フライトシミュレーター愛好家のノート
-
キーボードによるGPSフライトプラン入力
X-Plane 11上の<a href="/x-plane10/2017/09/xplane11-g530.>G530ナビゲーターと <a href="/x-plane10/2017/11/x-plane-11-g1000.>G1000ナビゲーターは非常に優秀ですが、 使い勝手としては、ウェイポイントの入力が少しやりにくいという点が難点です。 マウスでその小さなノブを操作するのは、決して良いユーザー体験とは言えません。
そこで見つけたのが、このGps Flightplan Input via Keyboardというアドオンです。 キーボードを使ってウェイポイントを直接入力できるので、 G530やG1000の活用がずっと便利になるでしょう。

ただし説明を見ると、
INSTALLATION Unzip the folder "GpsFPLInput" into "X-Plane11\Resources\plugins\" If you are using the Steam Xplane11 the directory will be "Steam\steamapps\common\X-Plane 11\Resources\plugins\"
SYSTEM REQUIREMENTS OS: Windows, X-Plane 11.1
どうやらWindows版のみの対応のようで、Macユーザーとしては、引き続き様子を見るしかなさそうです。
-
左右の主脚は同時に格納されるのでしょうか?
本サイトでは、これまでいくつかの着陸装置(脚)に関連する話題を取り上げてきました。例えば、 <a href="/x-plane10/2016/01/center-landing-gear.>格納されない中央メインギア <a href="/x-plane10/2015/12/landing-gear-override-trigger.>Landing Gear Override Trigger <a href="/x-plane10/2013/08/-nose-landing-gear.>いくつかの機種の前脚 などです。今日もこのテーマを続けます。
最近、大阪でスポット航空撮影をしていた際にある現象に気づきました。 それは、ボーイング767-300ERが離陸後に着陸装置を格納する際、 左右が同時に格納されるのではなく、非常に意外に思える動きをしていました。
以下に連続撮影した4枚の写真を掲載します。
 図1、右側の着陸装置ドアが左側よりもわずかに早く開いているのがわかります。
図1、右側の着陸装置ドアが左側よりもわずかに早く開いているのがわかります。 図2、両方のドアが開き、着陸装置の格納が始まりますが、
右側が左側よりもほんの少しだけ早く、
