フライトシミュレーター愛好家のノート
-
X-Plane ATCシステムマニュアル-1
公式の X-Plane 12 ATC System Manual が公開されましたので、ここで学習ついでに日本語版に翻訳しておきましょう。(実のところChatGPTによる意訳です)。
概要
ATC(航空交通管制)システムは、航空機の移動を調整し、必要な情報を伝達することで、あなたとその他の空の利用者の安全を確保するように設計されています。フライトプランを使用して定められた航空路を飛行する場合でも、任意の場所を飛行する場合でも、ATCサービスを利用できます。ATCは、ほぼすべての現実の飛行シナリオにおいて不可欠な要素です。本物の航空機を操縦するには、無線通信免許と操縦士免許が必要であることを覚えておいてください。X-PlaneのネイティブATCと、その他のATCまたは類似のシステムを同時に使用しようとしないでください。これらのシステムは互いの動作を認識しません。
通常、どの時点においても、あなたの航空機は1人の管制員のみが担当します。一度ATCとのやり取りを開始すると、あなたの航空機はその管制員と関連付けられます。一度関連付けが確立されたら、明示的な指示がない限り、現在の管制員の周波数から勝手に変更してはなりません。このガイドでは、この関連付けを「所有権」と記述しています—-どの時点でも、あなたの航空機が「所有」される管制員は最大1人だけです。慣例として、その管制員のいずれかの周波数をCOM1の主周波数に設定する必要があります。
行うことができる要求や応答は、現在の状況(以前の要求、航空機の予想される任務、現在話している管制員の種類を含む)によって異なります。シミュレーションにはいくつかの異なるタイプの管制員が含まれていますが、すべての空港でこれらのサービスが提供されるわけではありません。
管制員の種類
- クリアランス・デリバリー(Clearance Delivery):空港にクリアランス・デリバリー管制員がいる場合、フライトプランを提出するために連絡する必要があります。これは「所有権」ルールの例外です。クリアランス・デリバリー管制員は航空機を「所有」しません。なぜなら、彼らは単一の機能しか実行しないからです。
- 地上管制(Ground Control):このタイプの管制員は、タキシング指令の要求や発行など、地上運用に関する許可と指示を提供する役割を担います。タキシールート上の最初の使用中の滑走路へ向かうまで(その滑走路が離陸用滑走路でなくても)、航空機は地上管制員によって「所有」されます。到着後、最後の使用中の滑走路から指定されたエプロンまでタキシングしている間も、地上管制員があなたの航空機を「所有」します。
- 塔(Tower):塔の管制員は、地上または空中を問わず、使用中の滑走路の付近または上空にある航空機を担当します。塔は、最終的な離陸指示、離陸または着陸の許可、および空港周辺のその他の機能を提供します。
- アプローチ/出発管制(Tracon or Approach):これらは通常、小規模な地域管制員であり、その空域を通過するフライトを調整し、通常はその空域の下にある空港への到着と出発を誘導します。
- センター(Center):これはシミュレーションで最大のタイプの管制であり、通常は巡航段階の航空機、または他の管制員の空域にいない航空機を担当します。
- 管制セクター(Controller sectors):単一の管制施設が担当する小規模な空域(つまり管制セクター)はシミュレートされていません。
通常、あなたの航空機を「所有」している管制員は、必要に応じて指示を出し、あなたの要求に応答します。一般的に、管制員が直接指示(例:「針路120へ右旋回」)を出した場合、あなたは即座に従い、指示を復唱する必要があります。復唱は、指示を正しく受信したことを確認するためです。シミュレーターでは、返信の内容を自分で作成する必要はないため、復唱は常に正しく行われます。ただし、復唱メッセージを送信する必要はあります。
注意が必要なのは、管制員はあなたのFMS(フライト管理システム、別名FMC)を完全に無視することです。FMSに航路をプログラムしても、ATCがその航路を承認するわけではありません。ATCに従う航路を伝えるためにフライトプランを提出し、計画通りに実行する必要があります。
管制員の指示は、航空機の安全を危険に晒すものでない限り、迅速に実行しなければなりません。一般的なルールは、「飛行優先(Aviate)、ナビゲーション次(Navigate)、コミュニケーション最後(Communicate)」です。
ほとんどの場合、管制員は「トランスポンダー・コード(Squawk Code)」を提供します。航空機のトランスポンダーにそのコードを素早く設定する必要があります。コードが間違っている場合は、正しく設定されるまで通知が届きます。管制員はまた、段階的に気圧設定を提供するので、それらを高度計に設定する必要があります。
同時に話すことは極めて無礼な行為です。相手が話を終えたと思っても、電波がクリアになるのを待ってから発話してください。各送信の終わりには、短い電波ノイズ(0.5秒未満)と「カチッ」という音が合図としてあります。この時間は、特に発話内容が長い場合に発言の準備に利用できます。電波がクリアになるまで、最終的な送信オプションを選択しないように注意してください。同じ周波数に多くのAI航空機がいる場合、通信を行うための隙間を見つけるのが難しいことがあります。これは現実世界でも同じです。シミュレーターは、AI航空機の要求と返信を可能な限りペアにして処理し、人間のパイロットよりも長く新しい要求の送信を待機しようとします。
時間が経つにつれて、どの通信が返信を受け取り、どの通信が受け取らないかがわかってきます。たとえ電波が一時的に混雑していても、すぐに静かになるため、発言する機会が得られます。安全のため、発言を試みる前に少なくとも1秒の間隔を置き、他の返信がないこと、および管制員が他の航空機との会話を終了したことを確認することをお勧めします。
空港の種類
ATCシステムでは、空港は3つのタイプに分類されます。 1. 管制空港(Controlled) これは大規模な空港の典型的なタイプで、通常、専門のスタッフが配置された塔を持ち、集中型情報システムに接続されています。シミュレーターはこの空港を「管制された」空港と呼び、完全なATCサービス機能を備えています。 2.無管制塔空港(Untowered) これは最小規模の空港のタイプで、無線施設がありません。現在はUNICOMはサポートされていませんが、これらの空港ではフライトプランを提出し、センターに連絡することで、最も基本的なATC操作を行うことができます。 3. FISO空港 このタイプの空港は米国以外の地域で一般的であり、公表された周波数があり、訓練を受けた要員が配置されていますが、集中システムの一部ではありません。FISO空港は、ATCに類似した広範囲のサービスを提供しますが、航空機に直接指示を与えるのではなく、情報とアドバイスを提供するものです。ただし、彼らのアドバイスには従う必要があります! シミュレーターでは、FISO空港の主な違いは、利用可能な要求のタイプが異なることであり、多くの内容が異なる方法で記述されます。また、周波数の切り替えはあなたが主体的に行う必要があります—-FISOに許可を求めるのではなく、周波数を切り替えることを伝える必要があります。FISO空港にはレーダーがないため、職員はあなたがその空域または通信範囲の端に到達したことを知らせてくれません。
空港のタイプは、WED(WorldEditor)で空港設計者が設定したデータによって決まります。設定されていない場合、シミュレーターはヒューリスティックな方法で判断します。X-Planeでは、空港のタイプが現実のタイプと異なる場合があります。地図上の「空港ポップアップウィンドウ」で空港のタイプを確認できます。

-
大画面でフライトシミュレーターを楽しむ
先日、日本のXiaomiが値下げセールをしていたので、29,800円で42インチのディスプレイを購入し、寝室に設置しました。 普段は主にYouTubeやAmazon Primeなどの動画を鑑賞しているのですが、 大画面でフライトシミュレーターを遊ぶのも悪くないのではと思い立ち、 HDMIで接続して試してみることにしました。
X-Plane 12の画像設定で、ディスプレイ1(つまりXiaomiのディスプレイ)をシミュレーターのフルスクリーン表示に設定し、 メインディスプレイ(つまりMacBook Proのディスプレイ)をインストラクター操作コンソールに設定します。
 Yawman Arrow Handheld Controllerを接続し、
セスナ172を起動してすぐに飛び立ちました。
Yawman Arrow Handheld Controllerを接続し、
セスナ172を起動してすぐに飛び立ちました。
スマホで短い動画をいくつか撮影したので、どのような仕上がりかご覧ください。





30〜40分ほどの短いフライトで離陸と着陸をこなしましたが、大画面でのフライトシミュレーションは私としてはかなり良好な印象を受けました。 主な利点は、スクリーンから2〜3メートル離れたソファに快適に座り、 セスナ172の機外の景色を思う存分堪能できる点です。 欠点は、ガラスコックピットの計器類があまり見づらいことです。多くの数字のフォントが小さすぎるためです。 おそらく、もっと昔ながらのアナログ計器(シミュレーション計器盤)を選択する方が、大画面には適しているのかもしれません。
-
羽田から伊丹空港へ
週末にminiCOCKPIT miniFCUとYawman Arrow Handheld ControllerをPCに接続し、
 成田と羽田の近くをしばらく自由飛行した後、羽田から伊丹へのルートを飛んでみることにしました。
成田と羽田の近くをしばらく自由飛行した後、羽田から伊丹へのルートを飛んでみることにしました。そこでsimbrief.comを開いて、航路を確認したところ次の通りでした: LAXAS3 LAXAS Y56 TOHME Y54 KOHWA Y546 AGPUK MIRAI ABENO IKOMA
すぐにFMSに入力し、羽田の滑走路05から離陸しました。



