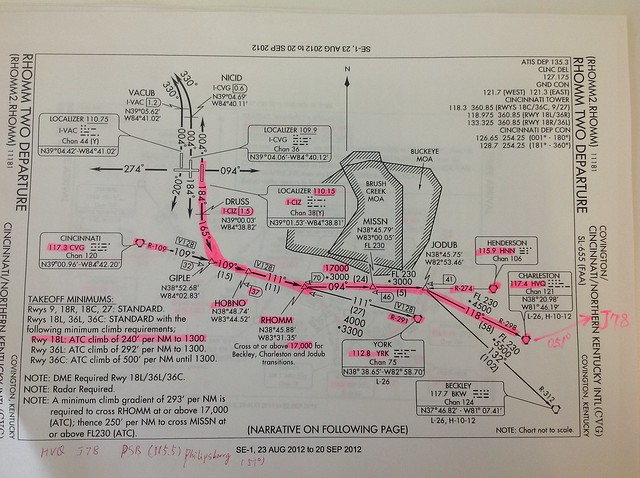 18L滑走路から離陸した後、滑走路針路184度に沿ってDRUSS定位点まで飛行します。これは空港のI-CIZ DME(周波数110.15)から1.5海里の地点です。
そこで左に旋回して165度とし、GIPLE定位点に到達したら左旋回します。ここでの方位はCVGNavigational Aid(周波数117.3)の109度ラジアルを基準とします。
HOBNO定位点に到達した後、YRK Navigational Aid(周波数112.8)の291度ラジアルの方向へ転針し、
RHOMM定位点を通過した後、左旋回してHNN Navigational Aid(周波数115.9)の274度ラジアルの方向へ向かいます。
18L滑走路から離陸した後、滑走路針路184度に沿ってDRUSS定位点まで飛行します。これは空港のI-CIZ DME(周波数110.15)から1.5海里の地点です。
そこで左に旋回して165度とし、GIPLE定位点に到達したら左旋回します。ここでの方位はCVGNavigational Aid(周波数117.3)の109度ラジアルを基準とします。
HOBNO定位点に到達した後、YRK Navigational Aid(周波数112.8)の291度ラジアルの方向へ転針し、
RHOMM定位点を通過した後、左旋回してHNN Navigational Aid(周波数115.9)の274度ラジアルの方向へ向かいます。RHOMM定位点には高度制限があり、17000フィート以上が要求されます。 JODUB定位点に到達した後、右に旋回し、Navigational Aid HVQ(周波数117.4)の298度ラジアル方位で飛行します。
その後、HVQから進入手順の入口であるPSB Navigational Aidまでの区間は非常にシンプルで、航路J78に沿って、51度の針路で北東方向へ直線飛行するだけです。
最後に到着図(STAR/Approach)です。
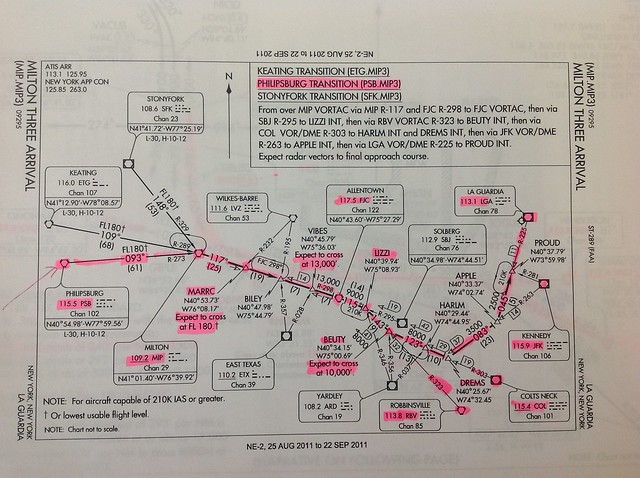 PSB Navigational Aidを通過後、右に旋回してMIP Navigational Aid(周波数109.2)の273度ラジアルの方向へ向かい、
MIPに到達したら右旋回してETG Navigational Aid(周波数116.0)の117度ラジアルの方向へ向かい、MARRC定位点まで飛行します。
MARRC定位点では高度FL180(18000フィート)が要求されるため、通常、MARRCに到達する前に機体は降下を開始している必要があります。
PSB Navigational Aidを通過後、右に旋回してMIP Navigational Aid(周波数109.2)の273度ラジアルの方向へ向かい、
MIPに到達したら右旋回してETG Navigational Aid(周波数116.0)の117度ラジアルの方向へ向かい、MARRC定位点まで飛行します。
MARRC定位点では高度FL180(18000フィート)が要求されるため、通常、MARRCに到達する前に機体は降下を開始している必要があります。 -
上昇、降下、水平飛行の練習