右側はすでに格納を開始していますが、左側はまだ垂直に下ろされた状態です。
図2、両方のドアが開き、着陸装置の格納が始まりますが、
右側が左側よりもほんの少しだけ早く、
右側はすでに格納を開始していますが、左側はまだ垂直に下ろされた状態です。
 図3、半分まで格納された状態では、差は非常に小さいですが、
右側と左側で角度が異なっているのが観察できます。
図3、半分まで格納された状態では、差は非常に小さいですが、
右側と左側で角度が異なっているのが観察できます。
 図4、続いて右側の着陸装置はすでに機体内に収まり始めていますが、
左側はまだ外に出ています。
図4、続いて右側の着陸装置はすでに機体内に収まり始めていますが、
左側はまだ外に出ています。
この日は他にもA321、ボーイング737や777、ERJ170などの機種を撮影しましたが、 それらはすべて左右の着陸装置が同時に格納されました。
 ボーイング777-300
ボーイング777-300
 A321neo
A321neo
 ボーイング737-800
ボーイング737-800
 ERJ170
ERJ170
もちろん、この日に撮影できた767は1機だけだったので、これがすべての767に当てはまるわけではありませんが、 今後もこの現象を引き続き観察していくつもりです。
-
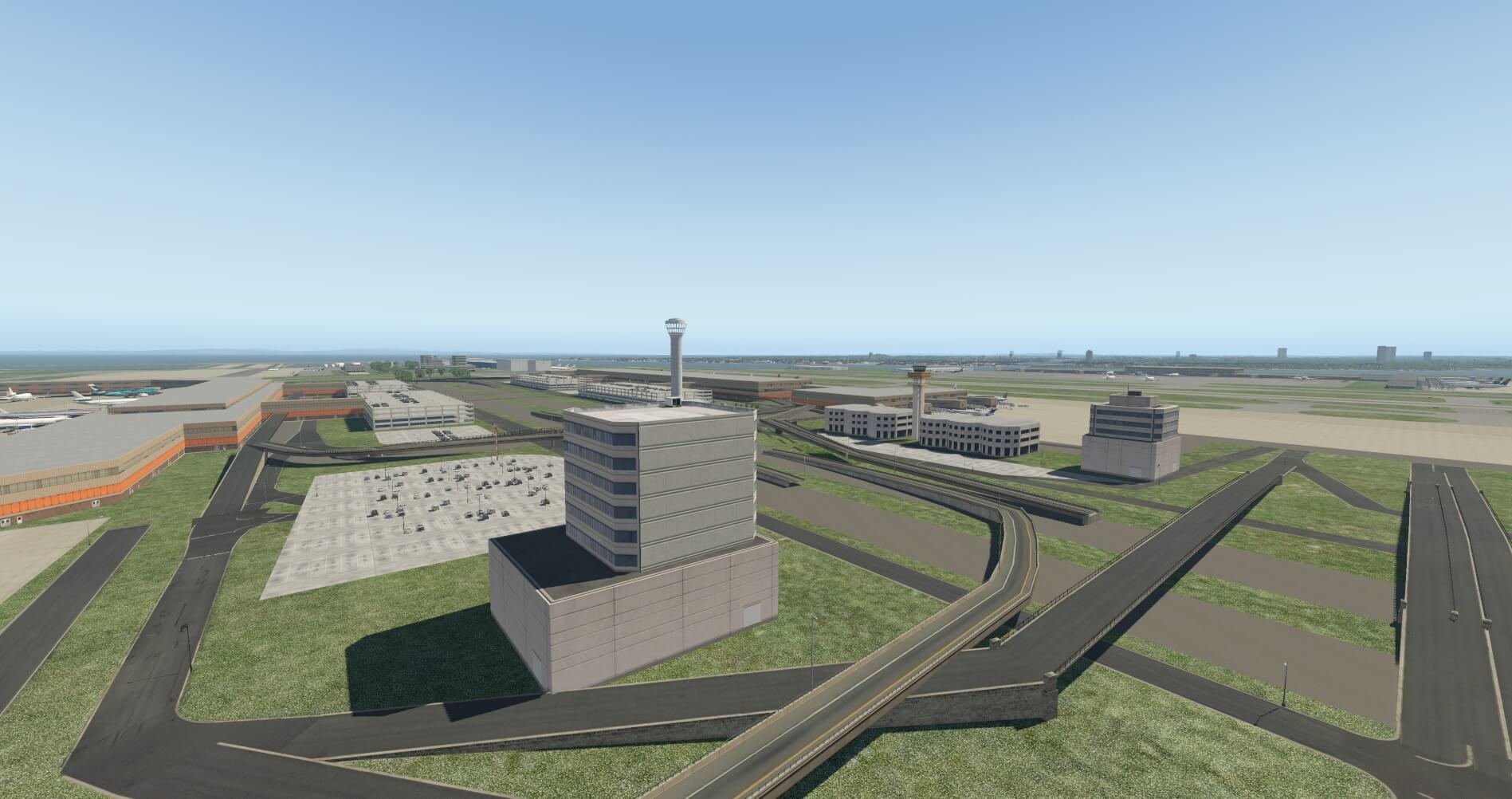
X-Plane 11で利用可能なアジアの無料空港の紹介
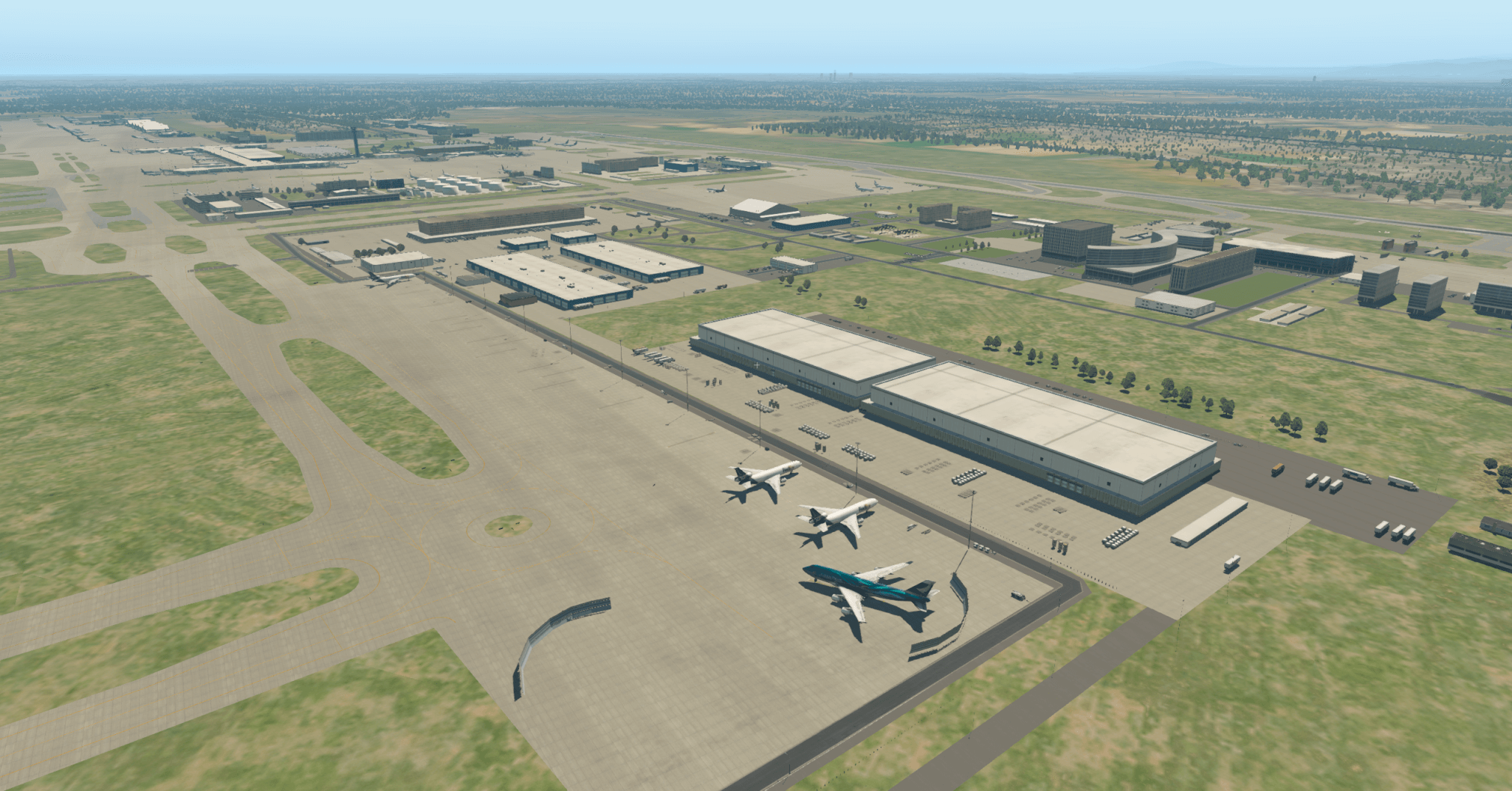
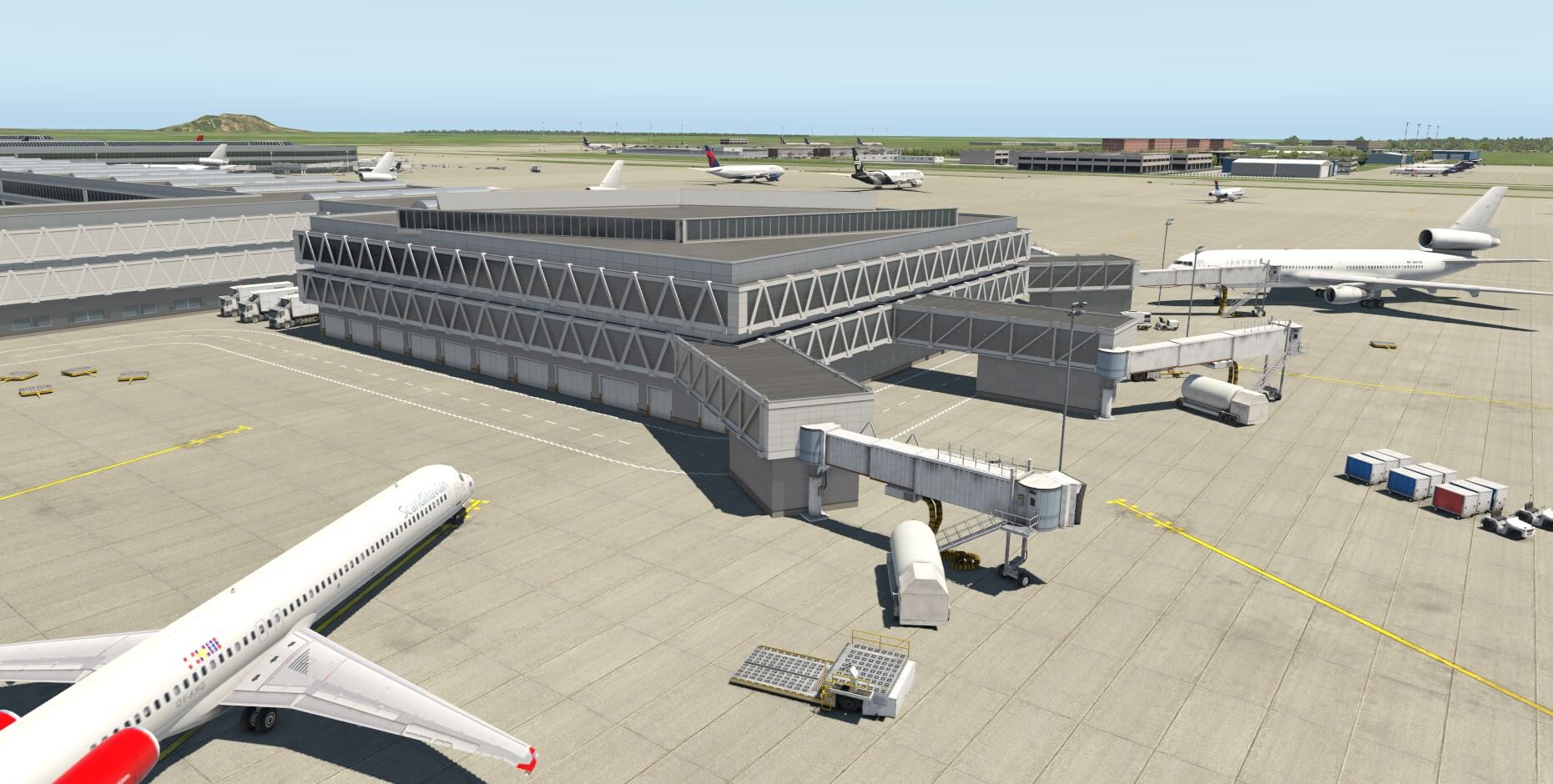
x-plane.orgでは、美しい無料の空港がいくつか紹介されています。 以下では、北京首都国際空港、広州白雲空港、杭州蕭山空港、東京羽田国際空港など、アジアの空港をいくつか紹介します。 これらの空港は、XPの本体に含まれているため、別途ダウンロードする必要はありません。
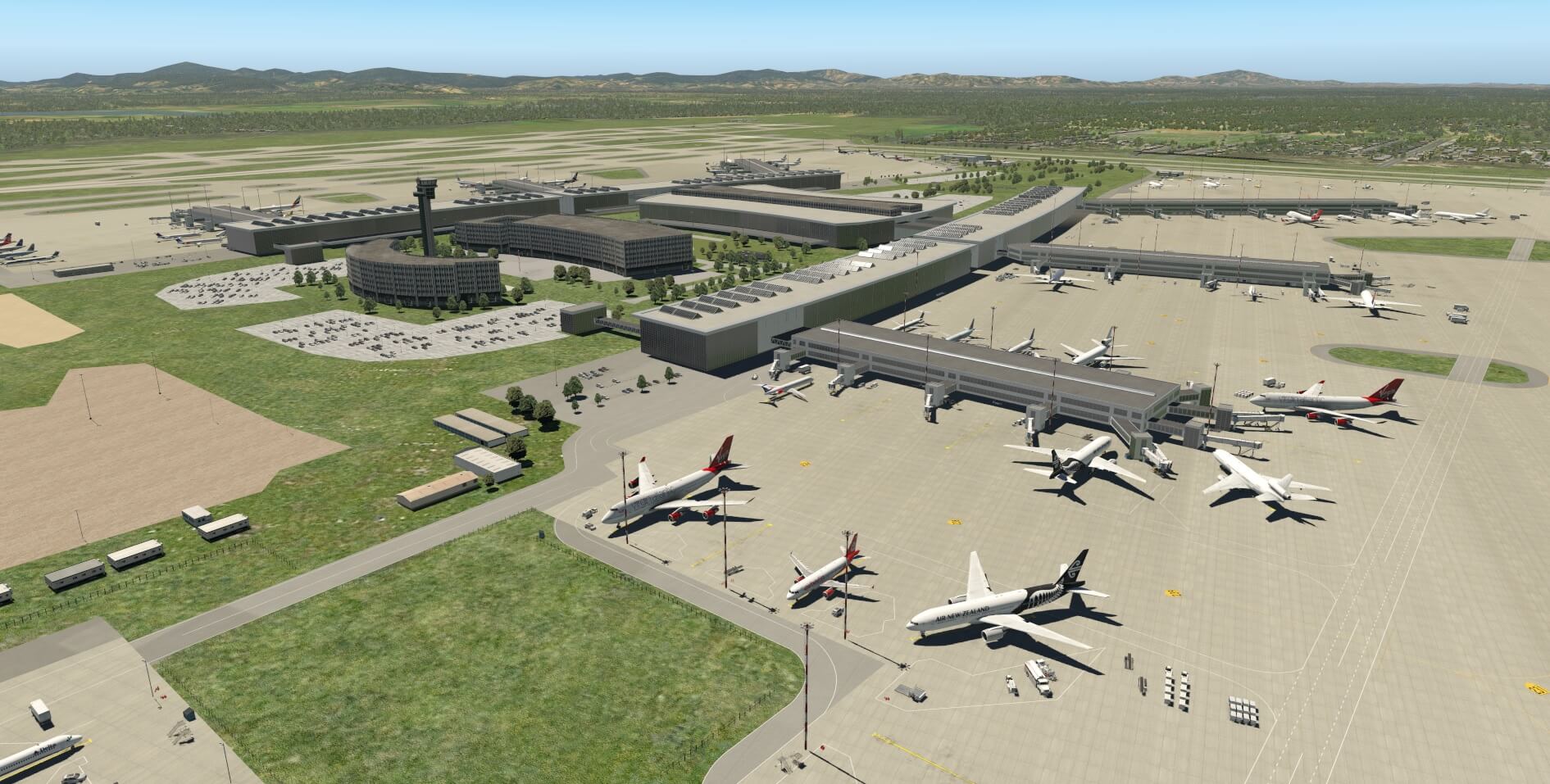
まず、北京首都国際空港Beijing Capital Intl (ZBAA)を見てみましょう
全体図
 塔台からの眺め
塔台からの眺め
 空港の南側からの俯瞰
空港の南側からの俯瞰
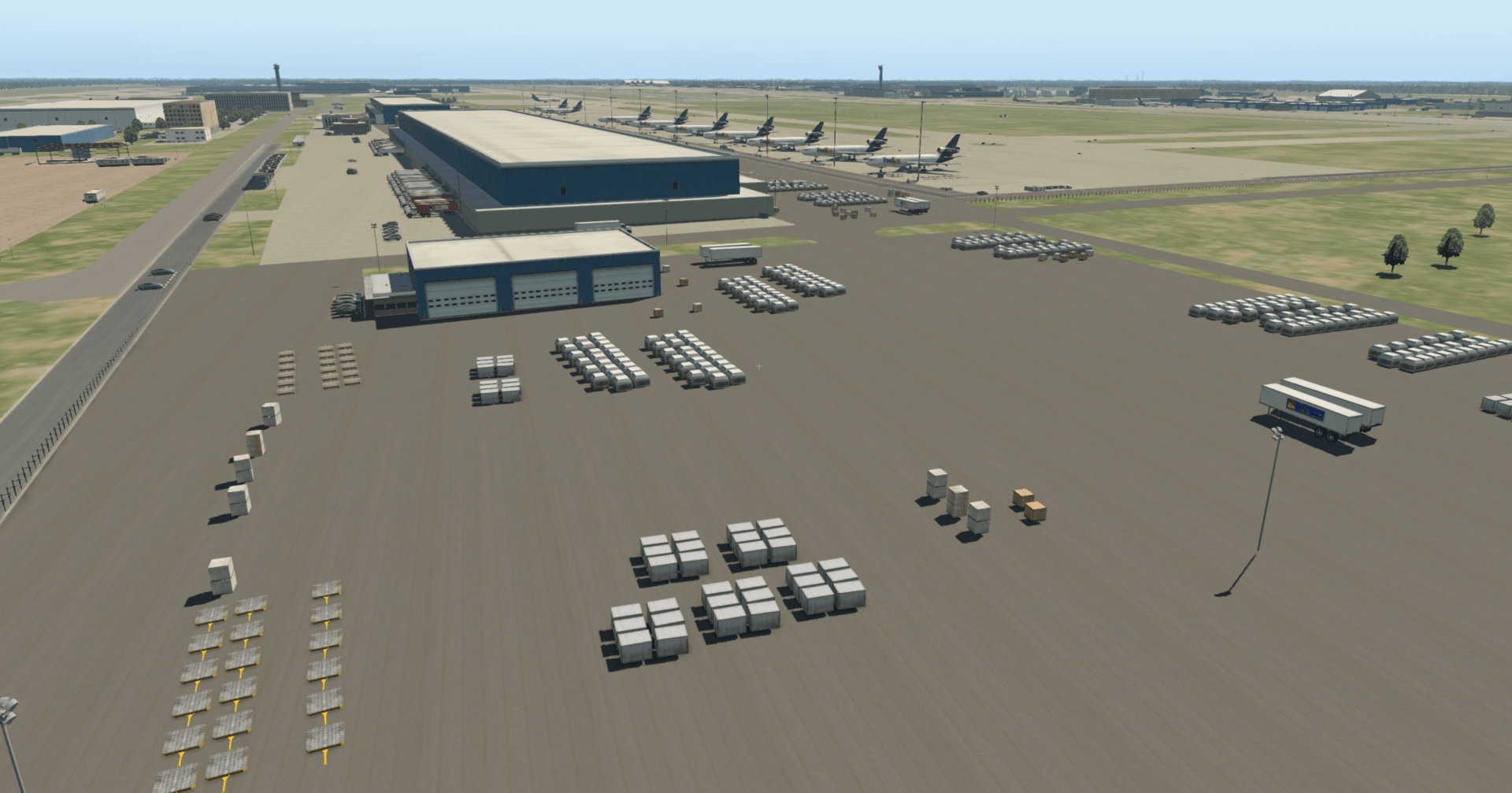
 貨物エリア
貨物エリア
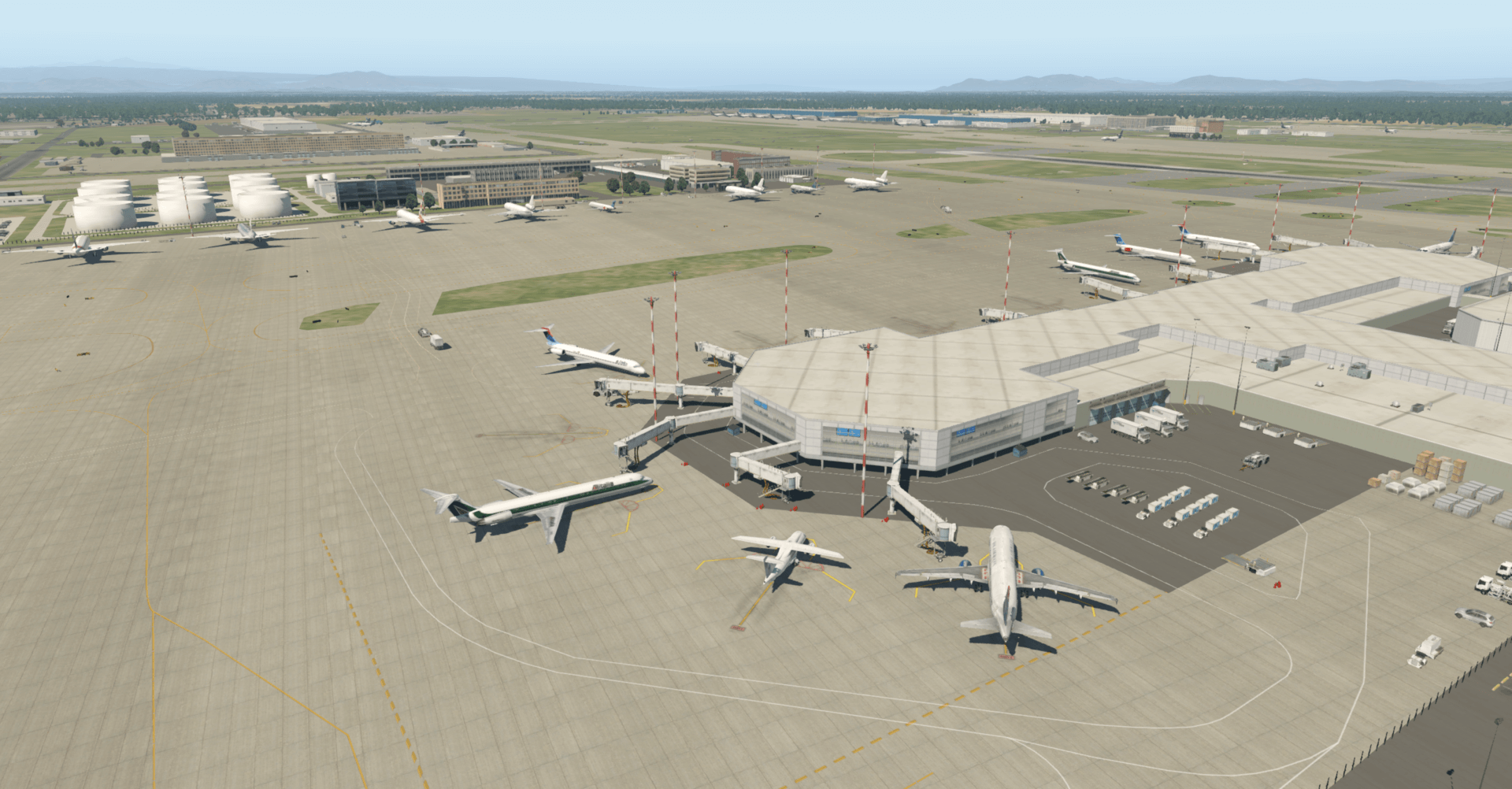
杭州蕭山空港Hangzhou Xiaoshan International (ZSHC) 全体図
 ターミナル
ターミナル
 貯油タンクエリア
貯油タンクエリア
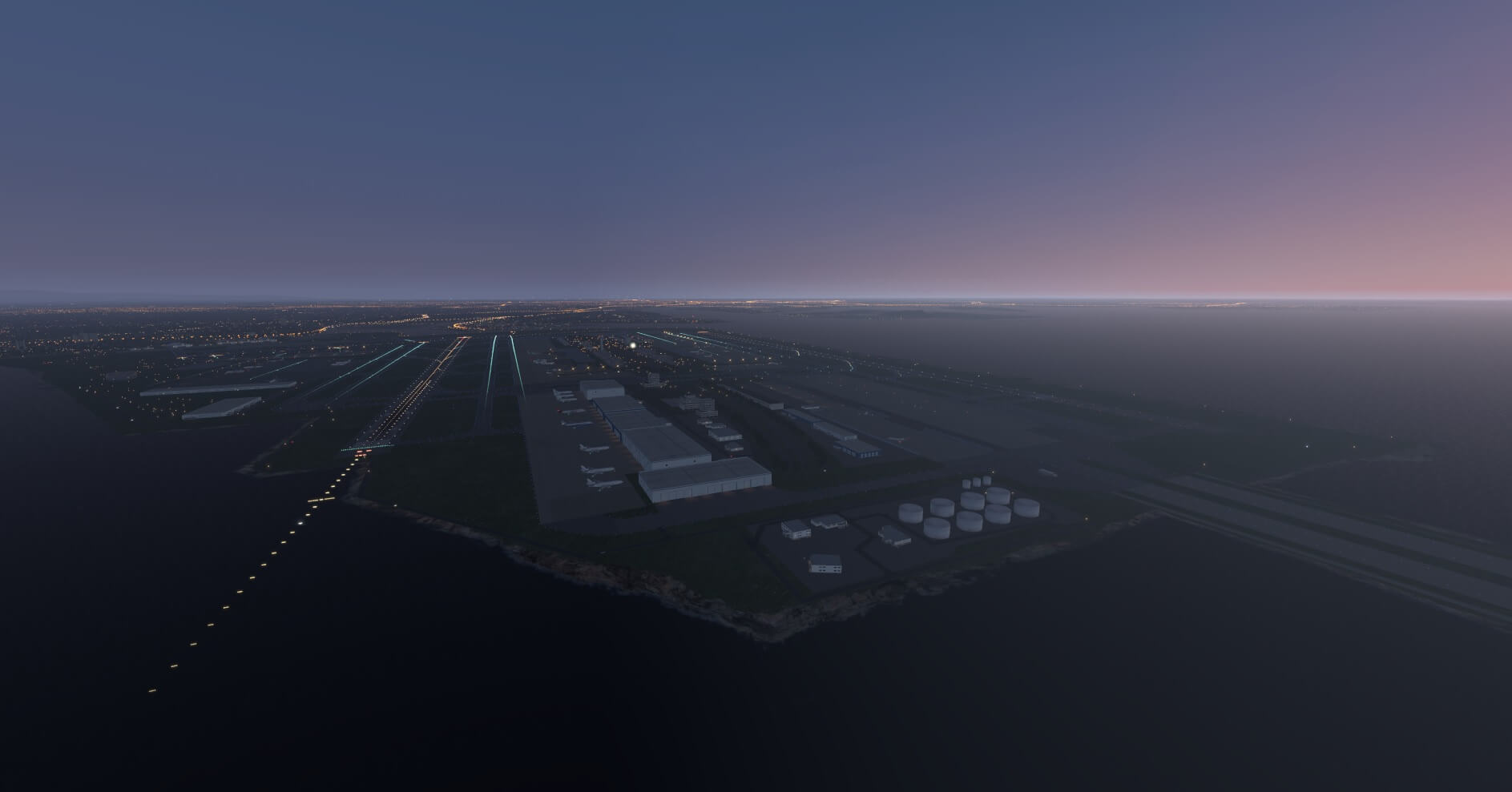
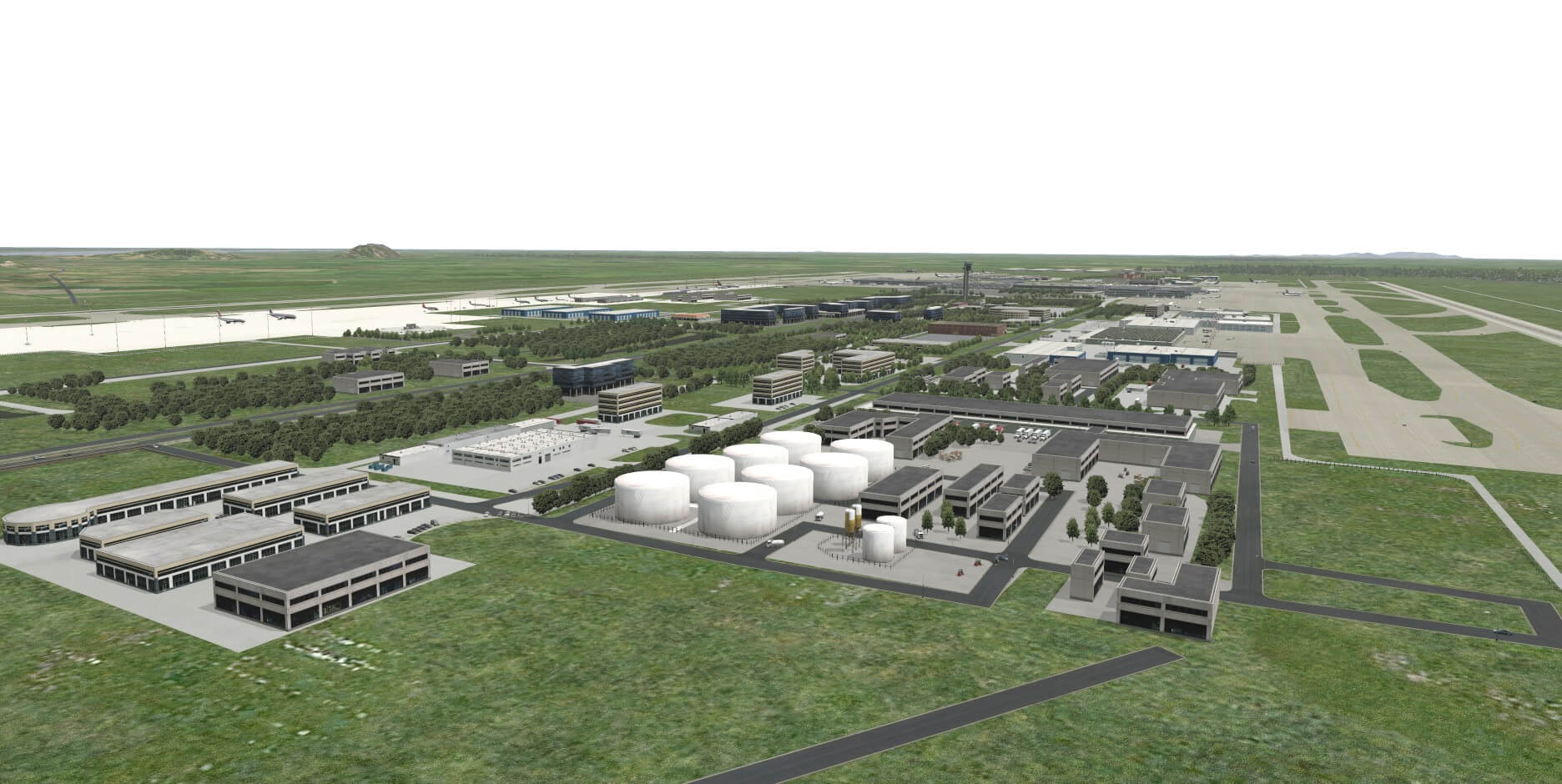 夕暮れ時
夕暮れ時

