航空知识笔记
-
CDM(協議意思決定)システムとリリースに関する略語
覚えきれないなら、まず以下の用語を暗記しよう。
ところで、中国民用航空局(CAAC)の空管局・空管部が運営する協議的意思決定(CDM)特集ウェブサイトには、非常に優れた資料が多く、参考になる価値が高い。
CDM (Collaborative Decision Making) 複数空港の離陸承認における協議的意思決定システム
STD (Scheduled Time of Departure) スケジュールされたドア開け/閉め时刻。航空会社が申請し承認されたフライトスケジュール上の时刻。
SOBT (Scheduled Off Block Time) スケジュールされたオフブロック时刻(スポットからの離脱时刻)
COBT (Calculated Off Block Time) 計算されたオフブロック时刻。CDMシステムが CTOT と VTT に基づいて算出した、予想オフブロック时刻。
EOBT (Estimated Off Blocks Time) 予想オフブロック时刻。FPL データの項目 13、フィールド B の内容。
TOBT (Target Off Blocks Time) 目標オフブロック时刻。航空会社が地上業務を完了できる最も早い时刻。
CTOT (Calculated Take Off Time) 計算された離陸时刻。CDMシステムが総合的な計算に基づいて提示する予想離陸时刻。
VTT (Variable Taxi Time) 可変タキシング時間。CDMシステムが駐機スポット、離陸用滑走路、タキシー経路、交通状況などに基づいて算出する、離陸またはスポットへの着(入構)前に要するタキシング時間。
TSAT (Target Start-Up Approval Time) 目標エンジン始動承認时刻。CDMシステムが CTOT と VTT に基づいて計算し、航空管制が発行する目標のプッシュバック(推出)时刻。
ASBT (Actual Start Boarding Time) 実際の搭乗開始时刻。航空会社が実際に旅客の搭乗を開始した时刻。
-
EDTO vs ETOPS
以前撮った写真を振り返っていたら、このエアバスA330の機体に「EDTO」の文字があることに気づきました。

以前はETOPSしか知りませんでしたが、実はEDTOもあるんですね。それぞれの定義を見てみましょう。資料は国際民間航空機関(ICAO)の公式サイトからのものです。
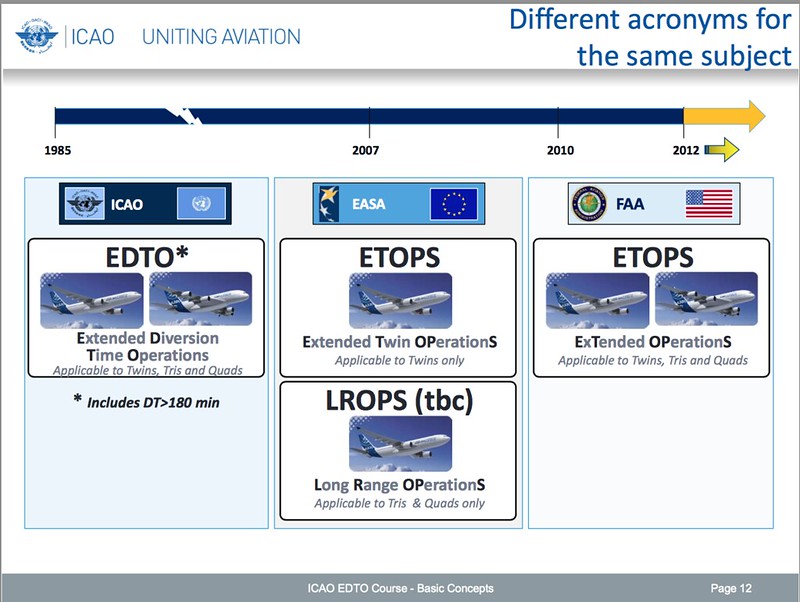 ETOPSとEDTOは、同じ「延長運用」に対する異なる呼称です。
ICAOではEDTO(Extended Diversion Time Operations)と呼び、双発、三発、四発機を含みます。
一方、ヨーロッパではETOPS(Extended Twin OPerationS)と呼び、双発機のみを指し、三発および四発機にはLROPS(Long Range OPerationS)を使用します。
アメリカFAAのETOPS(ExTended OPerationS)も、双発、三発、四発機を含みます。
(以前はExtended-range Twin-engine Operational Performance Standardsと呼ばれていたのを覚えていますが、定義も進化しているようです)
ETOPSとEDTOは、同じ「延長運用」に対する異なる呼称です。
ICAOではEDTO(Extended Diversion Time Operations)と呼び、双発、三発、四発機を含みます。