コロナ以降、大阪には行っていなかったので、降下時の都会の景色を眺めているとなつかしくなりました。

着陸も完全自動操縦で、XP12のデフォルトA330モデルの扱いはなかなか楽チンですね。


-
X-Plane 12.1.0のテスト
週末にX-Planeを12.1.0-beta-2にアップグレードし、ヨセミテ付近をしばらく飛行しましたが、基本的に安定して動作しており、特にbugも発生せず、概ね満足しています。
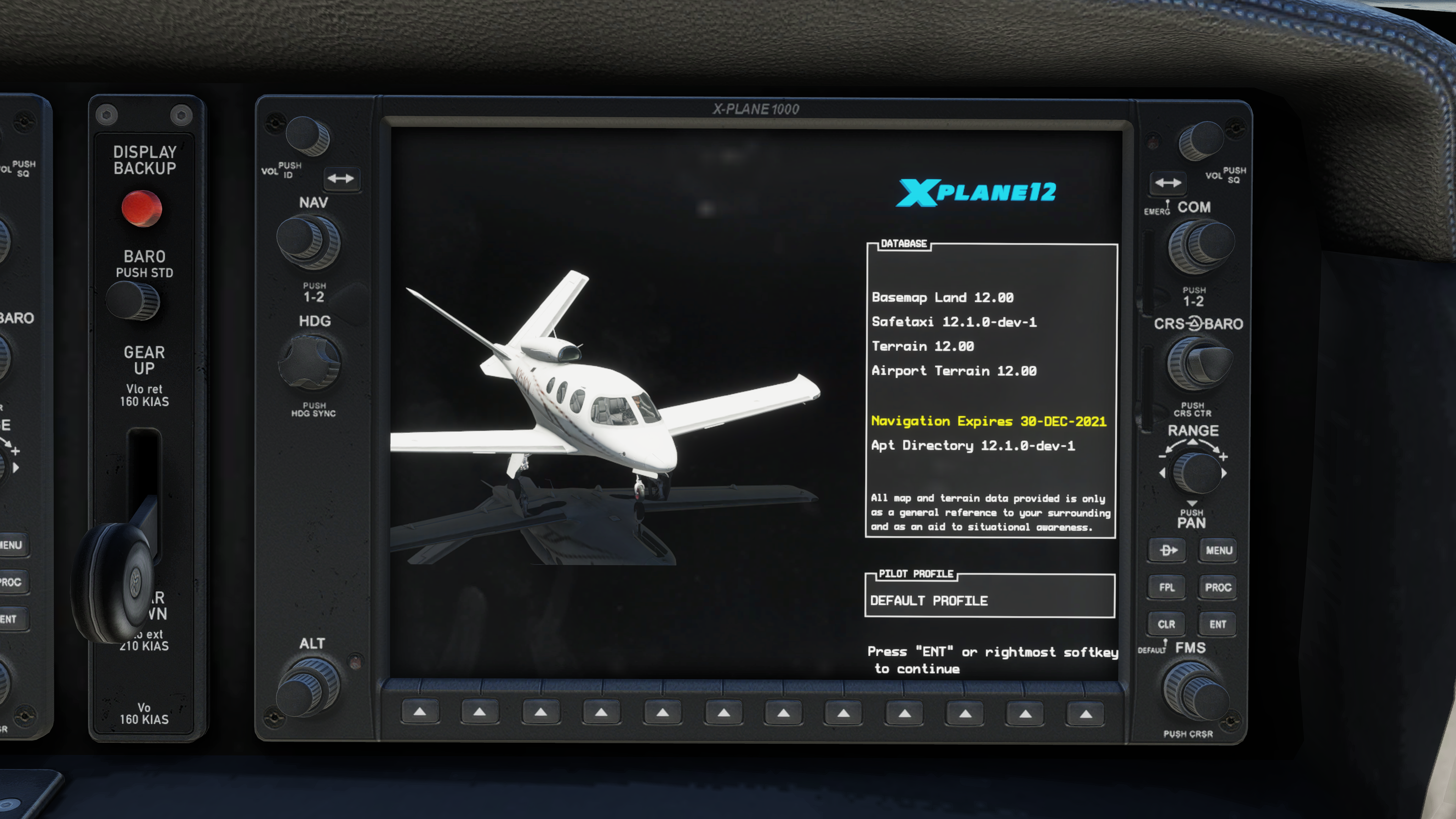
起動画面はKLMのBoeing 737に変更されましたが、起動時間は少し長くなった気がします。

バージョン情報を確認します。

設定画面を開くと、大きな変更点はあまりないようですが、RCAS設定をオンにして効果を確認してみます。ついでに新しいHUDも選択しました。

新しいHUDは、確かに以前よりも表示されるデータが大幅に増えており、実用性が高まっています。今後はHUDを使用する機会が増えるでしょう。


新しいバージョンでは、雲のレンダリング改善に多くの機能が注がれており、ユーザーの視点から見るとリアリティが若干向上しています。 また、光も以前のようなまぶしさではなくなり、機体を見る感覚も現実の印象により近づいています。

RCASは確かにシャープ化の効果があり、地上のシナリーがもやもやしていたのが改善され、鮮明度が増しました。観光飛行で景色を楽しむのに、より快適になりました。

最初は12.1.0のインストールに多少の抵抗感があり、bugが多くて不安定なのではないかと懸念していました。 しかし、しばらく飛行してみるとその心配はなく、虽然是beta版ですが、私の体験は非常に満足できるものでした。
-
X-Plane 12.1.0 (Beta 1) リリースノート
X-Plane 12.1.0 Beta 1がついにリリースされました。長いリリースノートを見ると、機能改善が本当にたくさんあります。 以下では、個人的に気になった内容を抜粋して翻訳します。
一般更新
- 雲は現在、ボクセルレベルで混合され、METARレベルではなくなり、ピラミッド、立方体、その他の目立つ形状の問題が修正されました。
- METARステーション近くの天気は、レバレッジ法ではなく、ソフト化されたボロノイ図を使用して混合されるため、空港でのMETAR条件がよりリアルになります。
- エンベロープ、モーメント、シミュレーション間の相互作用をスムーズにするために、内部コードを再構築しました。
- ダウンローダーが書き直され、現在の天気のダウンロードがより高速になりました。
- 新しい天気サーバーが有効になり、METARデータの弾力性が高まり、タグ付けされた古い天気を再生してデバッグできるようになりました。
ワールドスペースの雲の影
- この変更により、雲の影がSTR空間から、通常の影に似たワールドスペースに移動します。これにより、雲の影が天気ドメインから切り離されます。雲の影と世界間の登録が改善されました。
乱気流
- 乱気流システムが改善され、特に積乱雲の周囲でよりスムーズな体験を提供します。
着氷
- 複数の航空機(A330、B737、C90、Citation X)の着氷効果を更新しました。
- サーフェス法線と風向に基づく着氷。熱源がない場合でも、方向性のある着氷が追加されました。
- これには凍雨と氷があり、ランダムな熱逆転も着氷を引き起こす可能性があります。
- 重複する熱源のサポートが追加されました。
コントローラーサポート
- 完全なコントローラープロトコルのサポート
- 天気システムは、コントローラーを通じて雷雨ユニットを描画することをサポートしています
バグ修正
- IMCプリセットには層雲があり、IMCトレーニング中の乱気流を減らします
- 雲底はIMCへの移行を良くするために、より速く厚くなります
- 低い天井の天気条件下で雲底が高すぎるバグを修正しました
- 複数のMETAR解析の修正
- 天気図がグリッドGRIBデータをより正確に表示します
- デュアルスタックマシン上のTCP接続がIPv4をサポートするようになりました(コントローラーサポートに必要)
- 雲底のバグを修正しました
- 雲底を修正してより密にし、欠落している底部ボクセルを修正しました。これにより、雲底の状況がある程度改善されました
グラフィック
コアエンジン
- MSAAが選択されると、FXAAが常に有効になります
- MSAAがオンの場合、より高い品質を得るために、アルファテストサーフェスでカバレッジツーアルファを使用します
- MSAAの解像度はシーン参照になり、より良い視覚効果を提供します
- 被写界深度
- 設定メニューでRCASオプションが公開されました
- VRAMの圧力によってテクスチャが劣化する場合、設定メニューに通知が表示されます
- グラフ内のデータが増えるため、VRAMが改善され、グラフはメモリをより適切に割り当てることができます
- スムーズシャドウ
- 水面の雲の影
- レンダリンググラフの再ベイク時間が大幅に改善されました
- 雲の影の品質と大気散乱の品質が改善されました
稲妻
- 稲妻にわずかな色を追加しました
- 遠くの稲妻をわずかに薄くしました
- 近くの稲妻をわずかに太くしました
- 稲妻の開始部分を徐々にフェードアウトするようにしました
- 稲妻の溢れ出る光の範囲が大きすぎました
- 音の距離応答を改善しました
新しいパーティクル効果
- パーティクルエフェクトシステムは、地面に接触したときに表示されるパーティクルをサポートします
- パーティクルエフェクトエディタは、コピー/貼り付け機能をサポートするようになりました
- パーティクルエフェクトをサポートするための新しいデータ参照
- JATO(ジェット支援離陸)、消火、水爆撃、地面の擦過、ローターウォッシュを含む新しい組み込みエフェクト
- 必要に応じて新しいエフェクトを使用しないことを選択できる、ACFの上書きオプション
水体
- 水体の濁りモデルを修正しました:水体は常に完全に透明ではなくなりました。
- デフォルトの水体の色と透明度は場所によって変化します(例:SABE近くの水体は不透明で濁っていますが、MBPV近くの水体は透明なトルコ石色に近いです)。
- 雲の影は水体上ではっきりと見えます。
- 水体を使用するオルソフォトシーナリーパッケージのバグを修正しました。
自動生成
- ヨーロッパの高密度都市住宅の建築が改善されました
- 空港に駐機されている航空機の生成システムが改善されました。システムは、駐機スペースのサイズに基づいて、常に可能な最大の航空機を選択します。
システムとアビオニクス
G1000の機能強化
起動スプラッシュスクリーン
-
Yawman Arrow Handheld Controller
先日、新しいフライトシミュレータ用外装として「Yawman Arrow Handheld Controller」を購入しました。 使い心地はなかなか良いので、ここで簡単に紹介したいと思います。


