フライトシミュレーター愛好家のノート
-
X-Plane 10 グローバル・デジタルダウンロード版
X-Plane 10ではデジタルダウンロード版が登場しました。つまり、DVDを購入する必要がなく、オンラインで購入して直接ダウンロードするだけで済みます。
公式の説明によると、購入後に24桁のプロダクトキーが発行され、それを使用してX-Planeをダウンロードおよび実行できるため、起動時にDVDドライブにディスク1を入れておく必要がなくなります。
 完
完
-
オーバーラン防止システムROPS
エアバスの滑走路オーバーラン防止システムのニュースを見た。 ROPSはA330シリーズに適用され、先日欧州航空安全局(EASA)の耐空証明を取得した。 エアバスROPSがA330で認証、全機種をカバー A330のオーバーラン防止装置、EASAが認可
ROPSの資料を引用すると、上記中国民航網の説明によると、 ROPSは本質的に警報システムであり、着陸時のパイロットの状況認識を向上させ、 滑走路オーバーランのリスクを低減し、必要な場合はシステム自体が能動的な保護を提供する。 今後、エアバスの全機種は出荷時にROPSを装着可能になり、 就航中の全エアバス機も改造によりROPSの搭載が可能となる。
滑走路逸脱とは、機体が横方向または滑走路端からはみ出すことであり、 民間航空事故の主要な原因の1つとして長く知られている。
特許技術を持つエアバスの滑走路オーバーラン防止システムは、EASA、FAA、CAACの耐空証明を取得済みで、 着陸時の最小空中滑走距離と地上制動距離を計算し、 計算データを滑走路の実情とリアルタイムで照合する。 システムのデータベースは、天候、滑走路状態、地形に加え、 機体重量やコンフィギュレーションなど多岐にわたる。
コンピュータ解析により、ROPSは状況に応じて緊急音声通報や警報をクルーに提示し、 ゴーアウトの意思決定を支援するか、 着陸中の停止操作(MAX BRAKINGなど)を迅速に実施できるよう支援する。
エアバスの資料をもう一つ見る。 Runway Overrun Prevention System ROPS = ROW + ROP ROW: Runway Overrun Warning(滑走路オーバーラン警報) ROP: Runway Overrun Protection(滑走路オーバーラン保護)
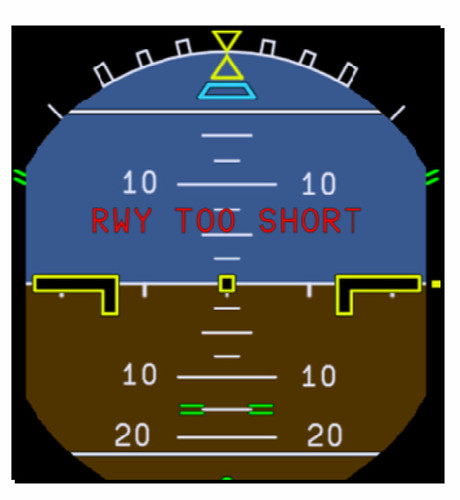
例えば、滑走路が濡れている場合、オーバーラン警報距離が残存滑走路長を超え、 高度400フィート以下であれば、ROPSはPFDに琥珀色の警告を表示し、 該当警告は9秒間点滅する。
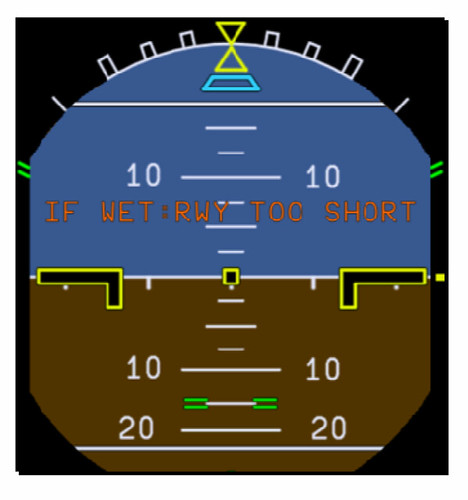
乾燥滑走路の場合、オーバーラン警報距離が残存滑走路長を超え、 高度400フィート以下であれば、ROPSはPFDに9秒間の赤色点滅警報を表示し、 高度200フィート以下では緊急音声"RWY TOO SHORT"を発する。
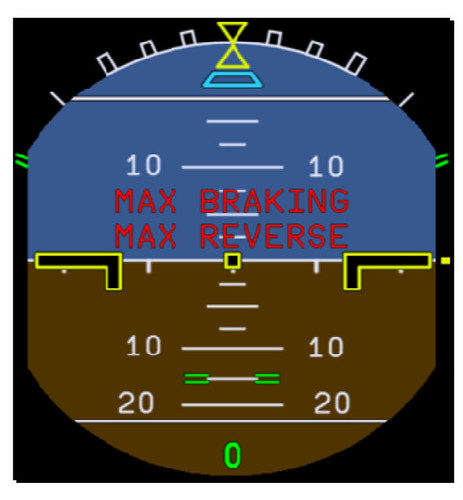
オーバーラン保護(ROP)の距離が残存滑走路長を超える場合、 PFDに赤色警報が表示され、 “BRAEK… MAX BRAKING"および"SET MAX REVERS"の音声を連続して発し、 パイロットに最大ブレーキと最大逆推力の使用を促す。 速度80ノット以下でも滑走路長が不足する場合は、 引き続き"KEEP MAX REVERSE"の音声を発し、 最大逆推力を維持するよう注意喚起する。
完
-
北京の視認進入程序
AIPの更新情報を読むのも一種の娯楽であり、 北京国際空港ZBAAが8月1日より目視進入方式(Visual approach procedure)を運用開始し、 9月3日の24時をもって終了するのを見つけた。何のイベントのためのものかは不明だ。 とにかく新しい学習ポイントなので、簡単なメモを書く。
図を見ると、目視進入で使用されるRWY01、その条件は PAPIが正常に稼働していること ILSが稼働していること レーダーが正常に稼働していること 懐柔VOR/DME(HUR)、官庄VOR(PEK)、北京/首都DME(INJ)が正常に稼働していること 雲底高900メートル、視程10キロメートル以上
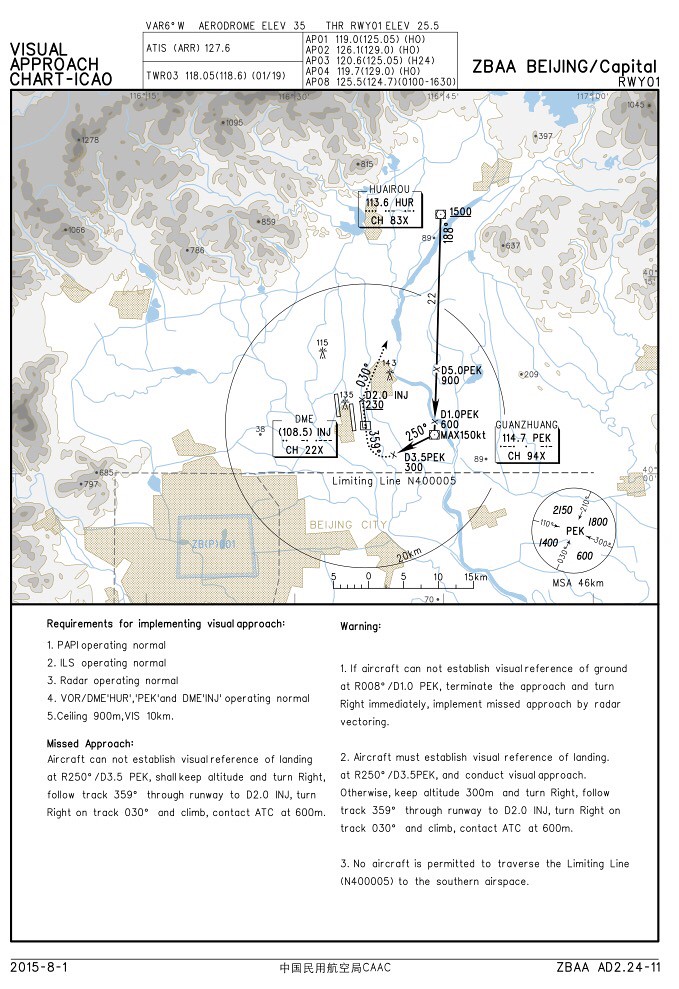 ルートは懐柔VORから開始、高度1500メートル、針路188度、
官庄VOR 5キロメートル 高度900メートル、
官庄VOR 1キロメートル 高度600メートル、対気速度150ノット以下 地面が見えない場合は直ちに右に旋回し、Missed Approachを実行
官庄VORで250度の針路に切替
官庄VOR 3.5キロメートル地点 高度300メートル この時点で着陸のための視覚的目標物がまだ見えない場合、Missed Approachを実行
ルートは懐柔VORから開始、高度1500メートル、針路188度、
官庄VOR 5キロメートル 高度900メートル、
官庄VOR 1キロメートル 高度600メートル、対気速度150ノット以下 地面が見えない場合は直ちに右に旋回し、Missed Approachを実行
官庄VORで250度の針路に切替
官庄VOR 3.5キロメートル地点 高度300メートル この時点で着陸のための視覚的目標物がまだ見えない場合、Missed Approachを実行
復飛の手順は、高度300メートルを維持して右に旋回し、 滑走路方向の359度でINJ 2キロメートルまで飛行した後、右に針路30度で旋回し上昇、 高度600メートルでATCと通信。
以上
その他の参考資料
<a href=http://www.caacnews.com.cn/newsshow.aspx?idnews=259217>国内初実施 首都空港における多滑走路目視進入方式 中国民用航空総局 目視間隔と進入の実施暫定規定 [議論]多滑走路独立並行運行時におけるファイナルアプローチ間隔維持に関する疑問
-
日本の航空法におけるドローンの規定
今週、日本政府は航空法を改正し、ドローンに関する規定を追加しました。 内容はわずか数百字程度と少ないですが、 ドローンのために新たに「第九章 無人航空機」という章が設けられたことからも、この新事物に対する意識の高さがうかがえます。
以下、その内容を簡単に紹介します。
一つ目は飛行空域に関する規定です。以下の条件を除き、関係部署への申請が必要となります。
- 飛行時間は日の出から日没までであること
- 常にドローンおよび周囲の状況を目視監視すること
- 人や建築物などから一定の距離を保つこと
- 祝日、公開イベント、展示会など人が集まる場所に入ってはならない
- 引火性・爆発性のあるもの、またはその他の人や地上の建築物等を傷つけるおそれのある物品を搭載してはならない
- 人や地上の建築物等を傷つけるおそれのある物品を投下してはならない
また、これらの規定に違反した者には、50万円以下の罰金が科されます。
航空法は航空分野の基本法にあたるため、 例えば上記の第3点には具体的な距離の規定が含まれていません。 そのため、今後はより詳細な条文が制定されるものと見られます。
完
中国大陸のドローン規定に関する参考情報 http://www.guokr.com/blog/744056/ http://proarticle.ccaonline.cn/20150115/3298.html
-
X-PlaneでのSaitek Pro Flight BIPの設定方法
サイテック(Saitek)のBIP(Pro Flight Backlit Information Panel)は、バックライト付きの情報パネルを使用して、エンジン、燃料、電源、オートパイロットなど、50以上の情報コマンドや計器の状態をユーザーに提供します。ユーザーは情報パネルをカスタマイズして航空機に関する情報を表示させることができ、また個人の好みに応じて、異なるコマンドに対して異なる色(赤、緑、琥珀色)を設定することができます。

筆者の手元にはBIPがないのですが、台湾のCharles Washington氏が貴重な設定ドキュメントを提供してくださいました。 それをここにまとめましたので、皆様の参考になれば幸いです。Charles Washington氏の原稿はこちらにあります。
まず、2つのアドオン(プラグイン)をダウンロードします。1つは以前紹介したXsaitekpanelsです。org公式サイトから圧縮ファイルをダウンロードして解凍し、Xsaitekpanels_ 2_42 の中にあるXsaitekpanelsディレクトリをX-Planeの’Resources’の’plugins’ディレクトリの下にコピーします。 Xsaitekpanelsの下に3つのファイルがあることが確認できます。 D2B.config.txt D2B.config2.txt D2B.config3.txt それぞれのファイルは1つのBIPデバイスに対応しています。もし1つしか持っていない場合は、D2B.config.txtが使用されます。
D2B.config.txtの内容を見てみましょう。例えば以下の通りです。