一方、ヨーロッパではETOPS(Extended Twin OPerationS)と呼び、双発機のみを指し、三発および四発機にはLROPS(Long Range OPerationS)を使用します。
アメリカFAAのETOPS(ExTended OPerationS)も、双発、三発、四発機を含みます。
(以前はExtended-range Twin-engine Operational Performance Standardsと呼ばれていたのを覚えていますが、定義も進化しているようです)
中国民航の適合通告によると、延長運用とは、計画された飛行経路上に少なくとも1点存在し、そこから任意の代替空港までの距離が、標準条件下の静止大気中で、認可されたエンジン1基停止時の巡航速度で60分(タービン双発機)または180分(タービン三発以上の旅客機)で飛行できる距離を超える運行と定義されています。本通告における「延長運行」、「ETOPS」および「延伸航程运行」、「EDTO」は同義です。
この説明はなかなか回りくどいですね。。。 言い方を変えると、双発延長飛行(ETOPS)は、双発旅客機の安全な飛行を確保するために、国際民間航空機関が設けた特別な要件です。 双発機のエンジン1基または主要システムに故障が発生した際、残りの1基のエンジンで飛行し、規定時間内に最寄りの代替空港(ダイバート空港)へ到達できることが求められます。 例えば、「180分ETOPS」の認可を取得したということは、その型式の航空機が飛行する経路上のすべての地点で、最寄りの代替空港までの航続時間が180分を超えないことを意味します。 ETOPSルールは主に大洋横断飛行に適用されます。なぜなら、洋上では利用可能な代替空港が少ないためです。 もしETOPS能力がなければ、安全を確保するため、沿岸線に沿った航路を選択する必要があります。 ETOPS能力が高ければ高いほど、航空会社は双発機を使って、より多くの直行便を開設できることを意味します。
-
CVFPチャートを用いた目視飛行方式進近
鹿児島空港では4月から新しい目視飛行方式による進入、CVFP–KINKO VISUAL RWY34が加わりました。 これはまだ比較的珍しい方式で、自由度の高い通常の目視飛行手順に比べ、 CVFPは進入図に明確な航空路、目視参考地标、その他の飛行高度などの情報が記載されています。
以下、具体的な内容を見てみましょう。

まずは右下のISKIDウェイポイントを経過した後、航空機は海岸線に沿って飛行します。これはKGEの225度放射線に相当します。 このとき、図中に参照地标として描かれているSAKURAJIMA、つまり海の中にある有名な島——桜島が目視目標です。 この図は、確かに一目瞭然ですね。
航空機は海岸線に沿って別府河口付近まで飛行し、そこから右旋回してHKCの88度放射線に切り込ます。 このとき、コックピットから見える外部の目視基準——海岸線の形状も、図を通じて非常に明確に把握できます。
次の地标は海に浮かぶ小島です。HKCの88度放射線から見た島と海岸線の位置関係も、非常に役立ちます。 地図を見て、脳内でその位置関係を想像するだけよりもはるかに便利です。
最終進入段階ではKGEの336度放射線に切り込み、KGEから10.5DMEの地点での高度は3500フィート以上でなければなりません。
以上です。
-
オートパイロットの接続と解除のタイミング
この質問をよくいただいたり、検索エンジンから当サイトに訪れたりする方が多いので、具体的な例を見てみましょう。
