フライトシミュレーター愛好家のノート
-
旅客機操縦探秘6.5 着陸手順
パイロットが実行する着陸手順は、実のところ第6.3節で紹介したILSの設定から始まっています。 本節では、その他の操作をまとめます。
まず、パイロットは客室乗務員に着陸の準備をするよう通知し、乗客にテーブルを格納し、シートベルトを着用し、座席の背もたれを起こし、着陸前のすべての安全準備を整えるよう求めます。 次に、機長はフラップ設定計画表に基づいてフラップ設定を指示し、副操縦士はその指示に従ってフラップ・レバーを操作し、フラップとスラットが正しく伸出したかどうかを監視します。
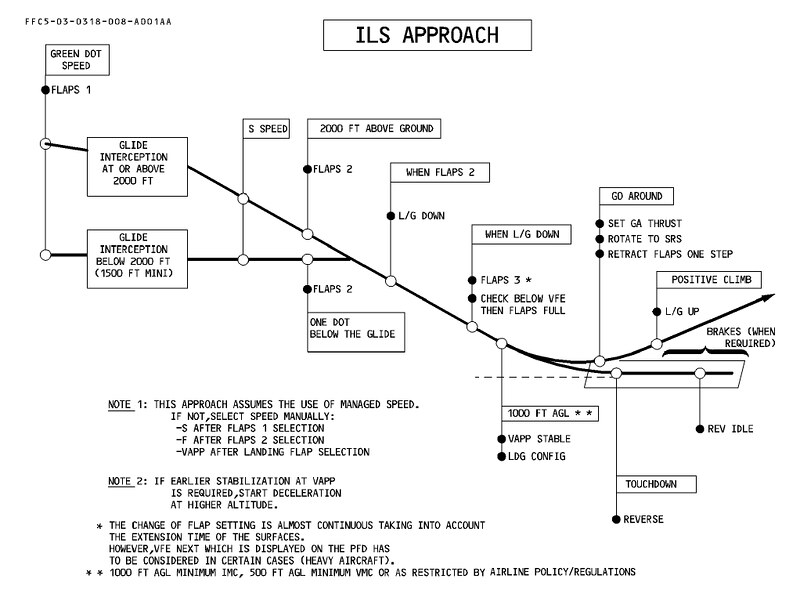
フラップの伸出計画については、下のエアバスA340のフライト・マニュアルにある資料を参照してください。 グライドスロープ・キャプチャ前には設定1に、グライドスロープ・キャプチャ後の高度2000フィートへの降下時に設定2に、 その後は着陸装置(ランディングギア)を下ろし、フラップは設定3に、そして速度がVref基準速度を下回ったら設定FULLにされます。
以下の2枚の写真から、グライドスロープ・キャプチャ前後のフラップの位置を見ることができます。 これは、私がエアバスA320に乗って東京国際空港(羽田)へ向かう際に撮影したものです。 当時のアプローチ滑走路はILS Zulu 34Lで、グライドスロープ・キャプチャ前のフラップ位置は15度、このとき航空機は千葉県の上空にいました。

滑走路の方向を合わせてグライドスロープ・キャプチャ後、フラップ位置は20度まで下ろされます。このとき、航空機は東京湾の上空を飛行しています。

第2.6節で紹介したフラップの設定ノッチは、エアバス社とボーイング社で定義が異なります。例えばエアバスA330には5つのノッチ(0、1、2、3、FULL)がありますが、ボーイング777には6つのノッチ(1度、5度、15度、20度、25度、30度)があります。
ここからは、ボーイング737-500を例に、着陸手順をまとめます。 グライドスロープ・キャプチャ前に、フラップをノッチ5まで下ろし、次に着陸装置のレバーを下ろします。緑色の着陸装置表示灯が点灯したら、 フラップ・レバーを15に置き、同時にエンジン始動スイッチ(Start Switches)を連続CONT位置に設定します。 次に、システム・アニュンシエーター(System annunciator)のリコール(Recall)と再確認を行い、 スポイラー・レバー(Speedbrake Lever)をアーム(ARM)位置に設定し、スポイラー・予備表示灯SPEED BRAKE ARMEDが点灯していることを確認します。 グライドスロープ・キャプチャ後は、引き続きフラップ計画表に従って必要なノッチを設定し、MCPに復飛高度を設定します。 続いて機長が着陸前チェックリストの指示を開始し、副操縦士は以下の着陸前チェックリストを実行します:

以下では、着陸手順で必要な各コントローラーと計器の操作について具体的に見ていきましょう。
フラップ・レバー(Flap Lever)

737のフラップ・レバー(Flap Lever)のノッチ側面図。
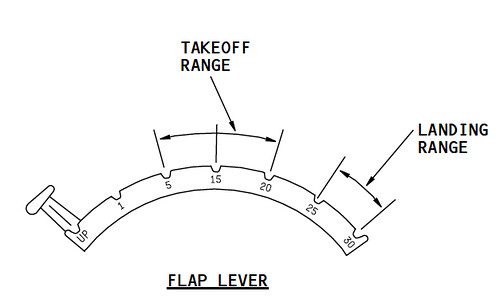 それぞれのノッチには溝があることがわかります。フラップを設定する際、パイロットは指でレバーの頭部をつかみ、
引き上げてから、設定したいノッチへレバーを移動させ、手を放すとレバーがそのノッチにカチッと収まります。
それぞれのノッチには溝があることがわかります。フラップを設定する際、パイロットは指でレバーの頭部をつかみ、
引き上げてから、設定したいノッチへレバーを移動させ、手を放すとレバーがそのノッチにカチッと収まります。システム・アニュンシエーター(System annunciator)は、下図の黒枠内の部分で、ボタンとしても機能し表示灯でもあります。
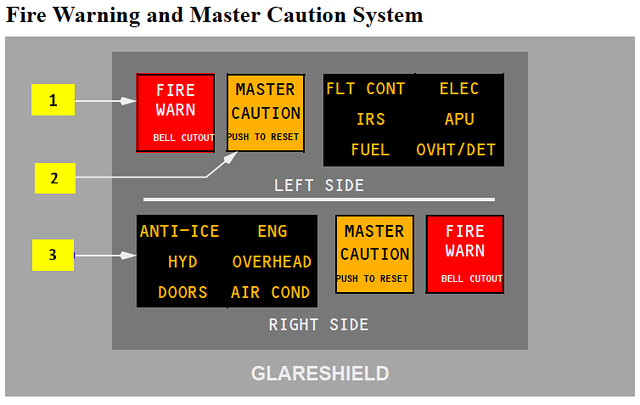 機上のサブシステムに故障が発生すると、アニュンシエーターの関連するシステムの小さなランプが点灯し、パイロットに警報を提供します。
リコール操作を行う際、スイッチを押すと、アニュンシエーターのすべての小さなランプと、横にあるマスター・コーションMASTER CAUTIONランプがすべて点灯し、
マスター・警報システムと各個別故障システムが正常に動作していることを示します。
機上のサブシステムに故障が発生すると、アニュンシエーターの関連するシステムの小さなランプが点灯し、パイロットに警報を提供します。
リコール操作を行う際、スイッチを押すと、アニュンシエーターのすべての小さなランプと、横にあるマスター・コーションMASTER CAUTIONランプがすべて点灯し、
マスター・警報システムと各個別故障システムが正常に動作していることを示します。スポイラー・レバー(Speedbrake Lever)は、スロットル・レバーの左側にあり、左側に突き出ているレバーです。
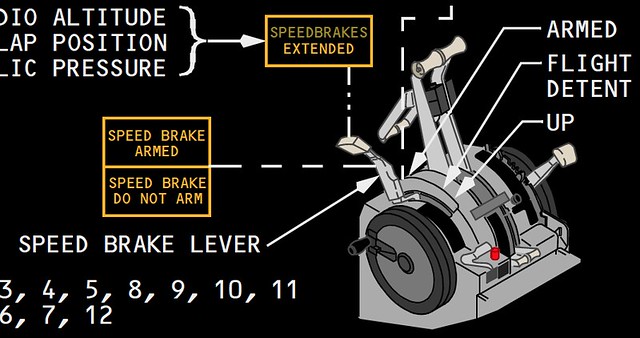
スポイラー・レバーを下げた(Down)位置からアーム(ARM)位置に設定すると、横のSPEED BRAKE ARMEDランプが点灯します(下图参照)。
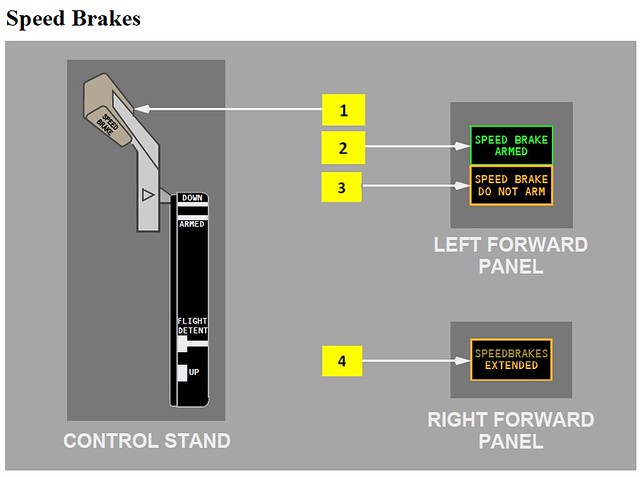 ARMED位置は、自動スポイラー・システムが作動していることを意味します。こうすることで、航空機が滑走路に着陸すると(touch down)、
スポイラー・レバーは自動的に「UP」位置に移動し、それによって内側と外側のスポイラーが自動的に最大位置まで開きます(下图参照)。
ARMED位置は、自動スポイラー・システムが作動していることを意味します。こうすることで、航空機が滑走路に着陸すると(touch down)、
スポイラー・レバーは自動的に「UP」位置に移動し、それによって内側と外側のスポイラーが自動的に最大位置まで開きます(下图参照)。