まず、Yawman Arrow Handheld Controllerの製品サイトにある説明をChatGPT-4oで翻訳してみました:
フル機能ハンドヘルドコックピット Yawman Arrowは、従来のハンドヘルドゲームコントローラーと、様々な航空機における独特な飛行管制システムの融合です。 正確性と多機能性を実現するために、Arrowは従来のスティック、デスクトップスロットルコントロール、ラダーペダルなどの飛行操作を1つのハンドヘルドデバイスに統合しました。
フライトシミュレーション愛好家によって愛好家のために設計されたArrowは、ラップトップ、Androidタブレット、またはデスクトップシミュレーターにおけるメインコントローラーとなります。 Arrowは最新のシミュレーターに対応するために必要なものをすべて内蔵しており、コンパクトに設計されているため、いつでもどこでも飛行できます。
Arrowのサイズは、デスクトップでリラックスして使用したり、ソファでカジュアルに飛行したりするのに最適であり、機内持ち込み手荷物に簡単に収まるので、ラップトップやAndroidタブレットでの飛行に便利です。 大規模なハードウェア投資を望まないフライトシミュレーター愛好家にとって、この非常に多機能なArrowは理想的な選択肢です。
メカニカルリンクトリガー Arrow内部の特許技術は、直感的なラダー制御を実現し、メカニカルリンクトリガーにより、最も過酷な横風条件下での飛行も容易にします。 また、タクシングや離陸時の機動を可能にし、ヘリコプターの飛行では比類ない制御を提供します。
精密な制御 統合されたトリムホイールは飛行のリアリズムを最大限に高めます。その他、2つのショルダーバッファボタン、5ボタンの方向パッド、および独立したドローン視点制御用の5ウェイハットスイッチがあります。 デバイスには多機能な「6連」プログラマブルボタンも含まれており、オートパイロットやその他のシステムを制御するための無限の組み合わせが可能です。
7つの軸、21のボタン Arrowはピッチ、ロール、ヨーの精密な制御を提供し、合計7つの完全にプログラマブルなスライダーを含んでいます。その中には、いくつかの小型ピストン動力航空機にあるものに似た2つのヴァーニエ式エンジンコントロールが含まれます。 これらの操作は、大型ジェット機のスポイラーやスラストリバーバーにも非常に適しています。
互換性 Arrowは無限に設定可能なマルチボタン機能を持っていますが、私たちは様々なタイプの航空機のために推奨構成ファイルを開発しており、素早く離陸し、Yawman Arrowの機能を最大限に活用できます。Arrowのすべての機能は、最も近代的なPC用フライトシミュレーションプラットフォームとシームレスに連携するように設計されています。 Arrowは、PC用のMicrosoft Flight Simulator、Android用のInfinite Flight、PCおよびmacOS用のLaminar Research X-Plane、Lockheed Martin Prepar3D、DCS Worldなど、およびスティック操作をサポートする非シミュレーションゲームと完全に互換性があります。
米国製造 Yawmanは、設計、製造、および梱包を米国で行っていることに誇りを持っています。
YawmanのArrowコントローラーは、ポータブルおよびデスクトップフライトシミュレーションに正確性と多機能性をもたらします。 Arrowの特許設計は、複雑なコントロールヨーク、スロットルコントロール、メカニカルリンク式のラダーペダルを1つのハンドヘルドデバイスに統合しており、 ラップトップ、デスクトップ、Androidタブレットで使用できます。
Arrowは非常に多機能であり、フライトシミュレーター内での個人の好みに合わせてプログラムできます。 Arrowのシンプルさにより、デスクトップを整理された状態に保ちながら、数分間の飛行時間を楽しむことができます。 手軽に持ち運べるため、カフェ、飛行機の中、電車の中、またはホテルの部屋でもバーチャルフライトを楽しむことができます。 バーチャルリアリティフライトでは、Arrowは飛行体験に没頭させ続け、航空機とシミュレーターの機能を完全に制御できます。
タブレット互換性:Arrowは、Androidを実行するタブレットや携帯電話でInfinite Flightを使用することをサポートしています。 コントローラーの箱にはUSB-CからUSB-Aへの接続ケーブルが含まれていますが、デバイスの接続ポートに応じて、タブレットや携帯電話に接続するためのアダプターが必要になる場合があります。 Arrowは、iPadやiPhoneなどのiOSデバイスとは互換性がありません。
よくある質問(FAQ)を参照して、一般的な質問に対する答えを確認してください。ビジネスに関するお問い合わせや詳細については、[email protected]までお問い合わせください。
特徴:
- 統合トリムホイール
- 5ボタンの方向パッド
- 5ウェイハットスイッチ
- 2つのショルダーバッファボタン
- 2つのヴァーニア式エンジンコントロールスライダー
- 2つのパネルスライダー
- ペダルをシミュレートするメカニカルリンクトリガー
- 米国製造
互換性:
- PC用Microsoft Flight Simulator
- PC/Mac用X-Plane 11/12
- Android用Infinite Flight
- Prepar3D
- DCS World
Yawman ArrowをMacBook Proに接続し、X-Plane 12を起動します。
 続いて、各ボタンを設定します。
続いて、各ボタンを設定します。 -
ロサンゼルス スポッティング一日旅 - 飛行博物館、サンタモニカ空港、ロサンゼルス国際空港、ヴァン・ナイズ空港
コロナ禍以降、ほとんど飛行機を撮影しに出かけていませんでしたが、今回のゴールデンウィークにアメリカを訪れ、友人に案内してもらって1日で3つの空港を巡ってきました。
まず最初に、カリフォルニア州サンタモニカにある私立非営利航空宇宙博物館「Museum of Flying(フライング博物館)」へ行きました。 同館は1974年に設立され、2002年に一度閉鎖されましたが、2012年に新しい施設で再オープンしました。 ここでは航空史に関する展示が行われており、特に南カリフォルニア州のドナルド・ダグラスとダグラス・エアクラフト社に焦点を当てています。





サンタモニカ空港(IATA:SMO、ICAO:KSMO、FAA LID:SMO)は、アメリカカリフォルニア州サンタモニカ市に位置し、主にゼネラル・アビエーション(General Aviation)に使用されている、ロサンゼルス大都市圏の空港です。 アメリカで最も歴史ある空港のひとつであり、かつては世界で最も忙しい単一滑走路の空港のひとつで、世界有数のゼネラル・アビエーション空港でもあります。 同空港は太平洋(サンタモニカ湾)から約2マイル(3キロ)、ロサンゼルス国際空港の北から約6マイル(10キロ)の距離に位置しています。 米国連邦航空局(FAA)の2009年から2013年にかけての国家総合空港システム計画では、減圧空港として分類されています。 同空港は2028年末の閉鎖が予定されています。 サンタモニカ空港の敷地面積は215エーカー(87ヘクタール)です。
2016年に一度サンタモニカ空港に来たことがありますが、今回再び訪れてみると、閉鎖が近いためか、駐機されている機体はほとんどなく、空港全体がひっそりとしていました。




次に、ロサンゼルス国際空港の南側にある「Imperial Hill」へ移動しました。 この小さな公園は空港全体を見下ろしており、特に24番滑走路と25番滑走路を利用して離陸や着陸する飛行機を観察することができます。 ここにはベンチがあり、視界も開けているため、長時間の撮影や観賞に最適です。





その後、24R滑走路の近くにあるIn-N-Outバーガーへ移動しました。 20年以上前にカリフォルニアのシリコンバレーに出張した際にこのチェーン店のファンになりましたが、今回はハンバーガーではなく飛行機が主目的でした。