This will turn on the top row first indicator red if the first geterator is off #SET BIP A 0 R FROM ARRAY sim/cockpit2/annunciators/generator_off 0 RANGE 1 TO 1 This will turn on the top row second indicator red if the voltage is low #SET BIP A 1 R FROM DATAREF sim/cockpit/warnings/annunciators/low_voltage RANGE 1 TO 1 This will turn on the top row third indicator red if fuel is low #SET BIP A 2 R FROM DATAREF sim/cockpit2/annunciators/fuel_quantity RANGE 1 TO 1 This will turn on the top row fourth indicator red if the parking brake is on #SET BIP A 3 R FROM DATAREF sim/cockpit2/controls/parking_brake_ratio RANGE 1 TO 1 This will turn on the middle row first indicator if oil pressure is low #SET BIP B 0 R FROM ARRAY sim/cockpit2/annunciators/oil_pressure_low 0 RANGE 1 TO 1 This will turn on the middle row second indicator is oil tempature in high #SET BIP B 1 R FROM ARRAY sim/cockpit2/annunciators/oil_temperature_high 0 RANGE 1 TO 1 This will turn on the middle row third indicator if the vacuum is low #SET BIP B 2 R FROM DATAREF sim/cockpit2/annunciators/low_vacuum RANGE 1 TO 1 This will turn on the middle row fourth indicator if the auto pilot is turned off #SET BIP B 3 R FROM DATAREF sim/cockpit2/annunciators/autopilot_disconnect RANGE 1 TO 1
実は、この文法は比較的的理解しやすいものです。 つまり、#SETコマンドを使用してBIPの各表示セルに値を割り当てます。例えば、 #SET BIP A 1 R FROM DATAREF sim/cockpit/warnings/annunciators/low_voltage RANGE 1 TO 1 これは、BIPの"A 1"番、つまり上から1列目の2つ目を赤色(R)に設定し、 その数値はシステムの電源電圧が低下しているかどうかに基づき、その数値が1の時にそのセルを点灯させます。
-
カップルド・アプローチ
1 これは、特定の航空機がグライドスロープとローカライザを自動的に追従できるかどうかを指す際によく使われる言葉です。 ヨーロッパの汎用航空でもILSやMLSは頻繁に使用されますが、多くの旧式の航空機には自動的な追従機能が装備されていない場合があります。
2 機上の航法装置から位置情報や操縦コマンドを受信しながら、航空機の自動操縦によって実行される計器進入のことです。
一般的に、カップリングされた非精密進入は、最低降下高度より50フィート以下の高度では手動飛行に切り替える必要があり、カップリングされた精密進入は、地上高度50フィート(AGL)以下では手動で飛行しなければなりません。
カップリング進入と自動着陸は、VFR(有視界飛行方式)とIFR(計器飛行方式)で実施されます。航空会社では、RVR(滑走路視距離)が約4000フィート未満の気象条件下において、乗務員がカップリング進入や自動着陸(認証されている場合)を行うことを求めるのが一般的です。
3 航空用語において、「カップリング進入」とは、進入フェーズで航空機の自動操縦を利用して航行し、進入の最低高度まで、あるいは場合によっては滑走路自体まで誘導する進入方法のことを指します。
出典 1 美女商業飛行員
2 http://encyclopedia2.thefreedictionary.com/coupled+approach
-
ILS信号の干渉
台湾の飛行自発報告システムの飛安簡訊を読んでいて、信号干渉がILSに及ぼす影響によって、自動着陸した機体が着地時に滑走路から逸脱する事例を見つけました。 以前から<a href="/blog/ja/2014/09/-liuzhimin"先輩にこういった話を聞いてはいましたが、ここまで深刻になるとは思っていなかったので、ここに写し取りました。
------原文開始------- ある便が空承の許可を得て、桃園空港の滑走路23RでILS(計器着陸装置)による進入を行っていた。乗員は天候が良好な状態で自動着陸を使用していたが、事前に塔に通知していなかった。進入過程において空港から約4海里の地点で、塔は同一滑走路から離陸する別のA320型機に離陸許可を出した。これにより、離陸機が滑走路の計器着陸システムの感応領域を通過した際、ナビゲーション信号に干渉が生じた。
事故機は引き起こし段階に近づくにつれて航跡が右へ逸脱し始め、滑走路中心線の右側に接地した。乗員は着陸過程で機体を適切に制御できず、警戒を怠っていた。自動操縦に予期せぬ作動が生じた際、速やかに自動操縦を解除して手動操縦に切り替えるべきところ、そのままの状態であったため、着陸後に機体が滑走路を逸脱することとなった。
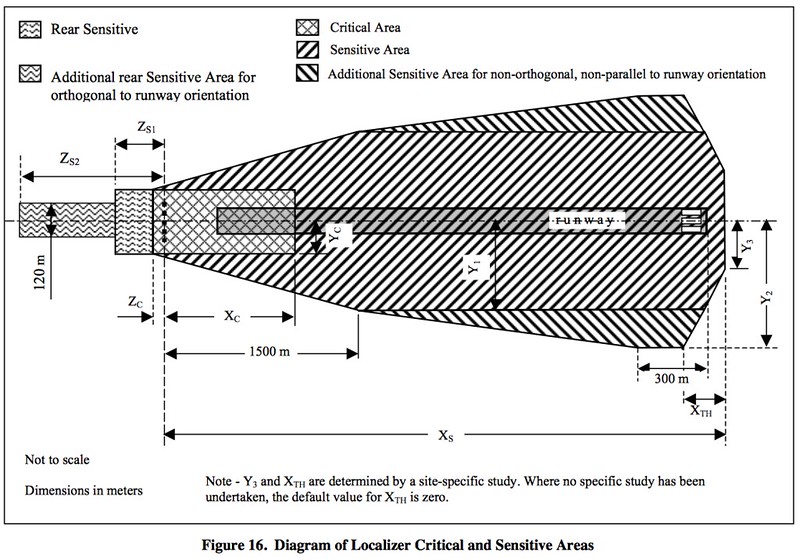
米国連邦航空局(FAA)が発行する航空情報マニュアル(Aeronautical Information Manual, AIM)の第1-1-9節、ILSの項K「ILS信号の干渉」を参照すると、ILSのローカライザーおよびグライドスロープ信号は、地上の車両や航空機によって干渉を受けることがある。そのため、空港ではILSのローカライザーおよびグライドスロープ送信所の近くに、ILS精密進入クリティカルエリア(ILS critical areas)が設定されている。雲底高が800フィート未満、および/または視程が2マイル未満の場合、到着機がILS最終進入点と空港の間にある際、車両や航空機がILS精密進入クリティカルエリアに進入することは許可されていない。雲底高が800フィート以上、および/または視程が2マイル以上の場合、ILS精密進入クリティカルエリアは保護されない。この状況下で自動操縦による着陸またはカップルド・アプローチ(coupled approach)を行う場合、乗員は塔へ通報し、ILS精密進入クリティカルエリアが保護されるようにしなければならない。
当該機の乗員は今回の進入において、自動操縦による着陸を実施することを塔に通知しなかった。そのため、塔はクリティカルエリア内の航空機を管制せず、事故機に対してローカライザー信号が保護されていない旨も通知しなかった。これにより、同機が自動操縦で着陸した際、ローカライザー信号が干渉を受け、その正常な機能に影響が及んだ。同社の運航マニュアルの関連内容を検視したところ、天候良好時に自動着陸を実施する際、空承へ通報すべき規定は存在しなかった。
同機は着陸の約10秒前、ローカライザーが離陸機による影響で干渉を受け、機体が滑走路中心線の左側にある表示を始めた。当時、自動操縦は「Localizer」モードに設定されており、その後「Rollout」モードに移行する。自動操縦はローカライザー信号に従って機体を操縦するため、ローカライザーとの偏差をゼロにするために機体は右に旋回する。着陸約5秒前、乗員は操縦輪とラダーペダルを使用し、自動操縦を強制的に操作(override、自動制御を一時的に無効化し手動操作に切替)して機体の進行方向を左に修正しようとした。これは、乗員が滑走路中心線上に機体を保とうとしたことを示している。しかし、乗員がこの手動操作を解除すると、自動操縦は直ちに右満舵操作を行い、干渉を受けたローカライザー信号に追従したため、機体の主輪はすべて滑走路中心線の右側に接地した。着陸後約2秒で、右翼の主輪が滑走路の側線を逸脱した。
ボーイングのフライト・オペレーションズ・レビュー(Flight Operations Review)では、自動操縦を解除する代わりに、自動操縦モードへの強制的な操作(override)を行うことは推奨されていない。なぜなら、強制的な操作には非常に大きな力が必要であり、長時間続けることが困難だからである。
------原文終了-------
メモ 1 ILSクリティカルエリアはどこにある? インターネット上でこの図を見つけました。ローカライザーアンテナの近くにある斜線の影付き部分がCritical Areaであることがわかります。
2 自動操縦をオーバーライド(override)する際、十分な力がなければ、パイロットは自動操縦に勝てないということか。。
3 カップルド・アプローチ(coupled approach)とは何ですか?