着陸装置のレバーは、EICASと副操縦士側のPFDの間にあり、レバーの頭部はタイヤの形をしており、非常に識別しやすくなっています。
 着陸装置のレバーをUP状態からDNまで引き下げると、レバー上の緑色の着陸装置表示灯が点灯します。
着陸装置のレバーをUP状態からDNまで引き下げると、レバー上の緑色の着陸装置表示灯が点灯します。
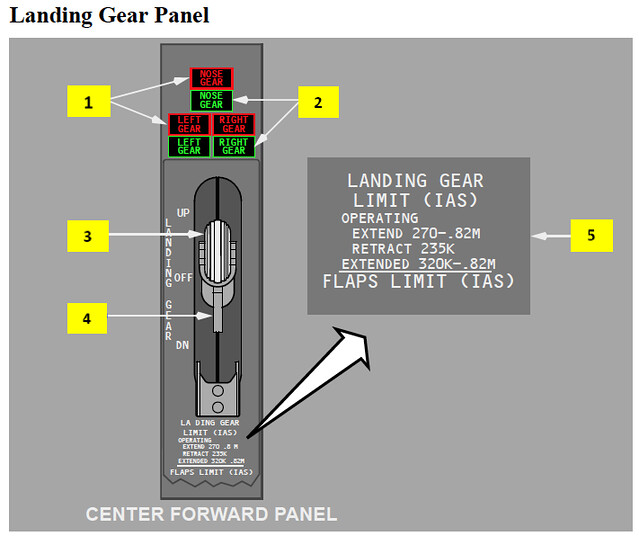 上の図からわかるように、前方の着陸装置と後方の2つの主着陸装置のランプは分かれており、
いずれかで故障が発生した場合、表示灯を見ればどちらかを知ることができます。
上の図からわかるように、前方の着陸装置と後方の2つの主着陸装置のランプは分かれており、
いずれかで故障が発生した場合、表示灯を見ればどちらかを知ることができます。着陸前チェックリストが完了し、同時に航空機もILSのグライドスロープを追跡して高度を下げ続けています。 垂直方向の降下率は約700フィート/分に維持されており、対気速度も継続的に低下させる必要があります。 パイロットはMCPで目標速度を設定し続け、それに伴ってフラップを徐々に下ろしていきます。例えば、今回の着陸でフラップ30を使用する場合、 最終的には速度をVref30+5(例えば133ノット)に設定します。 PFDのILS表示で航空機が確実にグライドスロープを捕捉(ロック)したことが確認できたら、パイロットは復飛高度(例えば4500フィート)をMCPの高度目標に設定します。 復飛(go around)とは、航空機が降下して着陸する過程で、何らかの特別な状況に遭遇した際、即座に降下着陸を中止し、再び通常の上昇状態に移行するプロセスのことです。
-
旅客機操縦探検6.4 リ pattens
トラフィックパターン(Traffic Pattern、五辺飛行とも呼ばれます)について
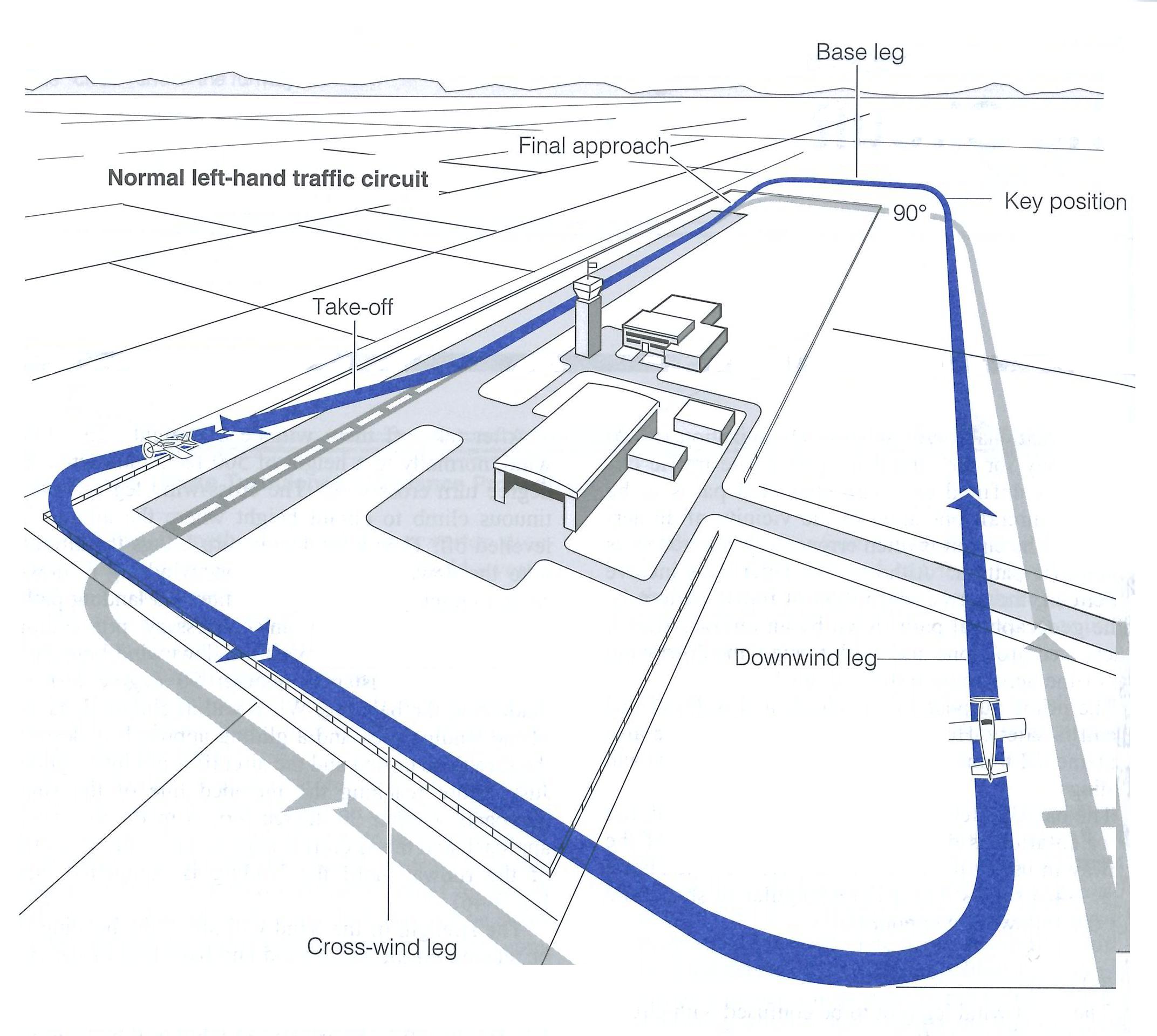
トラフィックパターンは、空港での離着陸を行う航空機のために定められた交通の流れを定義するものです。 この経路は、滑走路に対して長方形を描くように飛行し、特定の高度を維持します。 これにより、パイロットは空港付近を飛行する他のパイロットの位置を予測し、把握することができます。 トラフィックパターンはまた、パイロット訓練においても重要な課題であり、五辺飛行を通じてパイロットは離陸、上昇、旋回、水平飛行、降下、着陸といった重要な飛行技術を学びます。
トラフィックパターンには5つの主要な辺があります:
- 一辺(出発辺、Departure、または Upwind)
- 二辺(クロスウィンドレグ、Cross-wind leg)
- 三辺(ダウンウィンドレグ、Downwind leg)
- 四辺(ベースレグ、Base leg)
- 五辺(ファイナルアプローチ、Final Approach)
経路における旋回方向により、トラフィックパターンは左回り(左トラフィックパターン)
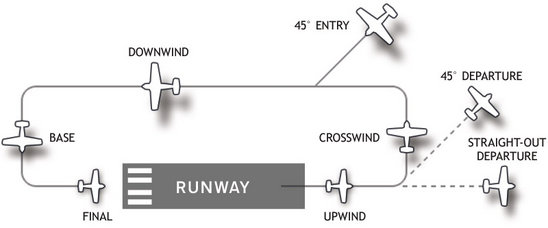
と右回り(右トラフィックパターン)に分けられます。
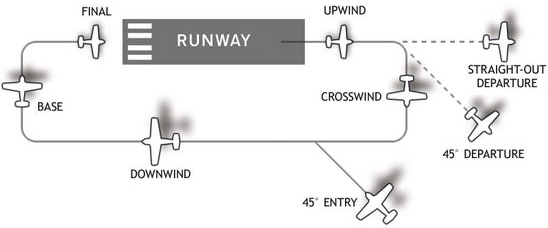
空港のトラフィックパターンは通常、左回りです。 ただし、地形や都市などの条件により制限される場合、あるいは近隣の空港とのトラフィックパターンの交差を避けるために、右回りとなることもあります。 トラフィックパターンの飛行高度は、通常300メートルから500メートルです。
上の図からわかるように、航空機が離陸し出発する際、通常は一辺でストレートアウト・デパーチャー(straight out departure)を行うか、 または45度転回(45° departure)で一辺を離れる方法をとります。 着陸時、航空機は通常、三辺から45度の角度でトラフィックパターンに入ります(上図の45° entry)。 もちろん、航空機が空港を離れて航空路やコースに加わる場合、あるいは航空路やコースを離れて空港に向かう場合は、 その空港の使用細則または進入・出発プログラムで規定された経路と高度に従って上昇または降下しなければなりません。 トラフィックパターンへの参加は、空中交通管制員の許可を得る必要があり、かつ経路に沿って加入しなければならず、横方向から割り込んではなりません。
ILSを使用する航空機の着陸では、一般的には滑走路の方向に沿って、 ローカライザーを捕捉して直線状のまま五辺に入ればよく、これを straight-in ILS approach と呼びます。
しかし、空港の滑走路にILSアンテナが片側にしか装備されていない場合、逆方向への着陸はどうすればよいのでしょうか? その際、Circling Approach の方法を採用できます。 目視盤旋進近(Circling Approach)は、最終進近の計器飛行直後に、 着陸前に空港の周囲で行われる目視での機動飛行です(トラフィックパターンと一致した経路で着陸します)。 独立した進入方式として、これは多くの空港の進入プログラムに存在します。

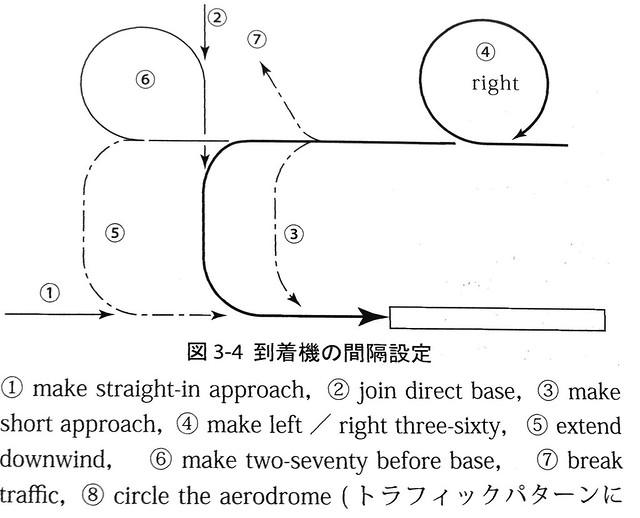
トラフィックパターン上の着陸機については、交通量の混雑状況に応じて、 空中交通管制員がパイロットに対して様々な間隔に関する指示を出すことがあります。 パイロットは命令を受けた後、通常の航路を変更し、具体的な指示に従って飛行ルートを変更する必要があります。 これらの指示には以下の種類があります: 1 straight-in approach:直接進入 2 join direct base:四辺に直接入ってトラフィックパターンに参加 3 make short approach:短い進入。三辺の飛行距離を極力減らす、つまり可能な限り早く着陸するよう指示 4 make left/right three sixty:三辺で左または右に1周(360度)旋回する。四辺・五辺に離着陸中の航空機がいるため、三辺で少し待機させるため 5 extend downwind:三辺を延長する。これも航空機を待機させる一つの方法 6 make two-seventy before base:四辺に入る前に3/4周(270度)回ってから通常通り四辺に入る。別の待機方法 7 break traffic:トラフィックパターンからの離脱。着陸の条件が整っていないため 8 circle the aerodrome:トラフィックパターン上で空港をもう1周回る。より長時間の待機方法
-
x-plane.orgの月間人気アドオン(5月)
x-plane.orgの5月度人気アドオンが発表されました。私はまだインストールしていませんが、いくつかの紹介や動画を見て、なかなか良さそうだと感じたので、ここで紹介します。
最優秀機体 ELA07-S Autogyro by awall86 <img src=http://forums.x-plane.org/index.php?app=downloads&module=display§ion=screenshot&record=138233&id=18973> スペインのジャイロプレーン、ELA07-Sのバージョン1.1です。以前のバージョン1.0は当サイトで以前紹介され、2012年の最優秀機体アドオンの一つに選ばれました。
autogyro)は、通称ジャイロプレーンやオートジャイロと呼ばれ、固定翼機とヘリコプターの中間に位置する回転翼航空機です。ジャイロプレーンの多くは、尾部のプロペラ(推力)によって前進し、尾部のラダーで方向を制御します。そのローターには動力駆動装置がなく、前進時の相対気流によってローターを自動回転させ、揚力を生み出します。ジャイロプレーンは垂直離陸やホバリングができず、固定翼機のように滑走して加速する必要があります。構造は比較的簡単で、安全性も高く、一般的には観光やスポーツ活動に使用されます。 <a href=“http://www.xagyroplane.com/xuanyi.asp"ジャイロプレーンの紹介 B737-200A by cabidgeworm <img src=http://forums.x-plane.org/index.php?app=downloads&module=display§ion=screenshot&record=143589&id=18988> ボーイング737-200。このクラシックな塗装と細長いエンジンを見ると、まるで70年代にタイムスリップしたようです。
Dornier Do.32 ultralight “jeep” helicopter by skycycle <img src=http://forums.x-plane.org/index.php?app=downloads&module=display§ion=screenshot&record=141640&id=19088> またまた珍しい機体が登場です。ドイツのドルニエ Do.32 翼端ジェット式ヘリコプター。一人で自由気ままに飛べる素晴らしい機材ですね。
最優秀シーナリー KECP Northwest Florida Beaches by frede
 フロリダ北西部にあるノースウェストフロリダ・ビーチーズ国際空港(KECP)。非常に細部まで丁寧に作られているように見えます。
フロリダ北西部にあるノースウェストフロリダ・ビーチーズ国際空港(KECP)。非常に細部まで丁寧に作られているように見えます。EDXW Sylt Airport by bosun <img src=http://forums.x-plane.org/index.php?app=downloads&module=display§ion=screenshot&record=139431&id=18974> ズィルト空港(EDXW)。ズィルト島はドイツの避暑天国として有名です。ドイツに行って休暇を取る時間はないけれど、とりあえず X-Plane でその雰囲気を楽しみたいという人に最適です。
KTLH Tallahassee Regional Photoreal by Chris K <img src=http://forums.x-plane.org/index.php?app=downloads&module=display§ion=screenshot&record=148528&id=18871> タラハシー地域空港(KTLH)がアメリカのフロリダ州にある空港であることしか知りません。具体的な特徴については分かりません。今後、時間ができて飛んで確認してみたいと思います。
完
-
旅客機のクロスウィンド・テイクオフの観察
先日、大阪国際空港を訪れ、滑走路32Lの末端で航空機の離着陸を観察してきました。 以下の一連の写真は、ある航空会社のジェット旅客機ボーイング777が左からの風の中で離陸する様子を捉えたものです。 航空機の操縦を理解する上で少しでも役立つかもしれないので、簡単にまとめてみました。
一般的に、滑走を開始した後、パイロットはクロスコントロール(側滑法)を採用します。 左ラダーを軽く踏み込み、機首を風下側(右側)に向け、左からの風による風見効果を打ち消します。 同時に、左からの風が両翼の揚力バランスを崩すのを防ぐため、左翼の揚力が大きく、右翼の揚力が小さくなる状態に対し、パイロットは操縦輪を左に押して左翼の揚力を抑制します。 これにより、全体的には両翼の揚力が等しくなり、航空機は基本的に釣り合いの取れた安定した状態を保ち、機首は滑走路の中央線と一直線に保たれます。
下図は、この側滑法による操縦の説明です。注意点として、この図は右からの風を想定しているため、操縦方法や航空機の姿勢は上記とは逆になります。
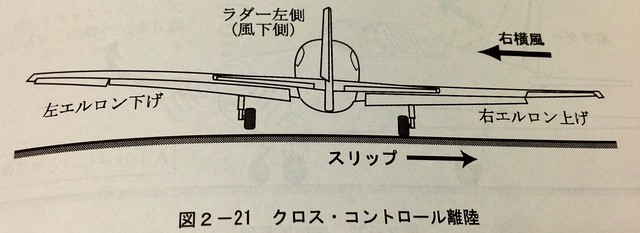
しかし、これはあくまで理想状態での操作に過ぎません。現実には風速や風向は絶えず変化しています。 パイロットは天候状況に応じて臨機応変に対応し、様々なウインドシアに対して即座に柔軟な反応を返す必要があります。
さて、以下の写真をご覧ください。 Vr速度に達した後、パイロットが操縦桿を引き、機首が上げられます。左側の主翼が右側よりも高くなっていることがわかります。 左側の主脚も右側よりも早く地面を離れています。 おそらくこの時の風速がパイロットの予想を超えており、左翼の揚力が右翼を上回ったためでしょう。 その結果、航空機の姿勢は期待されたものと全く逆になり、機体の傾斜(滑り)と偏流が顕著になっています。