最後の目的地はヴァン・ナイズ空港(Van Nuys Airport)でした。 ヴァン・ナイズ空港(IATA:VNY、ICAO:KVNY、FAA LID:VNY)は、ロサンゼルス市のヴァン・ナイズ地区にある公共空港です。 同空港はロサンゼルス市の部門であるロサンゼルス世界空港局(LAWA)が運営しており、同局はロサンゼルス国際空港(LAX)も運営しています。 ヴァン・ナイズは世界で最も忙しいゼネラル・アビエーション空港のひとつであり、同空港の2本の平行滑走路では年平均230,000回以上の離着陸があります。 しかし、2022年時点で、ヴァン・ナイズには商業フライトはありません。
ヴァン・ナイズ空港は、ニュース、医療救助、観光ヘリコプターの事業者の拠点であり、ロサンゼルス市消防局の航空部隊、ロサンゼルス市警察、ロサンゼルル水力電力局のヘリコプターの整備基地でもあります。 当初は1928年12月17日に開場し、第二次世界大戦中はヴァン・ナイズ陸軍航空基地となりました。戦後、サン・フェルナンド・バレー空港と改名され、その後1957年に現在の名称に変更されました。





今回、3つの空港で撮影した写真をもとに、3本の4K動画を作成してYouTubeで共有しています。ぜひご覧ください。
-
XP12のA330離陸設定
<a href="/x-plane10/2024/04/minicockpit-minifcu. target="_self">miniFCU外付を使用するために、ここ数日X-Plane12のA330をおさらいしていました。 離陸設定に関するいくつかの問題について、簡単なメモを残します。
まず、アッパーECAMインフォメーションパネルを確認します。

そこで、Auto BrkをMaxに設定します。

スポイラーをプリセット(GND SPLRS ARM)に設定するには、レバーを上に引き上げる必要があります。

Flaps Config T.O.の設定は、FMCのProp(R3位置)にあります。設定に従ってフラップを下げます。

次は、T.O. Configボタンを押してテストを行います。

テスト中に"config pitch trim not in t.o. range"というエラーが表示された場合、 トリムを手動でアップ位置に設定する必要があります。

これで、ECAMインフォメーションパネルの文字表示がすべて緑色になりました。

-
miniCOCKPITのminiFCU周辺機器
数ヶ月前にminiCOCKPITで注文していたminiFCU(Flight Control Unit)がついに届き、すぐにX-Plane 12にインストールして試してみました。


まずは公式サイトでデバイスの登録を行い、1年間の保証サービスを受けられるようにしました。
最初にアドオンのインストールです。こちらの説明に従い、 X-Plane 12用のDLS miniCOCKPIT_mac_1.0.0.zipをダウンロードし、 そのアドオンをX-Planeのpluginディレクトリにコピーするだけです。 <a href="/x-plane10/2021/07/macosmacxpl. target="_self">MacOSでプラグインのMac.xplが起動しない問題があるため、同様にシステム設定のセキュリティ設定でMac.xplを許可する必要があります。
XPを使用する前に、デバイスのデモモードをテストしてみます。 SPD MACHボタンを押し続けた状態で、miniFCUにUSBケーブルを接続して給電すると、数秒後にデモモードに入ります。
 すべてのボタンとノブを試してみましたが、特にノブを押し込んで引き上げる際の触感がとても良く、大変満足しました。
すべてのボタンとノブを試してみましたが、特にノブを押し込んで引き上げる際の触感がとても良く、大変満足しました。次にX-Plane 12を起動して、アドオンメニューを確認します。
 miniCOCKPITが見つかり、“Hardware connected"と表示されているので、
デバイスの接続は問題ないようです。
“About miniCOCKPIT"をクリックすると、プラグインバージョンが1.0であることが確認でき、
miniCOCKPITが見つかり、“Hardware connected"と表示されているので、
デバイスの接続は問題ないようです。
“About miniCOCKPIT"をクリックすると、プラグインバージョンが1.0であることが確認でき、
 miniFCU周辺機器のファームウェアバージョンは20231102で、すべて正常です。
miniFCU周辺機器のファームウェアバージョンは20231102で、すべて正常です。miniFCUが対応している機種は以下の通りです: Toliss A319/320/321/340 series, FlightFactor A320, Default A330 (X-Plane 12), and Jardesign A320.
次にXP12のAirbus 330を選択すると、miniFCUとシミュレーターのFCUデータが自動的に同期されることが確認できました。
 では、簡単に飛行してみましょう。
では、簡単に飛行してみましょう。

滑走路から離陸した後、オートパイロットとオートスロットルをオンにし、その後約30分間飛行しました。 速度、高度、針路、上昇、降下、水平飛行といくと、基本機能において特に変わったところはなく、使用感はとても快適でした。
また、miniFCUのEXPEDボタンについてですが、公式サイトにEXPEDite機能の紹介があるので、参考にしてください。
EXPEDボタンはエアバス社が提供するオプション機能で、パイロットはボタンを押すだけで一時的に上昇または降下率を増加させることができます。上昇中にEXPEDiteモードを有効にすると、機体はグリーンドット速度(最良の揚抗比を持つ低速)で空を翔けます。グリーンドット速度は高度の上昇に伴って増加するため、25000フィート以上でのEXPEDによる上昇は推奨されません(失速速度に近づきすぎるため)。
FSボタンとLSボタンはあまり使用しないと感じたため、自分はデフォルト設定のまま、つまり通常のALTボタン機能として使用しています。降下中にEXPEDボタンを押すと、アドレナリンが迸る高速降下が解放されます。機体は速度目標を0.80マッハまたは340kt(高い方)に変更し、極めて高速で高度を失うことができ、運動エネルギー(速度の獲得)を位置エネルギー(高度の低下)に交換します。これはまるで空を駆け抜けるスリル満点のジェットコースターに乗っているような体験です!したがって、急降下や高高度上昇のスリルを味わいたい場合、EXPEDボタンはあなたの武器庫における完璧なツールです。
しかし実際には、この機能はめったに使用されません(パイロットは単に速度ノブを使用して同じ目的を達成します)。そのため、miniFCUでは、FSやLSなどの他のより一般的な機能と交換できるように設計されています。
少し前に断捨離をして、場所を取るSaitekの機材はほぼすべて売却しました。 miniFCUのようなコンパクトな製品は自分のニーズにピッタリであり、今後10年間は手放すことはないでしょう。
miniFCUの主な特徴: 18年以上の経験と15,000時間以上の飛行経験を持つ2人のエアバス機長によって開発されたminiFCUは、エアバス機の実際のFlight Control Unitと同じ外観と制御メカニズムを備え、リアルで没入感のある体験を提供します。 私たちの使命は、品質やリアリズムを一切妥協することなく、誰もが手軽に入手できる手頃な価格のフライトシミュレーションハードウェアを開発することです。
- リアルなパフォーマンス:象徴的なプッシュ/プルノブやカスタムLCDを含め、miniFCUは象徴的なAirbusTM FCUに触発された正確なレプリカであり、リアルな操作体験を提供します。
- 80%のポータブルサイズ:miniFCUのコンパクトなサイズにより、あらゆるゲーマーの現在の設定に容易に統合できます。
- 手頃な価格:miniFCUは市場で最も正確な消費者向けオートパイロットフライトコントローラーの1つであるだけでなく、最も安価な選択肢の一つです!非常に手頃な価格を提供しています。
- 統合が容易:miniFCUは、MSFSのデフォルトA320、FBW A320、XP11/XP12のToliss、FlightFactor、Jardesignなど、様々なフライトシミュレーターと互換性があります。今後、さらに多くの対応機種が登場します!
- 機能の拡張:miniFCUは単体の製品ではなく、miniEFISやminiECAMを含むシリーズの一部です。さらに多くの機能が、あなたの夢のシミュレーションコックピットを拡張し続けます。
-
衛星通信におけるACARSについて
10年前の古い記事<a href="/x-plane10/2014/03/acars. target="_blank">個人でACARS信号を受信する方法についてでは、VHFのACARS信号の受信について紹介しましたが、 衛星通信(SATCOM)におけるACARSはどのようなものか、少し資料を調べてみました。
まず、マレーシア航空MH370便失踪事件のWikipediaページを見てみると、 衛星通信に関する情報は以下の通りです:
飛行時間01:30 Inmarsat-3 F1衛星が7つのハンドシェイク信号の最初のものを受信 飛行時間07:30 Inmarsat-3 F1衛星が航空機のACARSから発せられた最後の完全なハンドシェイク信号を捕捉し、この時点でもまだ飛行中であったことを示している 飛行時間07:38 予定外、航空機から発せられた説明不能の「部分的ハンドシェイク」信号を通じて、運用手順で確保されている到着後の残留燃料はほとんど残っていないはず 飛行時間08:34 Inmarsatが予定していた次回のハンドシェイク時間に航空機からの応答がなかった
Inmarsatは国際海事衛星機構のことで、同様にWikipediaでInmarsatが提供する衛星サービスを見ることができます:
 Inmarsat-3 F1衛星のカバレッジ範囲はインド洋地域で、打ち上げ日は1996年4月3日、すでに28年間宇宙で運用されています。
Inmarsat-3 F1衛星のカバレッジ範囲はインド洋地域で、打ち上げ日は1996年4月3日、すでに28年間宇宙で運用されています。ネット上で良い資料が見つかったので、以下ではACARSの様々な通信方式をまとめ、 通信媒体、変調方式、伝送速度、伝送データ単位、誤り訂正機能の有無、アクセス方式、およびプロトコルを表にして参考にします。
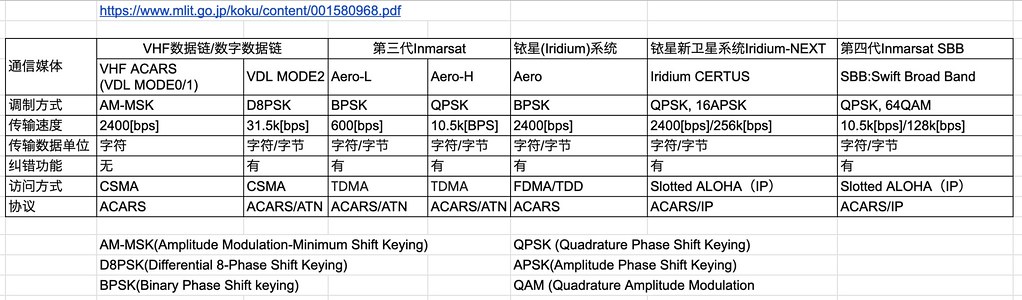 また、IPベースの航空機通信アドレッシング・報告システム(ACARS OVER IP)は、今後主流になるでしょう。
また、IPベースの航空機通信アドレッシング・報告システム(ACARS OVER IP)は、今後主流になるでしょう。また、satbeams.comの資料によると、10年前にマレーシア航空失踪機の信号を検知した第3世代Inmarsat衛星Inmarsat-3 F1はすでに退役しており、
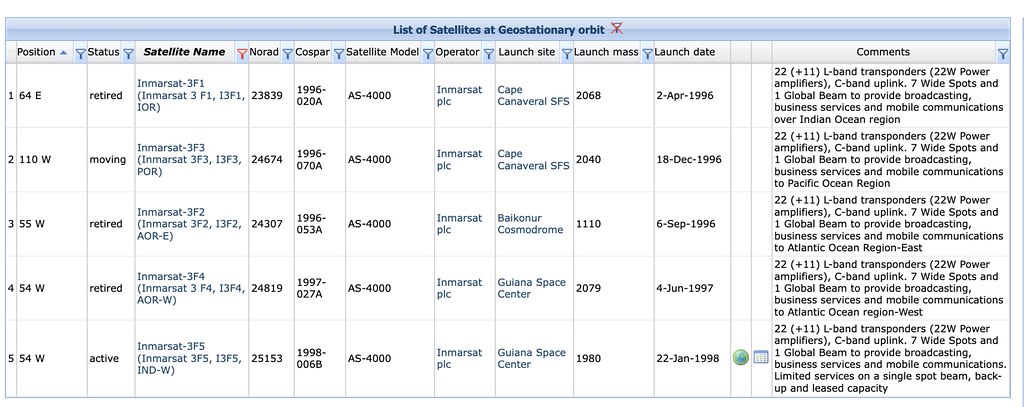 Inmarsat-3F5、Inmarsat-4F1、Inmarsat-4F2、Inmarsat-4F3などが現在運用中です。
Inmarsat-3F5、Inmarsat-4F1、Inmarsat-4F2、Inmarsat-4F3などが現在運用中です。