完
-
复兴航空GE235フライト事故事実資料レポート
昨日、台湾飛航安全調査委員会は復興航空GE235便事故事実資料報告書(英語版)と記者会見ブリーフィング資料(中国語版)を公開した。<a href="/blog/ja/2015/02/be235"以前のまとめと比べて、新しい報告書は非常に詳細なデータを含んでいる。しかし英語で書かれているため、すべてを読むことはせず、興味のある部分を選んで眺めてみた。
まず中国語のブリーフィング資料を見てみよう。致命的な箇所はここだ:
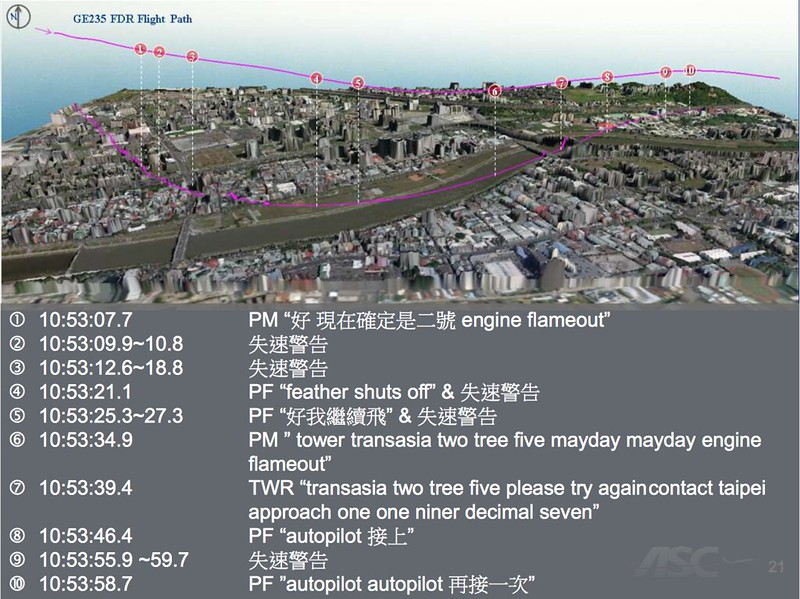
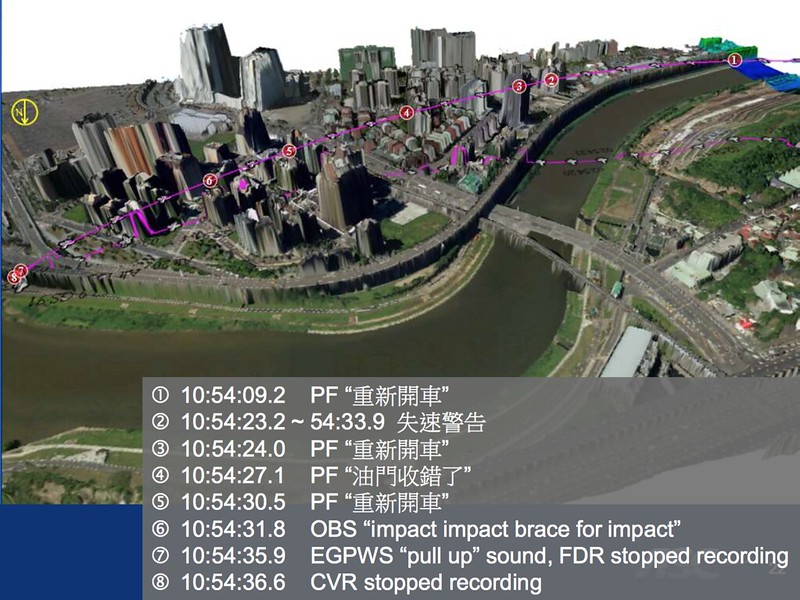
1052:38時 該機が1,200フィートを通過時、コックピットで警報音が鳴動; Engine and Warning Display (EWD) に「ENG2 FLAME OUT AT TAKE OFF」の手順が表示 1052:43時 PF: 「1号エンジンを絞る」 PM: 「待って、クロスチェック」 この時、ENG1スロットル位置記録が75度から66度まで収束 1053:00時 PM: 「OK、エンジンフレームアウトチェック」 続けて: 「チェック、アップトリムあり、オートフェザーあり」 1053:06時 PF: 「1号を絞る」 その後、ENG1スロットルは49度まで収束 同時にPM: 「OK、今、2号エンジンのフレームアウトと確定」 1053:09時 PF: 「了解」 ENG1スロットルは49度の位置に維持されたまま
2号エンジンに対する警報に対し、PFはすぐにオートパイロットを切り、1号エンジンのスロットルを絞り始めた。PMが2号エンジンと言ったにもかかわらず、PFはそれに気づかなかったようで、その後もスロットルを絞り続けた。さらにPMもこのミスに気づかず、監視する責任を果たさなかった。その結果、機体は墜落し、多くの犠牲者が出るという大きな惨事となった。
なぜPFは警報を聞いてすぐにオートパイロットを切ったのか。報告書で提供されたエンジン不作動の手順を見てみた。
 ENG1(2) FLAME OUT IN FLIGHTの項目には2つの手順しかない。1つは影響側のスロットルPL(Power Lever)をFI(Flight Idle)まで戻すこと、そして高速タービン回転数NHが30%以下になった場合、影響側のCL(Condition Lever)をFTR(feather) THEN FUEL SO(Shutoff)まで戻す、つまりフェザー化と燃料遮断だ。したがって、PFの操作手順自体は正しかったが、対象を間違えてしまったのだ。
ENG1(2) FLAME OUT IN FLIGHTの項目には2つの手順しかない。1つは影響側のスロットルPL(Power Lever)をFI(Flight Idle)まで戻すこと、そして高速タービン回転数NHが30%以下になった場合、影響側のCL(Condition Lever)をFTR(feather) THEN FUEL SO(Shutoff)まで戻す、つまりフェザー化と燃料遮断だ。したがって、PFの操作手順自体は正しかったが、対象を間違えてしまったのだ。記者会見の資料によると、ATPCS(自動離昇動力制御システム)は、エンジン故障を検知すると、正常側のエンジン出力を自動的に増加させ、故障したエンジンを自動的にフェザー化する機能を持っている。
事実資料報告書を改めて見ると、PFのミスの原因に興味があったため、彼の経歴部分を読んでみた。復興航空のパイロット訓練に問題があったのではないかと感じられる箇所がある。例えばこの部分だ:
He then completed line training from 2 July to 10 August 2014. During the process, the comments addressed by the instructors were summarized as follows:  Prone to be nervous and may make oral errors during the engine start procedure; Insufficient knowledge leading to hesitations in "Both EEC Failure" and "Engine Failure after V1" situation during the oral test; Lack of confidence and being nervous while answering the Smoke procedure during the oral test; Incompletion in certain procedure check and execution; Prone to be hesitated when facing situation that requires making decisions; Flight planning should be improved.
2014年7月から8月の訓練期間中、教官からのコメントは以下の通りだった: 緊張傾向があり、エンジン始動手順中に口頭でのミスを犯すことがある; 知識不足により、EEC(電子式エンジン制御)二重故障やV1後のエンジン故障を想定した口頭試験で躊躇が見られた; 自信が欠如しており、コックピットでの煙対応手順の口頭試験中に緊張していた; 特定の手順チェックと実行が不完全だった; 決断を必要とする場面で躊躇する傾向があった; フライトプランの能力を向上させる必要がある。
-
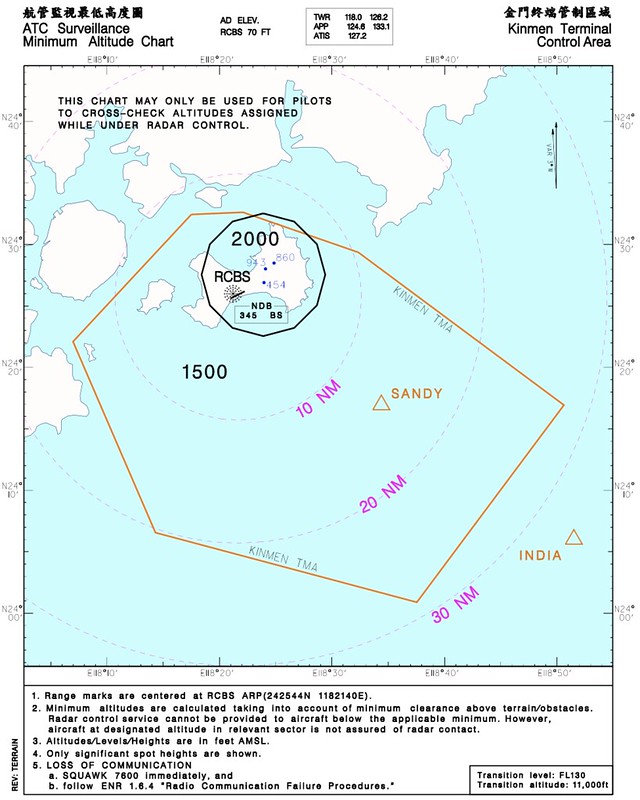
台湾の航空交通管制監視最低高度図
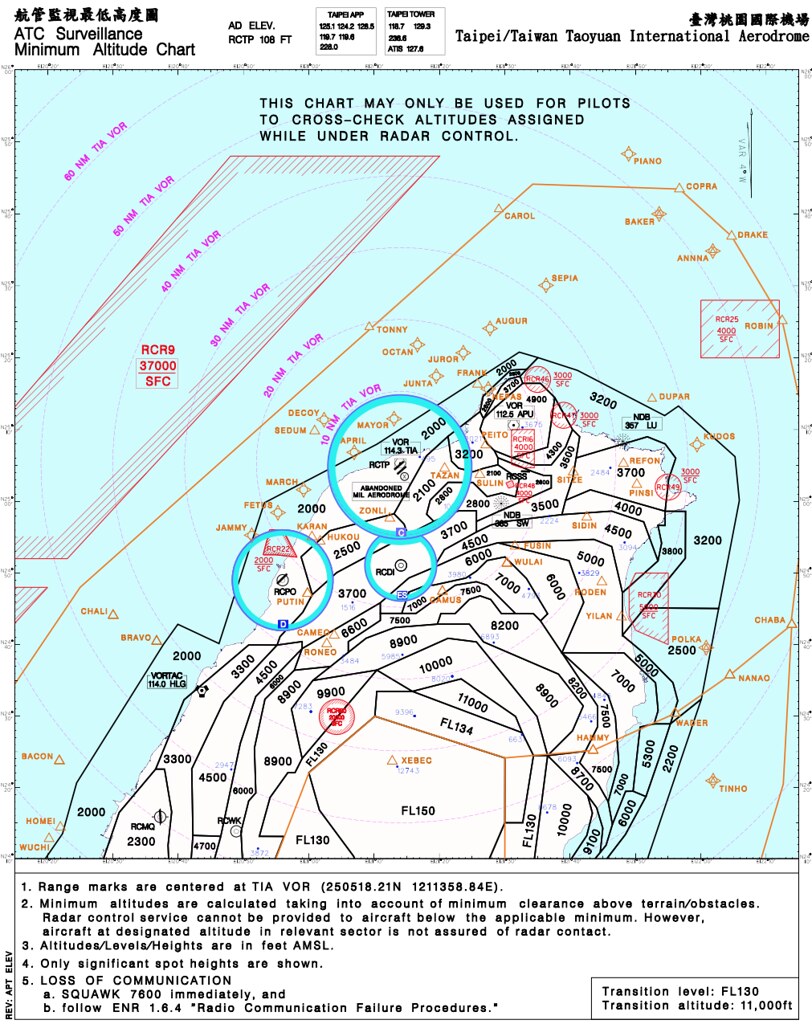
全く知りませんでした。今日、台湾のAIP電子式飛航指南を見てみたら、多くの空港図でATC Surveillance Minimum Altitude Chartが提供されており、「航管監視最低高度図」と翻訳されているのを見つけました。勉強になりました。
例えば桃園空港
高雄空港
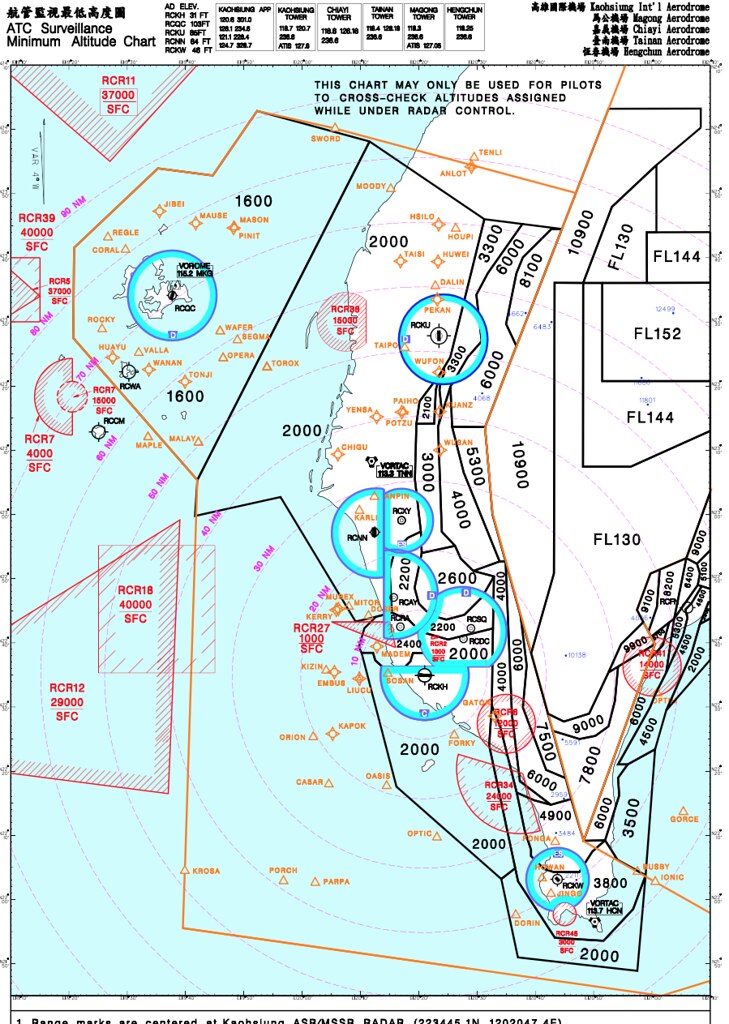
松山空港
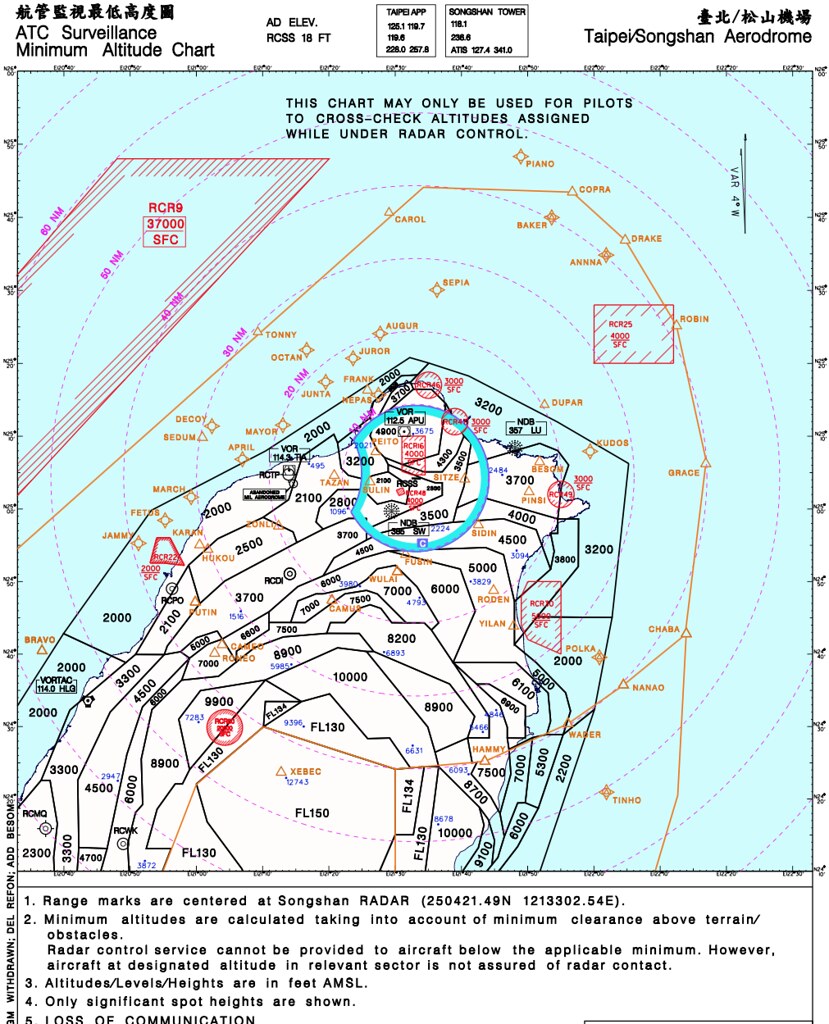
この3つの航空図は、びっしりと扇区(セクター)が記入されていて、見るのがかなり大変そうです。これほど細かく分けられて、パイロットはそんなに時間があって、監視しきれるものなのでしょうか?本当に少し困惑しています。
一方、金門の図を見ると、これは逆にシンプルすぎますよね。わざわざこれを独立させて1枚の図にするのは、なんだかもったいないような気がします。。
-
いくつかの航空路更新