今日はまず、<a href="/blog/ja/2013/02/-fcom-fctm-afm-qrh"上海航空のA321のフライトマニュアルにあるデータを使用します。「使用自动驾驶的最低高度(自動操縦使用の最低高度)」、「自动着陆(自動着陸)」、および「II类/III类操作(カテゴリーII/III運用)」などの節からの抜粋です。
異なる条件下では、最低高度の要件もそれぞれ異なることがわかります。
-
飛行機はどのように揚力を得るのか?ベルヌーイの定理、クッタ・ジュコーフスキーの条件、始動渦および翼端渦
航空機の飛行原理、つまり航空機の揚力がどこから生まれるのかという点について、 多くの書籍では「ベルヌーイの定理」に基づき、 気流が翼の前縁で上下の2つに分けられ、上部の気流は下部よりも速度が速いため、 上部の気圧は下部より低くなり、この上下表面の圧力差が揚力を生むと説明されています。
しかし、なぜ「上部の気流が下部より速い」という点が成立するのか、私は長い間納得できませんでした。 例えば、多くの説では、気流は翼の前縁で分割され最終的に後縁で合流すると言いますが、 翼の上下表面の形状は非対称であり、下部は平らで上部は隆起しているため、 上部を流れる気流の移動距離が長くなり、流速が自然と速くなるとされます。
しかし、この説は誤りです。なぜなら、紙飛行機や逆飛行する戦闘機の現象を説明できないからです。 NASAはこの説を「Longer path」または「Equal transit」理論と呼び、 公式サイトの<a href=“https://www.grc.nasa.gov/WWW/k-12/airplane/wrong1. target="_blank”>Incorrect theory #1 “Longer path” or “Equal transit” Theoryで解説しています。
また、「ベルヌーイの定理」に関連しない別の誤解として、揚力は翼の下面に対する空気の反作用力から生じるというものがあります。 これについてもNASAは<a href=“https://www.grc.nasa.gov/WWW/k-12/airplane/wrong2. target="_blank”>Incorrect theory #2, “Skipping stone” theoryで紹介しています。
では、最初の疑問に戻りますが、なぜ「上部の気流が下部より速い」のでしょうか? その説明として、航空機の揚力はクッタ・ジュコーフスキーの条件(Kutta―Joukowsky’s law)と**旋回(Vortex)**に関係しているというものがあります。
航空機が静止状態から加速して滑走路を走り始めた瞬間、翼の上下の気流速度は同じです。 そのため、下方の気流が後縁に到達した時点で、上方の気流はまだ後縁に到達しておらず、後方よどみ点は翼型の上方の点にあります。 下方の気流は、鋭い後縁を回り込んで上方の気流と合流しなければなりません。 上下の気流が合流した後、翼の後方へ流れていきますが、気流の乱れが見て取れます。
流体の粘性、すなわちコアンダ効果により、流体は本来の流れる方向を離れて、凸状の物体表面に沿って流れる傾向があります。 下方の気流が後縁を回り込む際、低圧の**旋回(Vortex)が形成され、 後縁に大きな逆圧力勾配が生じます。 やがて、この旋回(Vortex)**は来流によって押し流されます。これを「起始渦」と呼びます。

機体が前方へ進むにつれて、先ほどの起始渦によって生じたエネルギーが翼上部の気流に影響を与えます。 つまり、翼上部の気流を後方へ引っ張る効果が生まれます。