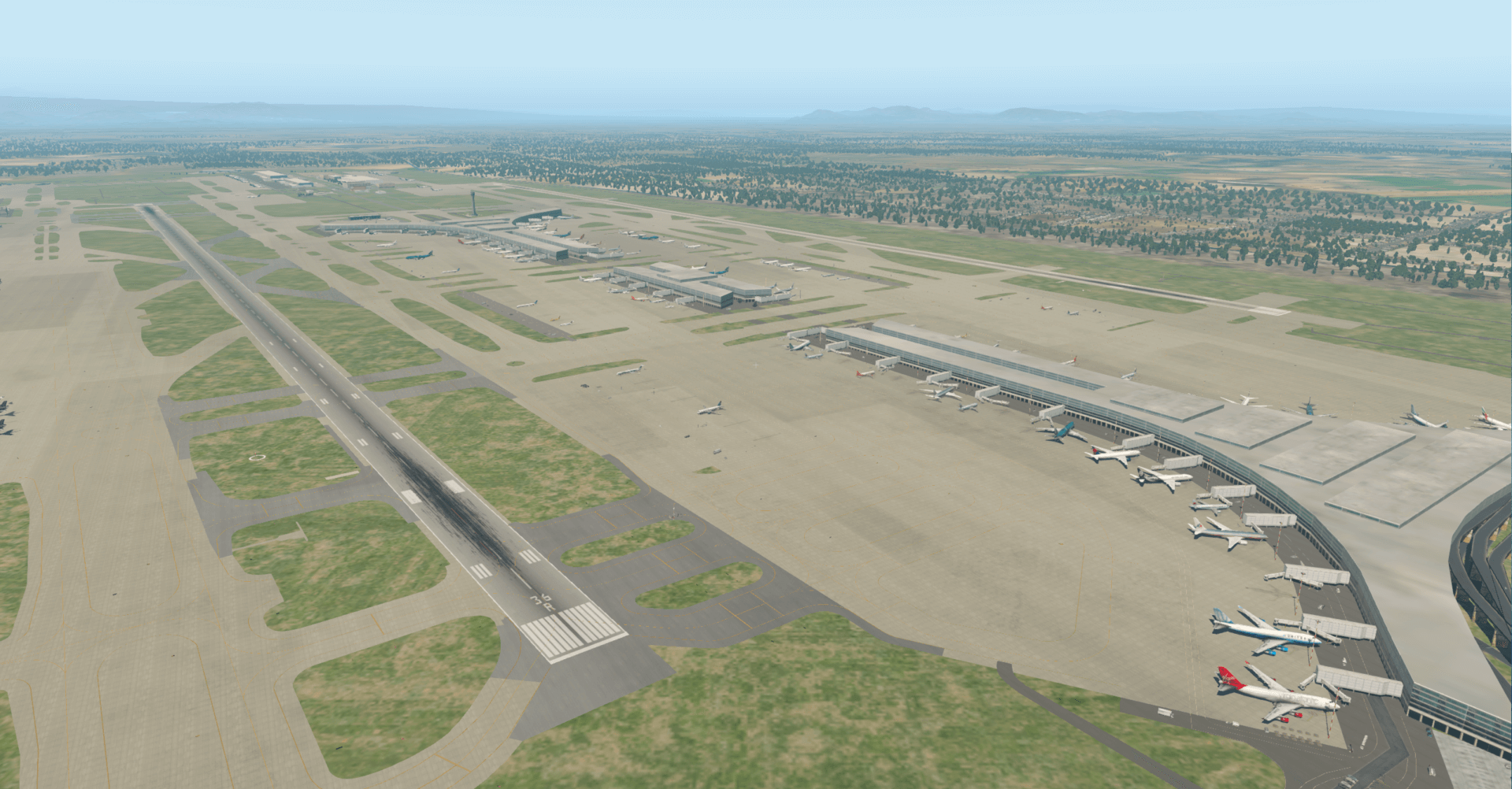
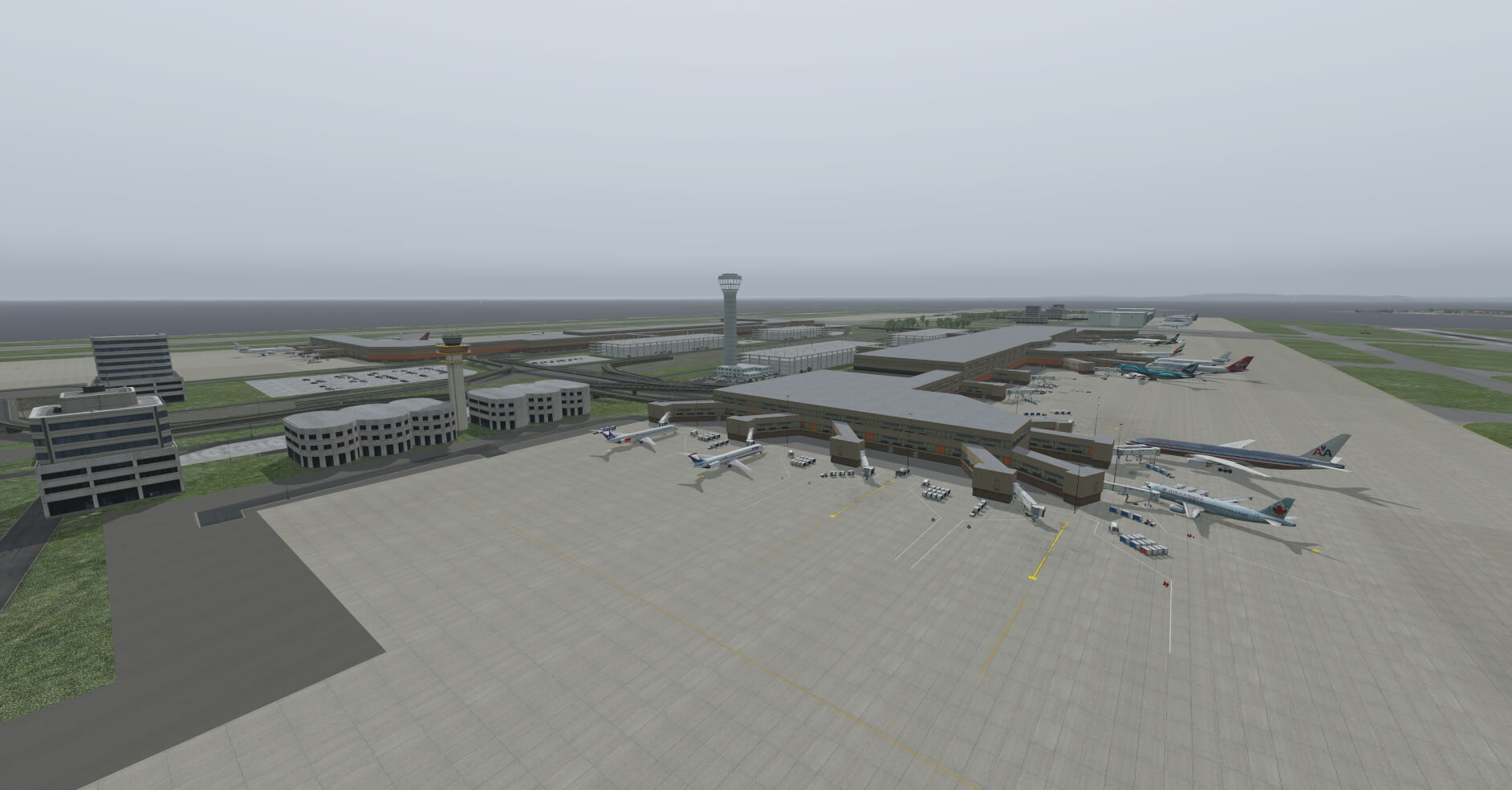
広州白雲空港Guangzhou Baiyun Intl (ZGGG) 全体図
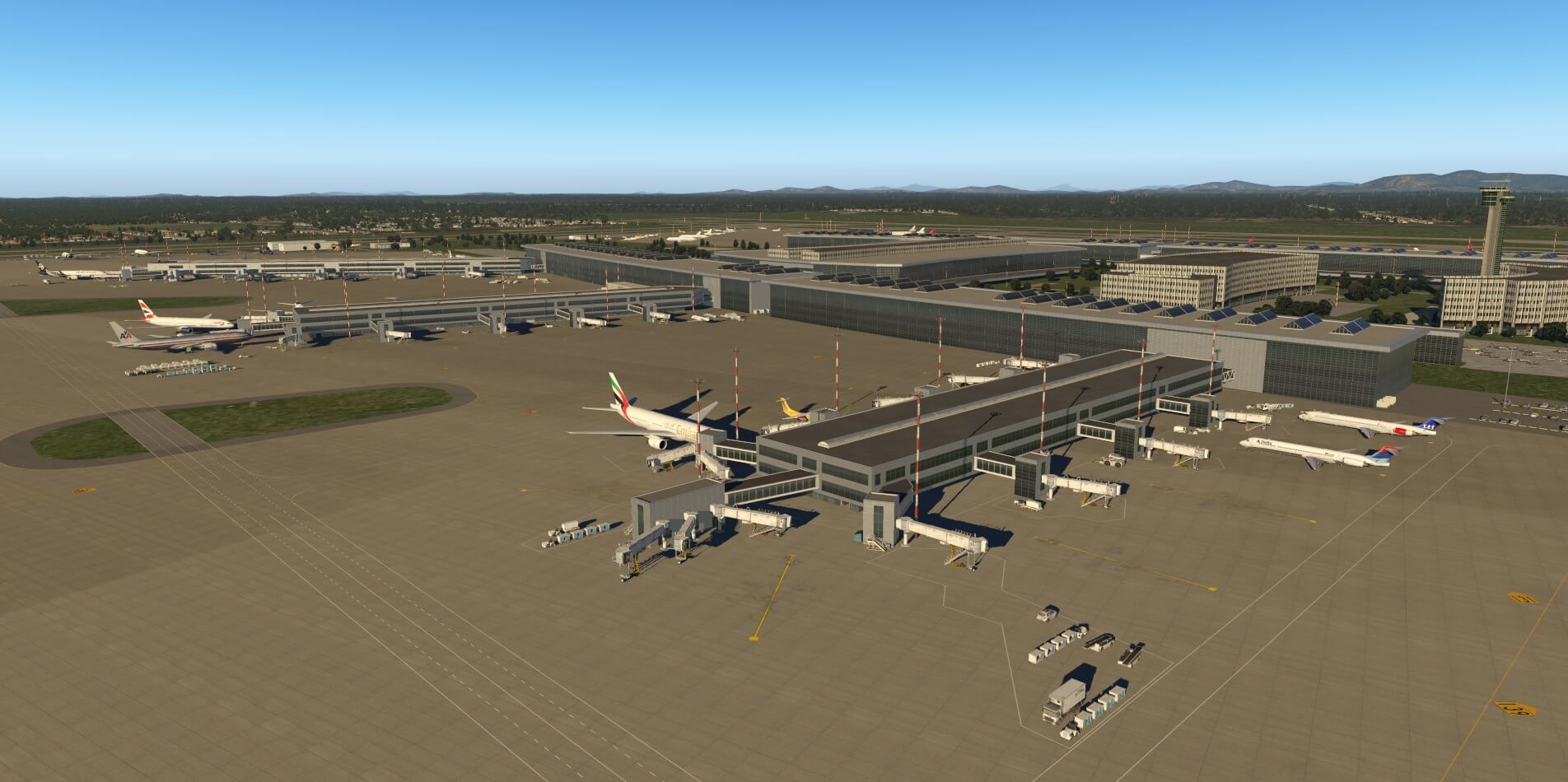 夜景
夜景
 誘導路
誘導路
 空撮
空撮
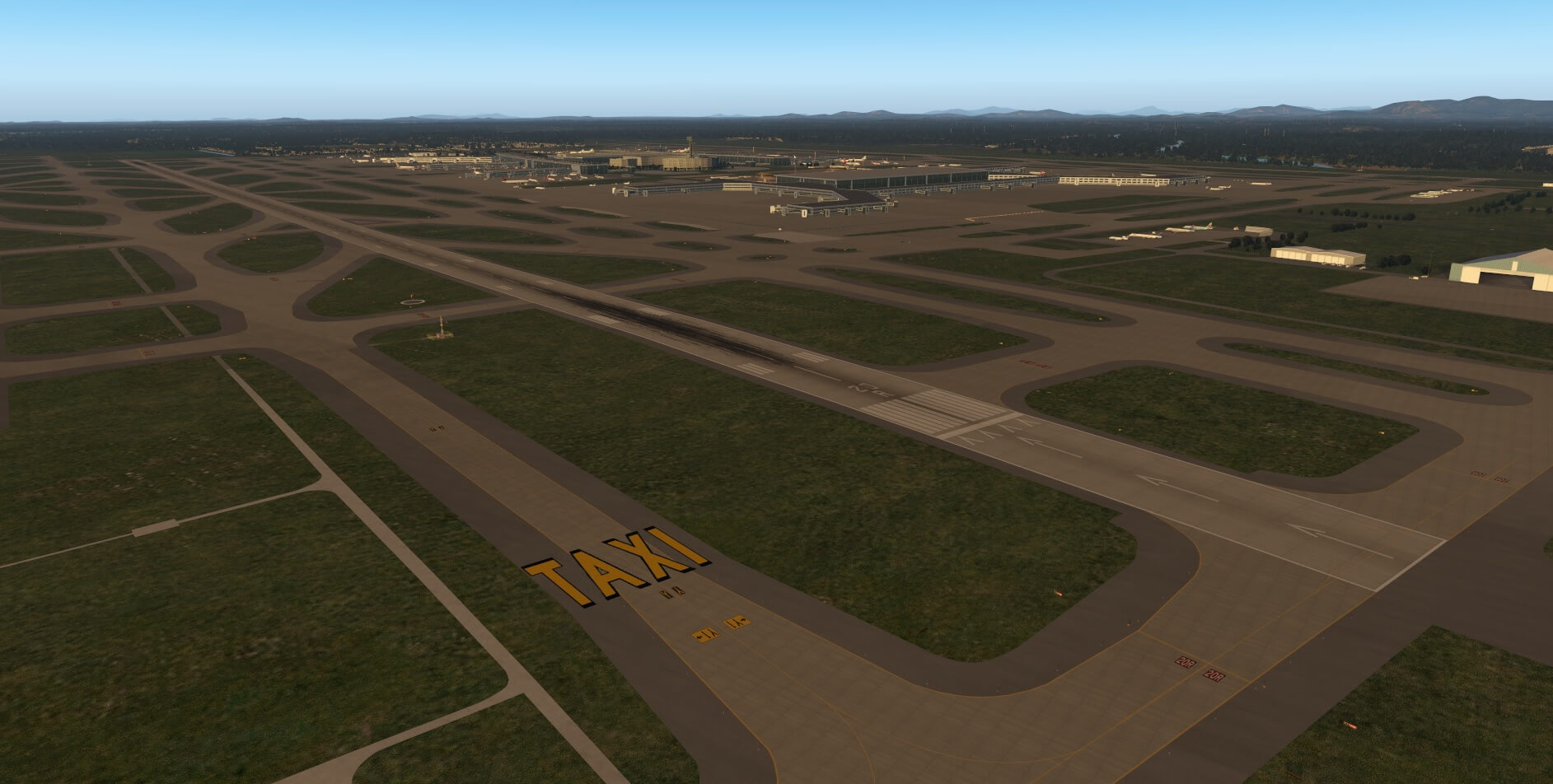
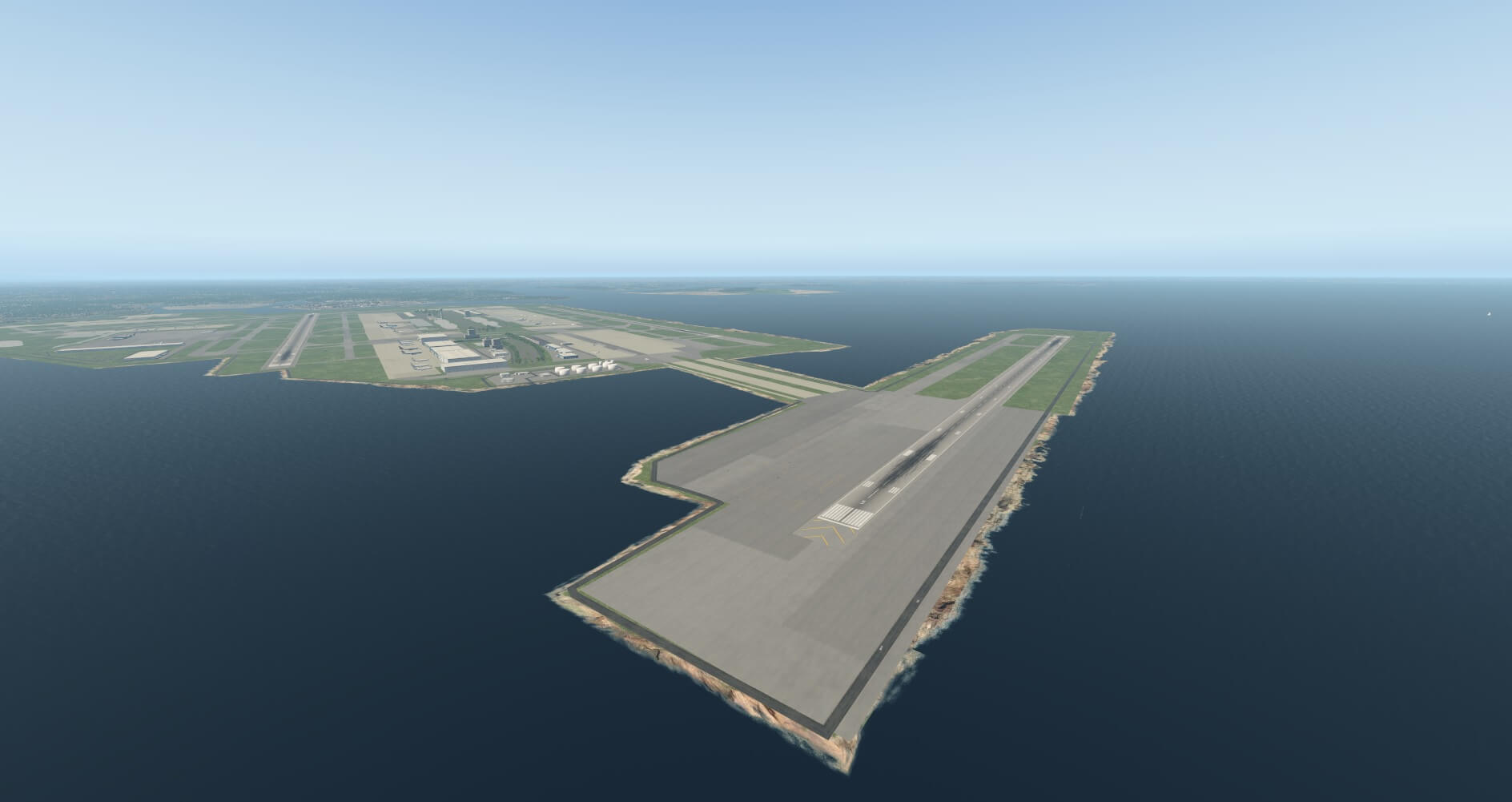
東京羽田国際空港Tokyo Haneda International (RJTT) 05滑走路
 夜景
夜景
 第1ターミナル北側
第1ターミナル北側
 塔台エリア
塔台エリア
-
ミニおよび軽量ドローンの自由飛行時代到来:無人航空機飛行管理暫定条例(意見募集稿)を読む
中国工業情報化部が『無人操縦航空器飛行管理暫行条例(意見募集稿)』に関する意見募集の通知を発表しているのを見かけました。これは今後、マイクロドローンの管理が緩和されることを示しており、実に朗報です。
ドローンの具体的な分類は以下の通りです。
運用上のリスクの大きさに基づき、民生用ドローンはマイクロ、小型、中型、大型に分類されます。 うち: マイクロドローンとは、機体重量が0.25キログラム未満で、設計性能が同時に飛行真高が50メートル以下、最大飛行速度が時速40キロメートル以下、無線発射設備が微功率短距離無線発射設備の技術要件に適合する無人操縦航空器を指します。 小型ドローンとは、機体重量が4キログラム以下、かつ最大離陸重量が7キログラム以下、最大飛行速度が時速100キログラム以下で、空域管理の要件に適合する空域保持能力及び信頼できる監視能力を有する無人操縦航空器を指しますが、マイクロドローンを含みません。 中型ドローンとは、機体重量が15キログラム以下または最大離陸重量が25キログラム以下のドローンを指しますが、マイクロ、小型ドローンを含みません。 中型ドローンとは、最大離陸重量が25キログラムを超え150キログラム以下で、かつ機体重量が15キログラムを超えるドローンを指します。 大型ドローンとは、最大離陸重量が150キログラムを超えるドローンを指します。
注:機体重量とは、ドローンの機体、バッテリー、燃料容器等の固体装置の重量の総和であり、充填燃料及びペイロードの重量を含みません。
マイクロドローンに関連する管理条項は以下の通りです。実名認証や登録登録を行う必要がないことがわかります。禁区でない限り、50メートル以下(一般的な住宅ビルの10階建て程度?)であれば、基本的に自由に飛行できます!
マイクロドローン以外の民生用ドローンを販売する単位・個人は、公安機関に届け出を行い、購入単位・個人の関連情報を確認・記録し、定期的に公安機関に報告しなければなりません。 マイクロドローン以外の民生用ドローンを購入する単位・個人は、実名認証を通過し、関連情報の確認に協力しなければなりません。 マイクロドローン以外の民生用ドローンは、民用航空管理機関に実名で登録を行い、関連規則に基づき国籍登録を行わなければなりません。 マイクロドローン以外の民生用ドローンの飛行は、要求に基づき自動的に身元識別コードまたはその他の身元識別情報を送信しなければなりません。
承認を得ずに、マイクロドローンは以下の空域での飛行を禁止します: (一)真高50メートル以上の空域; (二)空中禁区およびその周辺2000メートル範囲; (三)空中危険区域およびその周辺1000メートル範囲; (四)空港、臨時離着陸点の境界内およびその周辺2000メートル範囲の上方; (五)国境線、国境線から我が国側へ2000メートル範囲の上方; (六)軍事禁区およびその周辺500メートル範囲の上方、軍事管理区、設区の市級(含む)以上の党政府機関、監管場所およびその周辺100メートル範囲の上方; (七)電波天文台およびその周辺3000メートル範囲の上方、衛星地上局(測控、測距、受信、ナビゲーション局を含む)等の電磁環境の特殊保護を必要とする施設およびその周辺1000メートル範囲の上方、気象レーダー局およびその周辺500メートル範囲の上方; (八)易燃性・爆発性危険物の生産・貯蔵を行う大型企業および可燃性重要物質の備蓄を行う大型倉庫・基地およびその周辺100メートル範囲の上方、発電所、変電所、ガソリンスタンドおよび中大型駅、埠頭、港、大型イベント現場およびその周辺50メートル範囲の上方、高速鉄道および両側100メートル範囲の上方、普通鉄道および省級以上の道路および両側50メートル範囲の上方; (九)軍用航空超低空飛行空域。 上述のマイクロドローン禁止飛行空域の具体的な範囲は、省級人民政府が戦区と協議して確定し、設区の市級人民政府が警告標識を設置または相应範囲を公開します。警告標識の設計は、国务院民用航空主管部門が担当します。
小型ドローンの空域内容
以下の空域を小型ドローン管理空域として划定します: (一)真高120メートル以上の空域; (二)空中禁区およびその周辺5000メートル範囲; (三)空中危険区域およびその周辺2000メートル範囲; (四)軍用空港の清空保護区、民用空港の障害物制限面の水平投影範囲の上方; (五)有人操縦航空器の臨時離着陸点およびその周辺2000メートル範囲の上方; (六)国境線から我が国側へ5000メートル範囲の上方、国境線から我が国側へ2000メートル範囲の上方; (七)軍事禁区およびその周辺1000メートル範囲の上方、軍事管理区、設区の市級(含む)以上の党政府機関、原子力発電所、監管場所およびその周辺200メートル範囲の上方; (八)電波天文台およびその周辺5000メートル範囲の上方、衛星地上局(測控、測距、受信、ナビゲーション局を含む)等の電磁環境の特殊保護を必要とする施設およびその周辺2000メートル範囲の上方、気象レーダー局およびその周辺1000メートル範囲の上方; (九)易燃性・爆発性危険物の生産・貯蔵を行う大型企業および可燃性重要物質の備蓄を行う大型倉庫・基地およびその周辺150メートル範囲の上方、発電所、変電所、ガソリンスタンドおよび中大型駅、埠頭、港、大型イベント現場およびその周辺100メートル範囲の上方、高速鉄道および両側200メートル範囲の上方、普通鉄道および国道および両側100メートル範囲の上方; (十)軍用航空低空・超低空飛行空域; (十一)省級人民政府が戦区と協議して確定した管理空域。 承認を得ずに、小型ドローンは上述の管理空域での飛行を禁止します。管理空域外は、特殊な情况がない限り、すべて小型ドローン適飛空域として划定されます。農業保護ドローンの適飛空域は、小型ドローン適飛空域内にあり、真高が30メートル以下で、かつ農林牧区域の上方に位置します。
飛行運用について、飛行計画の申請が不要なのは本当に素晴らしいことです。
マイクロドローンが禁止飛行空域外で飛行する場合、飛行計画の申請は不要です。 小型、農業保護ドローンが相応の適飛空域で飛行する場合、飛行計画の申請は不要ですが、総合監管プラットフォームへリアルタイムで動態情報を報送する必要があります。
-
大阪伊丹空港の撮影スポット紹介・その6:下河原公園
<a href=“http://www.city.itami.lg.jp/shokai/sansaku/oashisu/1392373996386. target="_blank” rel=“noopener noreferrer”>下河原も比較的有名なスポッティング場所です。
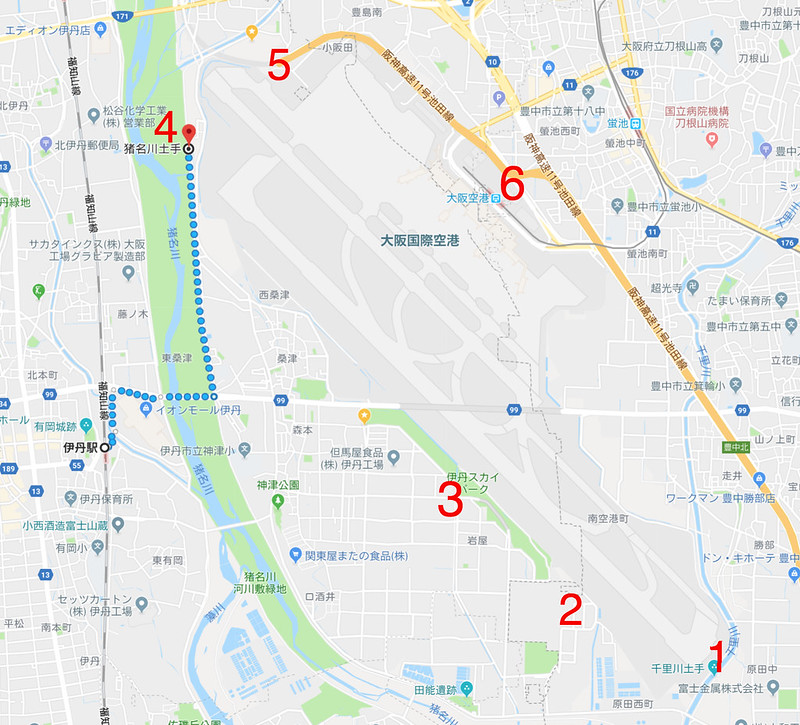 場所は伊丹空港の北西角、図中の5番の場所になります。
交通手段はJR伊丹駅で下車し、
6番のりばから「下河原」行きのバスに乗り、
終点で降りてから10分ほど歩くと到着します。
場所は伊丹空港の北西角、図中の5番の場所になります。
交通手段はJR伊丹駅で下車し、
6番のりばから「下河原」行きのバスに乗り、
終点で降りてから10分ほど歩くと到着します。ここで撮影する場合、実はほとんどの時間は逆光の状態になるため、 私は午後の夕暮れ時、光が柔らかくなる時間に行くことを選びました。