中国本土 <a href=/x-plane10/view.php?file=doc/IFRMFCNr1507.pdf>中国本土発国際航空路 International Flight Routes from Mainland of China Nr1507 <a href=/x-plane10/view.php?file=doc/IFRTMCNr1507.pdf>中国本土行き国際航空路 International Flight Routes to Mainland of China Nr1507 <a href=/x-plane10/view.php?file=doc/OFRNr1507.pdf>経由国際航空路 Overflying Flight Routes Nr1507 <a href=/x-plane10/view.php?file=doc/RFRNr1507.pdf>香港・マカオ・台湾地域航空路 Regional Flight Routes Nr1507
日本 <a href=/view.php?file=doc/JP-eAIC-2015-032-en-JP.pdf>飛行計画経路 20 AUG 2015 飛行計画経路 30 APR 2015
アメリカ合衆国 NFDC Preferred Routes Database Query NFDC Preferred Routes Database
-
日本航空安全報告システムASRSレポートを読む
以前、中国大陸と台湾の<a href="/blog/ja/2014/06/asrs"航空安全報告システム(ASRS)を紹介しましたが、最近日本のASRSも始まりました。そのシステム名は航空安全自発報告制度(Voluntary Information Contributory to Enhancement of the Safety)、略称VOICESです。その登録システムは異なるURLを使用しており、こちらにあります。
現在、VOICESは2つの情報フィードバックを発表しており、季刊誌のようにウェブサイト内で公開されています。つまり昨年12月のNo.2014-001号と、今年3月のNo.2014-002号です。読んでみると、ここにある情報は問題を指摘しているものだけでなく、航空従事者による反省や情報共有も少なからず含まれており、これはもしかすると国民性に関係しているのかもしれません。
以下に、いくつかピックアップして見てみましょう。
-
パイロットからの報告:仙台空港へのアプローチ中、高度1500フィートで突然多くの風船が現れました。付近で結婚式が行われていたようです。今回は飛行に大きな影響はありませんでしたが、今後は注意が必要です。
-
パイロットからの報告:平行滑走路へのアプローチ中、アプローチ管制からの指示が出るのが比較的遅く、かつ通信が長かったため、ILSローカライザーへの旋回操作に支障を来しました。その結果、タワーとの交信時にパイロットはオーバーシュート(overshoot)したと告げられました。
-
タクシーウェイWから羽田空港のスポット5に曲がろうとした際、スポット5はタクシーウェイWとHの角にあるため、結果としてH上に先行する機があり、曲がれる空間が非常に狭く、衝突しかけました。今後はATCに注意してほしいです。
-
コックピットに入り、ラダーペダルの位置を調節したところ、中に置き忘れられた飲み物のペットボトルが落ちてきました!
-
成田空港へのアプローチ時、ATISに基づいて立てた計画が次々と変化しました。最初はILS、次にSTARのウェイポイント、さらに滑走路も変更になり、その結果パイロットはFMSを操作し続け、計器や外部監視に割く時間が奪われました。
-
小型機で10000フィート以上の高度を飛行中、パイロットが乗客に対し事前に低酸素症の症状を説明していませんでした。その結果、一名の乗客が低酸素症による歯痛を訴えました。
-
一部の外国人乗客が、自身で持ち込んだ延長用シートベルトを使用して搭乗しており、これは禁止すべき行為です。
-
離陸から40分後、客室乗務員が3人掛け席の乗客が大人2人で幼児を抱いているのを発見しました。おそらく通路側の乗客が、本来別の席位に割り当てられていた子供を抱き寄せたものと思われます。3人掛け席には酸素マスクが4つしかないため、もし緊急事態が発生した場合、全員が酸素を使用できる保証がありません。そのため、子供を元の席位に戻させました。
-
離陸後、非常に強い前線の乱気流に遭遇しました。VNAV PATHモードで上昇しましたが、速度はますます低下し、ピッチは最大15度、垂直速度は最大8000ft/minに達しました。SPDを280に設定しましたが、速度は250以下に落ち込みました。その後VSモードに切り替え、1000ft/minに設定しましたが、速度はさらに減少しました。そこでオートパイロットを解除し、手動でピッチを押して速度を正常値まで回復させました。
-
空港からのクリアランスが遅れ、その後のドアクローズの際にもトーイングトラック(Tow Truck)が手配されていませんでした。結果、プッシュバックをリクエストした時もまだトラックを待つ状態でした。慌ただしく出発した後で、PREFLIGHT Check(プレフライト・チェック)の実行を忘れていたことに気づきました。
-
直行ウェイポイント(Direct-to waypoint)の入力を間違えてしまいましたが、幸いPM(モニタリングパイロット)が注意喚起してくれたため、航空路からの逸脱を防ぐことができました。
-
降下中にFLCHモードを使用し、MCPのIASウィンドウで速度を270に設定しました。その後VNAVを使用して250まで減速しようとMCPのMACH Selectorを押しましたが、その結果を確認しませんでした。その結果、FLCH中に押した後ライトは消灯しなかったものの、パイロットは無意識のうちにVNAV内の速度値に設定されたと勘違いしました。後になって高度8500フィートで過速度に気づき、V/Sモードを使用して降下率を下げ、スピードブレーキを開けて速度を240まで落としました。
-
離陸後、前方の航空機の後方乱気流に遭遇し、オーバーバンク警告が発生、AFDS(Autopilot Flight Direction System)のモードがCWS(Control Wheel Steering)ロールモードに変わりました。その後ロールレートが回復したため、オートパイロットを切り、HDG(針路)を再設定しました。
-
天候と交通量が多かったため、Speed Intervention(スピード・インターベンション)の設定を接触(解除?)するのを忘れ、その結果10000フィートから8000フィートの区間で速度制限を超過しました。
-