アマチュア愛好家としてどのように衛星信号を受信すればよいのでしょうか? 現在、手元に衛星アンテナもLバンドの受信機もないので、実践はせず、資料を調べるだけにしておきます。
周波数については、UHF-Satcomウェブサイトの資料を見ると、 ここでは多くの情報が見つかります。例えば、インド洋をカバーするInmarsat-3 F1は以下の通りです:
 現在、アジア太平洋地域をカバーするInmarsat-4 F1は以下の通りです:
現在、アジア太平洋地域をカバーするInmarsat-4 F1は以下の通りです:

Inmarsat-4 F1の軌道はN2YOで見つけることができます。

ネット上には愛好家が衛星信号を受信する紹介が多くありますので、以下にいくつかのリンクを示します。 今後時間と余裕があれば、自分でもやってみるかもしれません。
- 1550MHz Active Inmarsat Antenna Bundle - Includes SAWbird+ iO LNA & Filter Module, High Gain (3.5dBi) 1550MHz Patch Antenna, SMA DC Block, Cables & Adapters
- Basic's to decoding Inmarsat L-Band signals using the RSP SDR
- Exploring L Band with SDRuno
- JAERO A program to demodulate and decode Classic Aero SatCom ACARS signals
- Inmarsat Aero
- How To Decode L band Satellite ACARS and CPDLC messages with JAERO and your SDR
- ACARSデータを収集する愛好家グループAirframes
- FEEDING ACARS DATA TO AIRFRAMES.IO
- SatnogsのInmarsat-4 F1 Observation
その他のリンク
-
12.1.0の詳細説明
皆様ご存知の通り、X-Planeチームはかつてないスピードで成長しています。 その結果の一つとして、X-Planeの体験のより多くの側面をカバーする、より多くの更新内容を含む大型アップデートが可能となり、12.1.0も例外ではありません!
当初はグラフィックを重視したバージョンとして始まりましたが、私たちのチームは新しい航空機システム、飛行モデルの改良、天候、ATCシステムの改良、X-Plane Professional版への拡張、そしてまるで実際に航空機に乗って移動しているかのような感覚をもたらす物理ベースのカメラも実装しました。 このバージョンは現在内部テスト中であり、できるだけ早くパブリックベータ版としてリリースされることを楽しみにしています。

期待できる内容は以下の通りです:
グラフィック - 12.1.0バージョンでの重点項目
- 水面への雲の影の投影
- ブルーム(溢光)照明効果 ブルームとは、超過酷な光源が画像の周囲の部分に「浸透」するグラフィック効果のことで、通常、太陽の周囲や航空機のライトの周囲で、すべての環境の明るさで観察することができます。
- RCAS(ロバスト・コントラスト適応型シャープニング)
- より滑らかでジャギーのない地上の影
- マルチサンプリングアンチエイリアシング(MSAA)の改善 MSAA解像度は現在、測光学的に正しくなりました MSAAのアルファクリッピングテクスチャ MSAA + FXAAの組み合わせ これは、X-Plane 12のアンチエイリアシングオプションを改善するための最初のステップです
- 新しい「モダンコレクター」によるCPUパフォーマンスの向上 このコードは、シミュレーターが任意の瞬間に描画する必要のあるシーンを決定するために使用されます
- より良い水の透明度と濁度 多くの場合、船の底が見えなくなります
- 被写界深度と露出をリアルタイムで制御できる新しいスクリーンショットツール






新しいパーティクル効果
- 路面への衝突による火花
- 航空機のタイヤやエンジンがまき上げる地上の水しぶき
- ヘリコプターの飛行/離陸時の航空機による褐色/白色の尾流





航空機システム
- G1000への追加機能 – ADS-B シミュレーション – ストームレーダーページ – トラフィックマップページ – 空港METARマーカー – NDB + VOR ページ – WAAS/テスト衛星コンステレーション – 起動時のオーバーレイ – (SVSは現在進行中であり、近い将来リリースされる予定ですが、12.1.0には含まれません)
- G1000アドオンの相互運用性 – 当社のG1000は、サードパーティが特定の航空機のニーズに合わせて変更しやすくなりました
- アドオンによるグラスコックピット化 – このAPIコードにより、サードパーティの開発者はカスタムグラスコックピットを航空機に統合しやすくなります
- STEC ST-360 オートパイロット