機体がさらに前進し、起始渦はその場に留まり、機体から切り離されます。
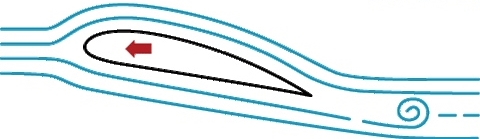
ヘルムホルツの渦定理によると、理想非圧縮性流体がポテンシャル力を受ける場合、 翼型の周りには起始渦と強度が等しく、方向が反対の渦が存在します。これを「循環」または「翼循環」と呼びます。 循環は翼型の下面前縁から上面前縁へ向かって流れるため、 循環と来流が重なることで、後方よどみ点は最終的に翼の後縁へ移動し、クッタ条件を満たします。 「揚力を発生させる実際の翼では、気流は常に後縁で合流する。 そうでなければ、翼の後縁に気流速度が無限大になる点が生じてしまう。 この条件を満たして初めて、翼は換力を発生することができる。」
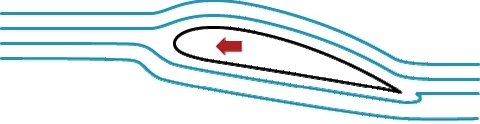
この翼上の循環があれば、なぜ上下で速度が異なるかを説明できます。 上の図にある翼上のこれらの渦こそが、航空機が空中を飛行できる理由です!
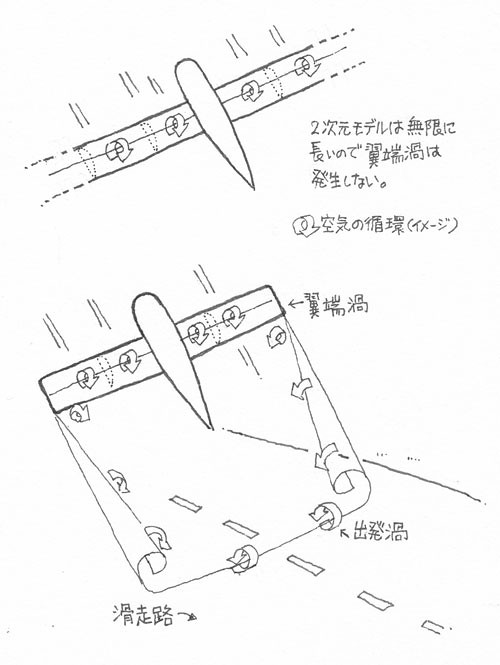
しかし、現実にはこの循環は肉眼では見えず、計測機器で記録するのも非常に困難です。 来流の速度に比べて、循環は非常に弱いためです。そこで、翼端渦を通じてその存在を証明することになります。 翼幅が有限であるため、翼上の循環は翼端から後方へ向かって流れ出します。左側は時計回り、右側は反時計回りに回転して翼端渦を形成します。 NASAによる翼端渦の実験動画はYouTubeで見つかります。
C-5が作り出す翼端渦の強さが非常に強いことがわかります。別のNASAによる翼端渦の解説です。
さらに興味深いのは、風洞内でのデモンストレーションです。迎角に応じて翼上の気流が変化する様子や、 先ほどの後方よどみ点、高迎角時の気流の乱れによる揚力の低下などを確認できます。
-
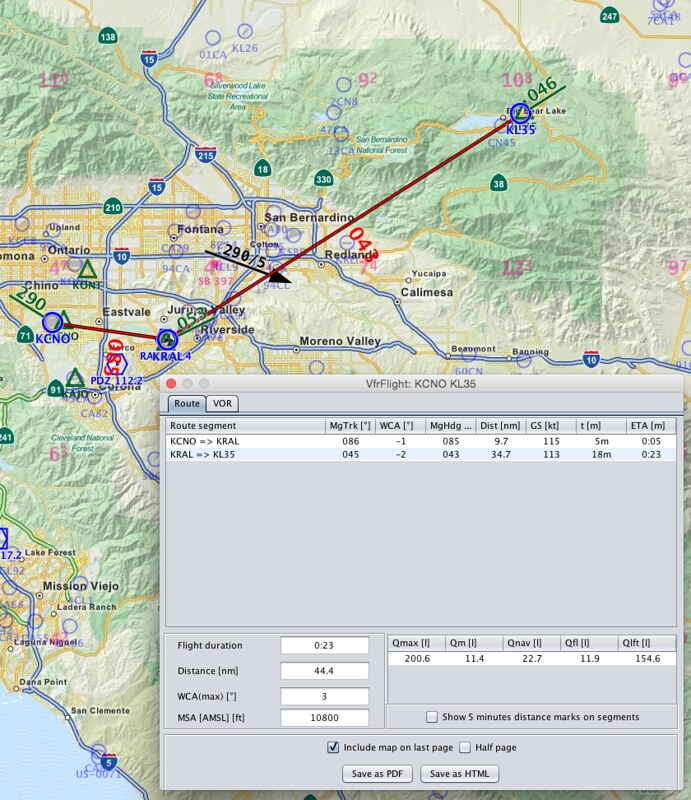
VfrFlight - 目視飛行ルート計画のための無料ツール
<a href=“http://vfrflight.org/en/index. target="_blank”>VfrFlightは、VFRフライトプランの作成に非常に推奨されるツールです。多機能でありながら無料で、さらにJavaで記述されているため、Windows / Mac OS / Linuxなど、あらゆるコンピュータで使用できます。その他の特徴には以下があります。
- シンプルで分かりやすいUI
- 世界地図との連動
- 空港/VOR駅/都市のデータベース
- 世界最小安全高度のデータベース
- リアルタイムのMETARおよびTAFデータ
- フライトプランのPDFおよびHTML出力(sample)
- 付近のVORの自動検索と表示
- 重量と重心の自動計算
- 偏流角の自動計算
- 距離、速度、高度、飛行時間の自動計算
- など
簡単にインストール方法を書きます。Macを例にすると、ここからダウンロードした21Mの圧縮ファイルを解凍し、VfrFlightディレクトリ以下のvfr-flight.jarをクリックするだけで実行できます。Windowsのマシンであれば、VfrFlight.exeを使用すればいいでしょう。
初めて使用する場合、初期化に2〜3分ほどかかり、その後世界地図とフライトプランのサンプルウィンドウが表示されます。 新しいプランを一から作成する場合は、FileメニューのNewをクリックします。