上海浦東空港で搭乗橋に駐機する際、VDGS(Visual Docking Guidance System)を使用しましたが、機首タイヤが地上の青色停止位置枠から出てしまったため、やむをえずトーイングトラックを使用して後ろ30センチ押し戻して枠内に入れ、それでようやく搭乗橋を接続できました。結果として停止してから搭乗橋(PBB: Passenger Boarding System)を接続するまで10分以上かかってしまいました。浦東空港のVDGSを使用する際、時速が7.7kmを超えると「Slow Down」のメッセージが表示されるため、速度を落とすよう注意が必要です。
項目が多すぎるので、今日はとりあえずここまでにします。感想は2つあります。 1つ目は、非常に経験豊富なパイロットであっても認知バイアスによってミスを犯すことがあり、たとえ飛行任務に最終的に大きな影響を及ぼさなかったとしても、経験を総括し、積極的に共有することは非常に重要だということです。 2つ目は、PF(操縦担当)とPM(監視担当)の役割分担が重要すぎるということです。たとえアプローチ中という極めて多忙な段階であっても、PMは自身の監視という主たる責任を忘れてはならず、PFが担当すべき作業に過度に関与すべきではありません。
付録 http://jihatsu.jp/news/feedback/FEEDBACK%202014-001.pdf http://jihatsu.jp/news/feedback/FEEDBACK%202014-002.pdf http://www.abc-narita.ac.jp/25_news/Abbreviation121016.pdf
-
-
X-Plane 10.40 Beta 4
Beta4も登場しました。リリースノートを見ると、もちろんバグ修正が中心です。例えば、QPAC製品が使用できない問題、Plane-Makerのいくつかの問題、そしていくつかの小さな問題の改善などが含まれています。 約1時間の試飛行を行いましたが、大きな問題は見当たりませんでした。安心してアップグレードできます。
Beta 4 で修正された項目
apt.dat のソート機能と最初の文字を復元しました。これにより QPAC アドオンが修正されます。(bug 1673) Jar A330 のような高度なアニメーションを持つ航空機で発生していた Plane-Maker のクラッシュを修正しました レンダリングプリセットの最低設定で道路が表示されないように修正しました (bug 1672)。 上空風のパーサーを修正して、緯度/経度のステーションを読み取るようにしました Plane Maker に超軽量機 (Ultralight) の分類を追加しました Plane-Maker の登録番号(テールナンバー)に関するバグを修正しました:空の登録番号、6桁の登録番号が許可され、既存の登録番号が消去されないようになりました。(Bugs 1665,1666,1679) コース (Back Course) が選択されているとき、オートパイロットのグライドスロープを無効にしました (bug 1680) ATIS の報告内容を改善 - 変動する風向を正しく報告し、実際のウインドシア警報システムと同じタイミングでウインドシアの警報を発するようになりました ATIS での露点温度の報告を修正しました METAR が ‘few’ と読まれる場合、ATIS は ‘scattered’ ではなく ‘few’ と報告するようになりました コマンドがアルファベット順に並べ替えられ、見つけやすくなりました 3-D コックピット レンダリング オプションのデフォルト設定は、航空機が 3-D コックピットを持っている場合のみ 3-D コックピットを表示するように修正されました (bug 1677) ティラーを使用した前輪操舵が、ラダーと正しく連動して補間されるよう修正しました (bug 1676) ブーストポンプを作動させている際のエンジンのフラッディング(かかり過ぎ)を修正しました (bug 1675) Pro-key のオプションで、更新通知を受け取らないようにする機能を修正しました。 コマンドインターフェースがスクロールして、すべてのコマンドを表示するようになりました。
-
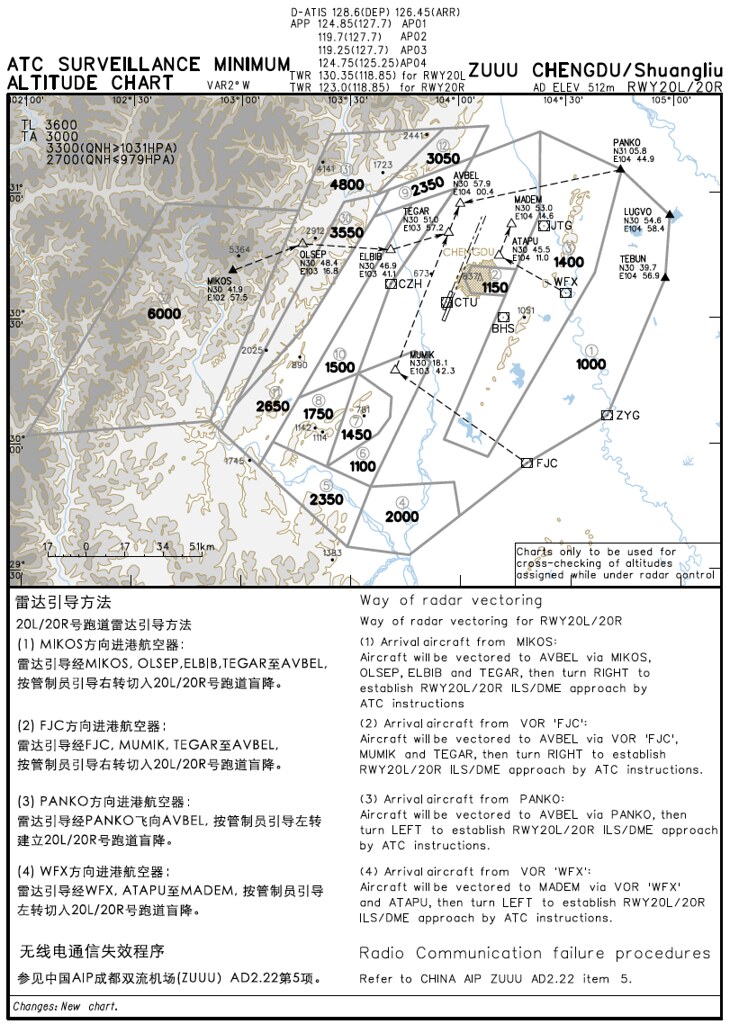
最低監視誘導高度図
暇つぶしにAIPを読んでいたら、<a href=<a href="/blog/ja/2014/04/eaip.html<a href=>“中国民航eAIPに新しい種類の航図――最低監視誘導高度図 ATC Surveillance Minimum Altitude Chart――が追加されているのに気づきました。これは新しい知識ポイントだったので、調べてみることにしました。
ICAOによるATC Surveillance Minimum Altitude Chartの説明は次の通りです: This supplementary chart must provide information which will enable flight crews to monitor and cross-check altitudes assigned while under radar control by a controller using an ATS surveillance system. つまり、レーダー誘導下において、乗員が各レーダー誘導エリアや誘導セクターの最低高度を相互チェック・監視するために使用するものです。
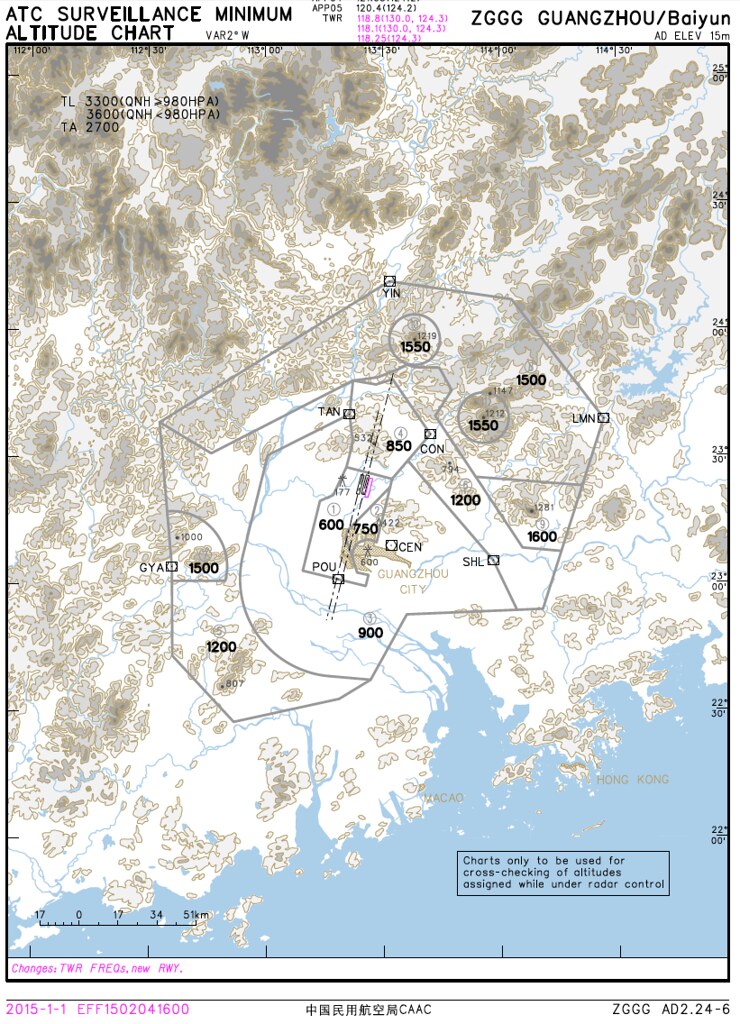
現在、中国民航が発表している最低監視誘導高度図は3つのみです。すなわち、成都/双流空港の02L/02Rおよび20L/20R用の2つ、そして広州/白雲空港の1つです。
図はなかなか直感的に見て取れます。破線はレーダー誘導時のルートを示しており、各セクターの最低レーダー誘導高度と組み合わせることで、安全な障害物余裕(オブクルランス)を比較的明確に理解できるようになっています。
1 成都/双流 CHENGDU/Shuangliu ZUUU AD2.24-6A ATCSMAC RWY02L/02R
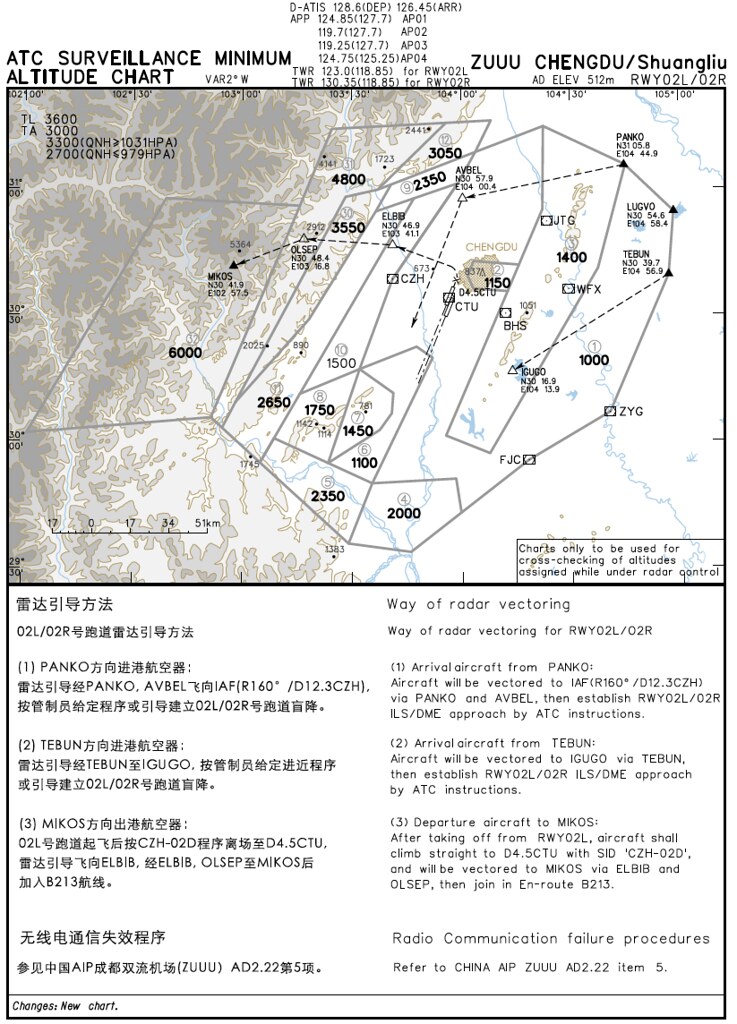
2 成都/双流 CHENGDU/Shuangliu ZUUU AD2.24-6B ATCSMAC RWY20L/20R
3 広州/白雲 GUANGZHOU/Baiyun ZGGG
完
-
FlightGear試用感想
百度贴吧で美人女性パイロットがFlightGear—もう一つの有名なフライトシミュレーターソフト—を紹介しているのを見かけたので、インストールして1、2時間ほど試用してみました。使用時間は短いですが、このソフトはもう少し遊んでみようと思いました。X-Planeと比べて、その特徴は次の通りです: 1 完全無料 2 シーナリー(地景)がネットから自動的にダウンロードでき、一つ一つ自分で探す必要がない 3 容量が小さく、ダウンロードパッケージはわずか1G。X-Planeの8枚のDVDに比べて、インストールが容易で、ネットワークとハードウェアへの要求も少ない 4 フライト中も比較的軽快で、操縦感は比較的ダイレクトで反応が速い。X-Planeのような少しの鈍重さはない 5 拡張機能が多く、ハードウェアサポートも良好 6 3Dモデルの質感は少し劣るため、見た目はよりゲームソフトのように見え、リアリティという点ではX-Planeに比べてかなり見劣りする