また出張で一週間ほど留守にしていたが、ブログを放置するわけにはいかないという精神で、簡単に更新しよう。
昨日帰宅してから、X-Planeで遊びながら息抜きをし、特に上昇と降下時の昇降計の数値に焦点を当てて練習した。 例えば、昇降計の針を毎分1000フィートに保ち、姿勢を変える際には操縦桿を押したり引いたりする操作を丁寧に行うという2点だ。
上昇や降下をする際は、まずピッチ姿勢を整え、その後でエンジンの推力を増減する。 垂直方向の速度が毎分1000フィート前後で徐々に安定したら、トリムを使って微調整するだけでいい。 操縦桿をほとんど操作しなくても、機体がその速度をキープして安定してくれているのを見ると、とても達成感があるよ。
水平飛行への復元操作も基本的には同じで、順番通りに操縦桿を操作してピッチ角を調整し、 その後推力を調整する。垂直方向の速度が毎分0フィートで徐々に安定したら、少しトリムを調整すればよい。
言葉にするのは簡単だが、実際の操作で機体の姿勢を安定させるのはそう簡単なことではない。 しばらく練習しないと手が慣れてなくなるので、やはり常々復習が必要だ。
以上
-
旅客機操縦の探秘3.8 巡航での水平飛行へ
この時、航空機は東京北関東レーダーセンターの管轄を離れ、東北セクターへと入っていく。ボーイング777-200によるエア・システム115便を例に見てみよう。
離陸離陸後から16分が経過し、機体は栃木県の那須地方、NZE VOR上空に差し掛かった。
高度は39,000フィートに到達している。上図を見るとわかるように、機体は守谷SNEウェイポイントからR-NAV(エリア・ナビゲーション)のY11航空路へと入り、 この航空路に沿って一路北上し、北海道の千歳ウェイポイントまで続く。
この時、パイロットはATCから新しい連絡を受け、セクター間の引き継ぎ(ハンドオフ)が行われる: “Air System 115,Contact Tokyo 118.9”
これは、 “Air System 115便、東京东北区域(東北セクター)へ連絡せよ。周波数は118.9” という意味だ。
パイロットは復唱して、 “Tokyo Control 118.9,Air System 115”
これは、 “了解、東京区域118.9へ連絡します。Air System 115便” という意味。
それからパイロットは無線周波数を東北セクターの118.900MHzに切り替え、次のように呼び出す。 “Tokyo Control,Air System 115,Leaving 396 Climb 410”
これは、 “東京区域、こちらAir System 115。39,600フィートを通過中、41,000フィートへ上昇中” という意味だ。
東北セクターの管制官は機材の信号を確認し、 “Air System 115,Tokyo Control,Roger”
これは、 “Air System 115、こちら東京区域、了解” と応答する。
機体の高度は徐々に巡航高度に近づく。選択した高度からあと900フィート(ボーイング737の場合)に差し掛かると、 コックピットの高度警告システムから「ドン」という注意音が鳴り、琥珀色の高度警告灯「Altitude Alert」が点灯する。 パイロットに、もうすぐ巡航高度であることを知らせるのだ。 高度が選択高度からあと300フィートになると、警告灯は自動的に消灯する。