航空機が完全に離陸した後、パイロットは側滑法による修正から偏流法による修正へと移行します。つまり、ラダーと操縦桿を中立に戻し、 機首を修正された針路に保ち、正常な上昇グラデーションを維持できるよう、両翼を水平に保つ努力をします。




一連の操作において、機体の進行方向は常に滑走路の中心線上に維持されており、ウインドシアが発生した後もほとんど逸脱していません。 プロのパイロットの技術は素晴らしいですね。
完
-
ジェット機のコックピットを探る6.3 最終進入固定点とILSの設定
6.1節では、航空機が中間進入 fixing point IF (Intermediate Fix) を通過し、水平飛行の状態に入ることを説明しました。 この節では、IF から最終進入 fixing point Final Approach Fix (FAF) へ飛行する過程での操作について解説します。 IF と FAF の関係については <a href="/blog/ja/2013/03/ja-airline_pilot_54"5.4節 で紹介しましたが、ここでもう一度復習しておきましょう。
CDU の NAV/RAD ナビゲーション設定ページで、入力したデータに誤りがないか確認します。 例えば、着陸する滑走路の方位角が128度、無線周波数が110.90MHzであることを確認します。 下図はボーイング777の CUD 表示の概略図です。

フラップ展開の計画に基づいて「Flap 5」のようにフラップ・レバーを設定し、フラップとスラットの展開状況を監視します。
この時点で ATC の管制は塔へ移管されているはずです。 引き続き、東京羽田空港から北海道札幌新千歳空港へ向かう AirSystem115 便を例に説明します。
「アプローチ管制: Air System 115、Hayakita の南方 4 マイル、塔周波数 118.8 へ交信 パイロット: 118.8 へ変更、Air System 115」
パイロットは通信周波数を 118.8MHz に合わせ、塔を呼び出します。 「パイロット: Chitose 塔、Air System 115、Hayakita まで 2 マイル、Spot 16 塔: Air System、塔、了解、Hayakita 通過報告、滑走路 19L、風 220 度 12 ノット パイロット: Hayakita 通過報告 了解、19L、Air System 115」 塔は、パイロットに対し Hayakita 報告点を通過した後、再度連絡するよう求めています。
-
旅客機の操縦探極 6.2 着陸支援システム
着陸支援システムには、いわゆる「ブラインドランディングシステム」である計器着陸システム ILS(Instrument Landing System)や、精密進入航路指示器 PAPI(Precision Approach Path Indicator)が含まれます。 また、滑走路の視程 RVR を測定するための透過計は、空港の滑走路付近でよく見かけることができます。 個人的な体験としては、観光や帰省、出張で飛行機に乗る際、空港内の様々な設備を認識できることで、旅の楽しみも大幅に増すことでしょう。
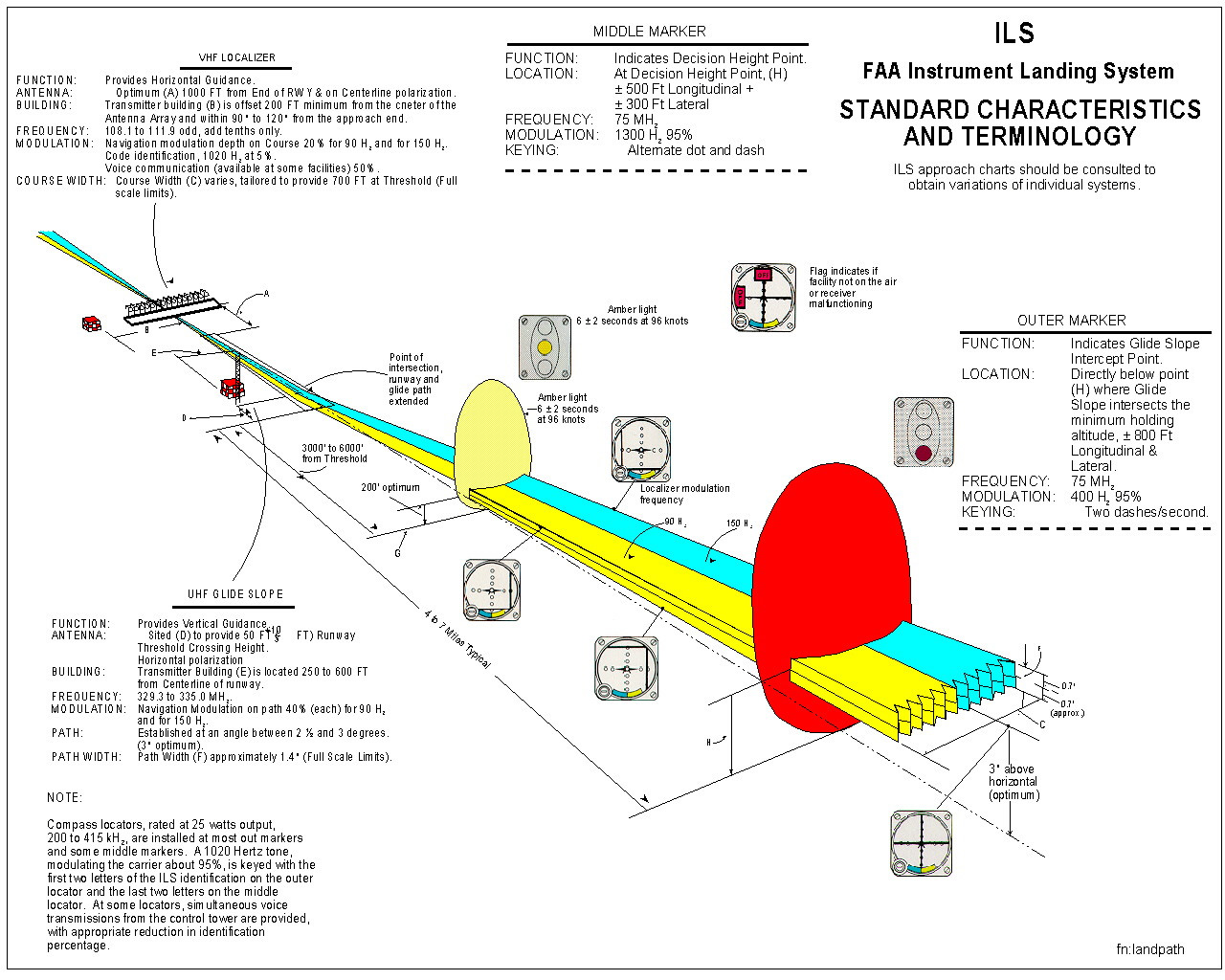
計器着陸システム ILS は、現在最も広く普及している航空機の精密進入および着陸誘導システムです。 その役割は、地上から発射される無線信号によって、水平方向のローカライザ(Localizer)と垂直方向のグライドスロープ(Glide Slope)による誘導を行い、滑走路から空へ向かう仮想の経路を確立することです。 航空機は機上の受信機を通じて、この経路に対する相対位置を把握し、正しい方向で滑走路へ向かって高度を低下させ、最終的に安全な着陸を行います。 計器着陸システムは、低い気象基準やパイロットが視覚的な目標物を全く確認できない状況下でも、航空機を進入着陸させることができるため、通常は「盲降(ブラインドランディング)」と呼ばれています。
ローカライザとグライドスロープの設備が空港内のどこに配置されているかは、以下の ILS システムの概念図で確認できます。