新しいフライトプランを作成するには、まずMain Tabで名前と簡単な説明を入力し、次に航空機の技術データを選択します。 これには、巡航速度、高度、磁偏差、燃料消費量、燃料タンク容量などが含まれます。 システムにはCessna 150/172およびCherokee 180の3つのサンプルが用意されており、プラス記号を押して必要な機体データを生成することもできます。
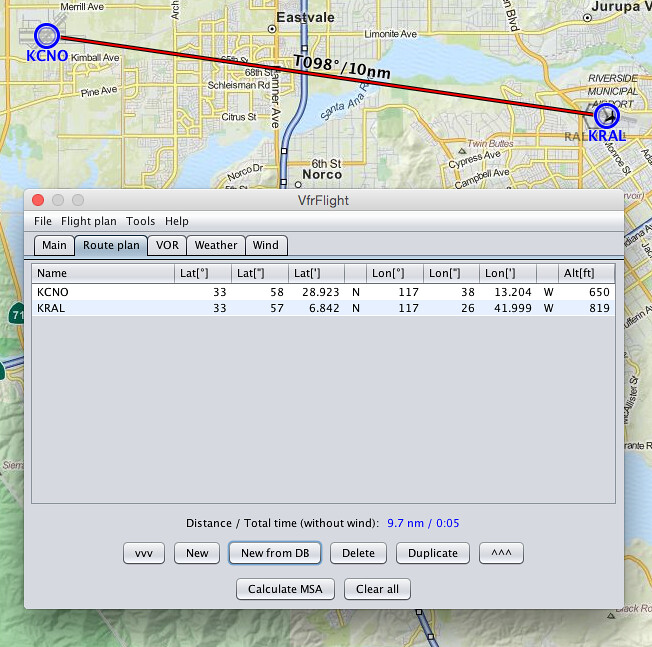
次にRoute Plan Tabで飞行ルートを入力します。今回はカリフォルニア州のChino空港からBig Bear Lake空港へ飛ぶつもりなので、 まずNew from DBをクリックしてChino空港を検索します。
 そしてAddボタンを押すと、Route Planに最初のウェイポイントが表示されます。
そしてAddボタンを押すと、Route Planに最初のウェイポイントが表示されます。
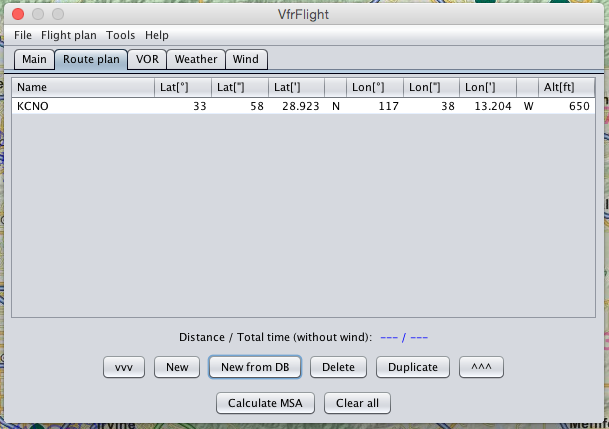 同時に後ろの地図もその空港の近くに切り替わって表示されます。
同時に後ろの地図もその空港の近くに切り替わって表示されます。2番目のウェイポイントをRiverside Municipal空港とすると、New from DBを続けて検索します。
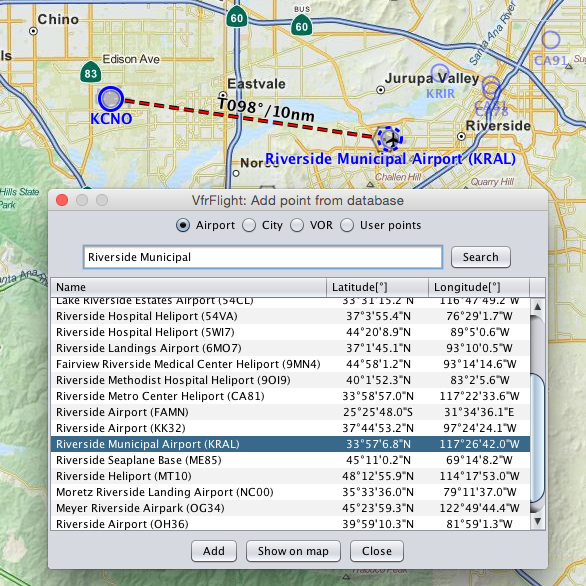 フライトプランに追加すると、このようになります。
フライトプランに追加すると、このようになります。
ついでに天気を確認しましょう。Weatherタブをクリックします。
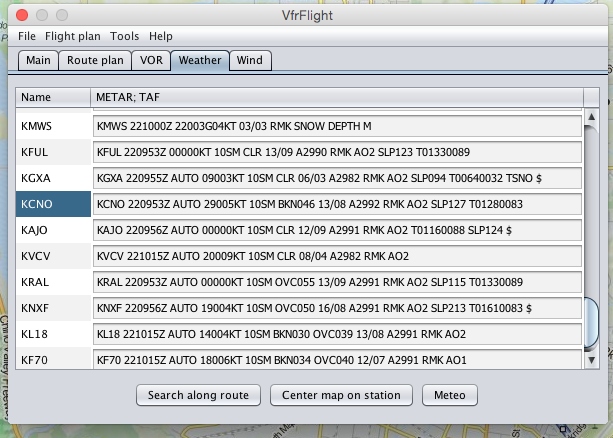 付近の空港のMETARが一目で分かります。
KCNOの風速・風向に基づいて、Windを設定します。
付近の空港のMETARが一目で分かります。
KCNOの風速・風向に基づいて、Windを設定します。
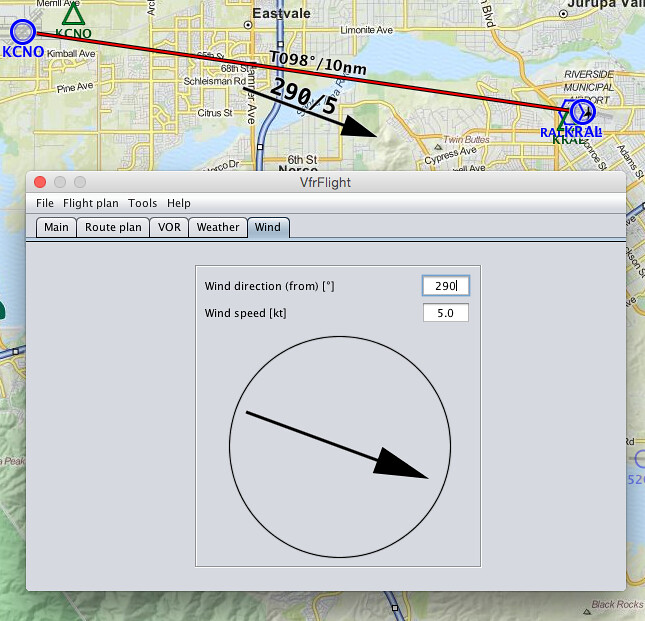 地図上のルート付近に風の情報が表示されているのが見えますね。とても便利です。
地図上のルート付近に風の情報が表示されているのが見えますね。とても便利です。周囲のVOR駅を見てみましょう。VORタブをクリックすると、システムが自動的に6つのVOR駅を見つけました。
 今回は目的地へ向かう際、PDZ Paradise VOR (112.2MHz) を使用するつもりです。ラジアル43度方向に進めば、目的地のBig Bear空港まで一直線に行けます。
今回は目的地へ向かう際、PDZ Paradise VOR (112.2MHz) を使用するつもりです。ラジアル43度方向に進めば、目的地のBig Bear空港まで一直線に行けます。目的地の空港も計画に入力すると、以下のような表示が得られます。各区間の航程と針路が表示されています。
 ここでCalculate MSAを押すと、10800フィートという結果が得られました。
ここでCalculate MSAを押すと、10800フィートという結果が得られました。Main Tabに戻り、Route nameの右側にあるAUTO-SETボタンを押すと、名称と概要情報が自動的に生成されているのがわかります。 次に磁偏差の計算ボタンを押すと、12度と得られます。
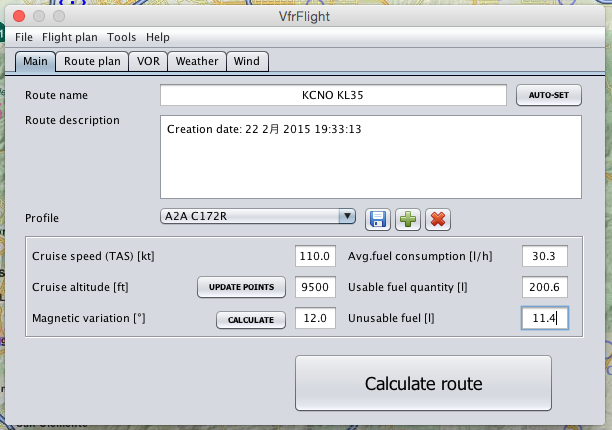 巡航高度を11500に変更し、下の大きなCalculate routeボタンを押すと、フライトプランが自動的に作成されます。
巡航高度を11500に変更し、下の大きなCalculate routeボタンを押すと、フライトプランが自動的に作成されます。