同様の高度警告は、水平飛行中に選択高度から300フィート以上ずれた場合にも作動する。
巡航高度に近づくと、飛行管理システム(FMS)は自動的にピッチ角を下げて調整を始める。 スロットル付近にある水平尾翼トリム(STAB TRIM)のコントロールホイールが再び自動的に前に回り、機体は徐々に水平飛行の姿勢に入っていく。
 PFD(プライマリ・フライト・ディスプレイ)を見ると、右側の垂直速度バーが中央の0に近づき、左側のスピードバーの速度値は大きくなっているのがわかる。
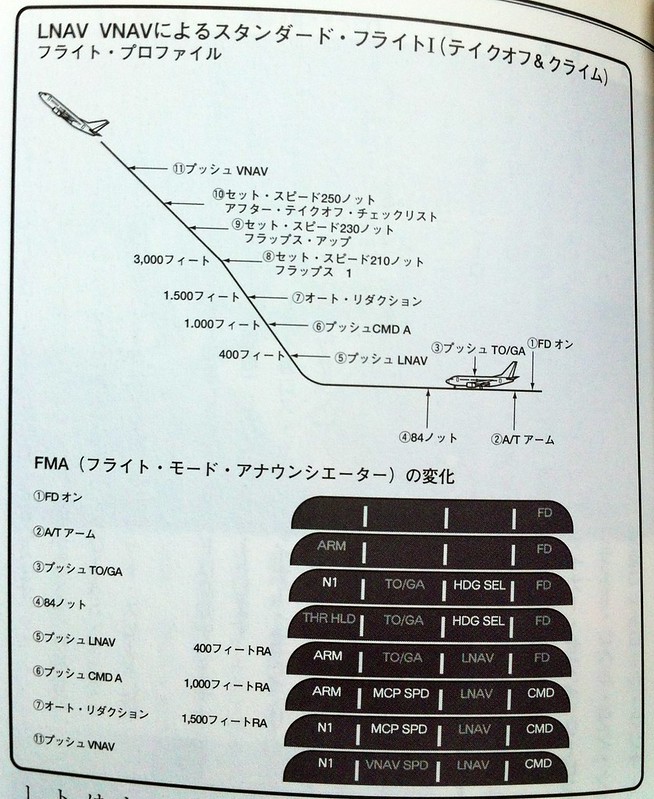
PFD(プライマリ・フライト・ディスプレイ)を見ると、右側の垂直速度バーが中央の0に近づき、左側のスピードバーの速度値は大きくなっているのがわかる。選択高度からあと100フィート(ボーイング737の場合)になると、 PFD左上のFMA(飛行モード信号栏)にあるピッチモード表示が、「VNAV SPD」から緑色の「ALT ACQ」モードへと変わる。 下図のフェーズ16の部分がそれだ。
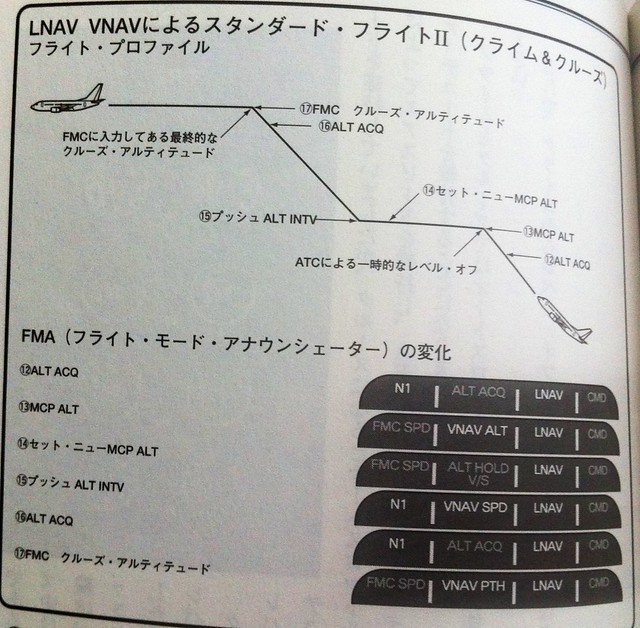
巡航高度に到達すると、機体は水平飛行に入り、FMAのスラストモード表示も変化する。N1モードから「FMC SPD」モードへ、 ピッチモードもALT ACQから「VNAV PTH」モードへと変わる。上図のフェーズ17の通りだ。
-
アドオン紹介:着陸接地速度の表示と評価 X-Plane Landing Speed Plugin
本物の飛行であれフライトシミュレーターであれ、着陸は基本的に最も難しい操作です。 着陸時の垂直速度を表示し、着陸操作に対して評価を下してくれる素晴らしいアドオンを見つけました。 練習に非常に役立ちますので、以下で紹介します。
まず導入方法ですが、<a href=“http://forums.x-plane.org/index.php?app=downloads&showfile=7995"ここから旧バージョン、または<a href=“http://forums.x-plane.org/index.php?app=downloads&showfile=18702"ここから64ビット対応の新バージョンをダウンロードし、 ファイルを X-Plane のメインディレクトリにある Resources/plugins ディレクトリに展開します。
次に X-Plane を起動し、plugins メニューを開いて Landing Speed プラグインを有効化します。 これ以降、着陸を完了するたびに、自動的にウィンドウがポップアップし、評価点と着陸時の垂直速度が表示されます。
 上の画像の結果は “good landing” で、垂直速度は 124 fpm (フィート/分)、0.628 m/s でした。
何回か飛ばしてみましたが、毎回 Good でした。
上の画像の結果は “good landing” で、垂直速度は 124 fpm (フィート/分)、0.628 m/s でした。