撮影した写真は、主に大阪市内の高層ビル群を背景にし、 離陸中の航空機を被写体として撮り、 エンジンから排出される熱気流を強調しようと思いました。




着陸時の航空機も、同様に市内の高層ビルを背景にしています。

似たような写真を見ると単調に思えるかもしれませんが、自分は飽きずに楽しんでいます。 ここから離陸を撮る場合、距離がまだ少し遠いため、 次回もし行く機会があれば、APS-C機を持っていくのがベストで、 400mmのレンズがあれば、焦点距離は640mmまで届き、 その方がもっと良い効果になるでしょう。
-
大阪伊丹空港の撮影スポット紹介 その5 猪名川土手
<a href="/x-plane10/2018/01/sky-land-harada.>スカイランドはらだを出た後、別の大阪のスポット撮影地点「猪名川土手」へ向かいました。 猪名川は川の名前で、土手は堤防の意味です。 つまり、「猪名川土手」は公園ではなく、伊丹空港の滑走路頭にある河川敷です。 ここからは、滑走路32Lでの離着陸を正面から撮影することができます。






ここはただの細い小道で、背後には滑走路の進入灯があります。
 ジョギングや散歩、サイクリングをする人が時々通ります。
周りには何もなく、風も強いため、1時間ほどで撤退しました。
ジョギングや散歩、サイクリングをする人が時々通ります。
周りには何もなく、風も強いため、1時間ほどで撤退しました。しかし、この角度から飛行機の離陸を撮ると、本当に迫力のある写真が撮れます。 もし雪や雨の日なら、スラストリバーバーの水煙や雪煙はとても壮観だろうと思います。 今後、機会があればまたここで撮影したいと思います。
最後にアクセス方法です。最も簡単なのは、JR伊丹駅から歩くことです。 東へ向かって猪名川を渡り、川岸を北に15分ほど歩けば到着します。
図中の4番の場所です。 -
大阪伊丹空港の撮影スポット紹介(その4):Sky Land Harada
スカイランド原田も大阪伊丹空港の有名な撮影スポットですが、 空港の南東角の外側にあり、最も近い場所は滑走路から100〜200メートルほどです。 非常に特徴のある写真をたくさん撮ることができます。 今回はわざわざ走って行って見てきました。
初めて行ったので土地勘がなく、交通手段はバスを選択しました。 JR伊丹駅で下車し、バス停の6番のりばから、 22系統に乗って東口酒井で下車します。
 そこから北東方向へ歩いて3分ほどで到着です。
そこから北東方向へ歩いて3分ほどで到着です。 図を見るとこの公園は広大で、多くのスポーツ施設がありますが、
飛行機を撮影するなら、滑走路に沿って進み、駐車場の外側に行けば大丈夫です。
図を見るとこの公園は広大で、多くのスポーツ施設がありますが、
飛行機を撮影するなら、滑走路に沿って進み、駐車場の外側に行けば大丈夫です。

 近接撮影の利点ですね。東京では絶対にこんなに良い条件はありません。うらやましい。
ただ残念なことに、当日は半曇りで、光の条件が今一つでした。
近接撮影の利点ですね。東京では絶対にこんなに良い条件はありません。うらやましい。
ただ残念なことに、当日は半曇りで、光の条件が今一つでした。



こういないわゆる「顔写真」だけでなく、飛行機の離陸と着陸の場所が目の前なので、 スポッティング形式の写真を撮るのに非常に適しています。



<a href="/x-plane10/2012/04/rjoo. target="_blank" rel=“noopener noreferrer”>大阪伊丹空港撮影スポット紹介その1 千里川で紹介した天草航空の Bombardier DHC-8-100はすでに退役し、 使用機もATR-42-600に切り替わりました。
 青いイルカのカラーリングは以前より可愛くはありませんが、やはり識別しやすいです。
青いイルカのカラーリングは以前より可愛くはありませんが、やはり識別しやすいです。この日は天気が悪く、また正午頃のヒートヘイズが機体のディテールに少なからず影響したので、 何枚か写真を撮りましたが、すべてを掲載するのはやめておきます。 今後機会を見つけて、午後にまた行って、どんな良い画が撮れるか試してみたいと思います。
スカイランド原田 Sky Land Harada の地理位置
図中の2番の地点 -
Garmin D2 Charlie 航空ウォッチのレビュー
<a href=Garmin D2 Delta PXチタニウム航空時計開封の儀
 <a href=Garmin D2 Delta PXチタニウム航空時計設定入門編
<a href=Garmin D2 Delta PXチタニウム航空時計設定入門編大阪への出張は普段、新幹線を利用することが多いですが、 今回はGarmin D2 Charlieをテストするため、往復とも全日空のフライトを予約しました。
Garmin Pilotでフライトプランを早めに作成し、
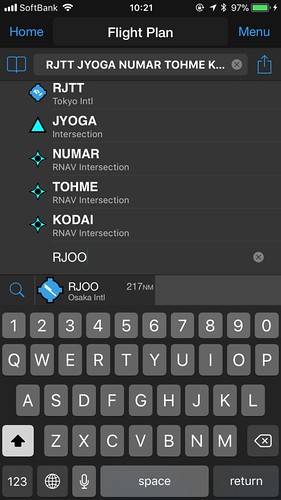
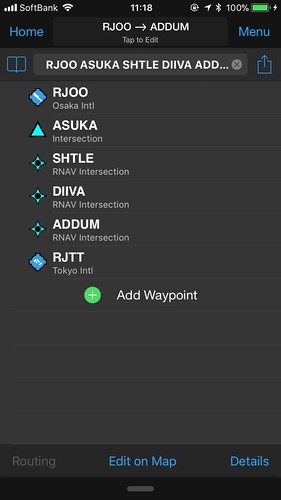
 時計に転送しました。
時計に転送しました。搭乗後、ナビアプリを開き、「フライト計画」、次に「保存された計画」を選択します。
 プッシュバック後の地上滑行中、時計を確認すると、
プッシュバック後の地上滑行中、時計を確認すると、
 速度は約20ノットですが、気圧計のデータが少し変です。
速度は約20ノットですが、気圧計のデータが少し変です。滑走路05で離陸し、
 方向転換をすると、富士山と空港が比較的はっきりと見えました。
方向転換をすると、富士山と空港が比較的はっきりと見えました。

再度、時計のデータを見てみると、
 速度が増し、高度が上がり、上昇率も出ています。
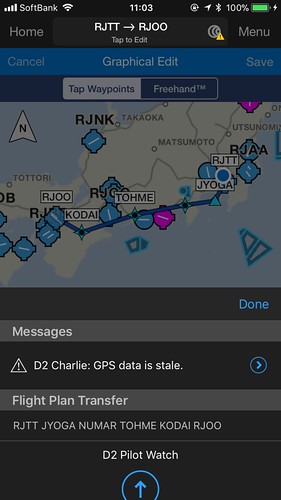
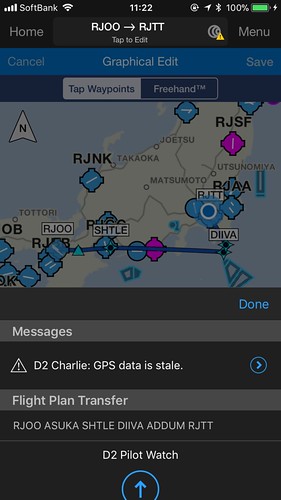
速度が増し、高度が上がり、上昇率も出ています。地図ページに切り替えると、
 航空機が基本的に事前に入力した航空路に沿って飛行していることがわかります。
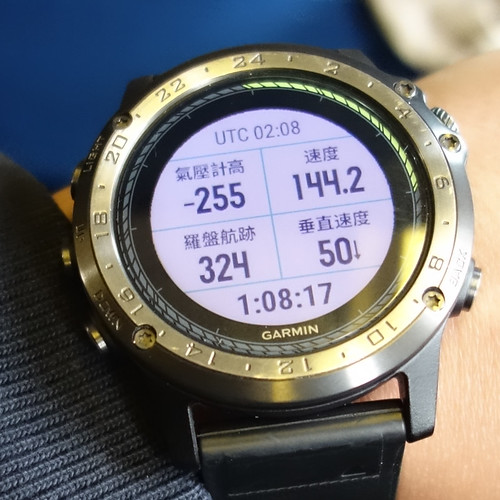
巡航高度付近まで上昇した後でもう一度見てみると、
航空機が基本的に事前に入力した航空路に沿って飛行していることがわかります。
巡航高度付近まで上昇した後でもう一度見てみると、
 速度、気圧高度、垂直速度の数値はまずまず正常です。
速度、気圧高度、垂直速度の数値はまずまず正常です。富士山を通過し、
 さらに進むと名古屋に到着したので、
さらに進むと名古屋に到着したので、
 名古屋中部国際空港(RJGG)のクローズアップも撮影しておきました。
名古屋中部国際空港(RJGG)のクローズアップも撮影しておきました。
 この時の巡航高度は20000フィートでした。
この時の巡航高度は20000フィートでした。すぐに降下プロセスに入りましたが、
 気圧計のデータはやや不安定で、少し奇妙でした。
気圧計のデータはやや不安定で、少し奇妙でした。大阪に近づくにつれ、


