飛行制御
-
X-Planeの3D Flight Pathを使って着陸を練習する
ILS進入着陸の練習方法や、無線航法援助施設へのアライメント、グライドスロープなどの質問をよく見かけます。 実は、X-Planeはプレイヤーのために非常に便利なツール「3D Flight Path」を用意しており、この機能を有効にするだけで、ILS進入着陸の練習が非常に簡単になります。
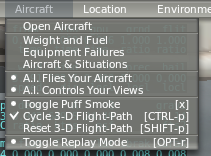
使用方法は非常にシンプルです。 X-Plane 10では、Aircraftメニューから「Cycle 3-D Flight-Path」を選択します。 X-Plane 11では、X-Plane Menu –> View –> “Cycle 3-D Flight Path” を選択します。
 次に、NAV1の周波数を滑走路のILS周波数に合わせます。
滑走路の反対側から見渡すと、X-PlaneがILS信号に基づいて、空中に降下経路の概略図を描き出します。
次に、NAV1の周波数を滑走路のILS周波数に合わせます。
滑走路の反対側から見渡すと、X-PlaneがILS信号に基づいて、空中に降下経路の概略図を描き出します。

では、実際に飛行してみましょう。滑走路から約9海里、高度3000フィート強あたりで、3D Flight Pathの誘導領域に入ります。

信号を捕捉(Capture)したら、針路と高度をゆっくり調整します。

この時点での降下率は約500フィート/分です。グライドスロープとローカライザーは、いずれもほぼ中心に位置しています。

高度が徐々に下がり、PAPIもはっきりと判別できるようになります。スロットルを絞り、降着装置を下ろし、ピッチ角を引き起こします。

滑走路に接近するにつれて、外部視界の観察により意識を向ける必要があります。

この機能を使って数回練習すれば、手動でのILS進入着陸は決して難しいことではなくなるでしょう。
完
-
5つ星無料フライトシミュレーション教学サイトAviator90
今日、フライトシミュレーター教学サイト Aviator90という素晴らしいサイトを見つけました。ここには大量の無料教学内容が提供されており、おそらくオンライン上で最高の教学リソースの一つだと思います。強くお勧めします!!
このサイトでは、分かりやすいアニメーションを使って、飛行の基礎知識、操縦方法、フライトプランからクロスカントリーフライト(転場飛行)に至るまで、あらゆる面を紹介しており、本当に感心させられます。もちろん、コンテンツはすべて英語ですが、今後、中国語版や日本語版が登場することを期待しています。
彼らの教学内容は、まずこのpdfを通じて概要を知ることができます。
Aviator90 Introduction to Flight: Episode 1 - Lift (揚力) Episode 2 - The Other Three Forces Episode 3 - Controls (操縦装置) Episode 4 - Trim (トリム) Episode 5 - Cockpit (コックピット)
Aviator90 Basics of Flight: Episode 6 - Ground Ops (地上操作) Episode 7 - Takeoff (離陸) Episode 8 - Power Management (パワー管理) Episode 9 - Turns (旋回) Episode 10 - Pitch (ピッチ)
Aviator90 Local Manouvers and Airwork: Episode 11 - Traffic Pattern (トラフィックパターン) Episode 12 - Landing (着陸) Episode 13 - Flare (フレア) Episode 14 - Straight & Level (水平飛行) Episode 15 - S-Turns (S旋回) Episode16 - Point Turns (定点旋回) Episode17 - Steep Turns (急旋回) Episode18 - Stalls (失速) Episode19 - Slow Flight (低速飛行) Episode 20 - Short and Soft Ops (短距離・軟着陸滑走路での運用)
-
フライトシミュレーターにおけるヘリコプター操縦チュートリアル
注意:本文では、米国製の単ローター・ヘリコプターを例に説明します。 つまり、ローターが反時計回りに回転する航空機です。 欧州製の航空機は一般的に時計回りに回転するため、 回転の反作用トルクを相殺するために、ペダル(テールローター)の操作方法は米国製の航空機とは逆になります。
ヘリコプターの操縦練習のため、最近新しいジョイスティックを購入しました。 CH Products Fighterstick USBフライトスティック、