何回か飛ばしてみましたが、毎回 Good でした。評価は以下のカテゴリーに分かれています。さあ、あなたはどんな評価が得られるか試してみてください? R.I.P. = rest in peace。安らかに眠ってください Anybody Survived? =生存者はいますか? You are fired = クビです Acceptable = 許容範囲内 hard landing = ハードランディング good landing = グッド Excellent landing =エクセレント
さらに、このプラグインは X-Plane のメインディレクトリに landing.log ログファイルを自動生成します。内容は以下の通りです: Sun Sep 2 23:32:17 2012 N172SP RJTA ‘ATSUGI NAF’ 0.745 m/s 147 fpm good landing Sun Sep 2 23:37:13 2012 N172SP RJTA ‘ATSUGI NAF’ 0.515 m/s 101 fpm good landing Sun Sep 2 23:43:09 2012 N172SP RJTA ‘ATSUGI NAF’ 0.628 m/s 124 fpm good landing 後でいつでも確認できるので、とても便利です。
-
旅客機の操縦探検 3.7 ATCハンドオフ センターへの移行、上昇継続
まず、再び東京の羽田空港から北海道の新千歳空港へ向かうAirSystem115便を例に、出発から到着までの航空交通管制の流れを見てみましょう。
管制区の移行
-
羽田空港:
放行管制 → 地上管制 → 塔台管制 → 出発管制 -
区域管制:
東京区域管制区 → 札幌区域管制区 -
新千歳空港:
アプローチ管制 → 塔台管制 → 地上管制
飛行機は空港管制と区域管制の間で次々と異なる部署に引き継がれていきます。これはリレーのように飛行安全を保証する仕組みです。以下の2つの図をご覧ください。
左は出発空港内での管制:放行、地上、塔台、出発管制
右は到着空港内での管制:アプローチ、塔台、地上管制
日本の区域管制区
日本の区域管制区は以下のように細分化されており、それぞれがさらに小さな管制セクターに分かれています。
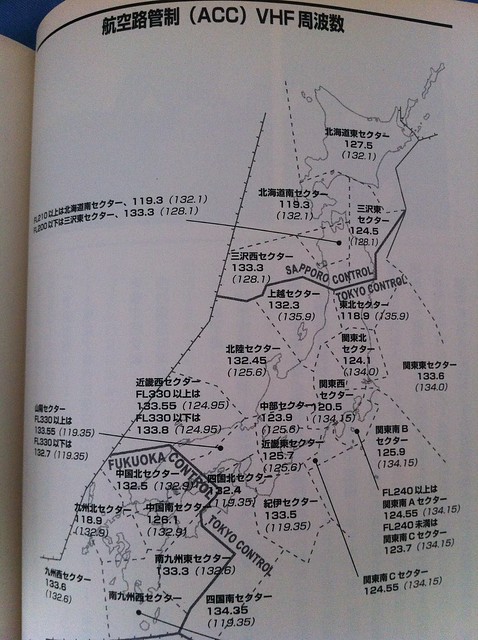
今回のフライトでは以下の5つのセクターを通過します:
- 東京管制区:関東西区、関東北区、東北区
- 札幌管制区:三沢東区、北海道東区
これらのセクターをリレー方式で通過し、最終的に札幌空港の管制区へ到達します。
管制との通信例
AirSystem115便は守谷ウェイポイント(Moriya)方向へ上昇中で、羽田空港の出発管制からパイロットへ指示が出ます。
管制官:“Air System 115, Contact Tokyo Control 124.1, Good day”
(エアシステム115、東京区域管制124.1へコンタクトせよ。グッデイ)副操縦士:“Tokyo 124.1, Air System 115, Good day”
(東京124.1、エアシステム115、グッデイ)その後、無線周波数を124.100MHzに切り替え、以下のように通信します。
副操縦士:“Tokyo Control,Air System 115,Leaving 7800 for FL210,Initially Proposed FL410”