飛行モデル
-
今後の12.1.0および12.2.0バージョンについて
公式サイトにて、バージョン12.1.0および12.2.0の開発計画が公開されましたので、以下に翻訳いたします。
ストアに関する2つの簡単な補足:
モントリアルでX-Planeストアの計画を発表しました。Dellanieが素晴らしいFAQを作成していますが、開発者の皆様に向けて、私が強調しておきたいポイントが2つあります:
-
X-Planeをロックダウンすることはありません。皆さんがそう考えるのも無理はありません。iPhoneアプリストアは、(1)アプリ内課金を行う非常に目立つ手段であり、(2)iPhone自体がクローズドされているからです。しかし、私たちはそのようなことはしません。これまで通り、すべてのものをX-Planeにインポートする方法が有効です。アドオンのインストーラーやフォルダのドラッグ&ドロップなども含みます。ストア経由での購入は必須ではなく、既存のすべての作業方法は引き続き有効です。無料のソフトウェアに対して料金を支払ったり、何かを買い直したりする必要はありません。
-
常時接続を要求することはありません。現在のポリシーでは、オンラインライセンス(“XDDキー”)をお持ちの場合、更新のために2週間ごとにログインする必要があります。私たちは「常時接続」モデルには移行しません。これは多くのユーザーにとって不可能であると認識しており、この「時折キーを更新する」というポリシーを維持することが必要だと考えているからです。
今後の計画:12.1.0 と 12.2.0
現在、2つの「メジャーアップデート」を計画しています:
12.1.0 は次のバージョンで、主にグラフィックのアップデートです。RCAS、ブルーム、被写界深度、シャドウのソフト化、雲の影の修正、新しいデカールなど、お分かりいただけるかと思います。このアップデートでは、Real Weatherのバグ修正も行われ、新しいReal Weatherサーバーへ移行します。
12.2.0 は 12.1.0 の後にリリースされる予定で、主に飛行モデルのアップデートです。これには、Austinによるプロペラブレードの動力学、失速、乱気流などの進展が含まれます。
これら2つのバージョンには他にも多くの内容が含まれており、どちらも大型パッチとなります。グラフィックと飛行モデルの区別を明記したのは、テストの範囲を管理するための意図的なものです。
今月中に 12.1.0 をプライベートテストの段階に入れることを目指しています。
ドキュメントの更新状況はどうですか?
地球上の3人しか気にしていないかもしれませんが、10年(いわゆる「恥の徒歩」)を経て、.netファイルフォーマット仕様の更新を余儀なくされました。もしこれに興味があるなら、遅れたことと、これから味わうであろう苦痛に対してお詫び申し上げます。X-Planeの路景ファイルフォーマットは非常に複雑であり、実際には誰にもそれを解析しようとはお勧めしませんが、秘密にされているわけではありません。
ランドスケープ:現在と未来
水体とオルソ画像(正射画像)の問題に取り組んでおり、12.1.0で完了することを期待しています。また、ゲートウェイ空港の境界や滑走路の変動の問題を解決するために、DSFの再カットを行います(12.1.0で hopefully ですが、12.2.0になる可能性もあります)。
モントリアルでは、X-Planeのランドスケープシステムの将来について少し話しましたが、それを説明するには別のブログ記事が必要なほど複雑な内容です。
-
-
X-Planeストアのご紹介
X-Plane公式ウェブサイトで、近日中に登場する「X-Planeストア」機能が紹介されました。これはユーザーがアドオンを管理する面倒な操作を省くことができる大きなニュースであり、非常に期待されます。
Introducing: The X-Plane Store
以下にChatGPTを使って原文を翻訳します。使用したプロンプトは以下の通りです。
あなたはプロの中日翻訳者です。質問者に提示し、質問の英語を中国語に翻訳してください。翻訳プロセスは2段階です。最初に直訳で翻訳し、次に直訳結果を自然な中国語で意訳します。
ご紹介:X-Planeストア!
私たちは、開発者がアプリケーション内で直接ユーザーに製品を販売できるマーケットプレイスを作成することで、X-Planeのアドオン体験を新たなレベルへと引き上げています。 このプラットフォームは、ユーザーによるX-Planeコンテンツの購入体験を簡素化し、開発者がプラットフォームのために素晴らしい作業を続けられるようにします。 以下に、これがユーザーにとって何を意味するのか、そしてインターネット上で見かけたよくある質問への回答を簡単にまとめました。
ユーザーにとっての意味:
- オンラインショッピングとX-Planeアプリ内での購入体験が簡素化されました。
- アカウントインフラにより、購入した製品が紛失することを防ぎます(もうアクティベーションキーは不要です!)。
- すべての製品には透明性のあるレビューが付きまます。
- 製品のダウンロード、インストール、更新がX-Plane内で自動的に行われます(もうあちこちでZipファイルを処理する必要はありません)。
- 高品質と安全性を確保するために、すべてのアドオンに対して厳格な品質審査を行います。
- バージョン互換性によるフィルタリング。
- シンプルで安全な支払い方法。
開発者にとっての意味:
- 製品の露出度の向上とコンバージョン率の向上。
- 航空機やアドオン(おそらくシーナリーも、現在作業中です)に無料で提供される、組み込みのデジタル著作権管理システム。
- 製品の受け入れ基準とサポートに関する期待事項に関する明確なガイドライン。
よくある質問(FAQ)
Q: X-Planeストアはいつ利用可能になりますか? A: 2024年に発売を計画しています。たぶん第3四半期になると思いますが、ユーザー体験の品質が最終的な判断材料となります。
Q: X-Planeをロック(締め出し)しますか?(すべてのアドオンはストアからのものでなければなりませんか?) A: いいえ!絶対にありません!X-Planeは、これまで通りストア以外のアドオンも読み込み続けます。 この点を強調しておきたいと思います:私たちはX-Planeをロックしません。モントリオールで、オースティンは「変更可能性」(X-Planeを変更し、その内部を探求する能力であって、海賊版のような「ハッキング」ではない)はX-Planeの中核的な価値観であると語りました;その場にいたほぼ全員が、内部を探求し、変更を加え、アドオンを追加することからX-Planeを始めており、私たちはそれを変えるつもりはありません。 基本的に:ストアは、アドオンの購入とインストールに優れたユーザー体験を提供する新機能ですが、既存の機能を削除するものではありません。したがって、ストアの影響を受けないため、既存のアドオンは引き続き「正常に動作」します。
Q: 私の既存のアドオンは引き続き使用できますか? A: はい!サードパーティのアドオンが読み込まれるのを妨げたり、サードパーティがアドオンをインストールして実行することを可能にする機能を削除したりすることはありません。
Q: 無料のアドオンは引き続き使用できますか? A: はい!これまで通り、シーナリーパッケージ、航空機、アドオンを読み込みます - アドオンがストアのアドオンでない場合、これまで通り読み込まれます。
Q: X-Planeストアで販売する著者は、ストアでの販売に独占的にする必要がありますか? A: いいえ!私たちのストアで販売する際に独占契約に署名することは要求しません。
Q: 誰でもストアで販売できますか? A: X-Planeストアでの販売は、私たちの受け入れ基準を満たすすべての著者に対して開放されます!ストアには品質管理プロセスが設けられ、顧客体験を第一に考え、販売可能なコンテンツを明確にガイドします。
Q: 他のストアで購入した製品はここに移管されますか? A: 開発中ではありますが、開発者が選択した場合に既存の購入記録を移行するのを支援するユーティリティの提供を計画しています 🙂
Q: SASL/Gizmoなどの暗号化を含むアドオンはまだ使用できますか? A: はい - 他のアドオンやアドオンコンポーネントと同様に、これらのツールは引き続き正常に機能します。SASL/Gizmo搭載航空機の開発者が私たちのストアで製品を販売し、その結果として私たちのデジタル著作権管理システムを使用する場合、それに適応するためにプラグインに小さな変更を行う必要があります。
Q: .org/x-aviationやその他のサプライヤーを淘汰(廃止)させますか? A: いいえ!プロジェクトの開始当初から、私たちは競争を抑制しないように設計上の選択をしてきました。実際、私たちは競争を歓迎します!
Q: アプリケーションに商用コンポーネントができたため、X-Planeは狂ったような広告市場になりますか? A: まさか!絶対にありません!それはまさに、優れたユーザー体験の真逆であると私たちが考えるものです。
-
分類
-
歸檔
-
半年ぶりの羽田空港第2ターミナル
今年の夏は高温が3〜4ヶ月も続き、出かけて写真を撮る気力がなく、3ヶ月以上カメラを触っていませんでした。 10月に入ってようやく少し涼しくなったので、土曜日に羽田空港へ散歩に出かけました。 相変わらず展望台には航空ファンが多く集まっていましたが、 ミラーレス一眼カメラが主流となり、私のような一眼レフユーザーは少数派になってしまいました。
 今日の一番のサプライズは、Hawker Beechcraft 350i King Air (B300) でした。
羽田にこれほど小さなプロペラ機が来るのは、本当に珍しい客です。
今日の一番のサプライズは、Hawker Beechcraft 350i King Air (B300) でした。
羽田にこれほど小さなプロペラ機が来るのは、本当に珍しい客です。
 東京ディズニーランド40周年記念の特別塗装機は今回が初見です。
構図として、東京ディズニーランドとこの Boeing 767 を一緒にフレームに収められたのも悪くありません。
東京ディズニーランド40周年記念の特別塗装機は今回が初見です。
構図として、東京ディズニーランドとこの Boeing 767 を一緒にフレームに収められたのも悪くありません。
空港の風景



