-
旋回の基本練習
--- 重点 --- 前回スリップとスキッドについての記事を書いて以来、基本的な技術の練習からずっと遠ざかっていました。 そこで、X-Plane 10でセスナ172を使って数時間、旋回の飛行に専念しました。自分の弱点に基づいて、訓練の重点を以下の点に置きました:
- 姿勢指示器に合わせてラダーの力を変化させ、針路の変化に応じて脚舵を調整し、スリップやスキッド状態に入らないようにコーディネートされたターンを維持する。
- 飛行高度の安定を維持する。特に高度を落とさないこと。
- ヨークとラダーの操作を手足同時に使い、かつ柔和に操作する。
- 外部の参照物を参考にし、計器と組み合わせて、視線が一点に集中しないように注意する。
- 飛行中は単に教程に従って機械的に操作するのではなく、旋回中の揚力の成分と重力の成分の存在、および推力、プロペラ後流、プロペラ効果、ジャイロ効果の歳差運動が飛行姿勢に与える影響を意識する。
- 体の姿勢を正しく保ち、無意識のうちに体や頭が傾かないように注意する。
- 時々深呼吸をして、両肩をリラックスさせ、手足の操舵力を緩める。
--- 旋回への進入 --- 水平飛行状態から左へ旋回する場合を例に挙げます。旋回バンクを形成するためにまずヨークを左に回しますが、 それと同時にバランスの取れた旋回を保ち、機体が滑らないように、左足でラダーを踏みます。
一般的にバンク角が20度以下のものをgentle turnと呼びます。この場合、機体の安定性設計の特徴により、 機体は反対方向、つまり自動的に右側へロールしようとする傾向があります。 したがって、操作時は絶えず左側への操舵力を調整する必要があり、この角度は練習や一般飛行には適しません。
バンク角が45度を超えるものをsteep turnと呼びます。この状態では、機体の左右の気流速度差、 つまり外側の速度が内側より大きいため、左右の両翼の揚力が異なり、右側が左側より大きくなります。 そのため、機体は旋回する側へ傾き続ける傾向があります。 したがって、操作時は絶えず右側への操舵力を調整する必要があり、これも一般の飛行や練習には適しません。
最適なバンク角は30度から35度の間、つまりnormal turnであるべきです。こうすれば条件が良ければ、 旋回中に手を放したとしても、機体は調和の取れた状態を保つことができます。
前述のジャイロ効果の歳差運動の説明によると、左へ旋回し始めると、機首は上方へ偏移する傾向があります。 もちろんこれはプロペラの出力にも関係し、スロットルの推力が大きければ、この上方への偏移効果は顕著になります。 練習では実際の状況に基づき、偏移量が大きい場合は、高度を維持するために適切に操舵桿を押すことができます。
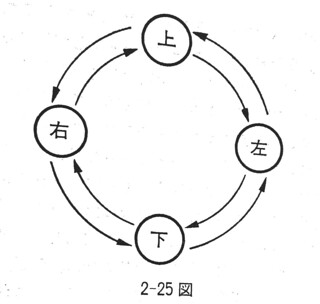
 歳差運動による偏移方向はどうやって覚えればよいでしょうか? 上の図を見るのは確かに良い記憶法です。
例えばコックピットから見たプロペラの回転方向は、一般的にアメリカの航空機は時計回りです。
したがって、矢印の方向――左上右下に従い、左に旋回する時、偏移の方向は上方になります。覚えやすいでしょう?
歳差運動による偏移方向はどうやって覚えればよいでしょうか? 上の図を見るのは確かに良い記憶法です。
例えばコックピットから見たプロペラの回転方向は、一般的にアメリカの航空機は時計回りです。
したがって、矢印の方向――左上右下に従い、左に旋回する時、偏移の方向は上方になります。覚えやすいでしょう?