 淀川の上空を通過しました。
淀川の上空を通過しました。着陸直前のデータは以下の通りで、速度がかなり遅くなっていることがわかります。

帰路ではあえて夜のフライトを選択しました。外の景色は見えませんが、 時計自体のGPSと気圧計のパフォーマンスは以前と大きな変わりはなく、 ここではすべての画像を載せることは控えます。
しかし、東京に戻る際、少し珍しいアプローチ経路に遭遇しました。 搭乗中、標準的な手順では飛んでいないと感じていましたが、
 千葉の上空で数回方向を調整した後、
最終的には34Lで着陸しました。
当時は風向きが変わり、滑走路22に着陸するのかと思っていました。
千葉の上空で数回方向を調整した後、
最終的には34Lで着陸しました。
当時は風向きが変わり、滑走路22に着陸するのかと思っていました。降機時に客室乗務員のアナウンスで、羽田空港の滑走路が一時的に閉鎖されたため、 着陸は34Lのみとなり、上空で一部のフライトが待機し、 着陸が約15分遅れたと説明がありました。 その後、時計のデータをスマホに転送して確認すると、
 やはり管制による航空路の調整が見て取れました。
やはり管制による航空路の調整が見て取れました。 -
HUDを使用した低視程での離着陸
メモしておこう、HUDはこんなに大きな役割を果たしていたのか。勉強になった。
<a href=“http://news.carnoc.com/list/430/430205. target="_blank” rel=“noopener noreferrer”>中国民用航空、HUDを使用して視程150メートルという低視程下で安全に離陸
今回の霧による低視程に対し、 山東航空は山東空中交通管理局と済南空港の全面的な支援を受けてHUDを有効にし、視程150メートルの条件下で安全な離陸を実現しました。 これは中国民間航空史上初めて、RVR(滑走路視距離)150メートルでの離陸を実現した商業運航便となります。
山東航空はすでに9月8日に北京でHUD RVR 150メートル離陸の検証試飛に先駆けて完了させ、 その後、済南、青島、昆明、ウルムチ、石家荘の各空港でHUD RVR 150メートル離陸の検証試飛を円満に完了しました。
HUDが離着陸の基準を下げられる理由は、正確なフレア誘導を提供できるからです。 HUDのディスプレイでは、航空機が空港に接近する際、ディスプレイの中心位置に「小さな円」が表示されます。 パイロットはその「円」に沿って航空機を「合わせる」だけで、正確な着陸を行うことができ、これは多くのフライト系電子ゲームにある「大円で小円を捉える」という手法と全く同じです。
「HUD計器着陸システムが提供する誘導情報を通じて、着陸時の実際の降下軌跡は『大円』に相当し、HUD上の着陸誘導は『小円』として表示されます。 航空機の『大円』をHUDが提供する『小円』に合わせれば、航空機は正確な着陸を完了できます」 と、山東航空のベテラン機長で標準品質管理部総経理の王徳杰氏は述べています。
天候条件が悪く、着陸時に濃霧に遭遇したとしても、 パイロットはHUDが提供する正確なフレア誘導に従うことで、完全に正確な「盲着陸」を行うことが可能です。
<a href=“http://www.caac.gov.cn/XWZX/MHYW/201709/t20170908_46634. target="_blank” rel=“noopener noreferrer”>中国民用航空、HUD RVR150メートル低視程離陸の検証試飛を円満に完了
近年、天候要因によるフライトの遅延率への影響がますます大きくなっています。 2016年にフライトの正常率に影響を与えた要因の中で、天候要因は56%を占め、 特に冬春季には、霧やスモッグに代表される低視程の天候が大きな割合を占めています。
首都空港を例にすると、2008年から2015年の統計データによると、 RVRが200メートル未満の天候は44日、150メートル未満は31日、90メートル未満は9日でした。 フライトの正常性をさらに高めるため、近年、中国民用航空局はHUDを代表とする航行新技術の導入を積極的に推進し、科学技術による支援を強化してきました。
HUDはコンピュータ技術を利用して飛行情報(飛行パラメータ、姿勢情報、ナビゲーション情報など)および警告情報(テールストライク余裕、迎角制限など)をヘッドアップディスプレイに統合して表示し、 パイロットは外部の視認観察を維持したままこれらのパラメータを把握し、関連する誘導に従って飛行することができます。
実践により、HUDの使用は飛行の天候への依存度を下げ、フライトの正常性を向上させる面で顕著な効果を発揮できることが証明されています。
中国民用航空局飛行標準司の担当者は、 首都空港を例に挙げ、RVR150メートルの状況では、 高速道路は封鎖され、車両の速度は時速20キロメートルを超えないが、 HUD運用認証を取得している航空会社の航空機であれば、首都空港のRVR200メートル離陸基準を突破して順調に離陸することができる、と述べています。
現在までに、中国民間航空では計585機の輸送機にHUDが装備されており、その割合は18.9%です。 中国民用航空局が2012年8月に発表した『ヘッドアップディスプレイ応用発展ロードマップ』によると、 2020年までに輸送機における装着率は50%に達する見込みです。
装着数が年々増加するにつれ、フライトの正常性に対するHUDの貢献はますます大きくなると予想されます。
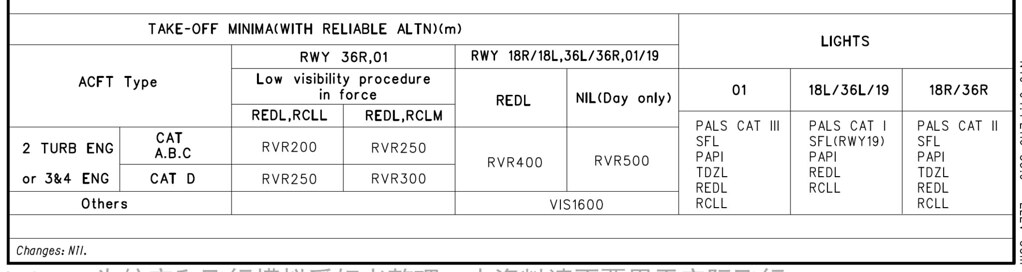
北京首都空港の離陸基準を調べてみたところ、 やはり200メートルだった。
-
フルサイズとAPS-Cカメラの被写界深度の比較
一般に、フルサイズカメラは撮像素子の面積が大きく、画質が良いことは知られています。 しかし、飛行機を撮影する場合、APS-Cの焦点距離(換算)の方が有利になる場面もあります。 いったいどの機種を使うべきか、確かに頭の痛い問題です。
以下では、キヤノン 5D4 と 7D2 を例に、フルサイズ機と APS-C 機において被写界深度にどのような違いがあるのか見ていきましょう。
例えば、100メートル先の被写体を撮影する場合、 7D2 で焦点距離 200mm、絞り F7.1 で撮影すると、
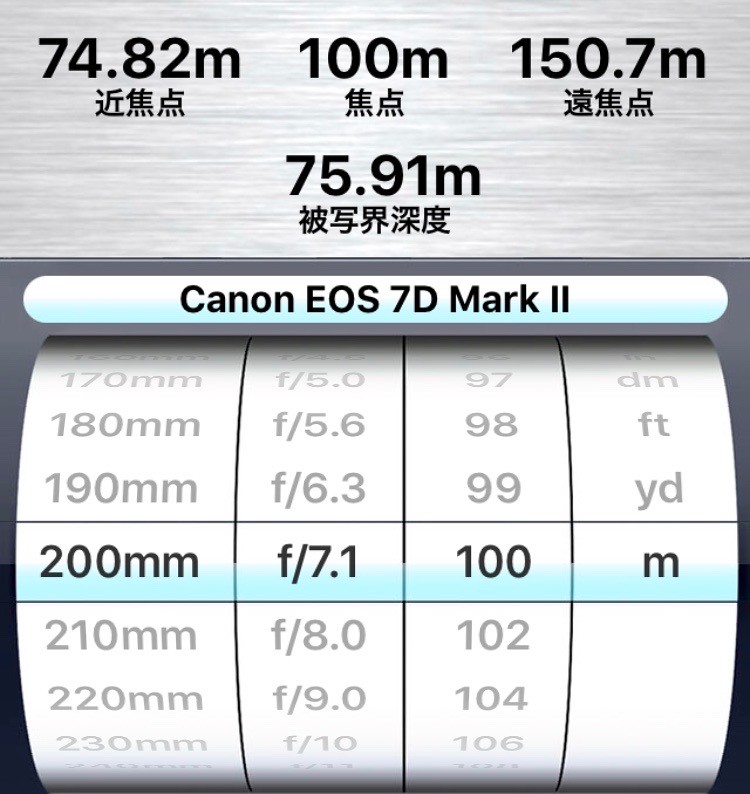 被写界深度は 75メートルとなります。
被写界深度は 75メートルとなります。同じ被写体を 5D4 で撮影するには、焦点距離 320mm が必要です。
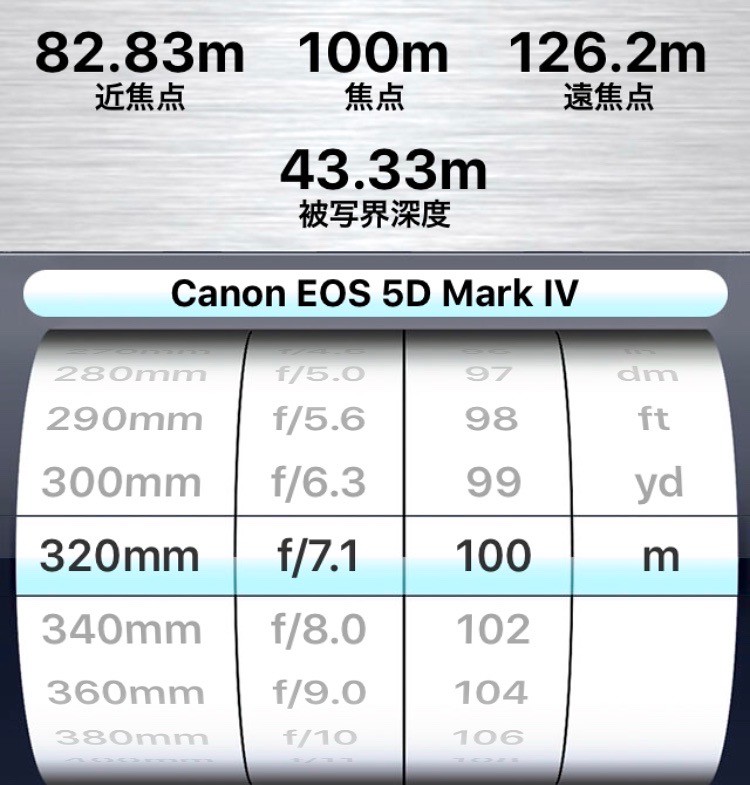 そのため、被写界深度は 43メートルしかなく、7D2 よりもかなり浅くなります!!
そのため、被写界深度は 43メートルしかなく、7D2 よりもかなり浅くなります!!同様の被写界深度を得るためには、絞りを F11 まで絞る必要があります。
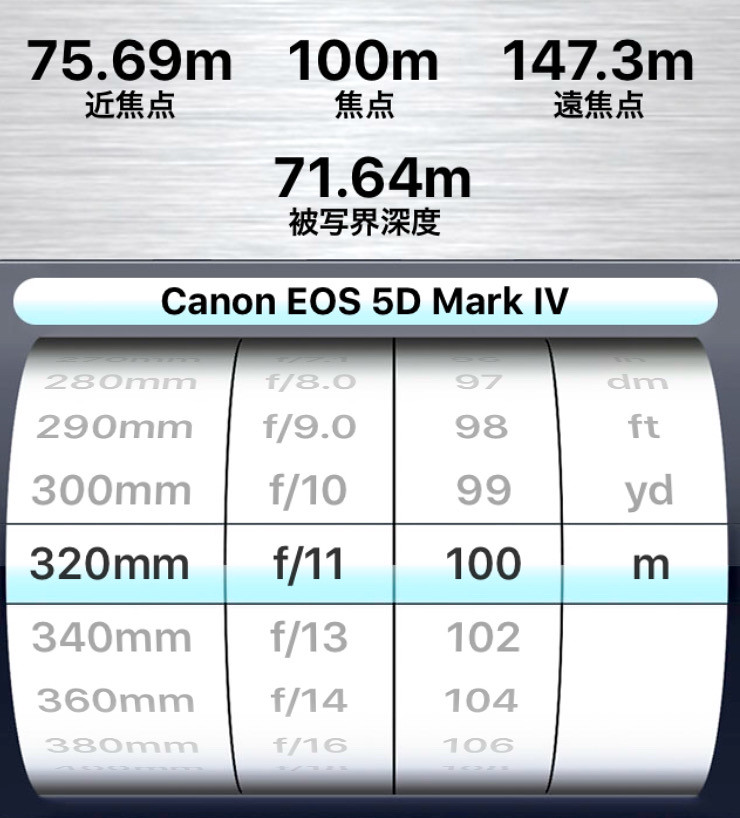 このときの被写界深度は 71メートルで、7D2 とほぼ同じになります。
しかし、絞りを絞るということは、当然ながら入光量が減ります。
暗い場所での撮影時に十分な明るさを得るには ISO 感度を上げるしかなく、
これは画質に大きな悪影響を及ぼします。
このときの被写界深度は 71メートルで、7D2 とほぼ同じになります。
しかし、絞りを絞るということは、当然ながら入光量が減ります。
暗い場所での撮影時に十分な明るさを得るには ISO 感度を上げるしかなく、
これは画質に大きな悪影響を及ぼします。したがって、大きな被写界深度が必要なシーンでは、フルサイズ機にこだわらない方が良いようです。 逆に、ボケ味を生かしたいなら、フルサイズ機の方が優れた結果を出します。 つまり、機材の特性を理解し、被写体や撮影目的に合わせて最適な機材を選ぶのが正解なのです。
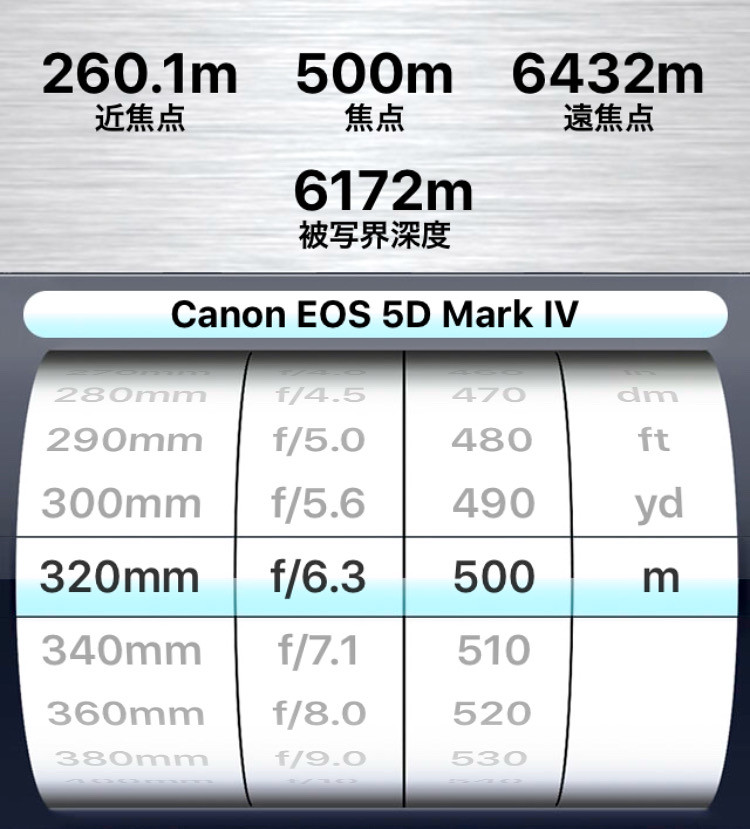
被写体がもう少し離れている場合、被写界深度への影響は少し小さくなります。 例えば 500メートル離れた場所から 7D2 で撮影し、絞りを F4.5 にすると、被写界深度は事実上無限遠になります。
 5D4 で撮影する場合、絞りを F6.3 にすると、被写界深度は 6キロメートルとなり、ほぼ変わりません。
5D4 で撮影する場合、絞りを F6.3 にすると、被写界深度は 6キロメートルとなり、ほぼ変わりません。
では、1000メートル離れている場合はどうでしょう。 7D2 で絞り F4.5 で撮影すると、被写界深度は無限遠です。
 5D4 で絞り F4.5 で撮影しても、被写界深度は無限遠です。
5D4 で絞り F4.5 で撮影しても、被写界深度は無限遠です。
 このように、距離が離れている場合、フルサイズと APS-C の被写界深度の差はほとんどなくなります。
このように、距離が離れている場合、フルサイズと APS-C の被写界深度の差はほとんどなくなります。 -
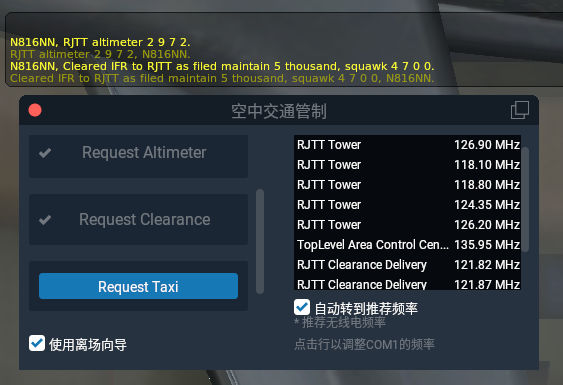
X-Plane 11.11 ATC航空交通管制機能レビュー
X-Plane 11.11r2でATC機能を使って少し飛んでみたところ、 XP11の航空管制の部分は、 巡航段階のナビゲーションがないことを除けば、自動化のレベルが以前より大幅に向上しており、非常におすすめです。 以下では、簡単にスクリーンショットを貼り付けて紹介します。
右上のATCアイコンをクリックして、空中交通管制ウィンドウを起動します。
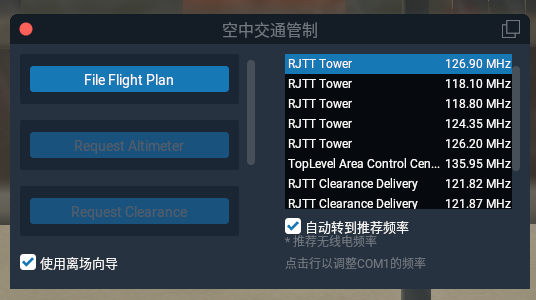 まだフライトプランを入力していないので、「File Flight Plan」ボタンが表示されています。
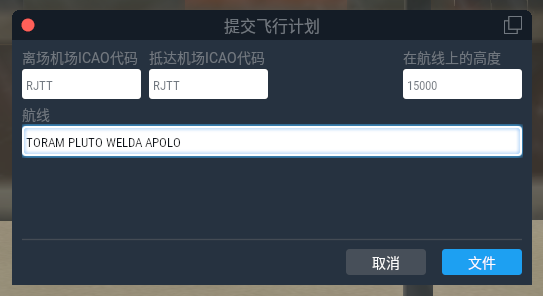
まだフライトプランを入力していないので、「File Flight Plan」ボタンが表示されています。「File Flight Plan」をクリックすると、空のフライトプラン送信ウィンドウがポップアップします。
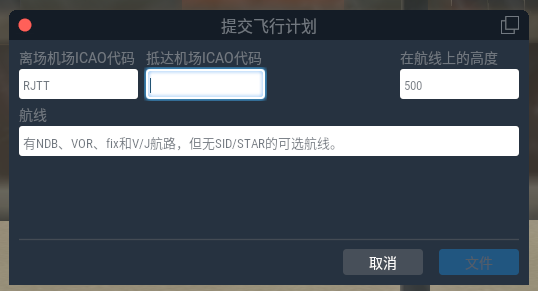
羽田の周りをちょっと一周するつもりなので、 <a href="/x-plane10/2017/11/garmin-d2charlie-garmin-pilot.>Garmin D2™Charlieチタニウム航空時計とGarmin Pilotの接続の内容をコピーして使います。
送信後、システムが自動的に「Clearance(クリアランス)」のリクエストに切り替わったことがわかります。
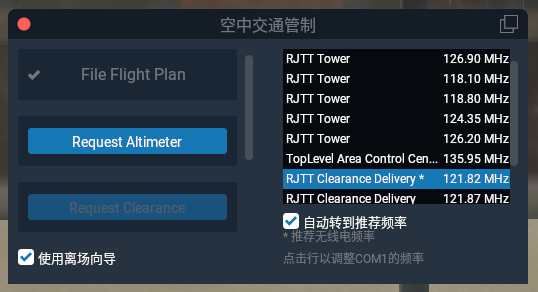 この機能は本当に素晴らしいです。自分で周波数を調整する必要がなく、
忙しいフライト中にとても安心です。
この機能は本当に素晴らしいです。自分で周波数を調整する必要がなく、
忙しいフライト中にとても安心です。まず高度計の設定を確認します。
 そして**Read back(復唱)**します。
そして**Read back(復唱)**します。

ほとんど待たされることなく、フライトプランが承認されました。
 復唱します。
復唱します。
 「Request Taxi」ボタンが表示されました。
「Request Taxi」ボタンが表示されました。それでは滑走(タキシイング)を開始しましょう、リクエストします。
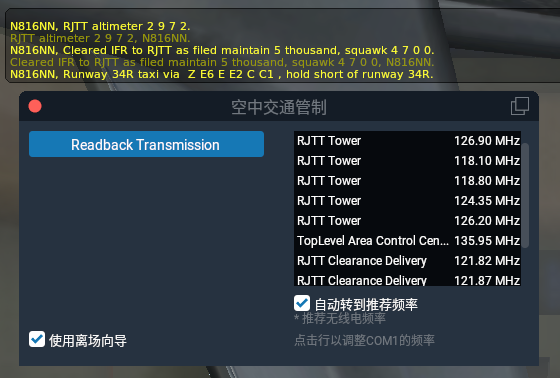 すぐに地上ルートの返答が来ました。反応が本当に早いですね。
すぐに地上ルートの返答が来ました。反応が本当に早いですね。
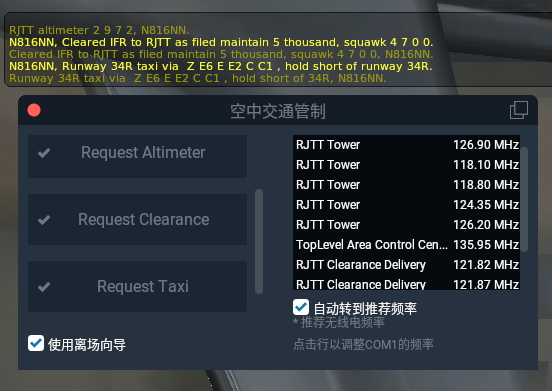 復唱して、出発です。
復唱して、出発です。

南へ進みます。
 そして左折し、滑走路34Rの先頭へ向かいます。
そして左折し、滑走路34Rの先頭へ向かいます。

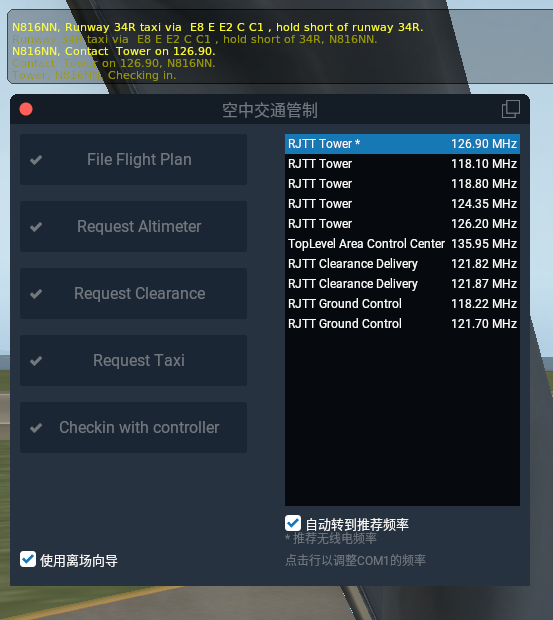
管制官が地上管制の周波数から塔への切り替えを指示してくれました。
 素直に復唱します。
素直に復唱します。
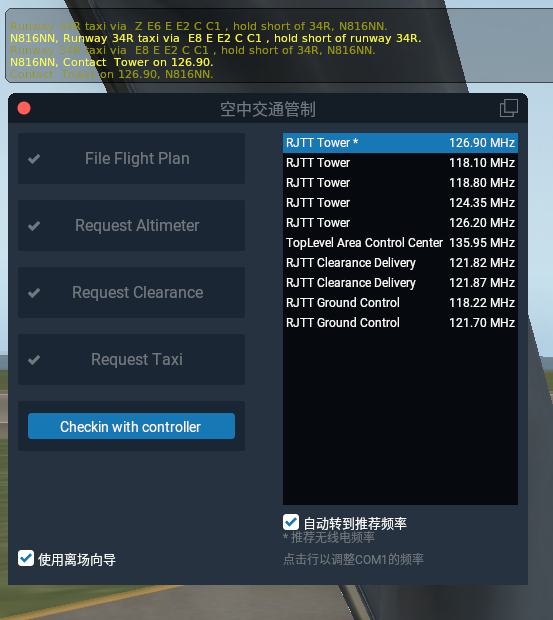 システムがまた親切にも自動的に周波数を切り替えてくれたことがわかります。
システムがまた親切にも自動的に周波数を切り替えてくれたことがわかります。塔にCheckin(コンタクト)します。
 すぐに離陸許可を取得!
すぐに離陸許可を取得!