また、ヘリコプター操縦入門の本を買って、理論知識を猛勉強し、 十数時間の練習を経て、ようやく少し上達しました。以下で詳しく説明します。
まず知っておくべきことは、ヘリコプターの操縦は一般的な固定翼機とは大きく異なるということです。下図を見てください。
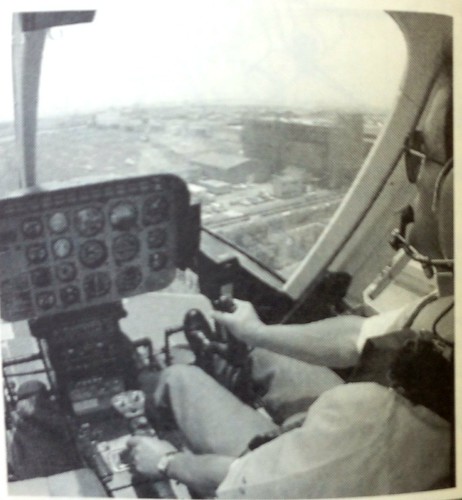 その要点は以下の通りです:
1 機長席は右側にあります。
2 ヘリコプターにはセスナ172のような操縦桿(Yoke)はありません。
3 パイロットは右手でサイクリック・スティック(Cyclic Control/周期変距操縦桿)を操作し、機体のピッチおよびロール姿勢を制御します。
その要点は以下の通りです:
1 機長席は右側にあります。
2 ヘリコプターにはセスナ172のような操縦桿(Yoke)はありません。
3 パイロットは右手でサイクリック・スティック(Cyclic Control/周期変距操縦桿)を操作し、機体のピッチおよびロール姿勢を制御します。
 ヘリコプターが前後に移動するには機体のピッチ姿勢を変える必要があることに注意してください。
スティックを倒して機首を下げると、機体は前方に飛行します。以下の図のように:
ヘリコプターが前後に移動するには機体のピッチ姿勢を変える必要があることに注意してください。
スティックを倒して機首を下げると、機体は前方に飛行します。以下の図のように:

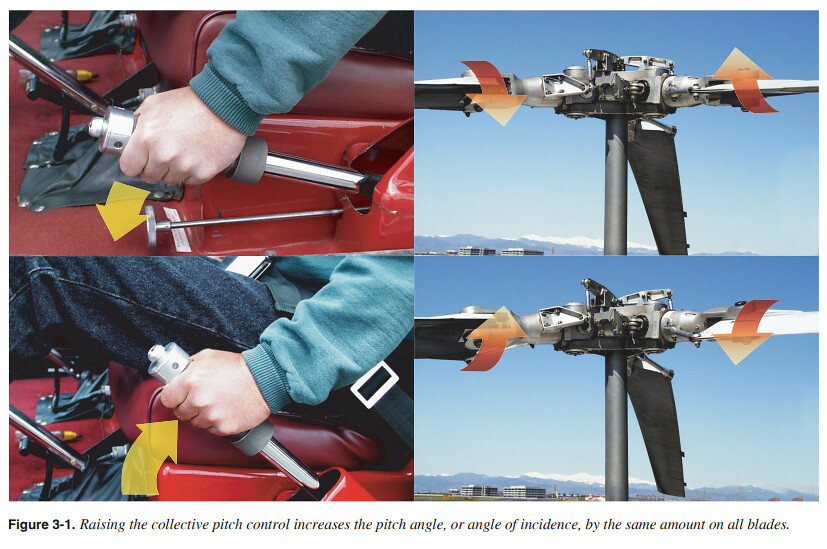
4 パイロットは左手でコレクティブ・ピッチ・コントロール(Collective Pitch Control/総距操縦桿)を操作し、 ローターの迎え角を変えることで機体の上昇と降下を行います。
 パイロットが左手でレバーを引き上げると、ブレードのピッチが同時に同じ角度だけ増加してローターの揚力が増加し、逆に揚力は減少します。
パイロットが左手でレバーを引き上げると、ブレードのピッチが同時に同じ角度だけ増加してローターの揚力が増加し、逆に揚力は減少します。
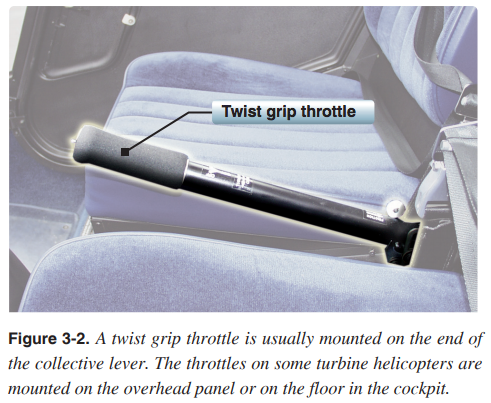
通常、総距操縦桿のグリップには回転式スロットル機構が設置されており、オートバイのスロットルコントロールに似ており、 エンジンスロットルの大きさを調整するために使用されます。そのため、この操縦桿は総距スロットルレバーとも呼ばれます。
5 ペダル(Anti-torque Pedals/反トルクペダル)も不可欠であり、 航空機のヨー姿勢を操縦するために使用されます。この点は固定翼機と同じです。