ここから、ローカライザとグライドスロープについて詳しく見ていきましょう。
上の図からわかるように、ローカライザの地上アンテナから発せられる2つの等強度の無線ビームが、黄と青の仮想経路を形成しています。 (左上のローカライザが発射する VHF 信号には、それぞれ 90Hz と 150Hz の振幅変調周波数が使用されているため、滑走路に面する領域を左右の2つに分けることができます。) 進入方向に向かって滑走路を正面に見た場合、左側の黄色いゾーンが 90Hz 信号、右側の青いゾーンが 150Hz 信号となります。 したがって、航空機の受信設備はこれら2つの信号の強度差に基づいて現在位置を判断し、パイロットに対して滑走路の中央線に正対しているかどうかの情報を提供します。 もし中心から逸れていれば、そのずれ量を表示し、パイロットが修正できるようにします。
ローカライザ(Localizer, LOC/LLZ)から発せられる水平方向の指示信号(LOC 信号)の周波数は 108.8 ~ 111.95MHz の間で、ビームは角度の非常に狭い扇状であり、航空機の滑走路に対する進入路(水平位置)の指示を提供します。 ローカライザのアンテナ群は、滑走路の進入方向とは反対側、通常は滑走路の反対側の端から約 300 メートルの位置に設置されています。 以下は、広島空港で私が撮影した写真です。
 このローカライザが一組の赤いアンテナで構成されていることがわかります。位置は 28 番滑走路の末端にあるため、10 番滑走路方向へ着陸する航空機に対して水平指示を提供するものです。
このローカライザが一組の赤いアンテナで構成されていることがわかります。位置は 28 番滑走路の末端にあるため、10 番滑走路方向へ着陸する航空機に対して水平指示を提供するものです。次に、関西国際空港の 06R 滑走路用のローカライザ(LOC)アンテナの写真をご覧ください。
 当日、着陸に使用されたのは同一滑走路の反対方向である 24L で、JAL のボーイング 737 が LOC の真上を通過しているところです。
当日、着陸に使用されたのは同一滑走路の反対方向である 24L で、JAL のボーイング 737 が LOC の真上を通過しているところです。グライドスロープ(Glide Slope, GS または Glide Path, GP)は、約 3 度の仰角を持つビームを利用して、滑走路の入り口に対する航空機の下滑路(垂直位置)の指示を提供します。 グライドスロープは、滑走路の側方 500 フィート、進入端から 1000 フィートの位置にあり、使用周波数は 329 ~ 329MHz で、ローカライザのビームと似ています。 グライドスロープのビーム信号も等強度の 2 つのビームで構成され、地平面に対して 3º の下滑路の上下に分布しています。 下滑路の上側では 90Hz の振幅変調、下側では 150Hz の振幅変調が行われています。 航空機の降下角度が下滑路よりも高い場合、90Hz の電波が強くなり、計器の針は下向きになります。パイロットは機首を下げます。 逆に、150Hz の電波が強い場合、航空機は高度を上げる必要があります。 2 つの電波の強度が均衡しているとき、航空機は正常な 3º の勾配で降下を維持し、滑走路へ平稳に着陸します。
-
X-Plane 10 小型機のVORおよびNDB計器ナビゲーション 入門
X-Plane 11が登場しました!最新のレポート<a href="/x-plane10/2016/11/installing-x-plane-11-demo.>X-Plane 11無料デモ版のインストールと試飛行をご覧ください!
セスナ172を例に、X-PlaneにおけるVORとNDBの使用方法を解説します。
まずは比較的簡単なNDBとADFからです。 機体に搭載されたADF(Automatic Direction Finder、自動方向探知器)は比較的シンプルなナビゲーション機器であり、 地上のNDB(Non Directional Beacon、無指向性無線標識)送信所がどの方向にあるかを指示することができます。 NDBはシンプルな無線送信機です。NDB信号には方位データが含まれているため、ADFは自動的に方向を見つけ出し、 計器に機首がNDB局を指している方向を表示します。
北京首都国際空港の近くを例に挙げましょう。マップモードを開くと、懐柔(Huairou)NDBが確認できます。
 HUAIROU NDBの周波数は380kHzですので、セスナ172のADF受信機の周波数も380に合わせます。
HUAIROU NDBの周波数は380kHzですので、セスナ172のADF受信機の周波数も380に合わせます。
 ADFの周波数表示と調整ノブは上図の右上方にあり、「ADF1」の表記が見えると思います。
周波数を合わせ、かつ機体がNDBの電波受信圏内にあれば、ADFの針が動き始めるのがわかります(上図の左下方)。
針の矢印がNDB局の位置を指しています。
矢印が指す方向へ機体を保って飛び続ければ、NDB局の上空に到達できます。
ADFの周波数表示と調整ノブは上図の右上方にあり、「ADF1」の表記が見えると思います。
周波数を合わせ、かつ機体がNDBの電波受信圏内にあれば、ADFの針が動き始めるのがわかります(上図の左下方)。
針の矢印がNDB局の位置を指しています。
矢印が指す方向へ機体を保って飛び続ければ、NDB局の上空に到達できます。VOR(Very High Frequency Omni-directional Range、超短波全方向式無線標識)についてですが、 その動作周波数帯は108.00 MHz ~ 117.95 MHzの超短波(VHF)帯であることから、その名が付きました。
VOR送信機から送信される信号には2つの種類があります:ひとつは位相が固定された基準信号。 もうひとつの信号の位相は、ビーコン局を取り巻く円周の角度に応じて連続的に変化します。 つまり、各角度から発射される信号の位相はそれぞれ異なります。 360度(磁北を指す)に発射される信号は基準信号と同相(位相差0)であり、 180度(磁南を指す)に発射される信号は基準信号と180度の位相差を持ちます。
航空機側のVOR受信機は、受信した2つの信号の位相差に基づいて、 自機がビーコン局のどの角度から発射される信号上にいるかを計算することができ、 これによりVORを使用して、機体のVOR局に対する相対的な方位を特定することができます。
首都空港の近くにある懐柔(Huairou)VORの周波数は113.6MHzです。 したがって、セスナ172のナビゲーション受信機NAV1(NAV1とNAV2の2つ搭載されています)の周波数を113.6に合わせます。
 次に、NAV1の指示器を見てみます。
次に、NAV1の指示器を見てみます。
 OBS(Omni Bearing Selector、全方位選択器)ノブを調整し、
白色の垂直線であるコース偏差指示器(CDI, Course Deviation Indicator)の針が円形指示器の正中央にくるようにします。
この時、コースインジケーターの黄色い「TO」矢印が指している数字が、VOR局の方位となります。
例えば上図では、懐柔VORは機体の40度の方向にあることを示しています(実際には少し中心からずれていますので、もう少し調整が必要です)。
したがって、機体は40度の針路に沿って飛び続ければ、そのVORに到達できます。
OBS(Omni Bearing Selector、全方位選択器)ノブを調整し、
白色の垂直線であるコース偏差指示器(CDI, Course Deviation Indicator)の針が円形指示器の正中央にくるようにします。
この時、コースインジケーターの黄色い「TO」矢印が指している数字が、VOR局の方位となります。
例えば上図では、懐柔VORは機体の40度の方向にあることを示しています(実際には少し中心からずれていますので、もう少し調整が必要です)。
したがって、機体は40度の針路に沿って飛び続ければ、そのVORに到達できます。 -
旅客機操縦の探秘6.1 レーダー誘導進着時の操縦
5.6節では、レーダー誘導を行う際の航空管制官との会話についてまとめましたが、以下では到着(アプローチ)進入中のパイロットの具体的な操作についてまとめます。
管制が「Air System 115, Turn Left Heading 040」のように針路の指示を発した場合、 つまり航空機に対して左旋回して方位角40度の針路をとるよう要求していることになります。 パイロットは、モード制御パネルMCP(Mode Control Panel)のHEADING(針路)ノブを調整し(下記のボーイング737のMCP図を参照)、
 ディスプレイ内の数値を040に合わせます。そしてノブの下にあるHDG SELスイッチを押すと、
この時、FMA(フライトモードアナウンス)のモードが変化し、それまでの水平航行LNAVから針路選択HDG SELモードに切り替わります。
ディスプレイ内の数値を040に合わせます。そしてノブの下にあるHDG SELスイッチを押すと、
この時、FMA(フライトモードアナウンス)のモードが変化し、それまでの水平航行LNAVから針路選択HDG SELモードに切り替わります。この変化は、下図のFMA(Flight mode annunciation)飛行方式信号器の状態遷移図で確認できます。
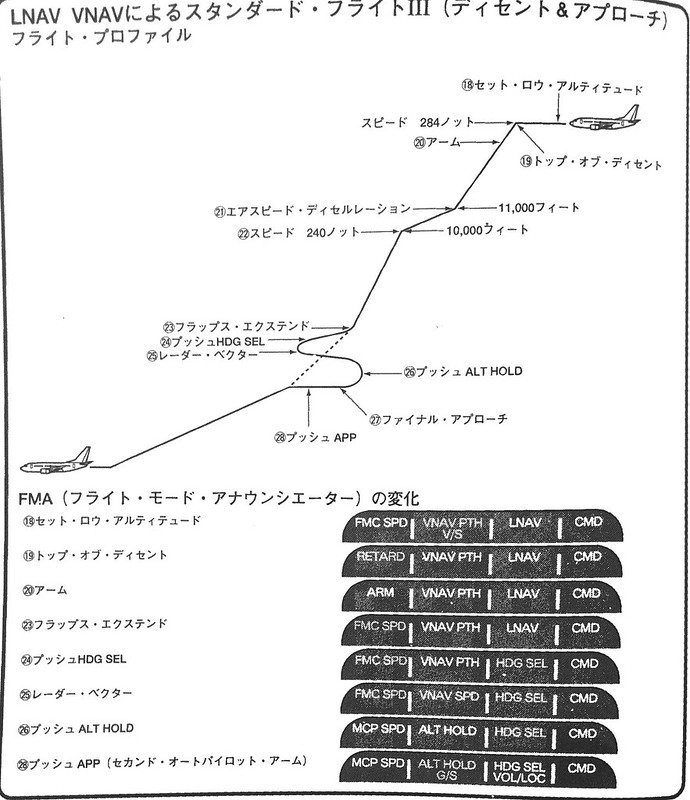 23の飛行状態において、HDG SELを押すと、水平方向の制御は24の針路選択状態に切り替わります。
したがって、針路の制御はフライト管理コンピュータではなく、パイロット自らの手動管理に移行します。
23の飛行状態において、HDG SELを押すと、水平方向の制御は24の針路選択状態に切り替わります。
したがって、針路の制御はフライト管理コンピュータではなく、パイロット自らの手動管理に移行します。
しかし、MCPは航空機の飛行方向を管理しているに過ぎず、具体的な旋回動作はコンピュータによる自動的な舵面の調整に依存していることを理解する必要があります。 一般的に、標準的な旋回では航空機は30度のロールを行います(単に垂直尾翼のラダーを動かすだけではありません)。 左右のエルロン(補助翼)によって生じる揚力の差を利用して機体を左右に傾け、旋回を行います。 例えば左旋回をしたい場合、左側のエルロンは上がり、右側のエルロンは下がります。そのため、右側の主翼が発生する揖力は大きくなり、 左側の揚力は小さくなります。両側の揖力のアンバランスにより、航空機の機体は左に傾き、左への旋回を開始します。

機首の方向が目標の針路に徐々に近づくと、コンピュータは再びエルロンを調整して傾斜角度を徐々に減少させ、 針路040度(北東方向)に到達した時、ちょうど航空機が水平飛行の状態になるようにします。
レーダー誘導が開始されたため、パイロットは垂直高度航行VNAVモードを切り、 手動高度制御モードを開始します。例えば、現在航空機が4000フィートの高度で水平飛行状態にある場合、 パイロットはALTITUDE(高度)ノブの下にあるALT HLDスイッチを押し、航空機を現在の高度に維持します。 それに伴いFMA飛行方式信号も切り替わり、自動スロットルモードはFMC SPDからMCP SPDへ、 同時にピッチモードはVNAV ALTからALT HOLDモードへと移行します。 この変化は、上記のFMA状態遷移図の第25および26項にそれぞれ示されています。 これにより、航空機の高度制御もFMCから切り離され、パイロットがMCP上で直接制御するようになります。
自動スロットルモードがFMC SPDからMCP SPDに入ると、 それまで表示されていなかったMCP上の速度指示器IAS/MACHが点灯し、 現在の航空機の対気速度が表示されます。 何も調整しなければ、コンピュータは自動的にスロットルを調整し、この速度を維持して飛行を続けます。 パイロットは、標準計器到着経路(STAR)および計器進入方式の要求に基づいて速度を調整し、 必要に応じて適切にフラップを下ろし、かつ対気速度が機体強度の制限を超えないよう、フラップ機動速度を管理します。
マニュアルの規定によると、フラップ機動速度は5.7節で言及したVREF基準速度を基準とし、 重量の変化に伴い、以下のフラップ計画に従って航空機の速度が失速速度以下にならないよう保証されています。
ボーイング737を例にとると、VREFを採用した場合のフラップ位置40におけるフラップ機動速度は以下の通りです: フラップ位置1 の時のフラップ機動速度 VREF+50ノット フラップ位置5 の時のフラップ機動速度 VREF+30ノット フラップ位置10 の時のフラップ機動速度 VREF+30ノット フラップ位置15 の時のフラップ機動速度 VREF+20ノット フラップ位置25 の時のフラップ機動速度 VREF+10ノット フラップ位置30 の時のフラップ機動速度 VREF30 フラップ位置40 の時のフラップ機動速度 VREF40
-
PA28 181 ARCHER II 2.0
昨年のCarenadoのクリスマスセールで購入したPA28 181 ARCHER IIが、つい先日バージョン2.0になりました。 今朝さっそくアップグレードしてみたところ、新バージョンはX-Plane 10に最適化されていて、 以前のバージョンよりもかなり動作が軽くなっていました。これでもう1.0には戻れないでしょう。
2.0の変更点にはサウンドの大幅改善も含まれています。 スロットルの位置に応じてエンジン音が明らかに変化するのがわかります。 また、ドアの開閉、タイヤの接地、フラップの作動時のサウンドも以前よりリアルで、全体的な臨場感がかなり向上しました。
さらに画面の左下にコントロールボタンが追加されました。
 画像のように、CキーとOキーがあります。
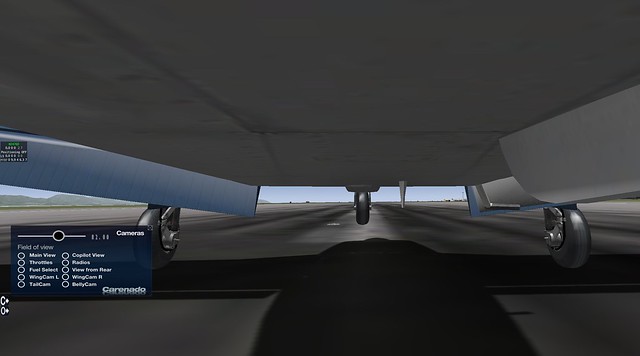
画像のように、CキーとOキーがあります。Cキーは視点を変更するためのもので、機長席、副操縦席席、後部座席、スロットル操作視点、燃料タンク操作視点、コミュニケーション操作視点、左右主翼端視点、垂直尾翼視点、機体下部視点などが含まれています。視野角(FOV)も簡単に変更できます。 Oキーはキャビンドアや貨物室ドアなどを開閉できます。
では、いくつか写真をご紹介します。
両方のドアを開放

機体下部視点
右翼端視点

今回のアップグレードにはとても満足しています。ぜひお試しあれ。
完
-
ZBSJ石家荘正定国際空港シーナリー for X-Plane 10.20
Weiboの常犯井的三胖さん、すなわちx-plane.orgのShaneMontoyaさんが、再び私たちに新しい驚きをもたらしてくれました。 今回は石家荘正定国際空港のシーナリーです。 早速インストールして試してみましたが、非常に満足できる出来栄えでしたので、すぐにみなさんに紹介し、記念にスクリーンショットを数枚撮っておきました。
この空港はあまり大きくありません。出発前に、まずターミナルの前で搭乗し、荷物を積み込みます。
 それから地上を少し散歩してみます。
それから地上を少し散歩してみます。
 東方航空や中国南方航空のA320や737がたくさんありますね。
東方航空や中国南方航空のA320や737がたくさんありますね。
 あっ、ここには貨物扱い所もあります。
あっ、ここには貨物扱い所もあります。