復唱した後、すぐに離陸します。
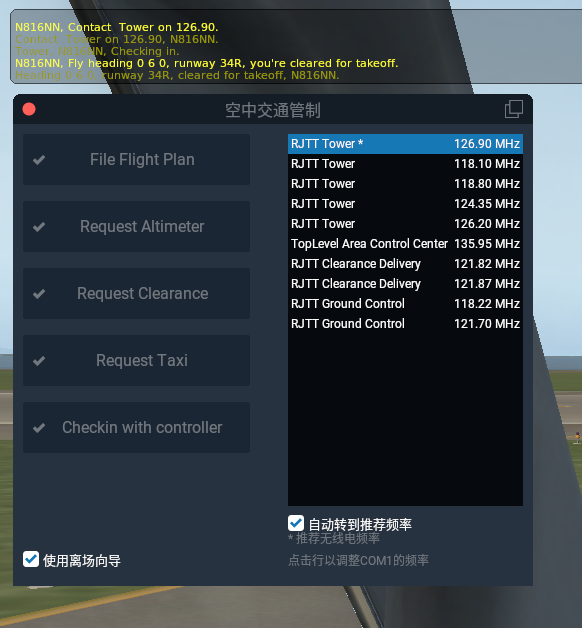
離陸直後、センターへの切り替え指示を受けました。
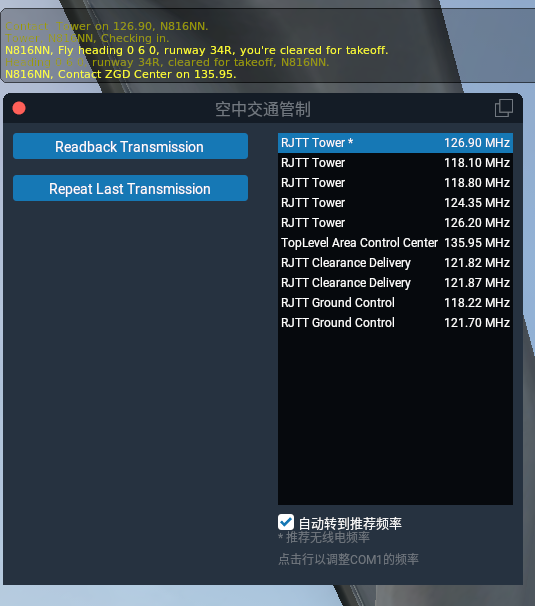 引き続き復唱し、センターにコンタクトします。
引き続き復唱し、センターにコンタクトします。
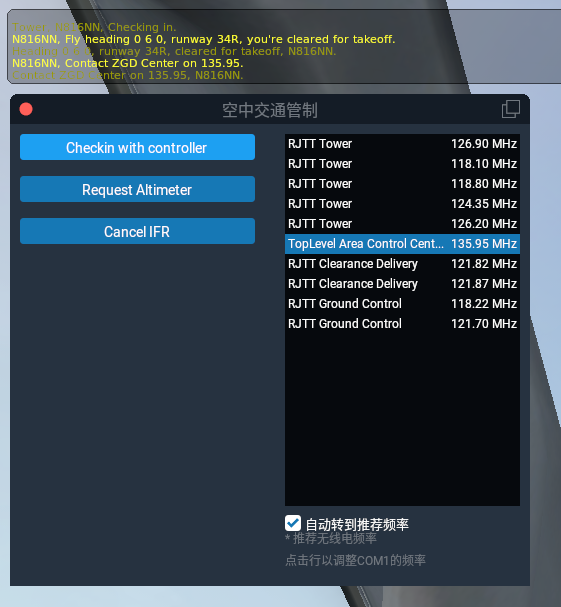 HDG 220の指示を受けました。
HDG 220の指示を受けました。
 続いて新しい指示を受け、この区間の飛行はなかなか良い感じでした。
続いて新しい指示を受け、この区間の飛行はなかなか良い感じでした。
 すぐに復唱します。
すぐに復唱します。
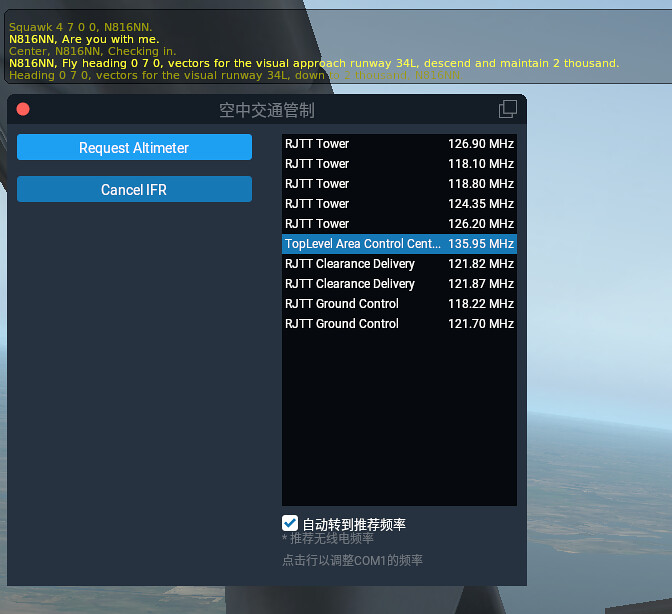
旋回後、新しい針路と高度の指示を受けました。
 向きを変えると、前方の空港と滑走路がかすかに見えてきました。
向きを変えると、前方の空港と滑走路がかすかに見えてきました。
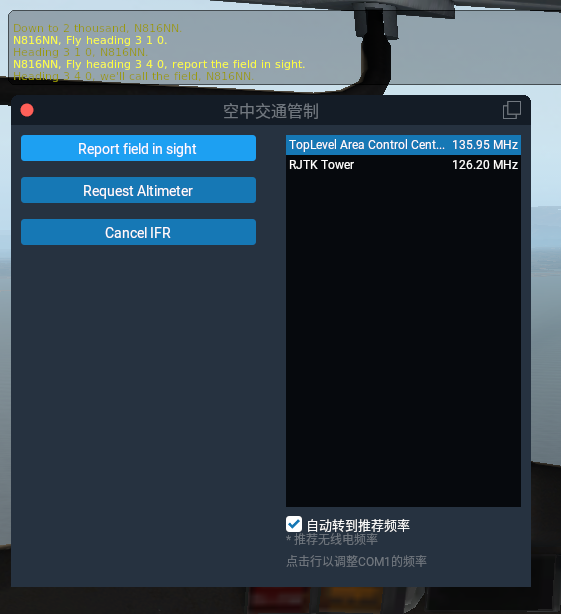 そこで「Report the field in sight(空港視認を報告)」します。
そこで「Report the field in sight(空港視認を報告)」します。
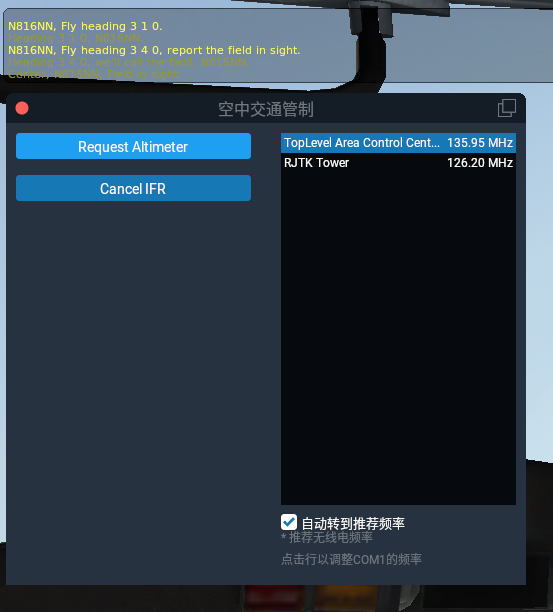 順調にいっているようです。
順調にいっているようです。 -
X-Plane 11.20のVR機能は素晴らしい
X-Plane 11.20betaからVRデバイスのサポートが開始されました。 公式のX-Plane 11.20 VR Beta Instructionsによると、条件は以下の通りです:
Windows 7 64 bits or newer operating system HTC Vive or Oculus Rift 1 or more VR controllers Steam VR installed
私はWindows PCも持っていませんし、HTC ViveやOculus Riftのデバイスも持っていません。 そのため、皆さんの報告を待つことになります。
You Can Use VR With Any Edition of X-Plane 11にはハードウェアに関する解説がありますが、 実物がないと理解するのは難しいです。 そこでYouTubeで探してみたところ、いくつかの解説がなかなか良いので、ここで紹介します。
-
羽田へ小旅行の旅 ルフトハンザ5つ星塗装機を撮影する その2
<a href="/x-plane10/2017/12/5starhansa.>前回の記事に続き、Airliners.net (A-Net) にアップロードした写真をメインにお届けします。
お昼、国際線ターミナルで撮影したガルフストリーム G550。 VP-CFG Gulfstream Aerospace G-V-SP Gulfstream G550 (C-37B) <img src=https://imgproc.airliners.net/photos/airliners/9/9/5/4758599.jpg?v=v47bcf4e7de8>
去年の夏、旧友の家族が東京に遊びに来たとき、羽田空港まで出迎えに行きました。 当時、彼らが搭乗したのがこの南航空のA330-200でした。 <img src=https://imgproc.airliners.net/photos/airliners/3/4/6/4758643.jpg?v=v417afa3312f>
上海航空のA330-300とも縁があります。というのも、<a href="/x-plane10/about/shanghai-masters-2017.>上海ロレックス・マスターズ2017を観戦しに行った際に搭乗したのがこの機体だったからです。 <img src=https://imgproc.airliners.net/photos/airliners/9/1/0/4759019.jpg?v=v40884e844a1>
フィリピン航空のA330-300。どうやら羽田発着の国際線では、昼の主力機種がA330のようです。 <img src=https://imgproc.airliners.net/photos/airliners/3/0/1/4770103.jpg?v=v44e297cf238>
この写真はほとんど補正なしでA-Netにアップロードしました。そのため、光線と空気の状態が良ければ、現像作業で手を加えることがほとんどなくなります。 有名な写真家の皆さんは「RAW撮影はしない」とおっしゃることがよくありますが、それは完璧な光を捉える技術をお持ちだからであり、当然ながら後からの補正も不要になるのでしょう。 写真とは、要するに光と影を記録する行為に過ぎません。しかし、光を読み解くことのできる目を持つのは本当に容易ではありません。 これこそが、我々アマチュアとプロの写真家の之间的な差なのだと思います。
午後は第2ターミナルへ移動。北海道国際航空(Air Do)のカラーリングは撮影が難しいことで定評があり、 以前はA-Netに何度もリジェクトされましたが、今回はようやく受理されました。 <img src=https://imgproc.airliners.net/photos/airliners/3/0/3/4770303.jpg?v=v4d26a09de05>
JA8997、この機体は20年機齢の古参の全日空エアバスA320ですが、あとどれくらい現役でいられるのでしょうか? 新型のA320neoやA321neoが次々と就航し始めていますからね。 <img src=https://imgproc.airliners.net/photos/airliners/1/3/3/4759331.jpg?v=v4768a89c0d8> 機体の上部には「2020年東京オリンピック」を記念した文字が入っています。 中国語に訳すなら「団結一心、喜迎2020奥运(一丸となって2020年オリンピックを迎える)」といったところでしょうか。
2008年の北京オリンピックを現地で観戦した際の光景が、昨日のことのように記憶に新しいです。時間が経つのは本当に早いものです。 私自身が08年からスマートフォン(iPhone)を使い始めましたが、当時は想像もしていませんでした。 わずか数年の間に、中国のモバイル産業がこれほどまでに驚くべき発展を遂げるとは。 AlipayやWeChat(微信)を代表とする数多くのサービスが世界の最先端を走っており、痛く感心させられます。
<img src=https://imgproc.airliners.net/photos/airliners/5/6/3/4770365.jpg?v=v4aeef8c9eb2> 第2ターミナルの展望デッキで実際に最も目にするのは、このような通常カラーリングの全日空の機体です。 機体の上部にWi-Fiアンテナを取り付けた飛行機が増えていますね。 最近、全日空や日本航空はメディアで機内免费Wi-Fiの広告を強力にプッシュしていますが、 私はまだ使ったことがありません。次回はぜひ試してみたいと思います。
2018/1/11 更新 羽田発着の国際線航班機について、昼のアジア路線でA330が多いという点を再度調査したところ、 以下の航空会社も運航していることが分かりましたので、併せて掲載します。 長栄航空(EVA Air)のA330-300 <img src=https://imgproc.airliners.net/photos/airliners/1/5/4/4783451.jpg?v=v4f17f6bfc3e>
中国国際航空(Air China)のA330-300 <img src=https://imgproc.airliners.net/photos/airliners/7/7/4/4783477.jpg?v=v4f70c741f26>
-
羽田へお出かけ、ルフトハンザ5つ星塗装機を撮影してくる
最近忙しくて、久しぶりに飛行機を撮りに出かけました。
こんなニュースを見かけました。ルフトハンザ、欧州初のSkytrax つ星航空会社に、
ロイター通信によると、ルフトハンザ航空はSkytraxの5つ星認定を取得し、欧州初の5つ星航空会社となった。激しい市場競争で旅客の支持を勝ち取るため、ルフトハンザは機材の更新や客室の改修などを通じて継続的に旅客体験を向上させている。
そしてルフトハンザ航空が5つ星航空会社に昇格、欧州唯一5つ星航空会社の称号を祝して、ルフトハンザ航空はボーイング747とエアバスA320を1機ずつ5つ星塗装(スペシャルカラー)にした。
ちょうどこのボーイング747-8の"5 Starhansa"塗装機が東京に来ていたので、空港まで撮影しに行きました。 <img src=https://imgproc.airliners.net/photos/airliners/1/4/0/5007041.jpg?v=v4d2fc9dc502>

 やはり747のフォルムはカッコいいですね。
やはり747のフォルムはカッコいいですね。また、ルフトハンザのもう一つの羽田行き路線の機材がA340からA350に切り替わったので、
 ついでに撮影してきました。
でも今やA350は増えすぎて新鮮味がないので、やはりA340の方が貴重です。
ついでに撮影してきました。
でも今やA350は増えすぎて新鮮味がないので、やはりA340の方が貴重です。

本日また、Go-around(復飛)する便に遭遇しました。 機体番号JA738Jの日本航空のボーイング777-300です。
 Go-around中でもエンジンの騒音はそれほど目立ちません。
優しく機首を上げて旋回していく様子を眺めると、
その飛行ルートは先日見た<a href="/x-plane10/2017/08/goaround. target="_blank" rel=“noopener noreferrer”>目前でのGo-aroundその2とほぼ一致しています。
Go-around中でもエンジンの騒音はそれほど目立ちません。
優しく機首を上げて旋回していく様子を眺めると、
その飛行ルートは先日見た<a href="/x-plane10/2017/08/goaround. target="_blank" rel=“noopener noreferrer”>目前でのGo-aroundその2とほぼ一致しています。19分後に無事着陸しました。その周回はかなり大規模でした。

そういえば、今回初めてA321neoを撮影できたのも小さな収穫でした。

まず国際ターミナルに行ってルフトハンザ747のSpot in(到着)を撮り、 それから第2ターミナルへ移動して離陸を撮り、 日が暮れかけると第1ターミナルへ走って夜景を一枚。