単ローター・テールローター付きヘリコプターの場合、ペダルは操縦系統を通じてテールローターのピッチ制御装置に接続されており、 テールローターピッチの大きさを制御してテールローターが発生する横力を調整し、針路を制御する目的を達成します。 単ローター・ノンテールローター(NOTAR)ヘリコプターの場合、ペダルを通じて機体尾部の排気量の大きさを制御して横力を調整します。 ツインローターヘリコプターの場合、ペダルが制御するのは2つのローターの総ピッチの差動であり、 つまり一方が増加し他方が減少し、2つのローターの反トルクが釣り合わなくなることで、機体に針路の変位を生じさせます。
次に、X-Plane内のハードウェア設定方法を見てみましょう。 メニューのSettings/Joystick & Equipment/Axisでの設定は以下の通りです:
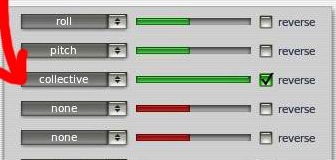 固定翼機と同様に、ピッチ、ロール、ヨーの3軸設定はそのままで、
コレクティブの部分を追加します(上図ではヨーは表示されていません)。
固定翼機と同様に、ピッチ、ロール、ヨーの3軸設定はそのままで、
コレクティブの部分を追加します(上図ではヨーは表示されていません)。もう一つ注意すべき点は、一部のヘリコプター機体ではガバナー(Governor)設定をオンオフできることです。
 GOVをオンにすると自動スロットルが有効になり、手動でスロットルを制御する必要がなくなるため、スロットル操作は不要になります。
GOVをオンにすると自動スロットルが有効になり、手動でスロットルを制御する必要がなくなるため、スロットル操作は不要になります。私のCHフライトスティックには元々3軸あるので、スティックをピッチとロールに設定し、 左側のスロットルノブをコレクティブに変更すればOKです。 ペダルは現在の<a target="_blank" href=“https://www.amazon.com/gp/product/B000H67DDY/ref=as_li_tl?ie=UTF8&camp=1789&creative=9325&creativeASIN=B000H67DDY&linkCode=as2&tag=yinlei-20&linkId=77EFW6HC2MKUMA3Q"サイテック・プロフライト・ラダーペダル Saitek Pro Flight Rudder Pedalを引き続き使用し、 設定項目はとてもシンプルです。 また、<a target="_blank” href=“https://www.amazon.com/gp/product/B00006B84X/ref=as_li_tf_tl?ie=UTF8&camp=1789&creative=9325&creativeASIN=B00006B84X&linkCode=as2&tag=yinlei-20"このジョイスティックにはピッチ軸とロール軸のハードウェアトリムノブがあり、 この機能はヘリコプターの操縦に非常に便利です。
-
X-Plane 10 小型機のVORおよびNDB計器ナビゲーション 入門
X-Plane 11が登場しました!最新のレポート<a href="/x-plane10/2016/11/installing-x-plane-11-demo.>X-Plane 11無料デモ版のインストールと試飛行をご覧ください!
セスナ172を例に、X-PlaneにおけるVORとNDBの使用方法を解説します。
まずは比較的簡単なNDBとADFからです。 機体に搭載されたADF(Automatic Direction Finder、自動方向探知器)は比較的シンプルなナビゲーション機器であり、 地上のNDB(Non Directional Beacon、無指向性無線標識)送信所がどの方向にあるかを指示することができます。 NDBはシンプルな無線送信機です。NDB信号には方位データが含まれているため、ADFは自動的に方向を見つけ出し、 計器に機首がNDB局を指している方向を表示します。