滑走路の末端までぶらついていき、離陸、そして左旋回へ。
 ダウンウインドで、非常にモダンな建築様式のターミナルビルや、駐車場、公園をじっくり見てみましょう。
ダウンウインドで、非常にモダンな建築様式のターミナルビルや、駐車場、公園をじっくり見てみましょう。
 それから旋回して戻り、滑走路上空からターミナルのこちら側とエプロンを見てみましょう。
それから旋回して戻り、滑走路上空からターミナルのこちら側とエプロンを見てみましょう。
 空港はあまり大きくありませんが、地上設備はすべて揃っており、至る所に看板、トウバー、給油車、貨物コンテナがあり、本当にそこにいるような感覚になります。
以前は北京の近くばかりを飛び回っていましたが、今後は暇なときには石家荘にも遊びに来てもいいかなと思っています。
空港はあまり大きくありませんが、地上設備はすべて揃っており、至る所に看板、トウバー、給油車、貨物コンテナがあり、本当にそこにいるような感覚になります。
以前は北京の近くばかりを飛び回っていましたが、今後は暇なときには石家荘にも遊びに来てもいいかなと思っています。最後に、インストール方法を簡単に説明します。 <a href=“http://forums.x-plane.org/index.php?app=downloads&showfile=19120"x-plane.orgの本家からインストールパッケージをダウンロードし、解凍後にZBSJ_Shijiazhuang_ZhengdingディレクトリをCustom Sceneryディレクトリにコピーするだけです。 また、scenery_packs.iniに以下を追加するのを忘れないでください: SCENERY_PACK Custom Scenery/ZBSJ_Shijiazhuang_Zhengding/ これでOKです。とても簡単でしょう。
最後に、シーナリーアドオンの作者の素晴らしい作業に再度感謝します。皆さんも<a href=“http://forums.x-plane.org/index.php?app=downloads&showfile=19120"x-plane.orgに行って5つ星の投票で応援してくださいね。
完
-
X-Plane マルチモニター設定方法 multi monitors
X-Planeには標準でマルチモニター表示をサポートする機能が備わっています。 もし4台のディスプレイを用意して、それぞれ左側、中央、右側のコックピットウィンドウを表示し、 さらに別の1台で計器類を表示することができれば、フライトシミュレータの楽しみは格段に増すでしょう。 残念ながら私はそのような数多くのディスプレイを持っていません。主に、買う予算がなく、設置場所もないからです。 また、もし1台のコンピュータで4台のディスプレイを駆動しようとすれば、非常に強力なハードウェア環境が必要になります。 iMacはグラフィックボードの増設に対応していないため、マルチディスプレイ環境でもスムーズに動作させることは困難です。 そこで今回は、複数のコンピュータを利用したマルチスクリーン表示の設定方法について紹介します。
複数のコンピュータを利用する利点は数多くあります。例えば、描画処理が各マシンのハードウェアに分散されるため、 表示速度ははるかに速くなります。 また、様々なニーズに合わせて各マシンの用途を設定できるため、X-Planeの遊び方を極めて豊かにすることができます。 例えば、2人で2台のマシンを使い、1人が機長、もう1人が副操縦士(コ・パイロット)として役割を分担し、協力してクルー飛行を行うことができます。 あるいは、インストラクターと学生に分担し、学生が操縦を担当し、インストラクターが観察して飛行の修正を行うことも可能です。
ソロ(単独)飛行時にもマルチスクリーンは活用できます。例えば、1台のマシンで操縦・飛行を行い、もう1台をコンソールとして他の情報の表示や操作に専念させます。 コンソールでは、各種計器の表示と設定、通信機器の操作、あるいは天候の設定などが行えます。 例えば、横風での離陸、巡航、着陸の練習をする際、専用のコンソール用マシンで風向きや風速などを変更して、集中的な練習を行うことができます。 また、コンソールを使って、エンジンの空中停止時のような緊急事態における操作手順を訓練することも可能です。
以下、導入方法を紹介します。 まず、2台のコンピュータを用意し、同じローカルネットワークセグメント内にネットワーク設定を行い、 2台のマシン間でTCP/IP経由の接続ができるようにします。 同時に、同じバージョンのX-Planeをインストールし、機体プラグインや地形プラグイン(シーナリー)の内容も一致させるように注意してください。
次に、どちらのマシンをマスター(親機)にするか決定します。ジョイスティックやラダーペダルなどの外付けコントローラはすべてこのマシンに接続します。 もう一方はサブマシン(子機)または外部モニターとして使用し、用途は副操縦士席などとします。
2台のマシンでX-Planeを起動し、設定メニューを開き、「Net Connections」を選択して「MultiPlayer」タブを開きます。 ダイアログの上部に自分のIPアドレスが白い文字で表示されているのが確認できます。