久しぶりの撮影で、写真の編集作業もずいぶん手間取ってしまいました。 とりあえず何枚かアップして、どんな感じか見てみましょう。
-
X-Plane 12.0.8の機能、12.1.0の展望、そして価格改定の計画
Coming in X-Plane 12.0.8 and beyond - Roadmap Update
私たちのチームは現在、X-Plane 12.0.8のベータ版の準備を進めています - 1、2週間以内に何か準備できるものができくる見込みです。 今回のアップデートは主に、X-Planeのフライトモデル(シミュレーション内で航空機が実際に飛行する方法を決定する数学モデル)、ネットワーク/マルチモニター、およびプロジェクターでのX-Plane使用のためのツールの改善に焦点を当てています。
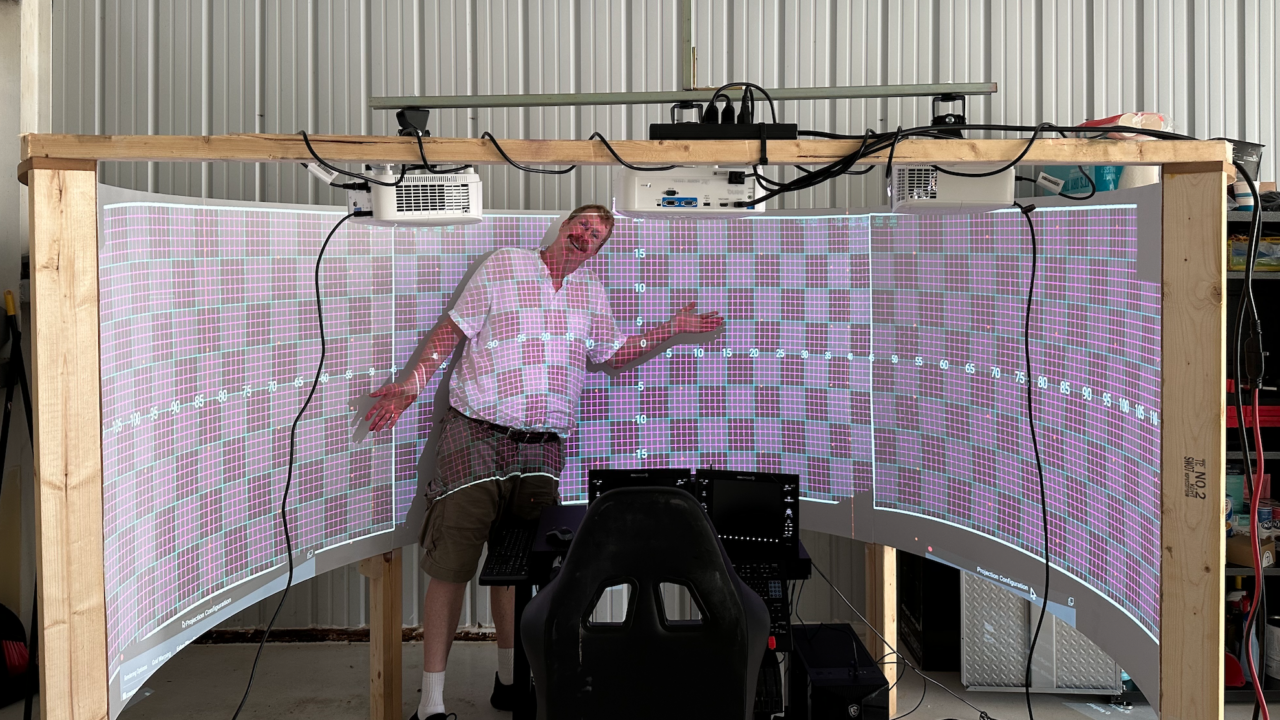
プロジェクター補正/ブレンディング 周囲の世界を表示するために複数のプロジェクターを使用することは、フライトシミュレーションの黄金标准です。 しかし問題があります - 曲面スクリーンに複数のプロジェクターを向けると、各プロジェクターの画像が奇妙に歪んで見えてしまいます。 私たちは、プロジェクター自体に送信されるX-Planeのピクセルを並べ替えることでこの問題を解決します - これにより、視覚的に正しい画像が生成されます。 舞台裏では、様々な三角法と計算によってこれを支えていますが、最終的なユーザーはメッシュパターンをディスプレイに合わせるだけで、準備完了です! この機能は、X-Planeのプロフェッショナルライセンスで利用可能になります。
エンジンモデルの改善 Austinは、X-Planeのシミュレーションエンジンのパフォーマンスの方法について、様々な改善を行いました。 現在、ジェット機、ターボプロップ、およびレシプロエンジンは、リアルなテストデータに基づいてより正確にシミュレートされています。 私たちは、すべてが「正確无误(ピンポイント)」に動作することを保証するために、Pratt & WhitneyとPhilipp Ringlerのデータを使用しました。😉

脚物理学 脚と地面の相互作用を定義する数学モデルは、3つの重要な点でよりリアルになりました:
ホイール慣性 - これはよりスムーズな着陸を意味します。やりましたね!航空機の主脚のタイヤは、着陸後に航空機の速度により早く達するようになり、着陸滑走中の前脚の沈み込み/衝撃が軽減されます。
グリップモデリング - このコードは、各車輪の回転と停止の間の移行を制御します。これは些細なことのように聞こえるかもしれませんが、航空機の駐機と非駐機、および低速タキシングのすべての移行に関わるため、これが正しいことを確認することが非常に重要です!
ABS改定 - 着陸後の減速時のX-Planeのアンチロックブレーキシステムのロジックが微調整され、過度のスキッド音を回避するようになりました。

新しい燃料温度モデル ご存知でしたか?ジェット機は実際にはオイルを冷やすために燃料を使っているのです。 それが、あなたの古いセスナ172のような見えるオイルクーラーがない理由です! オイルが燃料を加熱し、燃料は翼の表面を通して熱を放出するのです! したがって、実際には、ジェット機はラジエーターとして翼を使用しています。
現在、このプロセスはX-Plane 12で完全にシミュレートされています。 データ出力画面で燃料温度の詳細を確認して、お気に入りのジェット機への影響を確認してください。
ネットワークおよび外部ビジュアル同期 ……複数のコンピュータを使用して複数のディスプレイを駆動する設定でX-Planeを使用する際のエクスペリエンスを改善するために、一連のバグ修正が行われました。
グラフィック品質のバグ修正 12.0.8バージョンは主にX-Planeの物理的側面に焦点を当てていますが、グラフィックチームは緊急の問題を解決するために2つのクイック修正を含めました:
最も一般的な「VRAM完全超過」のクラッシュ問題が解決されました ユーザーは、ポップアップが表示されるときに長時間のフリーズに遭遇しなくなるはずです
次は:X-Plane 12.1.0(グラフィック方面!) 12.1.0バージョンは、過去数ヶ月間にわたってグラフィックチームが開発してきた楽しい機能を統合するために計画されているリリースバージョンです。以下の内容が期待できます:
リアルウェザーの改善 リアルウェザーを有効にすると、四角い「マインクラフト」のような雲の形が表示されなくなります。
水上の雲の影 より良い波の照明効果 RCAS(Robust Contrast Adaptative Sharpening、堅牢なコントラスト適応型シャープニング) より滑らかで、ギザギザの少ない地面の影 MSAA(マルチサンプリングアンチエイリアス)の改善 測光学的に正しいMSAA解像度 アルファクリッピングテクスチャに対するMSAAの改善 CPUパフォーマンスの改善 私たちの新しい「モダンコレクター」のおかげです - これはシミュレーターが描画に必要なすべてのシーナリーを見つけるために使用するコードです。現在、多くのユーザーがX-PlaneでCPUの制限を受けていることを私たちは知っており、これはシミュレーターでの彼らのエクスペリエンスを改善する第一歩です。
-
X-Plane 12.06の多くの新機能
X-Plane 12.06 Is Full of Many Things 内容はまだChatGPTの英中翻訳で完成したものです。
アップグレード後にテストしてみました。
 新しい雲には非常に満足しています。リアルな雲に近く表示され、パフォーマンスも良好で、フレームレートの低下も全くありません。
新しい雲には非常に満足しています。リアルな雲に近く表示され、パフォーマンスも良好で、フレームレートの低下も全くありません。雲と天気 X-Plane 12.0のリリース以来、私たちは雲と天気システムのパフォーマンス、正確性、そして品質の向上に取り組んでいます。12.06バージョンでは、この多段階プロセスの最初の2つの段階が実装されました:
雲のシェーダーはより高速になり、アーティファクト(ノイズなど)も低減されました。ダニエルが雲の推進方法を書き直し、縞模様(ゼブラストライプ)の問題を修正し、全体的に画面をあまりピクセル化せず、見苦しくないようにしました。 雲のシェーダーには、巻雲専用のパスも含まれており、12.0バージョンにあった巻層雲(「上空の非常に薄い層状の雲」)よりも良く見えるはずです。 私とアレックスは、より良い見た目の様々な雲を得るために、天気の種類ごとのノイズ関数を再構築しました。
いくつかのリアルウェザーの修正が含まれていますが、リアルウェザーの全面的な更新は行っていません。私の考えでは、適切なレンダリングがなければ、リアルウェザーが本当に改善されたかどうかを確認することはできません。
今後の機能:ベータ2では、「マインクラフトスタイルの雲」(例えば、特にリアルウェザーでのブロック状の立方体の雲)が修正される予定ですので、まだ使えるうちに楽しんでください。重厚なプリズム状の巻雲も修正され、プリセットとMETAR解析の最適化を行います。
将来の展望:3Dの雲の後ろに2Dの「雲の殻」を追加して、軌道ビュー(Orbit View)を処理し、地球があまり奇妙に見えないようにする予定です。また、リアルウェザーの詳細なチェックと最適化を行います。
ライティング X-Plane 12.06では、空の色の定数の一部が修正されましたが、ライティングの更新ではありません。内部では一連のライティング修正を行っていますが、計画では慎重に進め、すべての変更が完了してから一度にライティングを更新するという方針です。
暗いコックピットの改善は、私たちの優先事項リスト(To-Do List)の上位にありますが、コックピット内の光のレベルを何度も調整したくもありません。そうすることはサードパーティの開発者に影響を与えるからです。
コックピットのライティングを再校正する際、一部の航空機で軽微な更新が必要になると思われますが、明るさを独自に「修正」することを選択した(追加の光源を追加したり、マテリアルを改ざんしたりした)サードパーティの開発者は、それらの修正を元に戻す必要があるかもしれません。その段階に達したとき、明確なガイダンスと初期バージョンを提供するようにしますが、ライティングはまだ「開発中」の状態です。
レンダリングとVRAM X-Plane 12.06の最大の変更点は、あなたが見えるものではありません:メインのレンダリングパイプラインを12.0(手動コーディングされたもの)からレンダリングノードグラフに変換しました。
レンダリンググラフは現在最も一般的であり、興味があればAMDのレンダリングパイプラインシェーダーのようなものを確認できます。 しかし、なぜこの変更を行ったのかというと: レンダリンググラフにより、メインフレームのレンダリング中にVRAMの一部を予約できるようになります。X-Plane 12のレンダリングパイプラインはX-Plane 11よりもはるかに複雑であり、これによりVRAMの使用量が増加していました。
12.06では、VRAMをAirBnB(短期賃貸)のように、2番目の家のように扱っています。フレームの異なる時間に、レンダリングパイプラインの異なる部分が同じVRAMブロックを使用するため、エフェクトに必要なVRAMの合計量が少なくなります。この変更はX-Plane 11では不可能でした - OpenGLを使用してVRAMを繰り返し予約することはできません。
しかし、手動でコーディングしてエイリアスを割り当てることは非常に面倒です - レンダリングノードグラフはこのプロセスの大部分を自動化し、エラーを防ぎます。
今後の機能:ベータ2では、CPUに制約のあるユーザーに役立つパフォーマンスの最適化があります。
将来の展望:将来的には、レンダリングノードグラフにより、異なるCPUコアを使用してフレームの異なる部分をレンダリングし、CPU利用率を向上させ、CPUに制約のあるユーザーのフレームレートを高めることができるようになります。この点ではまだやるべきことがたくさんありますが、レンダリングノードグラフによってこれが可能になります。
ATCとAI航空機 12.06バージョンには多くのATCの改善が含まれています - ジムによる数ヶ月の作業がベータ1でリリースされました。ジムには詳細についてのブログ記事を書いてもらうようにします。
ATCの大きな改善の1つ:オースティンが多くのAIパイロットの問題を修正しました。これはATCに影響します。なぜなら、AI航空機の飛行がより信頼性が高くなり、墜落する可能性が低くなり、それによって空港の運航が停滞するのを防ぐからです。安定性が改善されると予想しています。AI航空機の墜落による数値的不安定性が原因で、シミュレーター全体がクラッシュすることがあったためです。
将来の展望:ジムは引き続きATCの修正を行い、SID/STARのサポートに取り組みます。
開発プロセスの次の内容 X-Planeの開発はプロセスに従って進行します。私がこれらを入力している間…
12.05バージョンがリリースされました。 12.06b1バージョンは公開テスト段階にあります。 12.06b2バージョンは内部テストを行っており、公開テストの準備をしています。 12.06b3バージョンは開発中です - ベータ3の問題の約半分が解決されており、残りの問題を処理しています。 12.07バージョンの開発はほぼ完了しています - 現在、開発とテストの混合段階です。 12.08以降の機能の開発に着手しています。
サードパーティの開発者の皆様:既知のサードパーティの互換性の問題はすべてベータ3で解決される予定であると確信していますが、その大部分はすでに修正されています。しかし、これらの修正はベータ2に間に合いませんでした。それは数日前のことです。来週の初めにベータ3をリリースすることを希望しています。
私たちは、準備がほぼ整った修正のためにテスト版のリリースを遅らせないようにしています - もしそうすれば、いつでも準備ほぼ整った修正があるため、テスト版は永遠にリリースされないからです。
将来の展望:パベルはネットワークスタックの改善に尽力しており、彼の最初の変更は主にプロフェッショナルユーザー向けですが、12.07バージョンでリリースされます。さらに多くのグラフィックの改善がまもなく登場し、オースティンの飛行モデルの改善もテスト中です。
最後に、私のテスト画面のコピーをいくつか貼り付けます。参考までにしてください。