(東京区域、エアシステム115。7800フィート通過中、21000フィートへ。最終目標高度41000フィート)管制官:“Air System 115, Tokyo Control, Roger, Cancel Restriction 上昇 and Maintain FL410”
(エアシステム115、東京空域。了解。上昇制限を解除し、41000フィートを維持せよ) -
-
旅客機操縦の探秘3.6 ATCハンドオフによりデパーチャ管制へ移行、VNAVモードへ突入
AirSystem115便を例に挙げます。航空機は羽田空港のMoriya 7番出発手順に従い、まず滑走路(16R)の方向へ飛行し、図の右下にあるKZE(KISARAZU木更津)ウェイポイントに到達した後、自動的に左に30度のバンクを入れ、14度の方角(ほぼ真北向き)で旋回してSNE(MORIYA守谷)ウェイポイントへ向かいます。
この時、塔の管制官は航空機の離陸が正常であることを確認した後、パイロットに対し出発管制への移行を指示します: “Air System 115,Contact Departure” これは “Air System 115、東京デパーチャー(離場管制)と交信せよ” という意味です。 副操縦士はこれを復唱し “Departure,Air System 115” すなわち “東京デパーチャーと交信します、Air System 115” と言った後、無線周波数を出発管制の120.800MHzに合わせ、次のように呼びかけます: “Tokyo Departure,Air System 115,Leaving 1800” これは “東京デパーチャー、Air System 115です、1800フィートを通過中” という意味です。 管制官は次のように答えます: “Air System 115,Tokyo Departure,Rader Contact,Turn Left Heading 020, Vector to Moriya, Climb and Maintain 210” これは以下の意味です: “Air System 115、東京デパーチャーです、レーダー捕捉。左旋回で針路020へ。Moriyaへのレーダー誘導。21,000フィートまで上昇し維持せよ” 副操縦士は復唱します: “Left 020,Direct 210,Air System 115” つまり “左旋回 針路020、21,000フィート維持、Air System 115"です。
上記の標準出発手順(SID)によると、MORIYAの前方11海里地点には高度制限があり、 13,000フィート(約3300メートル)以下を飛行しなければなりません。 しかし、ここで離場管制官はパイロットに対し、KZEウェイポイントを経由せずに直接旋回してMORIYAへ向かい、21,000フィートまで直ちに上昇することを許可しました。これはおそらく今日の交通量が少なかったからでしょう。 航空会社にとって、これは時間の節約にも燃料の節約にもなり、非常に好ましいことです。 そのため、パイロットはMCPのコースセレクトダイヤルを020に回しました。