旋回時の操縦(ヨークとラダー)は決して急激に行ってはいけません。徐々に舵位置に圧力を加えていく感覚を想像できます。 操舵量は最初はきっと心中で掴めませんが、何度も練習した後、 手足で使う力や杆を動かす距離をだいたい覚えることができるはずです。 こうして慣れてくれば、いつも計器や外部の参照物を凝視する必要はなく、 記憶、あるいは身体感覚に頼って、適切な角度まで旋回できるようになります。
--- 旋回中 --- 機体が旋回に入り、目標のバンク角30度に近づいたら、先行量を考慮して杆を戻す、つまりバンクを戻す必要があります。 左旋回でバンクが30度の時、自分は普通25度くらいから右へ杆を戻し始めます。 杆を戻す時にも歳差運動によるジャイロ効果が発生し、右に転じる時に機首は下方へ偏移します。 したがって、状況に応じて、適切に杆を引く操作も必要です。
旋回の過程で、翼が提供する揚力は垂直方向の分力しか持たないため、高度を落とさないために、 適切に後ろへ杆を引き、迎え角を増やします。
安定した旋回に入った後、内側や外側への滑り(slip/skid)がないか、高度、針路をチェックし、 外部の空中交通状況を観察します。 もちろん手では同時に杆を引き、足ではラダーを踏み、舵力を緩めずに維持します。 この一連の操作に慣れるにはやはり時間がかかります。
安定した旋回中にもう一つ意識すべきは、プロペラ効果の不均衡です。 左旋回を例に挙げると、左側のプロペラと右側の旋回半径が異なるため、 右側の速度は左側より大きくなります。つまり下図のVr>Vlです。 プロペラの断面を翼と想像すると、気流とプロペラの角度、つまり迎え角も異なり、 左側の迎え角は右側より大きく、αl>αrとなります。左側のプロペラが発生する牽引力(揚力)は右側より大きいことが分かり、 こうして左右両側の不均衡が生まれます。
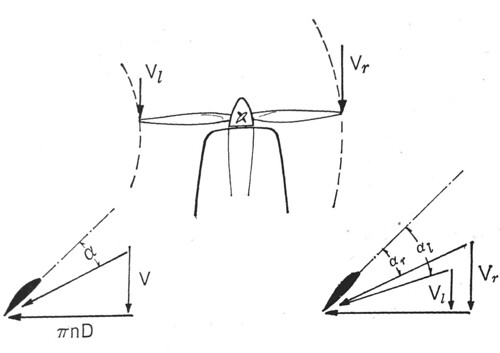
左旋回の場合、この不均衡のため、機首が下がる効果が生じます。 したがって、適切に後ろへ杆を引き、高度の維持に注意してください。 (右旋回の場合は正反対で、機首が上がる効果が生じ、 揚力成分の減少をちょうど相殺するため、操作は容易になります。)
 プロペラ効果の記憶方法はやはり図と結びつけて覚えると良く、上記の歳差運動の場合と似ていますが、
左右の位置が逆です。したがって、左へ旋回する時、機首は下方へ偏移します。本当に覚えやすいですね。
プロペラ効果の記憶方法はやはり図と結びつけて覚えると良く、上記の歳差運動の場合と似ていますが、
左右の位置が逆です。したがって、左へ旋回する時、機首は下方へ偏移します。本当に覚えやすいですね。
--- 水平飛行状態への復帰 --- 例えば目標の磁気針路が300度の場合、330度になったら右へ旋回する準備をする必要があります。 もちろん、ラダーも同時に操作し、左足を緩め、右足でラダーを踏み、バランスの取れた旋回を保ちます。 最初は右へ旋回する時のジャイロ歳差運動により機首が下方へ偏移するため、少し杆を引き、高度の維持に注意してください。
-
スリップとスキッドという2種類の横滑り
slipとskidの訳語について slip/skidはどちらも「側滑」と訳されることがありますが、具体的な違いは何でしょうか? まとめてみましょう。
モータースポーツを観戦すると、ドライバーがコーナーでスリップ(横滑り)を使っている場面をよく見かけます。 意図的に車体を横に滑らせ、素早く方向転換を行うためです。 (一般的に、スリップとはオーバーステアやドリフト状態を指します。例えば、ハンドルを30度切れば曲がるはずの車が、実際には40度も曲がってしまうような状態です。)
航空力学の観点から見てみましょう。例えば、機体を右に旋回させるために操縦輪を時計回りに回します。 すると左側のエルロンが下がり、右側のエルロンが上がります。これにより左翼の揚力が右翼より大きくなり、機体は縦軸を中心に時計回りにロール(roll)して、針路は右に変わります。 しかし、このとき下がった左側のエルロンが生み出す抗力によって、機体には「アドバース・ヨー(adverse yaw)」と呼ばれる逆方向の偏航が発生します。 その結果、機首が意図した方向とは逆の左方向へ向き、旋回レートが低下し、効率も悪くなります。
この現象が「slip」です。現象としては一種の側滑です。機体が正面の気流に正対していないため、いわば斜めに飛んでいる、あるいは横を向いて飛んでいる状態で、カニが横歩きしているような姿です。