-
X-Plane12 A330 パイロット・オペレーション・ハンドブック 5
チェックリスト
以下のチェックリストは、シミュレーターパイロットのために作成されたものであり、X-Plane A330-300機に合わせてカスタマイズされています。これらは実機のチェックリストとは異なります。
Cold and Dark to Engine Start (コールド&ダーク状態からエンジン始動) 以下のチェックリストは実機の手順のサブセットであり、コールド&ダーク状態からエンジン始動までに必要な基本手順のみを含んでいます: PARKING BRAKE - ON
TRANSPONDER - STANDBY
BAT1 - ON BAT2 - ON
(EXTERNAL POWER) EXTA - ON BEACON - ON NAV LIGHTS - ON
APU BATTERY ON APU MASTER - ON APU - START
APUの始動を待ちます(APU AVAILが表示されます)
APU GENERATOR - ON
(EXTERNAL POWER) EXTA - OFF
ADIRS IR1 / IR2 / IR3 - ON ADR1 / ADR2 / ADR3 - ON ADIRS Rotaries - NAV
-
X-Plane12 A330 取扱説明書 4
Glareshield Panel(グライアシールドパネル)

Annunciator Panel(アニュンシエーターパネル) MASTER WARNING(マスターウォーニング):レベル3の深刻度の警告を示すために点滅します。クルーは警告を解除する必要があります。 MASTER CAUTION(マスーターション):レベル2の深刻度の注意を示すために点灯します。クルーは警告を解除する必要があります。 AUTO LAND(自動着陸):航空機が完了できない自動着陸を行っている場合、この警告灯が点灯します。クルーは航空機の制御を引き継ぎ、警告を解除する必要があります。 SIDE STICK PRIORITY(サイドスティックプライオリティ):2名のパイロットが同時にサイドスティック入力を行ったことにより競合が発生した場合、このランプが点灯します。
EFISコントロールパネル このパネルは、パイロットと First Officer の EFIS 表示の各要素を個別に制御します。 気圧ノブは高度計の設定を制御するために使用します。外側のノブはインチ水銀柱とヘクトパスカルの切り替えを行います。内側のノブは必要な気圧を設定します。
 FD:フライトディレクターバーのオンとオフを切り替えます。これらの表示は、現在のフライトプランやアプローチ手順に従うための視覚的なガイダンスを PFD 上に提供します。
LS:ILS アプローチ中に、着陸システムのグライドスロープ表示を切り替えます。
ADF1/VOR1:MCDU で同調された ADF1 または VOR1 の周波数を使用する ADF ポインターや VOR 針路偏差表示器を表示します。
ADF2/VOR2:MCDU で同調された ADF2 または VOR2 の周波数を使用する ADF ポインターや VOR 針路偏差表示器を表示します。
Mode Rotary(モードロータリー):利用可能な表示モード間で MFD を切り替えます。
Range Rotary(レンジロータリー):MFD マップの縮尺を調整します。
CSTR(制約):点灯時、PFD は近くの高度と速度の制約を表示します。
WPT(ウェイポイント):点灯時、PFD は近くのウェイポイントを表示します。
VOR.D(VORステーション):点灯時、PFD は近くの VOR ステーションを表示します。
NDB(NDBステーション):点灯時、PFD は近くの NDB ステーションを表示します。
ARPT(空港):点灯時、PFD は近くの空港を表示します。
FD:フライトディレクターバーのオンとオフを切り替えます。これらの表示は、現在のフライトプランやアプローチ手順に従うための視覚的なガイダンスを PFD 上に提供します。
LS:ILS アプローチ中に、着陸システムのグライドスロープ表示を切り替えます。
ADF1/VOR1:MCDU で同調された ADF1 または VOR1 の周波数を使用する ADF ポインターや VOR 針路偏差表示器を表示します。
ADF2/VOR2:MCDU で同調された ADF2 または VOR2 の周波数を使用する ADF ポインターや VOR 針路偏差表示器を表示します。
Mode Rotary(モードロータリー):利用可能な表示モード間で MFD を切り替えます。
Range Rotary(レンジロータリー):MFD マップの縮尺を調整します。
CSTR(制約):点灯時、PFD は近くの高度と速度の制約を表示します。
WPT(ウェイポイント):点灯時、PFD は近くのウェイポイントを表示します。
VOR.D(VORステーション):点灯時、PFD は近くの VOR ステーションを表示します。
NDB(NDBステーション):点灯時、PFD は近くの NDB ステーションを表示します。
ARPT(空港):点灯時、PFD は近くの空港を表示します。飛行管理ユニット(オートパイロット)
 このパネルは、オートパイロットのパラメータとモードを制御します。
速度、針路、垂直速度、および高度は、パイロットが具体的に選択(適切なノブを「選択モード」に引き下げて)することも、フライト管理誘導システム(FMGS)に自動管理(適切なノブを「管理モード」に押し込んで)させることもできます。
自動管理模式では、システムが現在の状況、航空機の構成、およびフライトプランに基づいて適切なパラメータを選択し、該当する表示の横に点を表示します。
このパネルは、オートパイロットのパラメータとモードを制御します。
速度、針路、垂直速度、および高度は、パイロットが具体的に選択(適切なノブを「選択モード」に引き下げて)することも、フライト管理誘導システム(FMGS)に自動管理(適切なノブを「管理モード」に押し込んで)させることもできます。
自動管理模式では、システムが現在の状況、航空機の構成、およびフライトプランに基づいて適切なパラメータを選択し、該当する表示の横に点を表示します。