とはいえ、個人的に一番好きなのはこういう写真です。
 滑走路の中間から機体が引き上がり、
撮影者の目の前で力強く上昇していくその姿が最も動きがあり、
何度撮っても飽きません。
滑走路の中間から機体が引き上がり、
撮影者の目の前で力強く上昇していくその姿が最も動きがあり、
何度撮っても飽きません。 -
Garmin D2 Charlie チタン航空時計のデータとアプリの更新方法
<a href=Garmin D2 Delta PXチタン航空時計開封の記
<a href=Garmin D2 Delta PXチタン航空時計設定入門編D2 Charlieでは、地図、航空ナビゲーションデータベース、アプリ、ウィジェット、ファームウェアなど、頻繁にアップデートが必要なデータがあります。
例えば、時計自体のOSについて、 米国Garminの公式サイトでD2 Charlie ソフトウェア バージョン 3.20が公開され、 いくつかのバグ修正や新機能の追加が行われた場合、ファームウェアの更新が必要になることがあります。 (どうやら中国語版はまだリリースされていないようです。)
時計本体のソフトウェア更新には、PCのWebUpdaterアプリケーションを使用する必要があります。 そのUIは以下の通りです:
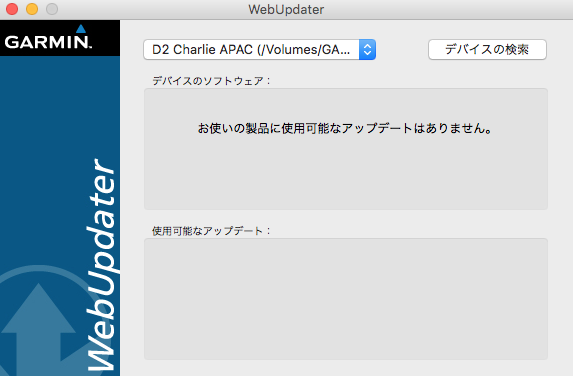 プログラムが新しい更新を検出すれば、画面に表示されます。
プログラムが新しい更新を検出すれば、画面に表示されます。地図の更新には、PC用の別のアプリケーションGarmin Expressが必要です。 ダウンロード、インストール、設定が完了したら、専用のUSBケーブルで時計をPCに接続します。 Garmin Expressがデバイスを検出して表示されます。

D2 Charlieをクリックすると、詳細な地図データが表示されます。
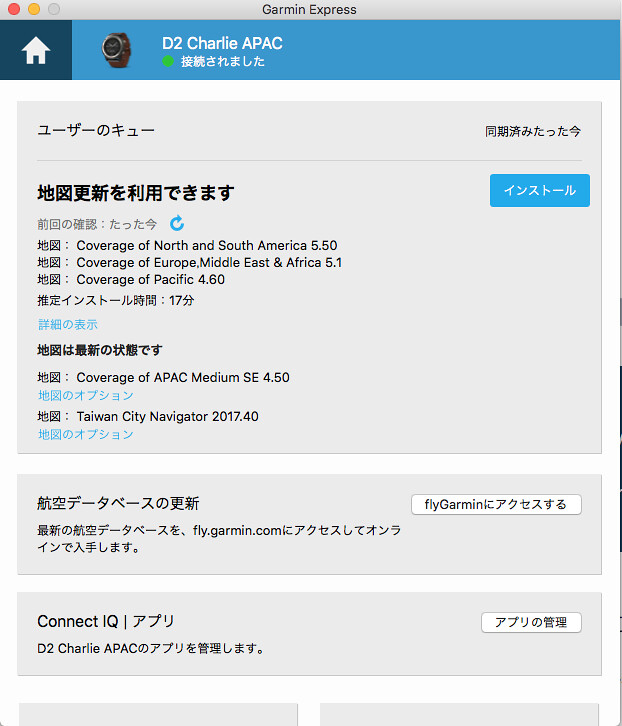 ここでは、アメリカ、ヨーロッパ、太平洋地域の地表地図を更新できますが、
アジア太平洋地域の地表地図と台湾の都市ナビ地図はすでに最新版です。
ここでは、アメリカ、ヨーロッパ、太平洋地域の地表地図を更新できますが、
アジア太平洋地域の地表地図と台湾の都市ナビ地図はすでに最新版です。そこで青い「Install」ボタンをクリックします。
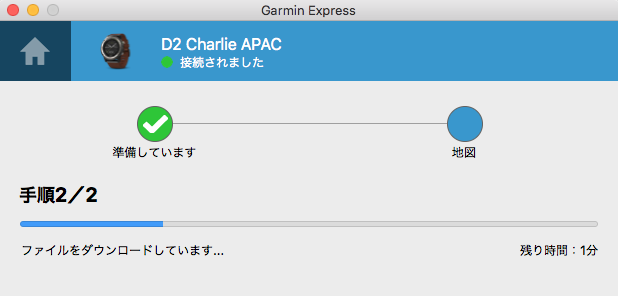 数分後、すべての地図の更新が完了します。
数分後、すべての地図の更新が完了します。

航空ナビゲーションデータベースの更新にはfly.garmin.comを使用します。 これは<a href="/x-plane10/2017/11/garmin-d2charlie-set. target="_blank" rel=“noopener noreferrer”>Garmin D2™Charlieチタン航空時計初期設定編で詳しく紹介したので、
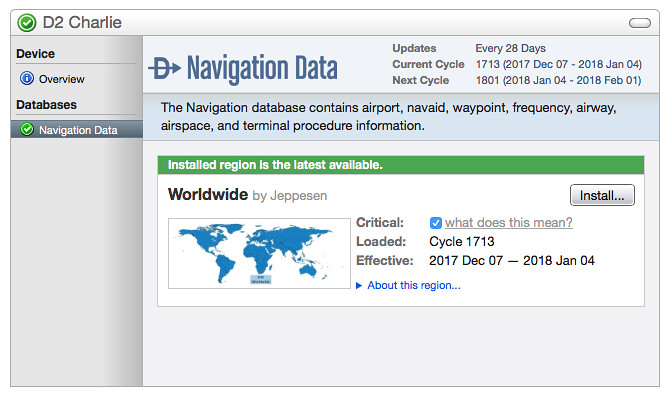 ここでは割愛させていただきます。
ここでは割愛させていただきます。文字盤(Watch Face)、アプリ、ウィジェットの更新は、Garmin Connectのスマホアプリを使用します。


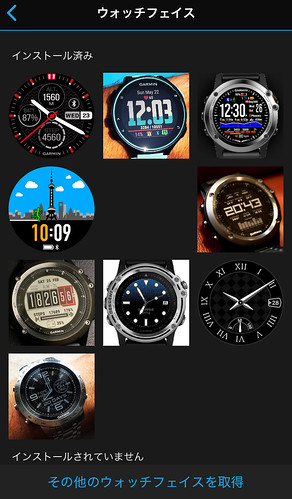 または、concect.garmin.comウェブサイトを使用し、
Connect IQ Storeからお気に入りを選ぶだけです。
使い方はiOSやAndroidのApp Storeと同様ですので、ここでは詳しくは説明しません。
または、concect.garmin.comウェブサイトを使用し、
Connect IQ Storeからお気に入りを選ぶだけです。
使い方はiOSやAndroidのApp Storeと同様ですので、ここでは詳しくは説明しません。Charlieの発売を記念して、11/23〜12/22に発売記念ウェブキャンペーンが開催されており、 D2 Charlieを購入してネットでシェアすれば、安捷飛行訓練センター(Angi Flight Training Center)提供のフライト体験プレゼントに抽選で応募できます。
 この千載一遇のチャンスをお見逃しなく。
この千載一遇のチャンスをお見逃しなく。 -
Garmin D2 Charlie チタン航空時計の自己診断モード
ある日、うっかりD2を床に落としてしまいましたが、拾い上げて外見を確認したところ、傷一つなくホッとしました。 この腕時計にはこれほど多くのセンサーが内蔵されていることを考えると、 内部に問題があった場合、どうやって確認すればよいのでしょうか? ネットで情報を探したところ、Garminの腕時計には自己診断モードがあることがわかりました。 そこで、D2 Charlieで試してみることにしました。
まず左上の「LIGHT」ボタンを長押ししてクイックメニューを開き、 「電源を切る」を見つけたら、右上の「Direct-to」を押して電源を切ります。 その後、もう一度「LIGHT」を押して腕時計を起動し、 文字盤にGarminのロゴの三角形が表示されたら、 左下の「DOWN」を押し続けます。約30秒後に腕時計が自己診断モードに入ります。
 この画面では各センサーの数値が表示されます。
右上の「Direct-to」を押すと、バイブレーション機能のテストが可能です。
この画面では各センサーの数値が表示されます。
右上の「Direct-to」を押すと、バイブレーション機能のテストが可能です。
右下の「Nearest/Back」を押して次のテスト項目に進みます。
 これはカラーディスプレイのテストのようです。
「UP」と「DOWN」を押すと中央の四角形の大きさが変わり、
右上の「Direct-to」を押すと様々なテストパターンが表示されます。
種類が非常に多いので、ここでは画像をすべて紹介することはしません。
これはカラーディスプレイのテストのようです。
「UP」と「DOWN」を押すと中央の四角形の大きさが変わり、
右上の「Direct-to」を押すと様々なテストパターンが表示されます。
種類が非常に多いので、ここでは画像をすべて紹介することはしません。右下の「Nearest/Back」を押して次のテスト項目に進みます。
 ここはバックライトテストでした。「UP」と「DOWN」でバックライトの明るさを変更でき、
右上の「Direct-to」を押すとスポットの明るさを変更できます。
ここはバックライトテストでした。「UP」と「DOWN」でバックライトの明るさを変更でき、
右上の「Direct-to」を押すとスポットの明るさを変更できます。さらに右下の「Nearest/Back」を押してGPSテストに進みます。
 写真は市内で撮影したため数値はゼロのままでしたが、窓際に移動すると変化が見られます。
写真は市内で撮影したため数値はゼロのままでしたが、窓際に移動すると変化が見られます。右下の「Nearest/Back」を押してSNS加速度計テストに進みます。 X、Y、Zの3軸の加速度、磁気方位、コンパスの数値が確認できますが、 写真を撮るのを忘れてしまいました。
次はOHR(光学式心拍センサー)のテストです。
 なぜか心拍数が読み取れませんでした。
なぜか心拍数が読み取れませんでした。ANTテスト、これはアンテナのテストでしょうか?
 「Nearest/Back」でtest ONに設定でき、
「UP」で周波数を設定できますが、それ以外の表示は見られません。
「Nearest/Back」でtest ONに設定でき、
「UP」で周波数を設定できますが、それ以外の表示は見られません。次は気圧計テストです。
 単位はおそらくヘクトパスカル(hPa)でしょう。問題ないように見えます。
単位はおそらくヘクトパスカル(hPa)でしょう。問題ないように見えます。ここはBluetoothテストのようです。
 「Nearest/Back」でtest ONに設定し、
「UP」でチャンネルを変更、「DOWN」でデータ長を変更できますが、
文字盤上では特に変化が見られません。
「Nearest/Back」でtest ONに設定し、
「UP」でチャンネルを変更、「DOWN」でデータ長を変更できますが、
文字盤上では特に変化が見られません。続いてWi-Fiテストです。
 操作方法は上と同じで、
テストを開始すると、パケットエラーレートの数値が絶えず変化しているのがわかります。
操作方法は上と同じで、
テストを開始すると、パケットエラーレートの数値が絶えず変化しているのがわかります。下はバイブレーションテストです。
 これは比較的わかりやすく、「Nearest/Back」を押すと振動し、
「UP」でテストモードを変更できます。
Default、Short、Medium、Long、Extra Long、Alarm、Call、Goal、Move、Move Clear、Notification、Sync、Sync Fail、Key Press、Low Threat、High Threatなど、多数のモードがあります。
これは比較的わかりやすく、「Nearest/Back」を押すと振動し、
「UP」でテストモードを変更できます。
Default、Short、Medium、Long、Extra Long、Alarm、Call、Goal、Move、Move Clear、Notification、Sync、Sync Fail、Key Press、Low Threat、High Threatなど、多数のモードがあります。最後は終了画面ですね。
 「LIGHT」を長押しすると腕時計を再起動できます。
「LIGHT」を長押しすると腕時計を再起動できます。一通りテストを行い、D2 Charlieの信頼性がさらに増しました。 本当に安心できる製品です。
Charlieの発売を記念して、11/23〜12/22に発売記念ウェブキャンペーンが実施されています。 D2 Charlieを購入してネットでシェアすれば、安捷飛行訓練センター(Angry Flight Training Center)が提供する空中フライト体験に抽選で当たります。
この千載一遇のチャンスをお見逃しなく。 -
X-Plane 11.10 が登場
X-Plane 11.10 Is Here! X-Plane 11.10 Official Release Available X-Plane 11.10 Release Notes 開発者ブログを見たら、11.10の正式版がリリースされたそうですね。 アップグレードして確認したところ、すでにベータ版を脱退しており、 バージョンはRelease Candidate 3。つまり、もうすぐ安定版に入るということです。
公式の紹介によると、X-Plane 11.10のハイライトは以下の通りです。
-
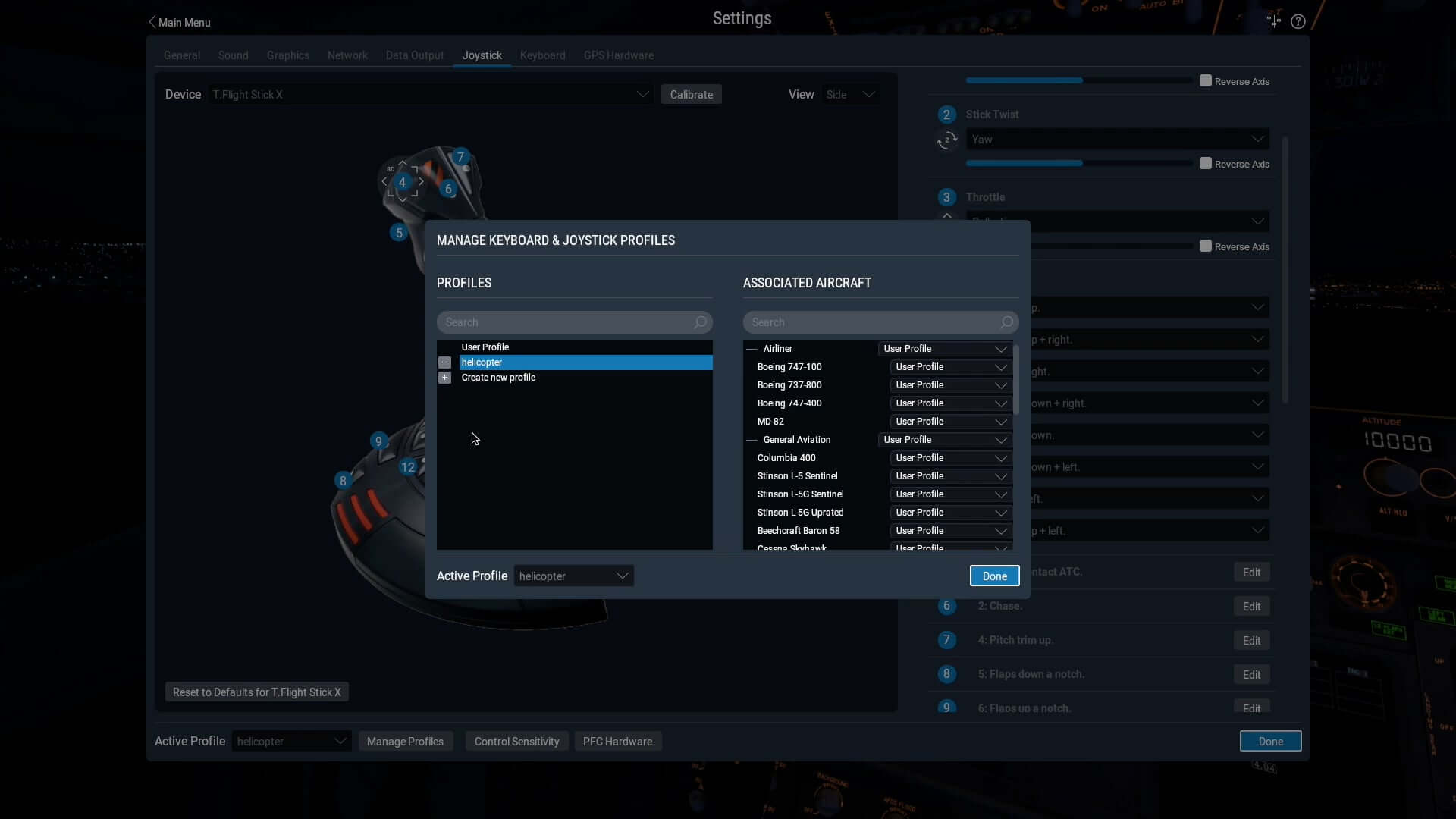
キーボードやジョイスティックなどのハードウェア設定をそれぞれ保存(Joystick & Keyboard Profiles) ハードウェアのプロファイルは、機体やシナリオごとに保存できるようになりました。 例えば、セスナ172を飛ぶときとボーイング737を飛ぶときのキー設定を変えていても、 現在では機体ごとにそれぞれ保存することができます。
-
ロンドンランドマーク(London Landmarks)
 テストしてみようと思いましたが、ダウンロードに4、5時間かかることが判明。時間があるときに試してみましょう。
テストしてみようと思いましたが、ダウンロードに4、5時間かかることが判明。時間があるときに試してみましょう。 -
Garmin 1000ナビゲーション計器(Highly Functional G1000) このバージョン最大のハイライト。 これについては、<a href="/x-plane10/2017/11/x-plane-11-g1000.>X-Plane 11上の G1000ナビゲーション計器初探で既に紹介しました。
-
Autogen & Scenery Objects 新しいシーナリーモデルが追加されました。
 詳細はNew Objects & Buildings Increase Variety in X-Plane 11.10をご覧ください。
詳細はNew Objects & Buildings Increase Variety in X-Plane 11.10をご覧ください。 -
Kiosk Mode 展示会などのデモ用に使用できる新しいモード。 これにより、設定がどのように変更されても保存されなくなります。 Kiosk Mode in X-Plane 11.10
-
Situation Filesの改善 フライト中のシチュエーショントレーニングは非常に重要であり、この機能は様々なシチュエーションを保存できます。 例えば、特定の空港でのILS着陸訓練、本場5辺、濃霧の中での離陸など。 練習したいときに読み出して使用するだけです。
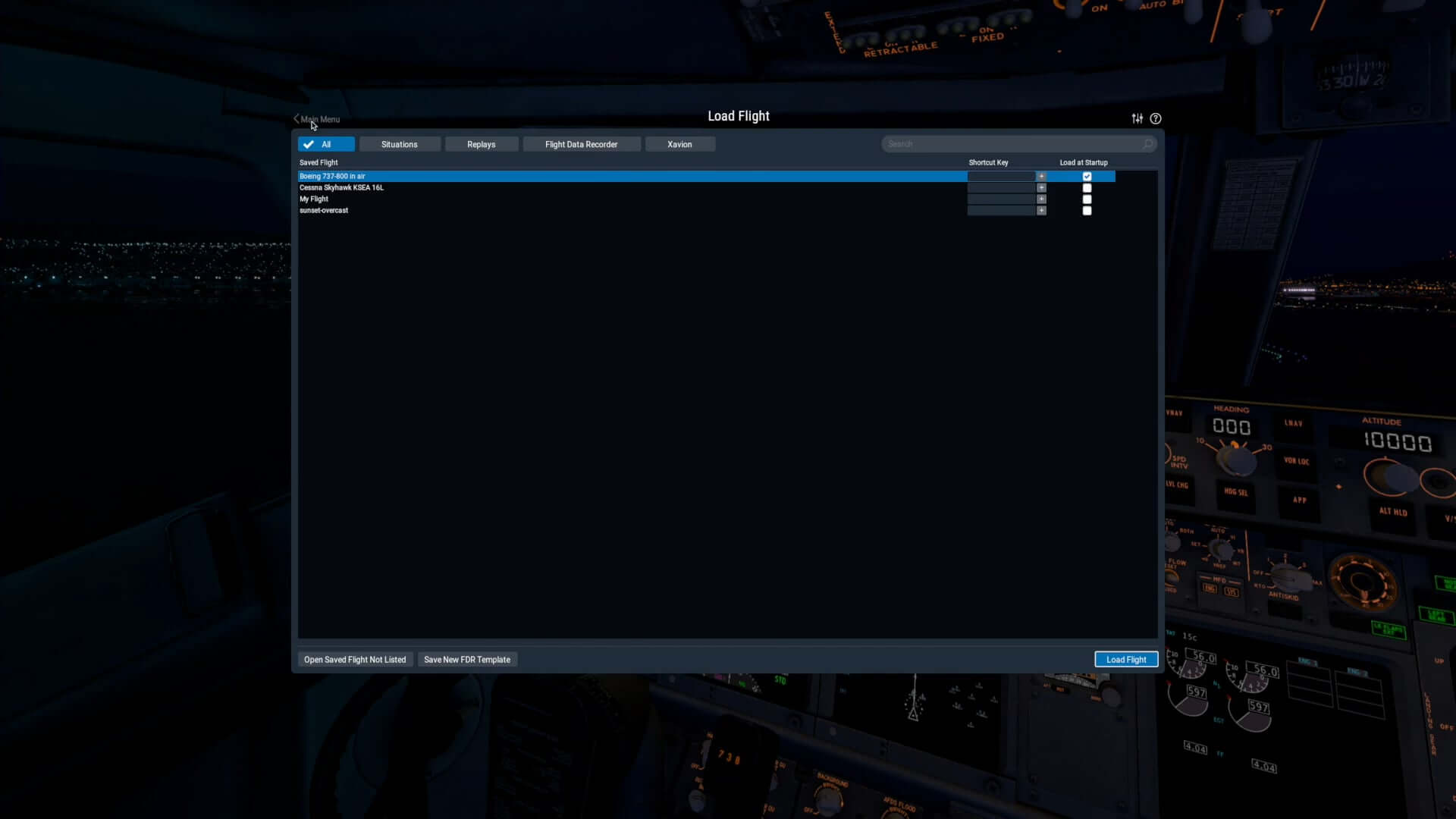 X-Plane 11.10 Situation File Improvements
X-Plane 11.10 Situation File Improvements
-
-
Garmin D2 Charlie チタン製航空時計 使用レビュー その2
<a href=Garmin D2 Delta PXチタン航空時計 開箱レポート
<a href=Garmin D2 Delta PXチタン航空時計 設定ガイド今年最強のスマートウォッチであるGarmin D2 Charlieの使用感を引き続き書きます。 今回は、一般のスマートフォンユーザーの視点からまとめてみました。
設定についてですが、デフォルト設定を変更できる点の一つがバックライトです。 例えば、手首を上げると自動的にバックライトが点灯する機能は非常に便利です。 ただし、メニューの階層がかなり深く、 場所は「設定-システム-バックライト-アクティブ中-手首を上げる-オン」と「設定-システム-バックライト-非アクティブ中-手首を上げる-オン」の中にあります。 また、バックライトの消灯時間と輝度もカスタマイズ可能で、 個人的にはデフォルト値は少し暗いと感じたため、時間と輝度を少し上げました。
スマートフォンとの接続については、自分は基本的に1日24時間Bluetoothで接続しているので、 毎日受信するプッシュ通知は100件を超えます。
 15分後の会議のリマインダー、重要ニュースの配信、重要なスポーツの試合結果、
友人のツイート、Yahoo!やAmazonのセール情報、地下鉄の遅延などの情報を、
リアルタイムで手首で確認できます。
15分後の会議のリマインダー、重要ニュースの配信、重要なスポーツの試合結果、
友人のツイート、Yahoo!やAmazonのセール情報、地下鉄の遅延などの情報を、
リアルタイムで手首で確認できます。*注意 中国大陸版を購入したユーザーは、屋内でBluetoothがスマートフォンに接続できない問題に遭遇する可能性があります。 屋外に出てGPS信号を受信して初めて接続できるようになります。 Garmin Pilotを使用する場合は、Garmin Connectアプリで新しいメールアドレスを使用し、詳細設定で中国以外の地域を選択して再登録してください。
時計でスマートフォンの音楽再生をコントロールすることも日常的な習慣になりました。 例えば、スマートフォンをカバンに入れたまま取り出さずに音量調整したり、次の曲にスキップしたりできます。