北京首都国際空港の近くを例に挙げましょう。マップモードを開くと、懐柔(Huairou)NDBが確認できます。
 HUAIROU NDBの周波数は380kHzですので、セスナ172のADF受信機の周波数も380に合わせます。
HUAIROU NDBの周波数は380kHzですので、セスナ172のADF受信機の周波数も380に合わせます。
 ADFの周波数表示と調整ノブは上図の右上方にあり、「ADF1」の表記が見えると思います。
周波数を合わせ、かつ機体がNDBの電波受信圏内にあれば、ADFの針が動き始めるのがわかります(上図の左下方)。
針の矢印がNDB局の位置を指しています。
矢印が指す方向へ機体を保って飛び続ければ、NDB局の上空に到達できます。
ADFの周波数表示と調整ノブは上図の右上方にあり、「ADF1」の表記が見えると思います。
周波数を合わせ、かつ機体がNDBの電波受信圏内にあれば、ADFの針が動き始めるのがわかります(上図の左下方)。
針の矢印がNDB局の位置を指しています。
矢印が指す方向へ機体を保って飛び続ければ、NDB局の上空に到達できます。VOR(Very High Frequency Omni-directional Range、超短波全方向式無線標識)についてですが、 その動作周波数帯は108.00 MHz ~ 117.95 MHzの超短波(VHF)帯であることから、その名が付きました。
VOR送信機から送信される信号には2つの種類があります:ひとつは位相が固定された基準信号。 もうひとつの信号の位相は、ビーコン局を取り巻く円周の角度に応じて連続的に変化します。 つまり、各角度から発射される信号の位相はそれぞれ異なります。 360度(磁北を指す)に発射される信号は基準信号と同相(位相差0)であり、 180度(磁南を指す)に発射される信号は基準信号と180度の位相差を持ちます。
航空機側のVOR受信機は、受信した2つの信号の位相差に基づいて、 自機がビーコン局のどの角度から発射される信号上にいるかを計算することができ、 これによりVORを使用して、機体のVOR局に対する相対的な方位を特定することができます。
首都空港の近くにある懐柔(Huairou)VORの周波数は113.6MHzです。 したがって、セスナ172のナビゲーション受信機NAV1(NAV1とNAV2の2つ搭載されています)の周波数を113.6に合わせます。
 次に、NAV1の指示器を見てみます。
次に、NAV1の指示器を見てみます。
 OBS(Omni Bearing Selector、全方位選択器)ノブを調整し、
白色の垂直線であるコース偏差指示器(CDI, Course Deviation Indicator)の針が円形指示器の正中央にくるようにします。
この時、コースインジケーターの黄色い「TO」矢印が指している数字が、VOR局の方位となります。
例えば上図では、懐柔VORは機体の40度の方向にあることを示しています(実際には少し中心からずれていますので、もう少し調整が必要です)。
したがって、機体は40度の針路に沿って飛び続ければ、そのVORに到達できます。
OBS(Omni Bearing Selector、全方位選択器)ノブを調整し、
白色の垂直線であるコース偏差指示器(CDI, Course Deviation Indicator)の針が円形指示器の正中央にくるようにします。
この時、コースインジケーターの黄色い「TO」矢印が指している数字が、VOR局の方位となります。
例えば上図では、懐柔VORは機体の40度の方向にあることを示しています(実際には少し中心からずれていますので、もう少し調整が必要です)。
したがって、機体は40度の針路に沿って飛び続ければ、そのVORに到達できます。