続いて、飛行データのネットワーク接続を行います。X-Planeの「Settings」メニューから「Net Connections」を開き、 「MultiPlayer」タブを選択します。マスター側でサブマシンのIPアドレスを入力し、チェックを入れます(下図参照)。
サブマシン側でも同様の手順で、マスターのIPアドレスを入力し、チェックを入れます。
さらに、左下の「aircraft name reading suffix」欄に、副操縦士用のファイル名サフィックス「_copilot」を入力します。
こうすることで、サブマシンは、マスターで選択して開かれた機体ファイルに基づいて、自動的にサブマシン用に修正されたファイルを開くようになります。もしサブマシンを単なる外部ディスプレイとして使用したい場合は、「Extern Visual」タブを選択してサブマシンのIPを設定します。 もしサブマシンを制御端末(インストラクター端末)として使用したい場合は、「Instructor」タブを選択してサブマシンのIPを設定します。
準備が整いました。接続の成果を確認してみましょう。マスターでBoeing 747-400を選択して開くと、マスターはそのデータをサブマシンへ送信します。 サブマシン側では何も操作を行わなくても、自動的にその機体が開かれ、マスターがいる空港のエプロン(駐機位置)へ自動的に移動します。 マスターでの操縦操作もすべてサブマシンへ自動的に反映されます。
これで基本的な設定は完了です。以下、微調整を行うことができます。各マシンにおいて役割分担に応じて、 表示範囲(視野)を設定することができます。 方法は、「Settings」メニューの「Rendering Options」で、左右の表示視野角「lateral field of view」を設定します。
 例えば、左前方のコックピットビューとして表示したい場合、「lateral offset for networked scenery」を-45度に設定します。
同様に、正面は0度、右前方は45度に設定できます。
垂直方向のオフセットについても同様に数値を入力して個別に調整可能です。
例えば、左前方のコックピットビューとして表示したい場合、「lateral offset for networked scenery」を-45度に設定します。
同様に、正面は0度、右前方は45度に設定できます。
垂直方向のオフセットについても同様に数値を入力して個別に調整可能です。完
-
地図を使った航跡の確認
春は旅行に適した季節ですが、その副作用として当ブログはしばらく放置気味となってしまい、申し訳ありません。5月の中旬までには旅客機操縦の探検シリーズを必ず完結させます。(京都、奈良、福島、東京、長野などで撮影した写真の方は、なかなかの収穫でした)
今日は約1時間ほど飛行し、旋回しながらの高速降下とILS着陸を練習しました。完了後にマップモードで航跡を確認してみると、 なかなか良い飛行だったように感じたので、スクリーンショットを撮って記念に残しました。
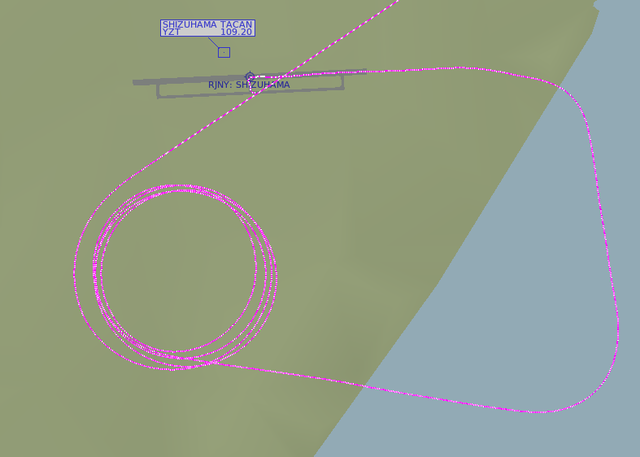 上記は旋回降下時の航跡です。バンク角30度を維持して、10,000フィート以上の高度から高速で旋回しながら降下し、
その後1,000フィートの高度で水平飛行に移ってベースダウン、ファイナルへと進入し着陸しました。
旋回部分の円が比較的整っているのを見て、少し達成感を感じました。
上記は旋回降下時の航跡です。バンク角30度を維持して、10,000フィート以上の高度から高速で旋回しながら降下し、
その後1,000フィートの高度で水平飛行に移ってベースダウン、ファイナルへと進入し着陸しました。
旋回部分の円が比較的整っているのを見て、少し達成感を感じました。-thumb-640x191.png) 次に上の画像は、3度の滑り角で着陸する際の航跡です。飛行は比較的安定しており、
高度の維持により、滑らかな3度の降下角度が保たれていました。PAPIは常に2赤2白の状態をキープし、
滑走路への進入時の高度も概ね正しく50フィートに維持されていました。
最後にフレアを行い、着地時の垂直降下率は1分あたり110フィート。
完璧ではありませんでしたが、着陸プロセス全体には概ね満足しています。
次に上の画像は、3度の滑り角で着陸する際の航跡です。飛行は比較的安定しており、
高度の維持により、滑らかな3度の降下角度が保たれていました。PAPIは常に2赤2白の状態をキープし、
滑走路への進入時の高度も概ね正しく50フィートに維持されていました。
最後にフレアを行い、着地時の垂直降下率は1分あたり110フィート。
完璧ではありませんでしたが、着陸プロセス全体には概ね満足しています。とにかく、X-Planeのマップ機能を多用することは、自身の飛行技術向上に非常に役立ちます。皆さんもこの機能をより有効に活用されることをお勧めします。
完
-
X-Plane 10.21 リリース候補 1
昼、良いニュースを目にしました。最新版10.21RC1がリリースされ、ついにMac上で日本語環境等で起動しない問題が修正されたのです。 夜に家に帰って早速アップグレードしてみたところ、確かに私を半年以上も悩ませていたこの大きなバグはついに修正されました。開発者の皆様、ご尽力ありがとうございます。
<a href=“http://wiki.x-plane.com/Beta#X-Plane_10.21_Release_Candidate_1"10.21このバージョンについてですが、新しい機能は特にありません。主に表示面や特定の機体の多くのバグが修正された程度です。 使い方は10.20と基本的に大きな違いはなく、表示面は10.20よりも多少軽快になった気がします。 大きな変更がないため、大きな欠陥もなく、安心して使えます。ですので、皆さんもアップグレードすることをお勧めします。
完
-
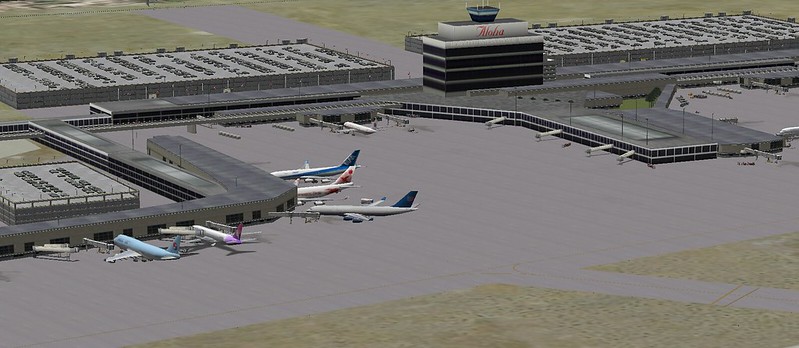
タイトル:ハワイ・ホノルル国際空港地上シーナリー USA_HI_PHNL_Honolulu Intl v 2.1
先日また、無料のホノルル国際空港(PHNL)のシーナリーを見つけました。作者は有名なFreddyさんです。
おすすめする理由は、滑走路や空港内の建物が充実している点です。メインターミナルだけでなく、南側にあるFedexなどの宅配便会社や、ゼネラル・アビエーション用のエプロンも含まれており、フライトのリアリティがかなり高まります。さらにすごいのは、アメリカ空軍のエリアも再現されていることです。F-15、C-17、DC-10などの軍用機や格納庫を見ることができ、これはまさに意外なおまけです。
さらに多くの写真は<a href=“http://fred-e.net/2013/01/08/usa_hi_phnl_honolulu-intl-v-2-1/"こちらでご覧ください。ここでは簡単にインストール方法を紹介します。
まずFreddyさんが作成したX-Planeシーナリーの一覧をご覧ください。アラスカ、フロリダ、ハワイ、ニューヨーク、ニュージャージー、テキサスなど、多くの空港のシーナリーがあります。必要に応じてお好きなファイルをダウンロードできます。<a href=“http://baronrouge1959.files.wordpress.com/2013/02/usa_hi_oahu_phnl_honolulu-intl-v2-1.zip"ホノルル国際空港のファイルはここにあります。リンクをクリックして圧縮ファイルをダウンロードし、解凍してできたディレクトリ「USA_HI_OAHU_PHNL_Honolulu Intl v2.1」を、X-Plane10のメインディレクトリにある「Custom Scenery」ディレクトリにコピーすればOKです。
Custom Sceneryディレクトリ内にある「scenery_packs.ini」ファイルを修正するのを忘れないでください。最終行に以下を追加してください。 SCENERY_PACK Custom Scenery/USA_HI_OAHU_PHNL_Honolulu Intl v2.1/ これでインストール完了です。
最後になりますが、ハワイを飛ぶなら、以前紹介した>simheavenのシーナリーアドオンの中にある<a href=“http://simheaven.com/?page_id=208&wpfb_file=6"ホノルルの衛星写真シーナリーパックもあわせてダウンロードすることをお勧めします。この2つのシーナリーを同時にインストールすると、3Dモデル化された空港や山脈と、実際の衛星写真による地表の両方を見ることができ、リアリティが大幅に向上します。特に、オアフ島の名所であるダイヤモンドヘッド上空を飛行する際の風景は特に美しく、思わず感心してしまいます。
完
-
様々な高度 MEA MOCA MORA MAA MCA MRA
出典:ジェプセン航空図チュートリアル MEA 最低航路高度 Minimum Enroute Altitude 無線位置標識間の最低高度。通常は航空路コードボックスの上部または下部に表示されます(例:「←10000 8000→」、「←6500」、「→9900」)。矢印は飛行方向を示します。 MOCA 最低超障高度 Minimum Obstruction Clearance Altitude 各無線位置標識間で公布されている有効な最低越障高度。高度と接尾辞「T」で表されます(例:1300T)。 Enroute MORA 航路最低偏航高度 Enroute Minimum Off Route Alititude 航路中心線と位置標識から10海里以内において、基準点の障害物を越えるための超障余度を確保する高度。高度と接尾辞「a」で表されます(例:1300a)。 MAA 最高批准高度 Maximum Authorized Altitude ある空域または航区における、利用可能な最高高度または飛行高度層の公布高度(技術的な制限、地上設備の制限等による)。高度と接頭辞「MAA」で表されます(例:MAA 25000またはMAA FL240)。 MCA 最低穿越高度 Minimum Crossing Altitude 航空機がMEAの低い航区からMEAの高い航区へ向かう際、特定の位置標識を通過するために必要な最低飛行高度。高度、航空路、飛行方向、接頭辞「MCA」で表されます(例:「MCA V-283-372 7400E」は、V-283またはV-372航空路を東へ飛行する場合の最低通過高度が7400フィートであることを示します)。 MRA 最低受信高度 Minimum Reception Altitude 交差地点の位置を確定できる最低高度。高度と接頭辞「MRA」で表されます(例:MRA 9500)。 -
旅客機操縦探秘5.7 降下中の操作まとめ
本節では、パイロットの降下操作について簡単にまとめます。機種は引き続きボーイング737を例とします。
まず注意が必要なのは降下プログラムです。降下開始点(TOD)の80海里手前から開始し、10,000フィート平均海面高度(MSL)で完了する必要があります。
降下の準備として、ATISまたはACARSを使用して目的地空港の最新の気象実況、アプローチ手順、滑走路の状況を取得し、気象レーダーで降下域の天候を観測し、アプローチ方式、空港資料図、アプローチ図などの準備を行います。
次に副操縦士がCDUへの着陸航路の設定、目的地空港の着陸高度の設定を行います。
その後、機長と副操縦士で操縦と通信の交代を行い、副操縦士が操縦を担当します。機長は航空機の残燃料とバランス燃料の確認を慎重に行い、必要に応じて防冰スイッチを入れ、CDU上の到着およびアプローチ手順の設定を確認し、各ウェイポイントの高度および速度制限を確認します。アプローチ基準ページで着陸重量/VREF/QNHまたはQFEの設定を確認し、降下予報ページに遷移高度層/予報風情報を入力し、ナビゲーション周波数(VOR/ILS/DMEなど)を設定し、オートブレーキを選択します(通常は1または2、滑走路の長さが短い場合や积水している場合は3またはMAXを選択)、そしてアプローチ・ブリーフィングを完了します。
その後、機長と副操縦士は再度、操縦と通信の交代を行い、降下チェックリストの実行を開始します。