インストール前にFlightGearの公式サイトでドキュメントを読んでみましたが、このソフトの使用は一般的な人には少し難しいかもしれないと感じました。環境変数やXML設定ファイルなど、コマンドラインでコマンドを実行し、コマンドラインで様々なオプションを使用するなど、なかなか面倒です。自分にとっては、20年以上UNIXを使っているので、こういったドキュメントに親近感を持ちました、呵呵。
しかし実際に公式サイトからFlightGear v3.4.0をダウンロードしてみると、書かれているほど面倒でもなく、実にシンプルでした。 Macへのインストール方法を簡単にまとめると: 1 上記のページから圧縮パッケージFlightGear-3.4.0.dmgをダウンロードします。サイズは1.17GB。自宅では合計で約1時間かかってダウンロードが完了しました 2 FlightGear-3.4.0.dmgを開くと、FlightGear.appが得られます。FlightGear.appをApplicationディレクトリにコピーします 3 FlightGear.appを実行します 以上です。本当に簡単です。 上記のダウンロードページには機体とシーナリーファイルが個別にダウンロードできますが、シーナリーは自動的にネットからダウンロードできるので、現段階でインストールする必要はありません。
さて、実行して試してみましょう。FlightGear.appをクリックすると起動画面が見られます。実際にはこれは選択画面で、使用者が今回のフライトの機体、出発空港、および天気/時刻などの条件を選択するためのものです:
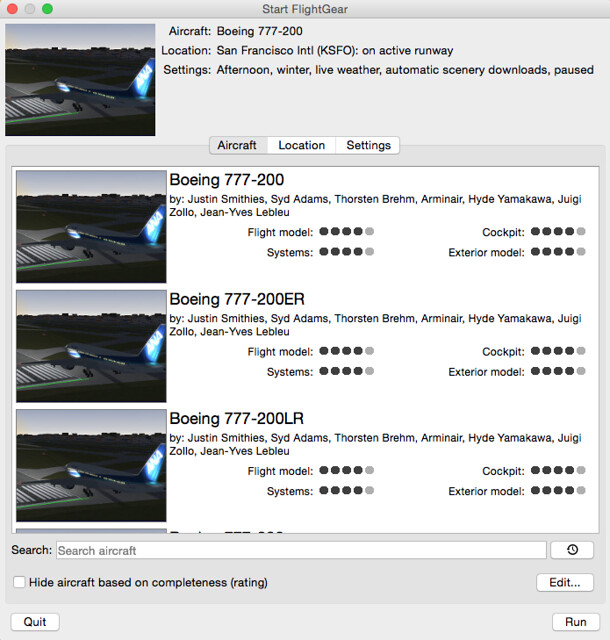
機体ファイルをダウンロードしていないため、初回実行時にはデフォルトの機体としてボーイング777、セスナ172、ビーチクラフト1900、パイパーPA-34、F-14、零式戦闘機などが見られます。上のスクリーンショットではボーイング777-200の機体を選択し、場所はサンフランシスコ空港、時刻は冬の午後、天気はリアルタイム天気、シーナリーは自動ダウンロード時の設定にしています。
もちろん初めての飛行はやはり慣れた場所がいいので、C172と羽田空港を選択し、右下のRunボタンを押しました。
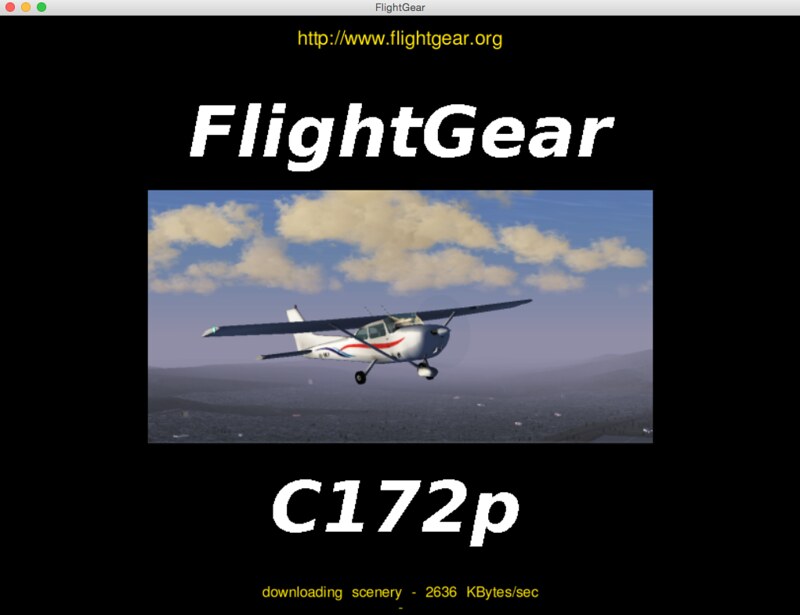 プログラムがロード段階に入ります。シーナリーファイルがないため、画面下方にシーナリーをダウンロード中の情報が見られます。
プログラムがロード段階に入ります。シーナリーファイルがないため、画面下方にシーナリーをダウンロード中の情報が見られます。そういえば、テストなので、CHのFighterStickフライトスティックのみを外部機器として接続し、Saitekのラダーペダルとヨークなどは使用しませんでした。
1~2分後に初期化が完了すると、コックピットモードに入ります。羽田空港の第1ターミナルのモデルや塔などのシーナリーは悪くないのですが、なぜか第2ターミナルと国際ターミナルがありません。ただし4本の滑走路はあり、場所は一目で認識できます。ショートカットキーの使い方に不慣れだったため、画面上部のHelpメニューをクリックしてShortcutKeysのダイアログを表示させました。
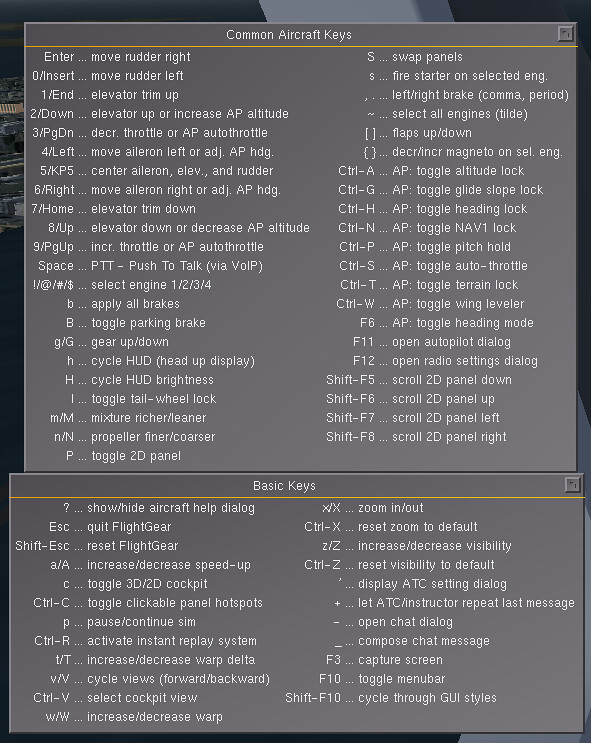 その場で学んで実践しましょう:
sキーでエンジン始動
]でフラップ下げ
FighterStickのスロットルボタンを押す(ソフトが自動的に見つけてくれたようだ)
Bキーでパーキングブレーキ解除
,と.で左右のブレーキを制御し、滑走路中央に合わせる
FighterStickのスロットルボタンを最大まで押し、機体が前進し始める
0キーとEnterキーで左右のラダーを制御し、滑走路上で機体をできるだけ直進させる
55ノット程度で操縦桿を引き、機体は上昇を開始し、[でフラップを上げ、東京市内に向けて旋回し、スクリーンショットを撮った
その場で学んで実践しましょう:
sキーでエンジン始動
]でフラップ下げ
FighterStickのスロットルボタンを押す(ソフトが自動的に見つけてくれたようだ)
Bキーでパーキングブレーキ解除
,と.で左右のブレーキを制御し、滑走路中央に合わせる
FighterStickのスロットルボタンを最大まで押し、機体が前進し始める
0キーとEnterキーで左右のラダーを制御し、滑走路上で機体をできるだけ直進させる
55ノット程度で操縦桿を引き、機体は上昇を開始し、[でフラップを上げ、東京市内に向けて旋回し、スクリーンショットを撮った

東京タワー、スカイツリー、お台場の東京湾橋、六本木などのランドマークがはっきりと見え、地上の小さな建物も密に並んでいて、表示速度が遅いと感じることもなく、基本は比較的滑らかでした。
操縦感は、前述したように比較的軽快で、機体の反応はとても柔軟で、かつフライト感覚は比較的安定しており、舵操作量はX-Planeより少し少ないです。コックピット内部はテクスチャ感に欠けるため、最初は少し不適応でしたが、徐々に慣れてきました。計器表示もとても明瞭で、様々なデータが読み取りやすいです。空気力学の面でも比較的リアルに感じ、プロペラ効果などもあり、安定性も良好です。X-Planeよりも操縦がしやすく、新人が始めるのに適しています。コックピット内の視点は機体の姿勢変化に伴って変化し、これも一種のリアルなシミュレーションなのかもしれませんが、今のところまだ少し不適応です。
表示関連のショートカットキーは以下の通りです: vとV 各視点の切り替え Ctrl-V コックピット視点に戻る x/X ズームイン/ズームアウト z/Z 視程の拡大/縮小 F3 スクリーンショット Ctrl-R リプレイモード p 一時停止
このリプレイモードは便利だと思います。スクリーンショットを1枚載せます。
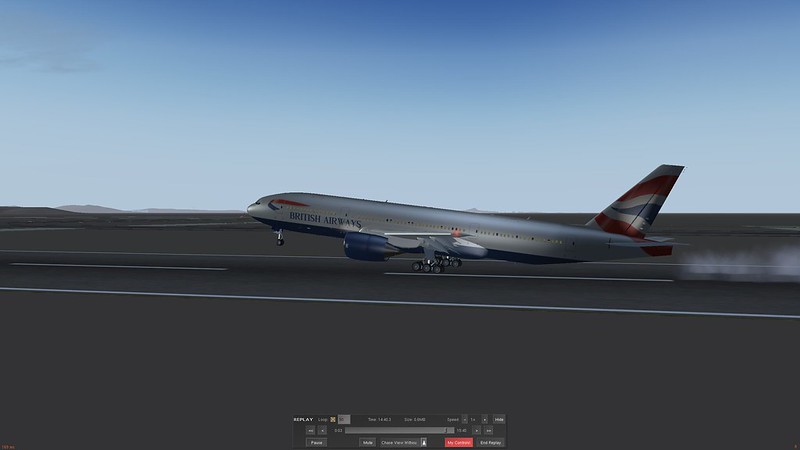
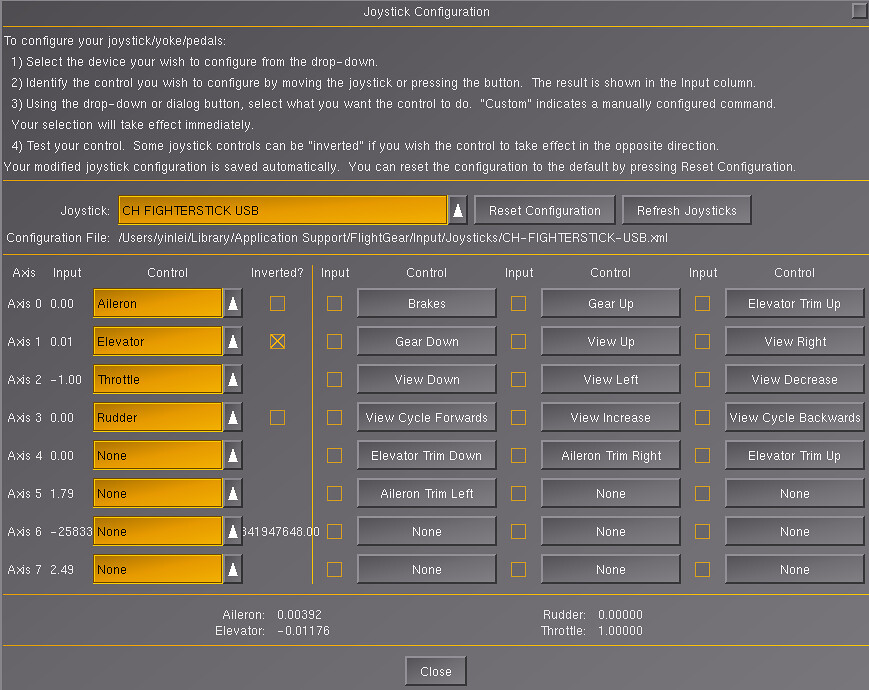
FighterStickには多くのボタンがあり、使わないのはもったいないので、すべてに割り当てました。現在は基本キーボードを使わず、スティックだけでフライト操作と視点操作ができるようになりました:
そういえば、この777のコックピット内部はかなり良くできていて、思い出させられました。。。(話が逸れたので、1000字省略) 今後はもっと練習します!