現在、航空機の速度はMCP SPDモードになっているため、パイロットは速度設定を段階的に上げて、出しているフラップを徐々に格納する必要があります。 例えば、先ほどの737-500の場合、離陸時のフラップ設定は5度なので、パイロットはまず1度(Flap 1)まで格納することができます。 Flap 1の速度条件はV2+15ノット以上ですが、現在の上昇速度はすでにV2+20ノットに達しているので、1度まで格納しても問題ありません。 同時に、離陸後の手順も実行され始めます。オートブレーキのスイッチがRTOからOFFに切り替わります。
 ランディングギアのレバーもUP/OFF/ONの並びにおいて中間のOFF位置に移動し、エンジンスタートスイッチもCONTからOFFに設定されます。
速度はさらに上昇し続けているため、この段階でフラップを完全に格納しても問題ありません。737-500のフラップアップ時のマニューバー速度は210ノットです。約190ノットになった時点で機長は副操縦士にFlap UPを指示し、これにより前後縁のフラップが翼の中に完全に格納され、航空機は抗力が最も小さい状態になります。
ランディングギアのレバーもUP/OFF/ONの並びにおいて中間のOFF位置に移動し、エンジンスタートスイッチもCONTからOFFに設定されます。
速度はさらに上昇し続けているため、この段階でフラップを完全に格納しても問題ありません。737-500のフラップアップ時のマニューバー速度は210ノットです。約190ノットになった時点で機長は副操縦士にFlap UPを指示し、これにより前後縁のフラップが翼の中に完全に格納され、航空機は抗力が最も小さい状態になります。 -
旅客機の操縦を探る 3.5 オートパイロットの作動
機体は上昇を続け、無線高度計の数値が400フィート(旅客機操縦マニュアルの737-500を例にします)を超えました。 ここで水平ナビゲーション LNAVモードを入力できます。機長は副操縦士にMCPのLNAVボタンを押すよう指示します。

すると、PFDの左上のモード欄で、針路設定がHDG SELからLNAVに変わり、飛行モードは下図の第5段階に入ります。
LNAVはLateral Navigationの略称で、水平ナビゲーションを意味し、機体が事前に設定された航空路に沿って水平面上で自動飛行することを制御できます。 LNAVの原理は、まず慣性航法装置IRS(機上のレーザージャイロを用い、ドップラー効果から機体の加速度を得る)を利用し、 時間積分によって現在の速度と位置を算出します。その後、地上の無線ナビゲーション施設(VOR、DME、ILS/DME、VORTAC、TACANなど)またはGPSから得られる位置データと組み合わせ、 フライトマネジメントコンピュータFMCがこれらすべてのデータを統合します。つまり、FMCはIRSの誤差を各ナビゲーション施設のデータで絶えず修正し、機体が正しい航空路を飛行するよう制御します。
MCPでLNAVキーが押されると、PFD上のフライトディレクターFDはFMCの指示に従い、事前に設定された航空路に基づいてパイロットをナビゲートします。 パイロットはFDに従って機体を操縦すれば、横風があっても航空路から逸脱することはありません。 这是因为FMC会根据天气计算出风向修正角WCA(Wind Correction Angle),WCA也会被集成到飞行指令条FD上,所以飞行员驾驶时只要专注于FD就可以了。