また、健康への意識が大幅に高まりました。 1日に何歩歩いたか、どのくらいの距離を移動したか、 どれくらいの熱量を消費したか、睡眠時間などの指標が手元にあるので、 自然と体を動かそうという気になります。




ある朝、時計で天気予報を確認したところ晴れだったので、近くの小山に登りに行きました。 遠くに富士山を眺めて非常にリフレッシュしました。
 最後にGarmin D2 Charlieと富士山の記念撮影をしました。
最後にGarmin D2 Charlieと富士山の記念撮影をしました。

晩秋の紅葉が見頃だったので、北鎌倉へ紅葉狩りに行きました。


Garmin D2 Charlieの「アクティビティのトラッキング」APPを開いて記録した結果は以下の通りです。
 所要時間2時間52分、距離6.3km、消費カロリー720kcal、平均速度2.2km/h、高度140m。
このような完璧な記録は、D2 CharlieがGPSや高度計などの高精度センサーを搭載しているおかげです。
この時計は本当に強力な個人のツールです。
所要時間2時間52分、距離6.3km、消費カロリー720kcal、平均速度2.2km/h、高度140m。
このような完璧な記録は、D2 CharlieがGPSや高度計などの高精度センサーを搭載しているおかげです。
この時計は本当に強力な個人のツールです。 -
Garmin D2 Charlie タニタム航空時計使用感想 その1
<a href=Garmin D2 Delta PXチタン航空時計 開箱レポート
<a href=Garmin D2 Delta PXチタン航空時計 設定ガイドGarmin D2 Charlieを使い始めて丸一週間、使用感をまとめてみよう。
まず第一に、これは非常に優れたスマートウォッチだ。 例えばカラー画面は解像度が高く、直射日光の下でも見やすい。 さらに省電力で、ここ数日簡単なテストをしたところ、2日使ってもまだ20%の残量があった。 だから常に電池切れを心配する必要がなく、安心して各種機能を思い切り使える。 なお、各種ナビゲーションやスポーツ機能を使わず、単に時計として見るだけであれば、1週間持つのも問題ないだろう。
操作方法もシンプルで自然だ。慣れればキーやボタンの位置を見なくても、感覚だけで操作できるようになる。例えばウォッチモードで「DOWN」ボタンを3回押せば、気圧計のミニアプリなどを起動できるなどだ。 一般的なスマートウォッチはタッチスクリーンを採用しており、電池を消費するだけでなく、操作時も必ず画面を見なければならないが、D2のような純粋なボタン操作は多くの場面で非常に便利だ。
航空愛好家の観点からすると、天気には非常に敏感だ。 だから、気圧計、高度計、GPS、地図、コンパスを備えた腕時計で、 近くの滑走路のMETARデータを自動的にダウンロードして気圧補正もできる。 これほど完璧な航空計器が手元にあるなんて、本当に不思議な気分だ。
気圧の補正には手動モードもあり、自分のいる場所と近くの空港の気圧値が異なる場合でも、 簡単に調整できる。 この操作はパイロットがコックピット内で行う高度計の気圧設定と全く同じであり、 フライトシミュレーション愛好家にとっては、この操作にはきっと親しみを感じるはずだ。 またD2 Charlieの気圧計は非常に正確で、 私の経験では、通常プラスマイナス1ヘクトパスカル調整するだけで、かなり正確な高度値が得られる。
会社でエレベーターに乗り、高度計の針と数値が階数に合わせて上昇していくのを見る、 この習慣はちょっと「オタク」かもしれないが、自分では楽しんでいる。
 (下の1018HPAは、現時点で設定された気圧補正値1018ヘクトパスカルです。使用方法については、本サイトの気圧高度計の使い方にある「高度計気圧設定窓(Kollsman window)」の紹介部分を参照してください。)
(下の1018HPAは、現時点で設定された気圧補正値1018ヘクトパスカルです。使用方法については、本サイトの気圧高度計の使い方にある「高度計気圧設定窓(Kollsman window)」の紹介部分を参照してください。)この気圧計を見れば、2日以内の天気の変化傾向がわかる。 おや、晴れが一日続いた後はまた曇りだな。

コンパスの針は地上でも非常に便利だ。例えばGoogleマップでナビしている時に「北へ300メートル進んでください」と言われる。 問題は「北がどこだ?」だ。 こういう時、手首を上げて時計を見ればすぐにわかる。

もちろん空港の気象通報METARを見るのはこんなに簡単で、しかも電池も気にする必要がない。

 毎日、手首を上げて天気を確認する回数が激増した。
毎日、手首を上げて天気を確認する回数が激増した。*注意 中国大陸版を購入したユーザーは、室内でBluetoothに接続できない問題に遭遇する可能性があります。 屋外でGPS信号を受信してからでないと接続できません。 Garmin Pilotを使用する必要がある場合は、Garmin Connectソフトウェアで新しいメールアドレスを使用し、詳細設定から中国以外の地域を選択して再登録してください。
ただし、システムデフォルトのMETARミニアプリよりも、Connect IQ StoreのMETAR/TAFの方が多少便利です。 より多くの空港情報を表示できるからで、お勧めです。

空港へ航空機撮影に行く時、マニュアルを調べる必要がなく、手首を上げるだけで周波数/滑走路などの情報が得られる。 特に見知らぬ空港に出かける時は、荷物をかなり減らすことができる。






-
X-Plane 11搭載のG1000ナビゲーションシステム初探
<a href="/x-plane10/2017/11/x-plane1110b8-g1000. target="_blank" rel=“noopener noreferrer”>X-Plane11.10b8へのアップグレードとG1000のお試しを書いた後、G1000の使い方に興味を持ちました。 Garminの公式サイトからGarmin G1000 Pilot’s Guide for Cessna Nav IIIのマニュアルをダウンロードしました。 600ページを超える文書ですが、冒頭部分しか読んでいませんが、 その操作はG530と非常によく似ていることがわかりました。 <a href="/x-plane10/2017/09/xplane11-g530.>X-Plane 11 G530ナビゲーター使用チュートリアルで紹介した使用方法はすべて使用可能で、 UIを設計する際、操作互換性についてはかなり熟慮されているようです。
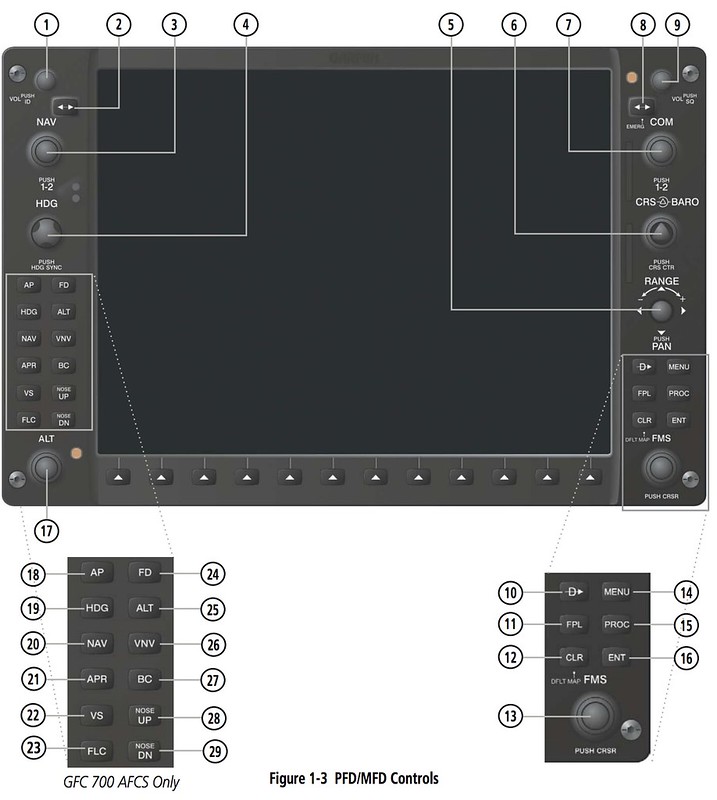
例えばフライトプランを設定する場合、操作ボタンは右下にあります。
 12のCLRボタンを長押しして地図モードに入り、もう一度11のFPLボタンを押してフライトプラン入力画面を開きます。
次に13の大きな調整ノブを使って、カーソルを追加したい行に移動させます。
13の中央のボタンを押すとハイライト表示され、ノブを使ってウェイポイントを設定します。
ウェイポイントが決まったら、16のENTボタンを押してデータの入力を確定します。
14のメニューMENUボタンを押すと機能メニューが有効になり、保存や削除の操作を行います。
また、10はダイレクト(直飛)、15のPROCはアプローチ、到着または出発の標準手順です。
12のCLRボタンを長押しして地図モードに入り、もう一度11のFPLボタンを押してフライトプラン入力画面を開きます。
次に13の大きな調整ノブを使って、カーソルを追加したい行に移動させます。
13の中央のボタンを押すとハイライト表示され、ノブを使ってウェイポイントを設定します。
ウェイポイントが決まったら、16のENTボタンを押してデータの入力を確定します。
14のメニューMENUボタンを押すと機能メニューが有効になり、保存や削除の操作を行います。
また、10はダイレクト(直飛)、15のPROCはアプローチ、到着または出発の標準手順です。オートパイロットについては、操作ボタンは左下にあります。
 18と24はオートパイロットAPとフライトディレクターFDの有効化、
19は針路headingナビゲーションの有効化、headingの指定は4のHDGノブで行います。
25は高度altの維持有効化、高度の設定には17のALTノブを使用します。
20は水平ナビゲーションNAVの有効化、26は垂直ナビゲーションVNVの有効化、
21はアプローチナビゲーションARPの有効化、27は復帰BCの有効化です。
22は垂直速度VSの設定、23は高度層変換FLCの設定、
28と29はノーズアップとノーズダウンの設定です。
6のノブは針路COURSEの設定、5は地図のスケールズームノブです。
18と24はオートパイロットAPとフライトディレクターFDの有効化、
19は針路headingナビゲーションの有効化、headingの指定は4のHDGノブで行います。
25は高度altの維持有効化、高度の設定には17のALTノブを使用します。
20は水平ナビゲーションNAVの有効化、26は垂直ナビゲーションVNVの有効化、
21はアプローチナビゲーションARPの有効化、27は復帰BCの有効化です。
22は垂直速度VSの設定、23は高度層変換FLCの設定、
28と29はノーズアップとノーズダウンの設定です。
6のノブは針路COURSEの設定、5は地図のスケールズームノブです。全体的に見て、基本操作はそれほど難しくはなさそうです。 少し練習すればすぐに慣れることができるでしょう。
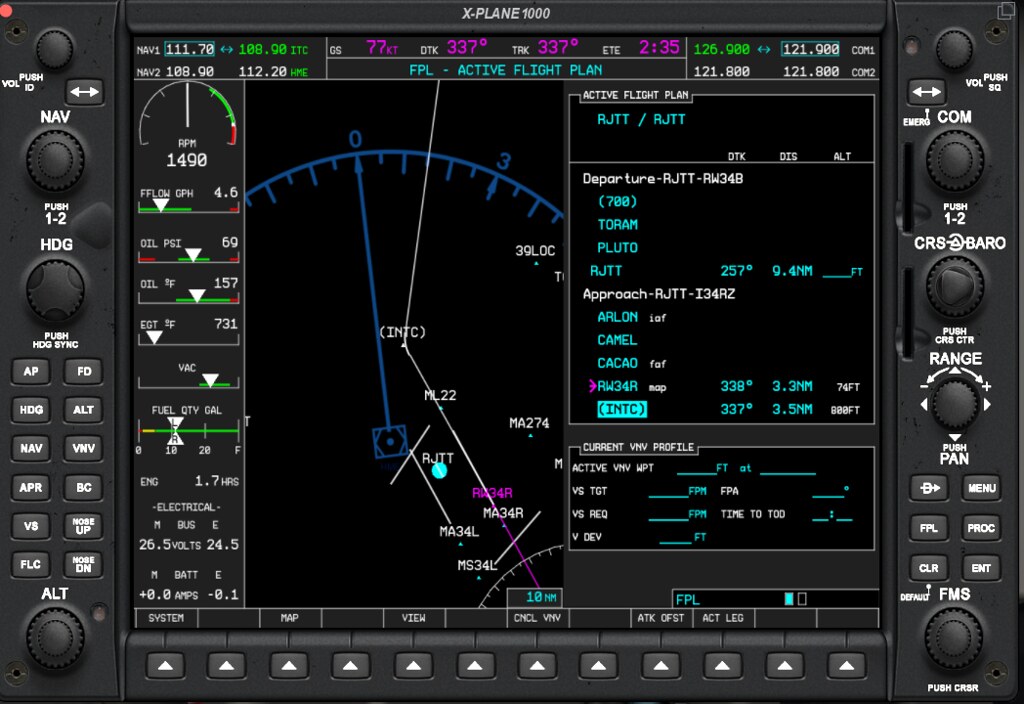
再び羽田空港でテストを行い、最終アプローチを34R ILSとしました。
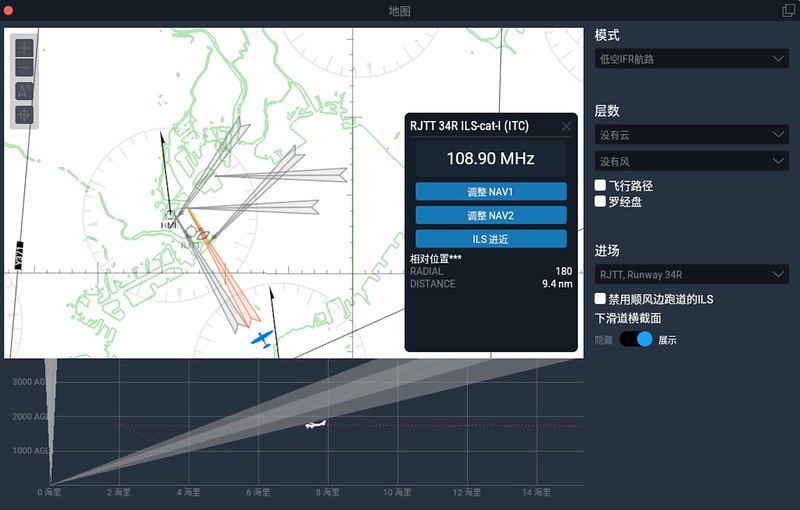
 MFDとPFDを拡大して詳細を見てみましょう。
MFDとPFDを拡大して詳細を見てみましょう。

シミュレーター計器を使ってC172を手動で飛ばして数年、 いきなりデジタルグラスコックピットに入り、完全にオートパイロット、 飛行操作はボタンを数回押すだけになり、 正直、あまり慣れることができませんでした。