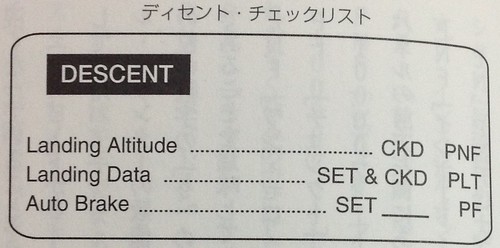 降下チェックリストの内容には、着陸高度の確認、着陸データの設定と確認、およびオートブレーキの設定が含まれていることがわかります。
降下チェックリストの内容には、着陸高度の確認、着陸データの設定と確認、およびオートブレーキの設定が含まれていることがわかります。CDUで計算された降下開始点(TOD)に到達する前に、機長は副操縦士に管制への降許可の要求を指示します。許可を得た後、MCPで到着手順の初期点の降下高度を設定し、VNAVモードにより航空機を制御し、FMCが自動計算したTOD点まで飛行して自動降下を開始します。
高度が下がり遷移高度層に近づいたら、気圧高度計を標準大気QNEから修正海面気圧QNHに修正する必要があります。
 <a href=<a href="/blog/ja/2012/10/ja-airline_pilot_43.html<a href=>" 4.3 飛行高度と気圧および最大飛行高度でこの設定について詳しく解説したため、ここでは繰り返しません。
<a href=<a href="/blog/ja/2012/10/ja-airline_pilot_43.html<a href=>" 4.3 飛行高度と気圧および最大飛行高度でこの設定について詳しく解説したため、ここでは繰り返しません。航空機の垂直方向の平均降下率は通常400メートル/分、約24キロメートル/時であるため、巡航高度の10,000メートルから地上に降下するまでには約25分かかります。
航空機の主翼上部には、スポイラー(Spoiler、時にはリフトダンパーとも呼ばれる)と呼ばれる装置が装備されており、内側スポイラー(Inboard Spoiler)と外側スポイラー(Outboard Spoiler)の2つの部分に分かれています。空中で降下する際に外側スポイラーを上に開くと、揚力が減少し空気抵抗が増加し、減速の目的を達成できます。
 上の写真は、私がANAのボーイング777-200に搭乗し北京首都国際空港へ向かう降下中に撮影したもので、主翼中央にあるスポイラーが一部だけ開いているのがわかりますが、これだけでも航空機に必要な抗力を得るには十分です。
上の写真は、私がANAのボーイング777-200に搭乗し北京首都国際空港へ向かう降下中に撮影したもので、主翼中央にあるスポイラーが一部だけ開いているのがわかりますが、これだけでも航空機に必要な抗力を得るには十分です。別の角度、航空機の後ろ側から見ると、スポイラーが開いた時はこのようになります。
 写真は千葉県上空で撮影されたもので、成田空港へのアプローチ中、機種は777-200ERです。
写真は千葉県上空で撮影されたもので、成田空港へのアプローチ中、機種は777-200ERです。また、滑走路に着陸した後に撮影した以下の写真を参照してください。内側と外側のスポイラーがすべて開き、完全に直立しているのがわかります。このように着陸後、航空機に大きな抗力を与え、主翼が発生する揚力を急激に低下させ、機体とタイヤが完全に接地する目的を達成します。そうすると車輪のブレーキも作動し始め、より大きな減速効果を提供します。
しかし実際にはパイロットにとって、スポイラーを使用する主な目的は減速ではなく、垂直方向の降下率を増やすことにあります。 例えば、降下ルートの前方に積乱雲がある場合、回避機動を行う必要があり、積乱雲を回避してから降下を開始しますが、この時の降下開始点(TOD)はすでに予定地点を過ぎています。予定高度にできるだけ早く到達するため、ここでスポイラーを利用して降下率を大きくし、回避機動によって失われた時間を取り戻すことができます。しかし、スポイラーを使用すると機体の振動や騒音が発生し、乗客にとっては不快に感じる可能性があるため、パイロットは可能な限りスポイラーを使用しない降下計画を検討します。
通常、遷移高度層でアプローチ手順を開始し、初期アプローチ固定点(IAF)またはレーダー誘導の開始前にアプローチ手順を完了します。
アプローチ手順には、客室サインの設定(シートベルトの点灯。10,000フィート以下では地表温度が高く、それによって生じる大気対流現象により乱気流が発生しやすいため)が含まれます。10,000フィートに到達した後、着陸灯およびストロボライトのスイッチを入れます(識別能力を高め、他の航空機または鳥類との空中衝突の確率を減らすため);高度の遷移層で高度計を設定し相互チェックを行います;必要な通信とナビゲーション周波数(VOR/ILS/DMEなど)を設定します。完了後、アプローチチェックリストを実行します。
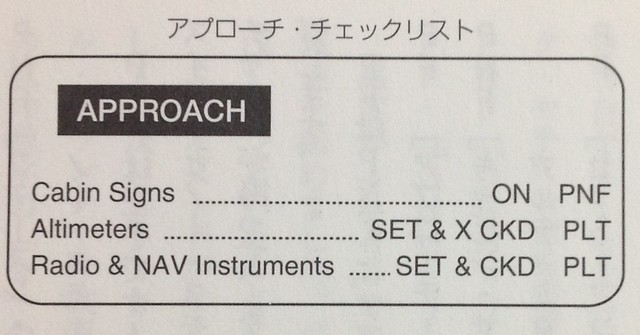 内容は上記の通りで、アプローチ手順で説明した各項目となります。
また、パイロットはシートの調整、ショルダーベルトの装着、客室乗務員への降下準備の連絡を行う必要があります。
内容は上記の通りで、アプローチ手順で説明した各項目となります。
また、パイロットはシートの調整、ショルダーベルトの装着、客室乗務員への降下準備の連絡を行う必要があります。航空機の高度は低下し続け、初期アプローチ固定点(IAF)に徐々に接近します(前の節の紹介を例にすると、高度4,000フィート)、垂直方向の降下率も徐々に低下し、航空機の姿勢は水平飛行状態に近づき始めます。
降下しなくなったため、エンジンはアイドリングのままにできず、スロットルを増やし、航空機が十分な揚力を保持する必要があります。もちろん、これはコンピュータのオートスロットルによって自動的に制御されます。そのため、客室内の乗客も、降下段階より外のエンジン音が大きくなったと感じることができ、経験豊富な乗客はすぐに着陸することを知るでしょう。
最後に、航空機の防氷システムに関する知識を少し補足します。
航空機が高い航路を飛行する際、航空機の表面温度は0℃以下になります。航空機の降下中に湿った空気に遭遇した場合、この時の環境温度が氷点以上であっても、透明の氷や霜が形成され、航空機の正常な飛行に影響を与える可能性があります。
過冷水滴(supercooled water droplet)は、負の温度で凍結していない液状の水滴です。地上条件では零度を下回ると水が凍ることは誰もが知っていますが、高空にはこの特殊な水が存在し、水の中に凝結核が不足しているため、零下10度甚至数10度でも液状のまま保たれています。航空機が過冷水を含む雲層を通過する際、雲中の過冷水が航空機に接触すると、凝結核がある場所ですぐに氷となり、航空機の機体がその凝結核となります。
航空機の主翼に氷が付着すると、空気力への影響は非常に大きくなります。風洞試験によると、主翼の前縁に半インチ厚の氷が付着すると、揚力が50%減少し、抗力が60%増加し、深刻な場合は機体の破壊や人の死につながる重大な事故を引き起こす可能性があります。同じように深刻なのはエンジンの結氷です。もしエンジンカウルに氷が付着し、氷の塊がエンジン内部に吸い込まれると、ファンなどの重要な部品を破損し、エンジン故障を引き起こす可能性があり、その危害は言うまでもありません。
ボーイング737を例にすると、
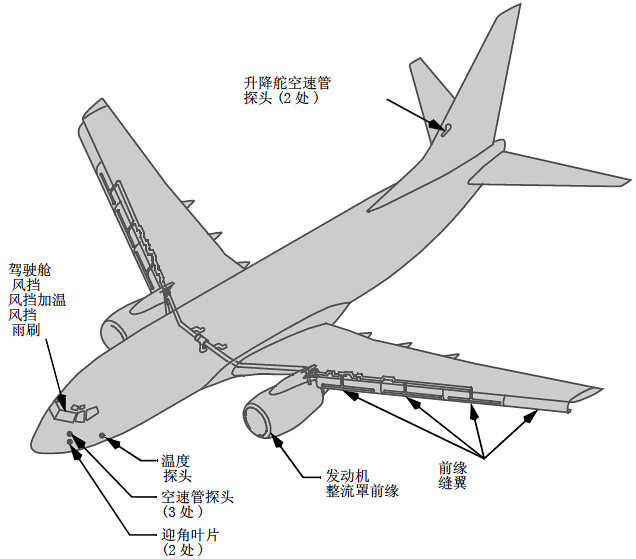 機上の防氷システムには通常、コックピットの風挡加温、風挡ワイパー、プローブおよびセンサー加温、エンジン防氷、主翼防氷、および着氷検出などのサブシステムが含まれます。
機上の防氷システムには通常、コックピットの風挡加温、風挡ワイパー、プローブおよびセンサー加温、エンジン防氷、主翼防氷、および着氷検出などのサブシステムが含まれます。ピトー管(ピトー管)プローブ、大気全温プローブ、および迎角ブレードはいずれも飛行データを取得する重要なセンサーであり、もし結氷のために飛行速度/気圧/温度などのデータを取得できない、または正しく取得できない場合、飛行コンピュータとパイロットは航空機を正しく操縦することができなくなります。そのため、これらの設備はすべて電気加熱を採用し、結氷しないように保っています(静圧孔は加熱しません)。
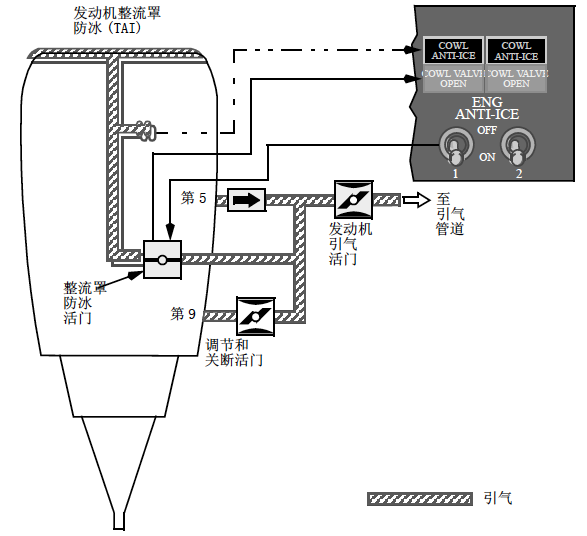
エンジン防氷システムは、エンジン内の高温高圧空気をエンジンカウルの前縁に導き、熱気を利用してカウルを加熱し、結氷を防ぐ目的を達成できます。コックピット内のENG ANTI-ICEスイッチでこのシステムの作動を制御できます。
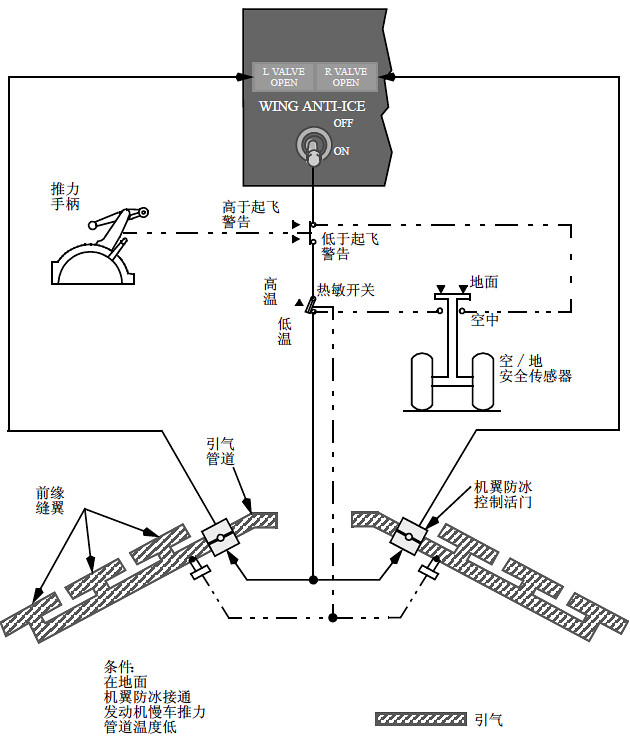
主翼防氷システムもエンジンの熱気を使用します。このシステムは内側の前縁スラットのみに保護を提供し、前縁フラップや外側の前縁スラットにはサービスしません。コックピット内のWING ANTI-ICEスイッチで制御されます。
完 <a href=Prev: 降下過程での空管交信 TOC: 目次 <a href=Next: アプローチレーダー誘導時の操作
-
旅客機操縦探秘5.6 降下中の空管交信
航空機の降下を開始する前には、必ず空中交通管制の許可を得る必要があります。本節では、巡航から降下フェーズにおける通信内容を簡単にまとめます。 引き続き、東京羽田空港から北海道札幌新千歳空港へ向かうAirSystem115便を例に挙げます。
航空機が札幌三沢西区域管制センターのエリアに入ると、東京管制区の管制官は当該便の管理を札幌三沢西区域に引き継ぐ必要があるため、指示を出します: “Air System 115, Contact Sapporo Control 133.3” つまり、 “Air System 115、札幌三沢西区域133.3へコンタクトしてください"という意味です。 パイロットは次のように回答します: “133.3 Air System 115” そして、無線周波数を133.3MHzに変更し、管制にコンタクトします: “Sapporo Control, Air System 115, FL410” これは、 “札幌管制、Air System 115です。現在の飛行高度は41000フィートです” という意味です。札幌三沢西部管制区の管制官が報告を受け取り、レーダーで確認できた場合、次のように回答します: “Air System 115, Sapporo Control, Roger” これは “Air System 115、札幌三沢西部管制区です、受信"を意味します。
航空機が札幌三沢西部管制区を飛び越えると、次は札幌北海道南区域管制センターに入ります。ここで再び引き継ぎの通信が行われます。 管制官:Air System 115, Contact Sapporo Control 119.3(Air System 115、札幌北海道南区域119.3へコンタクトしてください) パイロット:119.3, Air System 115 パイロット:Sapporo Control, Air System 115, FL410 管制官:Air System 115, Sapporo Control, Roger
この時、航空機は降下開始点(TOD)までもう間もなくです。パイロットはアプローチ・ブリーフィングと降下チェックリストを完了しており、管制からも降下指示が入ります。パイロットに対し、現在の高度から15000フィートまで降下するよう要求する通信は以下の通りです: “Air System 115, Decent follow discretion, Maintain FL150” これは、 “Air System 115、15000フィートまで降下して維持せよ、タイミングは裁量で(パイロットの判断に任せる)” という意味です。
-
Eclipse 550ジェット機アドオン
最近、x-plane.orgで人気の無料航空機アドオン第1位である「Eclipse 550 Jet」アドオンをインストールしました。 試用してみて感触が良かったので、ここで紹介したいと思います。
インストール方法は簡単です。x-plane.orgにログインした後、上記リンクのダウンロードをクリックし、「Eclipse 550-v1-1」の圧縮ファイルを入手して、メインディレクトリの
/Aircraft/General Aviationの下に解凍します。その後、X-Planeを起動し、当該航空機を選択します。Eclipse 550の外観:

続いて試飛行を行いました。自動操縦と手動操縦でそれぞれ30分間飛行しましたが、操作の習得は非常に簡単で、マニュアルを見る必要もなく、 特定のボタン割り当などを特別に設定する必要もありませんでした。普段使用している小型のセスナやパイパーの設定と同じで、全く問題ありませんでした。 航空機の飛行は安定しており、コックピットの計器はデータを完全に表示しており、ディスプレイの設計は先進的、自動操縦装置のMCP(モード・コントロール・パネル)の機能も分かりやすく、 無料アドオンにしては、その品質の高さには敬服させられます。
下の写真はILS アプローチ中のスクリーンショットです。NAV2を使用して121.07MHzのILS信号を捕捉しています。GS(グライドスロープ)とLOC(ローカライザ)はほぼ中央に固定されており、様々な表示情報が確認でき、大型旅客機と変わらないことがわかります。
 滑走路の上空に入り、着地直前のフレア時のスクリーンショット。
滑走路の上空に入り、着地直前のフレア時のスクリーンショット。

この小型ジェット機は本当に興味深いです。私は普段、ジェット機を飛ばすことはほとんどありません。主に、各種自動操縦では手動で操縦する楽しさに欠けると感じていたからです。 しかし、完全にマニュアルモードで、離陸、上昇、巡航から降下、着陸までEclipse 550を体験してみたところ、悪くない感触でした。 今後は、もう少し遠距離フライトに多用することを検討してみようと思います。
完
-
旅客機のコックピット探検5.5 降下の開始
5.3節で標準計器到着進入(STAR)についてまとめた際、到着進入の開始ウェイポイントにおける位置と高度の情報をもとに、パイロットは予定到着時刻、燃料消費率、エンジン性能、風力・風向などの要素を考慮し、降下過程におけるエンジンの設定値と降下率を設定することができると述べました。
例えば、KAIHO到着進入プログラムは太平洋上にあるADDUMウェイポイントから始まり、最低経路高度は10000フィートです。巡航高度からADDUMまで降下するため、FMS(フライトマネジメントコンピュータ)の計算によると、航空機はADDUMの西側200キロメートルの地点から降下を開始する必要があります。
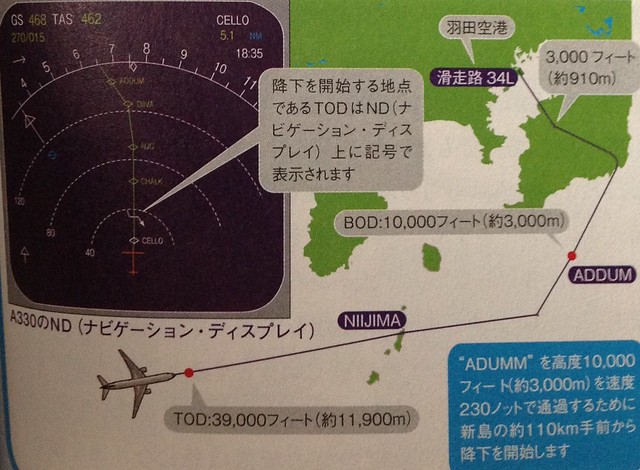 一般にこの地点を降下頂点またはTOD(T/Dと略記)と呼びます。ND(ナビゲーションディスプレイ)の地図モードでその表示を確認することができます。上の図のエアバス330では、矢印の付いた折れ線で示されており、その地点はCELLOとCHALKの Fixes(フィックス、定位点)の間に位置しています。なお、進入の開始点は降下底点またはBODと呼ばれます。
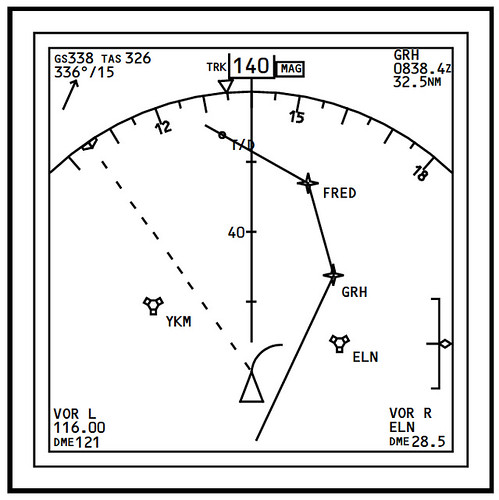
別の例として、ボーイング777のNDでは、T/Dの地点が直接示され、経路上の点で表されます。
一般にこの地点を降下頂点またはTOD(T/Dと略記)と呼びます。ND(ナビゲーションディスプレイ)の地図モードでその表示を確認することができます。上の図のエアバス330では、矢印の付いた折れ線で示されており、その地点はCELLOとCHALKの Fixes(フィックス、定位点)の間に位置しています。なお、進入の開始点は降下底点またはBODと呼ばれます。
別の例として、ボーイング777のNDでは、T/Dの地点が直接示され、経路上の点で表されます。
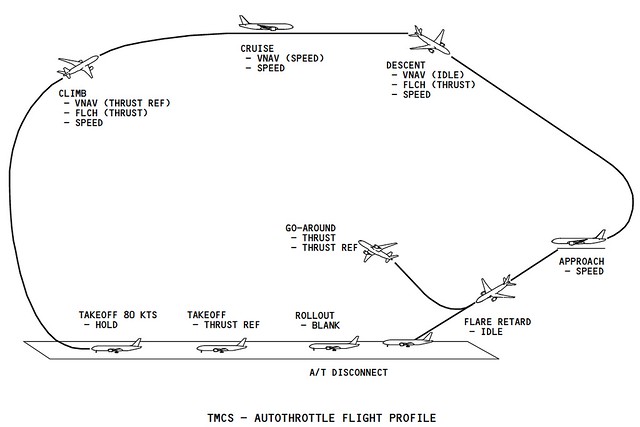
TODを過ぎると、航空機は自動的に高度の降下を開始します。フライト全体の概略図は以下の通りです。(この図は主に各飛行フェーズにおける自動スロットルの設定モードを説明するものですが、飛行プロセス全体を説明するのにも適しているため、ここで借用します。)
降下プロセスについて、必ず知っておくべき点は、航空機は昇降舵を下げて、つまり機首を下げて機体の高度を下げるわけではないということです。航空機はスロットル(油門)によって降下の勾配を制御します。
航空機が水平飛行から降下状態に入る際、スロットルを適度に絞ります。すると、航空機は速度を少し落とします。揚力と速度は正比例の関係にあるため、速度が減少すると揚力も減少し、結果として揚力が重力より小さくなるため、航空機は降下を始めます。降下時、飛行経路はもはや水平ではなく、ある角度で下向きに傾斜します。この時、翼の迎角は変化していませんが、航空機の進行方向が変わるため、真っ直ぐ前からやや下斜め前方へと変わります。その結果、翼の迎角が増え、揚力も増大します。そして、増加したこの迎角による揚力が、増加した重力の分を釣り合わせ、航空機に働くすべての外力が再び平衡し、等速降下の状態に入ります。
降下時は機首が下を向きます。この姿勢は推力の要求が非常に小さく、多くの場合、スロットルを完全にアイドル(閉じ)にして滑空することさえあります。飛行機に搭乗する際、降下の初期段階で機内が非常に静かになることに気づくはずです。降下中の航空機の姿勢を、下り坂を走る自動車に例えることができます。この時、アクセルを踏まなくても車は安定して下り、坂の勾配が大きければ速度も増し、勾配が小さければ速度は相対的に遅くなります。現代の航空機のフライトマネジメントコンピュータは、パイロットの要求に基づいて、スロットルと姿勢を適切に自動調整することができます。
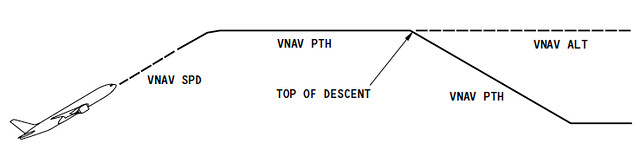
一般的に、パイロットは2種類の降下方式、つまり一定速度を維持するか一定勾配を維持するかを設定できます。これはFMCのピッチ設定に対応し、VNAV SPD(垂直ナビゲーション・速度モード)またはVNAV PTH(垂直ナビゲーション・経路モード)を採用することができます。
VNAV SPD降下では、通常、自動スロットルシステムはアイドル状態を維持し、自動飛行操縦システム(AFDS)はFMC上の目標速度を維持するように制御します。
VNAV PTH降下では、フライトマネジメントコンピュータ(FMC)は通常、航空機が3度の降下勾配を維持するように制御し、TODとBODの間の速度はコンピュータによって自動制御されます。例えば、航空機が風の影響を受けて3度の勾配より上に逸れた場合、FMCは速度を少し増やし、航空機が元の勾配を維持するようにします。
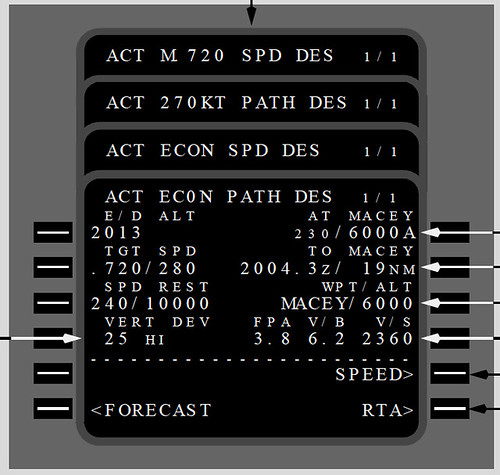 上の図はボーイング737のCDU画面です。同じVNAV PTH状態で、降下開始時に巡航中の「ACT ECON CRZ」から「ACT ECON PATH DES」モードに自動的に変わります。2Lには現在の速度値としてマッハ0.72、280ノットと表示され、3Lには速度制限が表示されています。これは、業界規則で10000フィート以下での飛行速度制限が250ノットと定められているため、この制限を超えないように、あえて速度制限を240ノットに設定しているからです。
上の図はボーイング737のCDU画面です。同じVNAV PTH状態で、降下開始時に巡航中の「ACT ECON CRZ」から「ACT ECON PATH DES」モードに自動的に変わります。2Lには現在の速度値としてマッハ0.72、280ノットと表示され、3Lには速度制限が表示されています。これは、業界規則で10000フィート以下での飛行速度制限が250ノットと定められているため、この制限を超えないように、あえて速度制限を240ノットに設定しているからです。
なぜ一般に3度の勾配で降下するのでしょうか? それは、3度の場合、高度と降下距離の関係を暗算で計算するのに最も適しているからです。以下の近似公式を用いると: 降下に必要な距離(海里)=飛行高度(フィート)/1000*3 簡単に估算することができます。 例えば、巡航高度33000フィートから地上まで降着する場合、飛行高度/1000*3により、99海里(約190キロメートル)という結果が得られます。したがって、航空機が33000フィート、つまり高度10キロメートルから降下してくるためには、少なくとも到着空港の外190キロメートルの地点から降下を開始する必要があります。
-
旅客機操縦探秘5.4 計器着飛行図
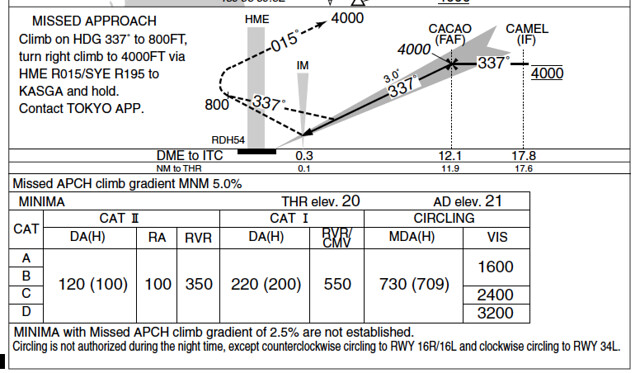
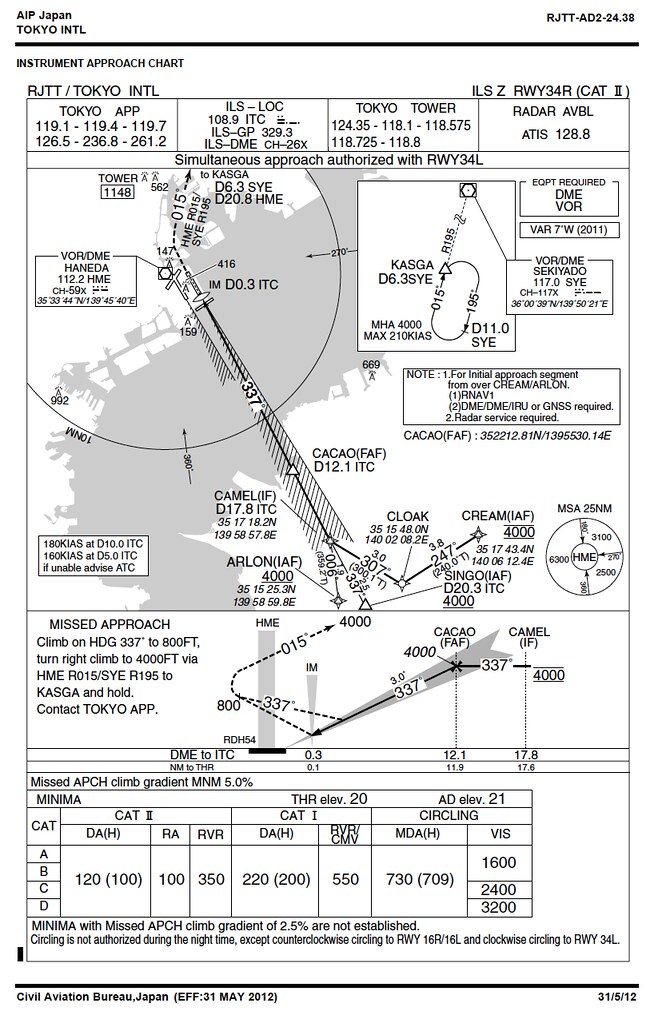
計器進入図を用いて、計器進入の手順を簡単にまとめてみましょう。例として、東京国際空港の ILS Z RWY34R (CAT II類) 手順を挙げます。
アプローチ (Approach) とは、着陸に向かって航空機が降下し、滑走路に正対して飛行する過程のことです。アプローチ段階では、航空機の高度を調整し、滑走路に正対させ、地上の障害物を回避する必要があります。パイロットは高度な集中力を必要とし、正確な操作が求められるため、アプローチには厳格な基準と手順が定められています。上記の “ILS Z RWY34R (CAT II類)” は、東京国際空港の34R滑走路へ進入する際の(最初の、Zで命名された手順。2番目はY、3番目はXとなる)計器進入プログラムの名称を指します。
空港の最終進入コースにおいて垂直方向の降下誘導(グライドパス)が提供されるかどうかによって、進入方式は精密進入と非精密進入の2つの大別に分類されます。精密進入の誘導に使用される航法施設には、計器着陸システム ILS (Instrument Landing System、通称「盲降」システム)、マイクロ波着陸システム MLS、および精密進入レーダー PAR があります。一方、非精密進入设备には VOR、NDB、LOC、GPS などが含まれます。ILS は知名度の高い自動着陸システムの一つですので、本節で紹介する ILS Zulu RWY34R (CAT II類) 進入図では、この精密進入 ILS プログラムを例に解説します。
進入段階は、通常、初期進入(初期進入定點 IAF から中間進入定点 IF まで。到着から進入への移行であり、航法設備に従って機首を滑走路方向へ向ける)、中間進入(中間進入定点 IF から最終進入定点 FAF まで。航跡を滑走路方向に保ち、水平飛行を行い、速度や姿勢を調整して最終進入へ円滑に移行する)、最終進入(最終進入定点 FAF から着陸復行点まで。着陸航跡に沿って降下し、滑走路中心線に正対し、決断高度まで降下する)、そして着陸復行のいくつかの段階から成ります。
計器進入図は計器進入プログラムの視覚的な図表表示であり、通報欄、平面図、断面図、着陸最低気象条件などの情報が含まれています。
まず最上部の通報欄を見てみましょう。ここにはパイロットが必要とする通信周波数が記載されています。
最初の項目である TOKYO APP(東京アプローチ管制)の周波数は合計6つあり、119.1、119.4、119.7、126.5、236.8、261.2 MHz です。具体的にどの周波数を使用するかは、到着時の管制の指示(ハンドオフ)によります。
2番目の項目は航法設備の周波数情報です。計器着陸システム ILS-LOC 局の周波数は 108.9 MHz です。続く ITC は34R滑走路の識別符号であり、その後ろにモールス符号が示されています。機上の航法設備で電波を捕捉した際、パイロットはこのモールス符号を聴取し、チューニング周波数が正しいかを確認する必要があります。 LOC(ローカライザ、Localizer の略)は ILS のサブシステムであり、航空機に水平方向の誘導を提供して、滑走路中心線の延長上を正しく飛行できるようにします。ILS-LOC 局の周波数は 108.9 MHz です。 GP(グライドパス、Glide Path の略。グライドスロープとも呼ばれる)は ILS のもう一つのサブシステムであり、垂直方向の誘導を提供して、航空機が正しい角度で降下できるようにします。ILS-GP の周波数は 329.3 MHz です。 また、ローカライザとグライドパスの<a href=“http://zh.wikipedia.org/ja-cn/仪表着陆系统#.E9.A2.91.E7.8E.87.E5.88.97.E8.A1.A8"搬送波周波数はペアになっており、一度の選択で両方の受信機をチューニングできるようになっています。 一番下の CH-26x は ILS-DME 測距儀のコードです。測距儀も空港内に設置された装置であり、パイロットに対して海里単位での滑走路までの直線距離(斜距)を提供します。