与此同时,油门控制模式也发生了变化,绿色的THR HLD变为了白色的ARM, 也就是说飞机升到400英尺,并且离地18秒以后,发动机自动推力锁定模式就被解除, 发动机推力进入随着爬升高度而自动减少的状态。
飞机高度超过事先决定好的机场对地高度(比如1000英尺)以后,飞行员就可以打开自动驾驶模式A/P。 737上有两台自动驾驶仪,左边的为A,右边的为B,一般来说机长会指示副驾驶使用左侧,按下MCP中右侧的A/P ENGAGE 部分的CMD A键,
 于是飞行员的手就可以脱离操纵杆或操纵盘,飞机的各个舵面的控制就都交给计算机处理了。
于是飞行员的手就可以脱离操纵杆或操纵盘,飞机的各个舵面的控制就都交给计算机处理了。这样PFD上的左上方模式栏里自动驾驶设定由FD变为绿色的CMD,同时俯仰控制部分的模式也从TO/GA 变为MCP SPD,飞行模式进入下图中的第6阶段。
MCP SPD意味着现在飞机的速度将由MCP上中央处的IAS/MACH旋钮来控制,
而飞行员将会根据飞行中不同阶段不断调整这个速度。自动驾驶模式中,飞机忠实按照CDU中输入的航路,不断转弯向下一个航路点飞去。
超过气压高度1500英尺以后,推力模式自动从减推力起飞设定转变为爬升减推力, 飞机发动机的声音也比起刚才安静了一些。 PFD上的左上方模式栏里自动推力模式从白色的ARM变为绿色的N1模式,飞行模式进入下图中的第7阶段。
<a href=Prev: 收轮GEAR UP
TOC: 目录 <a href=Next: ATC移交离场管制,进入VNAV模式完
-
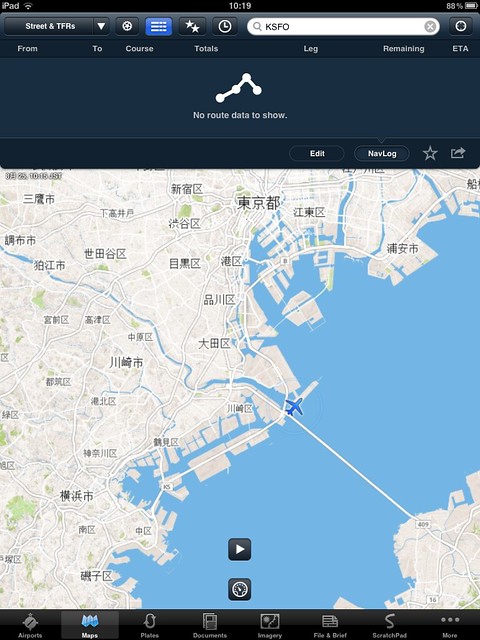
X-Plane 10.10 Beta 9の新機能 -- 空港マップナビゲーション iPadアプリForeFlight Mobileサポート
X-Plane 10.10Beta9がリリースされ、多くのバグ修正が行われたようです。 しかし、このバージョンの最大の目玉は、iPad/iPhone空港地図ナビゲーションアプリ ForeFlight Mobile に対応したことです。 これにより、VFR航路図、レーダー、フライトプラン、空港地図などの情報を表示できるようになります。
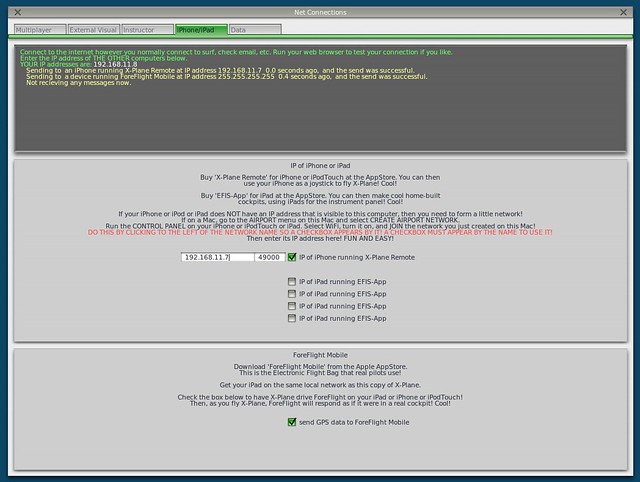
簡単に使用方法を紹介します。まず、X-PlaneとForeFlightのインストールをiPad/iPhoneに行い、 X-Planeを起動した後、SettingsメニューのInternetオプションを開き、iPhone/iPodタグを選択して、画面の一番下にある ForeFlight Net Connections 項目をチェックします。下図の通りです。
続いて ForeFlight Mobile アプリケーションを起動したら、まず右下のMoreボタンを選択し、Devices項目を選択します。 ここにX-Planeのロゴが表示されるはずなので、それを選択します。下図の通り
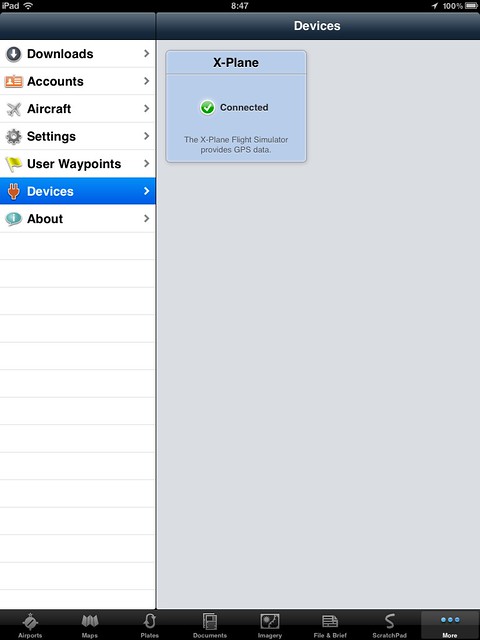
そしてそのデバイスを有効化します。下図の通り