次のステップは、機体を追加する方法を学び、美人女性パイロットが制作したDo 328を試してみることです。
完
-
全日空 東京羽田-上海虹橋 NH1259 便 乗船記
こういったフライトの体験記を書くのは久しぶりですね。前回書いたのは2年前のCX543の時でした。昨年9月から<a href="/blog/ja/2014/08/Use-of-Electronics2"機内での電子機器使用が日本で解禁になりましたが、自分はあまり外出していなかったので、フライトの様子を撮影記録する機会がずっと後回しになっていました。
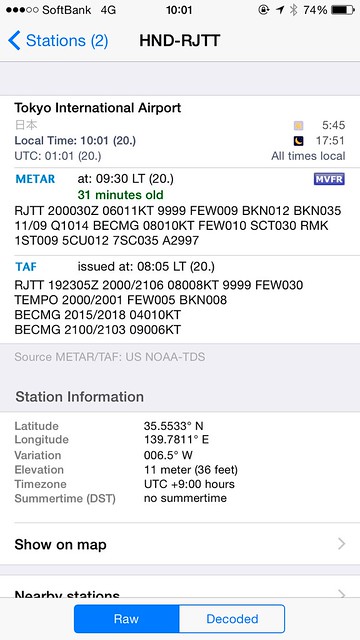
今回(数ヶ月前)の上海旅行では全日空NH1259便を利用しました。個人旅行ですし、そこそこの経済感度で窓席が取れれば十分満足です。例によって、出発前に羽田国際線ターミナルの展望デッキへ行き、今回搭乗する機体を確認しました。ボーイング777-200ER、JA708A。2000年5月製造、製造番号28277、Spotは110です。
 当日の天気はあまり良くなく、分厚い層雲と積雲が空を覆っていました。
当日の天気はあまり良くなく、分厚い層雲と積雲が空を覆っていました。天気図を見る限りでは悪くない。低気圧は去り、高気圧はまだ来ていない。
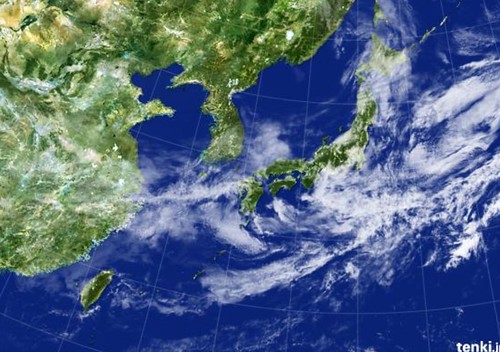
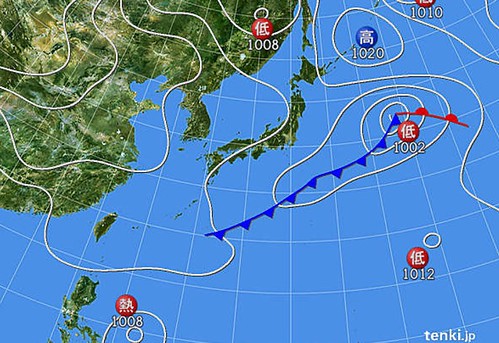 衛星写真を見ると、まだ雲の量が多いことがわかります。
衛星写真を見ると、まだ雲の量が多いことがわかります。
 そのため、手元には小さなコンパクトカメラRX100
そのため、手元には小さなコンパクトカメラRX100とiPhone6だけを持って搭乗しました。
飛行機がプッシュバックされてから、SPOT109に停まっていた全日空の別の777-300ER、JA785Aの後ろに止まりました。
 私の席から見ると、ちょうどJA785Aの真後ろでした。この撮影アングルはなかなか珍しく、特に両側の地上車両が左右対称に並んでいて、一種のバランスの美しさがあります。
私の席から見ると、ちょうどJA785Aの真後ろでした。この撮影アングルはなかなか珍しく、特に両側の地上車両が左右対称に並んでいて、一種のバランスの美しさがあります。

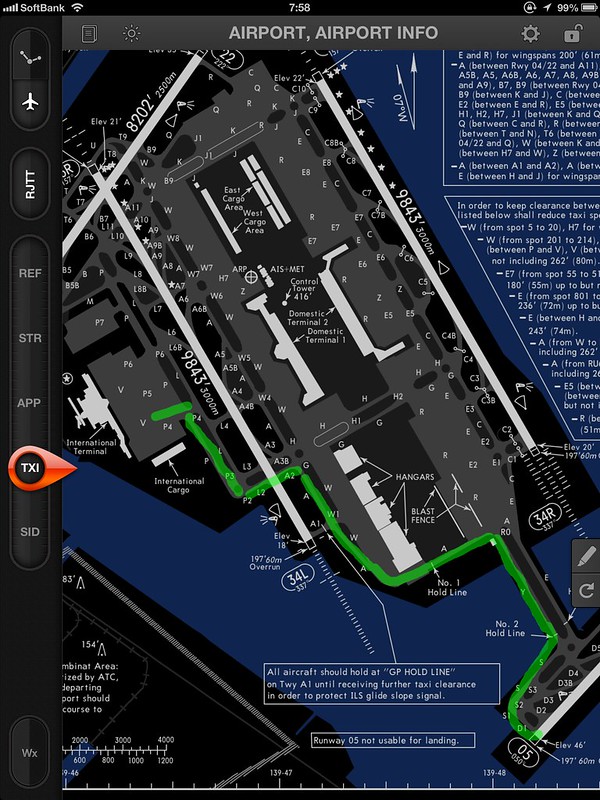
地上走行のルートは、基本的に先ほどのCX543と変わりません。P4、P2、L2、A2、そしてA誘導路に沿ってY誘導路まで。10時3分にドアクローズ、7分にプッシュバック、12分にタクシーイング開始、D1の05滑走路入り口へ。10時25分に離陸。ほぼノンストップでした。
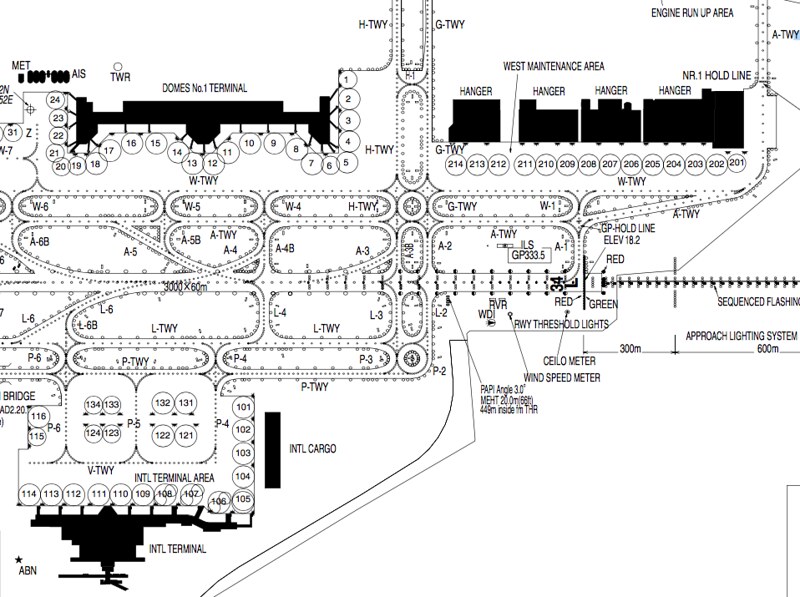
以下の場所は、電子機器使用禁止が解禁される以前は写真撮影が許可されていなかったため、撮影した写真を一つ一つ掲載します。 L2の付近では、滑走路視距離(RVR)を測定する透過計と風速計(Wind Speed Meter)が見えます。
 A2とA1の間では、34L滑走路のILSのグライドスロープ(GS)アンテナが見えます。
A2とA1の間では、34L滑走路のILSのグライドスロープ(GS)アンテナが見えます。
 同様にA誘導路を東へ移動すると、南側に十数基の燃料タンクが見えます。
同様にA誘導路を東へ移動すると、南側に十数基の燃料タンクが見えます。
 桟橋に近づくY誘導路では、専用の消防車と消防ステーションが見えます。
桟橋に近づくY誘導路では、専用の消防車と消防ステーションが見えます。
 Y誘導路から西へS誘導路へ曲がる途中で、北へ振り返ると羽田空港、桟橋、燃料タンク、そして遠くの第2ターミナルと塔が一望できます。
Y誘導路から西へS誘導路へ曲がる途中で、北へ振り返ると羽田空港、桟橋、燃料タンク、そして遠くの第2ターミナルと塔が一望できます。
 S誘導路の途中、西側に見慣れた<a href="/blog/ja/2014/11/rjtt-ukisima"浮島町公園が見えます。昨年書いた<a href="/blog/ja/2014/11/rjtt-ukisima"このブログ記事で、羽田D滑走路の桟橋構造について詳しく紹介しました。
S誘導路の途中、西側に見慣れた<a href="/blog/ja/2014/11/rjtt-ukisima"浮島町公園が見えます。昨年書いた<a href="/blog/ja/2014/11/rjtt-ukisima"このブログ記事で、羽田D滑走路の桟橋構造について詳しく紹介しました。
 S1からD1へ誘導中。
S1からD1へ誘導中。
 離陸前にもう一度浮島町公園を振り返り、ふふっ。
離陸前にもう一度浮島町公園を振り返り、ふふっ。

飛行機が05滑走路に乗ると、すぐに加速して離陸し、そのまま右へ旋回します。<a href=/view1.php?file=doc/AIP-J/RJTT_Tokyo_INTL.pdf>YANAG ONE DEPARTUREという標準出発手順(SID)を使用します。
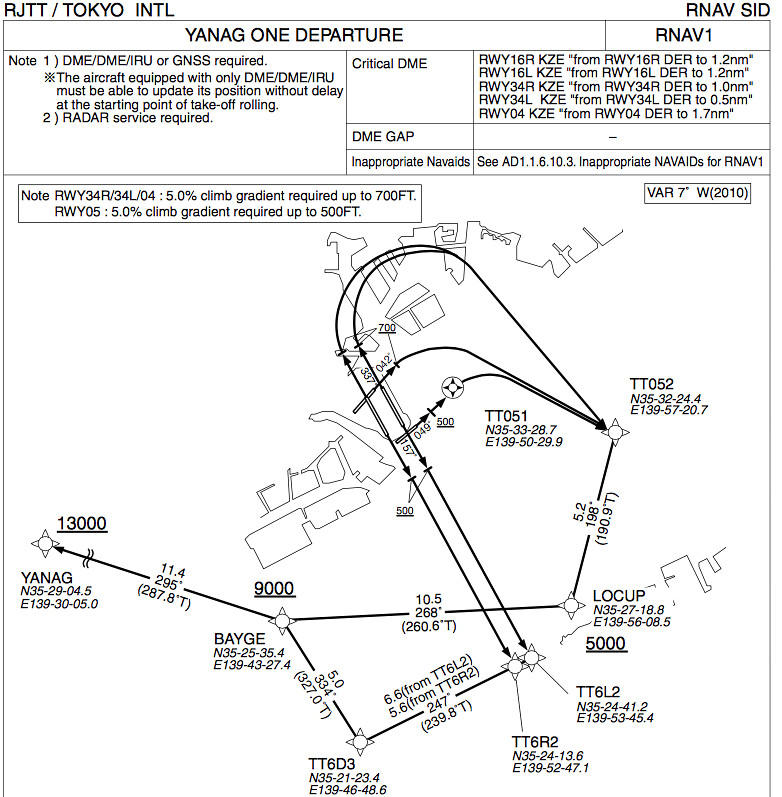 RWY05: Climb on HDG049 ̊ at or above 500FT, direct to TT051, turn right direct to TT052,
to LOCUP at or above 5000FT, to BAYGE at or above 9000FT, to YANAG at or above 13000FT.