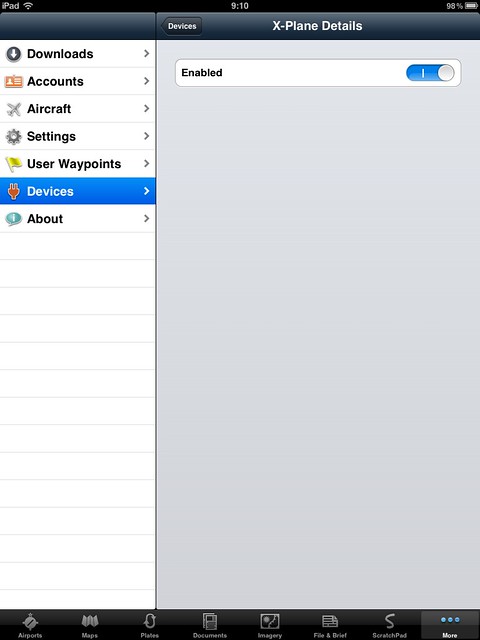
これで基本設定は完了です。
X-Planeで機体をゴールデンゲートブリッジ付近まで飛ばし、ForeFlight Mobileの地図でVFR航図を表示してみると、確かに接続されています。
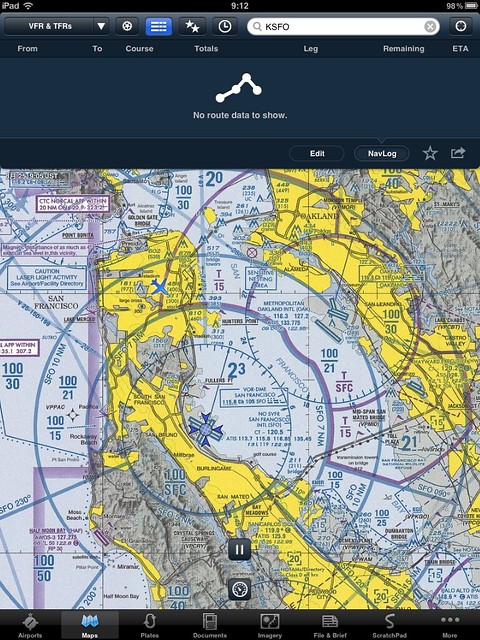
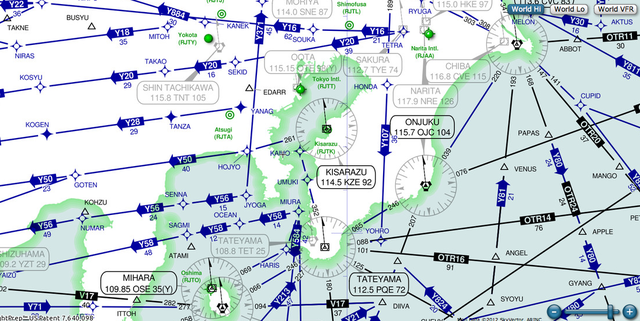
機体の移動に伴い、ForeFlight Mobile上の機体アイコンも地図上でリアルタイムに移動しています。 次にIFR航図に変えてみましょう。
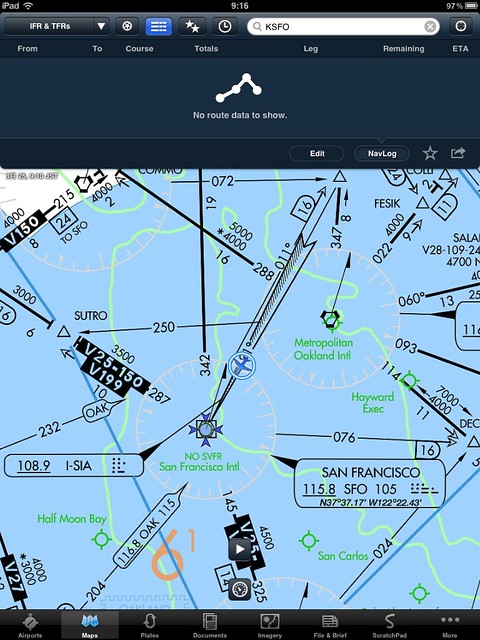
わあ、これなら航空路に沿って飛ぶだけだから、便利すぎるだろ。
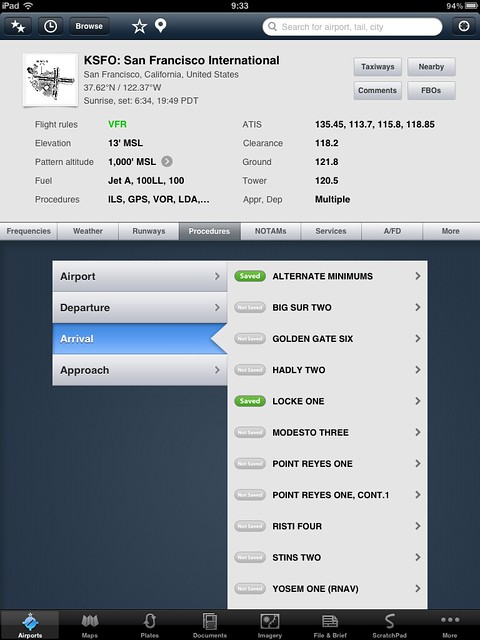
空港情報を調べてみると、各種通信周波数、天候、標準進入出発手順など、必要なものがすべて揃っています。
iPadを見ながら、あっさりとサンフランシスコ空港の19L滑走路に着陸し、地上走行で19Rを横切ると、なんと自動的に音声案内が表示されました。恐るべし。下図の通り、

なお、航図についてはアメリカとカナダのみ対応で、他の地域では世界地図を見ることしかできません。 とはいえ、かなり便利です。
とにかく、ForeFlight Mobile アプリケーションは今日からX-Plane遊びに必須の「神器」になりました。強くおすすめします。
完
-
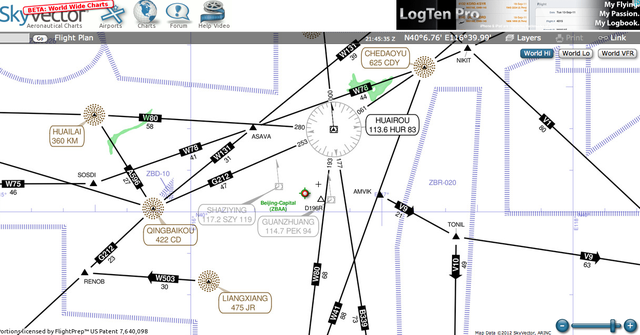
無料の航空図ウェブサイトSkyVector
本日、航空図ウェブサイト SkyVector が<a href=“http://skyvector.com/"全世界の航空図サービスを開始しました。しかも無料です。なんと良心的なんでしょう。
<a href=
-thumb-640x507.png)
このサービスは Google マップのようなインターフェースを採用しており、拡大・縮小・移動の操作が滑らかです。 高解像度と低解像度の2種類の IFR および VFR 航空図、ならびに各空港の気象情報が提供されています。 また、シンプルなフライトプラン機能も備えています。各ウェイポイントと速度を入力すれば、飛行距離と時間を自動的に計算できます。機能はそれほど強力ではありませんが、参考としては quite convenient です。 <a href=
-thumb-640x502.png)
下の高高度 IFR エアウェイ図を見てみましょう。空中の航空路が一目瞭然です。 これから出かけて飛行機に乗る前に、大体の飛行ルートをチェックしておけば、機体が通過する地域について心中で把握できます。
<a href=“https://yinlei.org/x-plane10/2012/11/22/%E3%83%94%E3%82%AF%E3%83%81%E3%83%A3%207.png"
<a href=“https://yinlei.org/x-plane10/2012/11/22/%E3%83%94%E3%82%AF%E3%83%81%E3%83%A3%208.png"



{kind=link}
{kind=link}