RWY05: Climb on HDG049 ̊ at or above 500FT, direct to TT051, turn right direct to TT052,
to LOCUP at or above 5000FT, to BAYGE at or above 9000FT, to YANAG at or above 13000FT. -
X-Plane 10.40 ベータ版 3 がリリースされました
10.40 Beta 3がリリースされました。もちろん、新機能はなく、バグ修正のみです。いずれもbeta2での些細な問題です。
- NVidiaのWindows環境で、回転するプロペラによるパフォーマンスの低下を修正しました。
- 一部のMacで発生していた起動時のクラッシュを修正しました。
- 古いGPS/FMCがKTPAやその他の空港コードを検知しない問題を修正しました。
- リアルウェザーがMETARを正しい位置に割り当てない問題を修正しました。
- シーナリーエンジンで、オブジェクトのアニメーション順序が正しくない場合にクラッシュする問題を修正しました。これによりEHLEが修正されます。1030でクラッシュし始めたシーナリーが再び動作する可能性がありますが、作成者による修正が推奨されます。
- 磁気偏角を更新しました。
- R22のクラッチを修正しました。
- スライダーのリプレイを修正しました。
- 空のapt.datファイルに対する誤ったログメッセージを修正しました。
- Airfoil-Makerのドイツ語メニューのタイプミスを修正しました。
- 機体使用間でホブス時間が正しく保存されない問題を修正しました。
- 新しいナビゲーション無線機3-10のデータレフが正しく機能するように修正しました。
- USB Pro Key使用時の「運用と警告(operations and warnings)」におけるUIエラーを修正しました。
- 起動シークエンスの暗くて陰鬱な感じを軽減しました。
更新して簡単にテストしてみましたが、特に問題は見つかりませんでした。
10.40はますます安定しており、あと1ヶ月もすればbeta段階を脱するのではないでしょうか。
-
25,000の空港シーナリー!Scenery for 25000 small airports
初心者にとって、X-Planeで最も理解しがたい点は、数十ギガバイトものハードディスク容量を占有しているにもかかわらず、ほとんどの空港ががらんとしており、実質的に一本の滑走路と荒れ地しかなく、がっかりさせられることです。
徐々に慣れてくるにつれて、様々なシーナリーアドオンをダウンロードしてインストールする方法を学び、初心者の段階を卒業していくことでしょう。
しかし今日、素晴らしいアドオンを見つけました。Scenery for 25000 small airports です。 これは25,000の小さな空港のシーナリーを含むと謳っています。 これがあれば、秃げ上がったX-Planeの地上景色が一気に改善されるでしょう。
インストール方法は以下の通りです:
-
上記のURLからファイルをダウンロードします。それぞれ
x_Prefab_Library、x_Prefab_Airports_1xp、x_Prefab_Airports_2xpの3つの圧縮ファイルがあります。 -
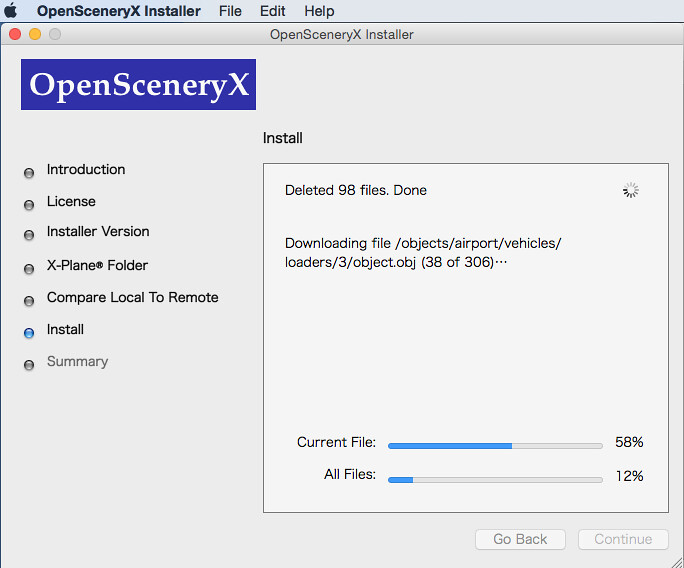
最新版のOpenSceneryX (2.1.1) をインストールします。
-
いくつかの圧縮ファイルを解凍し、
Custom Sceneryディレクトリの下にコピーします。 -
X-Planeを起動して
scenery_packs.iniファイルを自動的に更新させ、その後X-Planeを終了します。 -
エディタで
scenery_packs.iniを開き、最上部にある以下の行を、SCENERY_PACK Custom Scenery/x_Prefab_Airports_1xp/SCENERY_PACK Custom Scenery/x_Prefab_Airports_2xp/SCENERY_PACK Custom Scenery/x_Prefab_Library/様々なカスタムシーナリーの後ろに移動します。これにより、このシーナリーパッケージが以前にインストールしたシーナリーを上書きしてしまうのを防ぎます。 例えば、私の環境での設定は以下のようになっています:
SCENERY_PACK Custom Scenery/Japan Tokyo/ SCENERY_PACK Custom Scenery/RJAF Matsumoto jp/ SCENERY_PACK Custom Scenery/USA_HI_OAHU_PHNL_Honolulu Intl v2.1/ SCENERY_PACK Custom Scenery/Aerosoft - EBBR Brussels/ SCENERY_PACK Custom Scenery/Aerosoft - EDDF Frankfurt/ SCENERY_PACK Custom Scenery/Aerosoft - EDDM Munich/ SCENERY_PACK Custom Scenery/Aerosoft - EDDT Berlin Tegel/ SCENERY_PACK Custom Scenery/Aerosoft - EDLP Paderborn-Lippstadt/ SCENERY_PACK Custom Scenery/Aerosoft - EGBB Birmingham/ SCENERY_PACK Custom Scenery/Aerosoft - EGKK London-Gatwick/ SCENERY_PACK Custom Scenery/Aerosoft - EGLL Heathrow/ SCENERY_PACK Custom Scenery/Aerosoft - EGPF Glasgow/ SCENERY_PACK Custom Scenery/Aerosoft - EGSS London-Stansted/ SCENERY_PACK Custom Scenery/Aerosoft - EIDW Dublin/ SCENERY_PACK Custom Scenery/Aerosoft - LEBL Barcelona/ SCENERY_PACK Custom Scenery/Aerosoft - LEMD Madrid/ SCENERY_PACK Custom Scenery/Aerosoft - LFMN Nice Cote d Azur X/ SCENERY_PACK Custom Scenery/Aerosoft - LFPG Paris CDG/ SCENERY_PACK Custom Scenery/Aerosoft - LFPO Paris Orly/ SCENERY_PACK Custom Scenery/Aerosoft - LPFR Faro/ SCENERY_PACK Custom Scenery/Aerosoft - LSGG Genf/ SCENERY_PACK Custom Scenery/Global Airports/ SCENERY_PACK Custom Scenery/x_Prefab_Airports_1xp/ SCENERY_PACK Custom Scenery/x_Prefab_Airports_2xp/ SCENERY_PACK Custom Scenery/x_Prefab_Library/ SCENERY_PACK Custom Scenery/LOWI Demo Area/ SCENERY_PACK Custom Scenery/KSEA Demo Area/ SCENERY_PACK Custom Scenery/KSEA Demo Terrain/ SCENERY_PACK Custom Scenery/ff_library/ SCENERY_PACK Custom Scenery/ff_library_extended_LOD/ SCENERY_PACK Custom Scenery/osm2xp/ SCENERY_PACK Custom Scenery/ruscenery/ SCENERY_PACK Custom Scenery/OpenSceneryX/ SCENERY_PACK Custom Scenery/zzz_hd_global_scenery3/
これでOKです。
-
-
X-Plane 10.40 beta1 初步印象
帰宅するなりX-Planeを10.40 beta1にアップグレードし、<a href=<a href="/blog/ja/2015/06/rjaf-matsumoto-airport.html<a href=>“松本空港付近を一周飛行してみましたが、 <a href=<a href="/blog/ja/2015/06/x-plane-1040dsf-loader.html<a href=>“以前の紹介の通り、遠方の視界は確かに改善されましたが、 その代わり表示速度もかなり遅くなり、フレームレートは25-30から10-15前後に低下しました。 以下ではスクリーンショットを使いながら、いくつかの更新点を見ていきましょう。
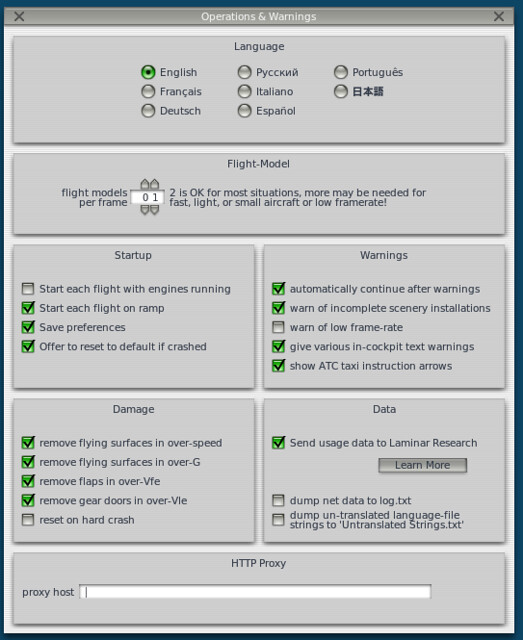 上の操作と警告設定では、選択肢がかなり増えています。
例えば、Startupの「Offer to reset to default if crashed」はクラッシュ後の表示モードを選択でき、
Warningsの「show ATC taxi instruction arrows」は地上滑走時の矢印表示をオフ
上の操作と警告設定では、選択肢がかなり増えています。
例えば、Startupの「Offer to reset to default if crashed」はクラッシュ後の表示モードを選択でき、
Warningsの「show ATC taxi instruction arrows」は地上滑走時の矢印表示をオフ
-
10.40 beta1 リリース!
<a href=http://www.x-plane.com/?article=x-plane-10-40-release-notes>X-Plane 10.40 beta1がついに登場しました。このバージョンの新機能を見てみましょう。
576の新しい空港シーナリーが追加されました。中国では北京国際、深圳宝安、香港新空港、日本では成田、札幌新千歳が含まれ、これによりシステム全体の3D空港は合計1730箇所となりました。
天気の再生成を行うショートカットキー “sim/operation/regen_weather” が追加されました。
上空の風情報をネットワークから取得できるようになりました。
METARからウィンドシアをシミュレートするようになりました。
新しい分散型シーナリー読み込み方式により、マルチコアCPUを使用して読み込み時間を短縮!!
遠方の視野に関する新しいオプション!!
アニメーション形式がQuicktimeからAVI形式に変更されました。
新しいレンダリングオプションが追加されました。あらかじめ設定された数段階から表示速度と画質のバランスを簡単に調整できます。表示速度優先から画質優先まで、全5段階!
夜間のライトのサイズが画面サイズに比例して変化するようになりました。
地上走行時の矢印表示は、Operations and Warningsでオン・オフを設定できます。
飛行中にOSのスクリーンセーバーを確実に無効化できるようになりました !!。
以前はX-Planeがクラッシュすると表示が常にウィンドウモードに初期化されていましたが、Settings/Operations and Warningsに新しいオプションが追加され、クラッシュ前のモードに直接戻れるようになりました!
コックピット内のフラップ位置表示が翼の実際の位置と同期するようになりました(以前は同期していませんでした)!
点火後の電圧表示が正しい方式に変更されました。
各機体の飛行距離計が追加されました!
2Dコックピットモードでの風防特殊エフェクト(バードストライクや雨天など)を無効化できるようになりました。
予備の手動スロットルがレギュレーターより優先されなくなりました。
油温計や燃料系の故障シミュレーションがサポートされました。
より良いコンプレッサー・ストールの演出効果。
エンジン即始動コマンドが追加され、毎回手動で時間をかけて始動する必要がなくなりました!
special/Toggle Nearby Air Traffic Controllersメニューが新設され、近くのATC周波数一覧をポップアップ表示できます。その周波数をクリックするだけでCOM1に自動設定されます !!
Operations & Warnings にシステムのパフォーマンス情報を自動収集するオプションが追加されました。これによりX-Planeの開発者は、ユーザーの様々なパフォーマンス問題を把握できるようになります。
以上
-
松本空港地景RJAF Matsumoto Airport
長野は日本の内陸部に位置する地域で、1998年冬季オリンピックの開催地として有名です。 ここには標高3000メートルを超える雪山があり、景色は素晴らしく、登山やスキー愛好家にとっての天国です。 私は毎年長野を訪れていますが、主な目的は温泉を楽しむことです。
松本空港シーナリーが公開されたので、もちろん見逃すわけにはいきません。 x-plane.orgからインストールパッケージをダウンロードし、解凍後に「RJAF Matsumoto jp」ディレクトリをCustom Sceneryに移動します。 その後、scenery_packs.iniに以下の行を追加します。 SCENERY_PACK Custom Scenery/RJAF Matsumoto jp/ これで準備完了です。
ところで、このアドオンにはOpenScenery Xが必要ですが、当ブログの読者の皆さんなら、既にインストールされていることと思います。
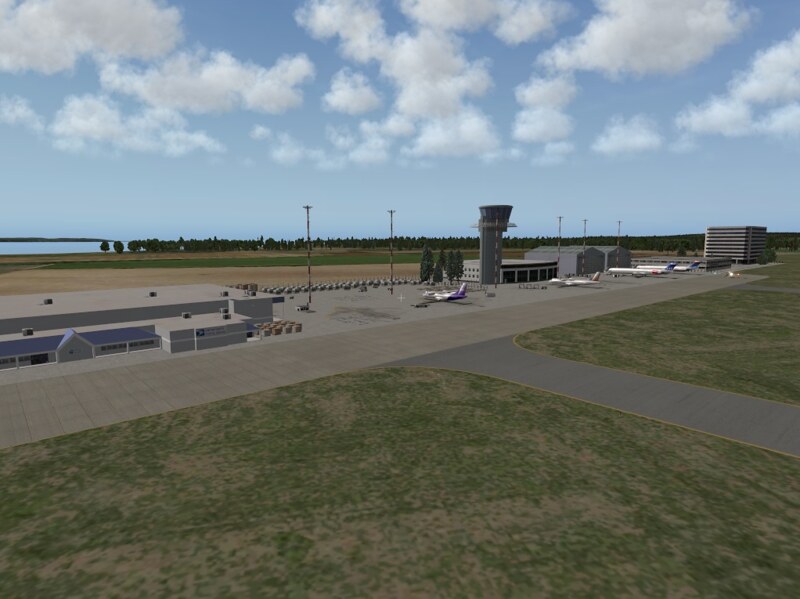
スクリーンショットを2枚添付します。個人的に、このアドオンは良くできていると思います。細部のディテールが非常に精巧なので、おすすめします。


また、松本空港の航空図は当サイトの<a href="/x-plane10/view1.php?file=doc/AIP-J/RJAF_Matsumoto.pdfこちらで確認できます。 注意点ですが、この空港の近くには高山が連なっており、さらにILSによる精密進入がありません。そのため、安全には十分注意してください。ビギナーにとって、離着陸はなかなかの挑戦になるかもしれません。
以上です。
追記 先日小旅行に行ってきましたので、旅行記を書いて皆さんと共有したいと思います。 <a href="/kamakura-summer.>鎌倉と夏の風物詩・紫陽花 <a href="/hirosaki-sakura.>青森県弘前公園の桜