アドバース・ヨーを修正するには、右側のラダーペダルを踏み、機首を垂直軸を中心に右方向へヨーさせる必要があります。 しかし、この修正量が大きすぎると、機体の側滑量が必要以上に大きくなってしまいます。 この現象が「skid」です。先ほどのレーサーが意図的に行ったスリップの例を思い浮かべると、覚えやすいでしょう。 skidはslipよりも危険です。失速速度に近い状態でskidになると、低い方の翼が高い方の翼よりも先に失速し、スピラル(スピン)に発展するリスクが高まるからです。 一方、slipでは高い方の翼が先に失速するため、バンク角は小さくなり、失速の可能性も低くなります。
slipとskidの問題点は、抗力がエネルギーを消費し、揚力を低下させてしまうことです。 初心者パイロットは、旋回中にラダー操作をうまく行えず、slipに陥りがちです。 また、強風の中で上昇する際にもslipが発生しやすく、上昇性能が低下するため、障害物を回避しなければならない場面では特に危険です。 slipもskidも起こさない完璧な状態が「Coordinated flight(協調された飛行)」であり、この状態でこそ揚抗比(L/D ratio)が最大化します。
 上の図で、左側の飛行機はslipの状態にあります。これはバンク角が大きすぎるか、あるいはヨーが不足しているために起こります。
機体の軌跡が内側に偏るため、ターンコーディネーターのボールが左に寄っています。
一方、右側の飛行機はskidの状態にあります。これはバンク角が小さすぎるか、あるいはヨーが大きすぎるために起こります。
機体の軌跡が外側に偏るため、ターンコーディネーターのボールが右に寄っています。
上の図で、左側の飛行機はslipの状態にあります。これはバンク角が大きすぎるか、あるいはヨーが不足しているために起こります。
機体の軌跡が内側に偏るため、ターンコーディネーターのボールが左に寄っています。
一方、右側の飛行機はskidの状態にあります。これはバンク角が小さすぎるか、あるいはヨーが大きすぎるために起こります。
機体の軌跡が外側に偏るため、ターンコーディネーターのボールが右に寄っています。
slipが役立つ良い例として、風に流されないように機体と針路の間に偏流角をつける横風飛行があります。 また、ショートフィールド・ランディング(短距離離着陸場への着陸)では、slipを利用して抗力を増し、障害物を回避しつつ短い滑走路に降りる目的で使われます。 着陸進入時に出力を絞った状態で、反対方向のラダーとエルロンを操作する、いわゆる「クロス操縦」を行うことで、理想的なslipの効果が得られます。
クロス操縦を利用してslipに入る手法は、フォワード・スリップ(forward-slip)とサイド・スリップ(sideslip)の2つに分けられます。 両者の状態は似ていますが、slipを入れる目的が異なり、対地航跡と針路も異なります。
フォワード・スリップは、通常アプローチ中に高度を素早く下げるために使われます。(スポイラーがない小型機では特に有効です) 元の飛行経路を維持したまま、速度を増やさずに高度を下げることができます。 針路が横に向くため、正面から見ると、機体の進行方向と機首の方向に角度が生じます。 滑走路に近づくにつれて、タッチダウンの前にはフォワード・スリップの針路を滑走路の方向に合わせ、機輪を真っ直ぐにする必要があります。 (この時、横風がある場合には、以下で説明するサイド・スリップの操作も必要になります。)
サイド・スリップは、機体を傾けた状態で行い、主に横風の状況でのフレアや着陸操作に使われます。 フォワード・スリップとの違いは、針路がサイド・スリップに入る前と同じに保たれる点です。 つまり、縦軸は元の針路と平行に保ちますが、対地航跡は変化します。 左右の翼が高さ違いになるため、機体は低い翼の方向へ横に滑るような成分を持ちます。 サイド・スリップの操作を開始する際、パイロットはまず風上側にロールし、ラダーを使って針路を滑走路のセンター線に保ちます。 これにより、風上側の車輪が先に接地することになります。
“Coordinated flight"状態にあるボールの表示 Turn and Slip indicator
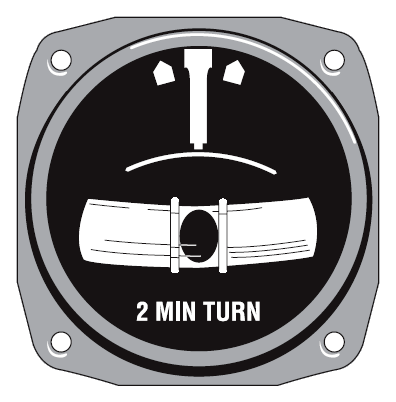
Turn coordinator

-
1メートルのタッチアンドゴーのメモ
先輩とWeiboで「低空通場(低高度パス)」のことについて話しましたので、メモとして書き残しておきます。
概要: 教員が軽飛行機を操縦し、1メートルの高度で通場を行う (低空通場とは、飛行中の航空機が空港の滑走路上空または観礼台の前方上空を飛行することである。百度百科より引用)
目的: 学員に低高度飛行の概念と感覚を確立させること、すなわち着陸時の飛行感覚を養うことにある
難易度: 高度の維持は外部参照物の観察に依存するため、教員の卓越した操縦技術が求められると同時に、学員への解説も行う必要がある 速度やスロットルは完全に感覚(五感と四肢)に頼る 速度が速すぎると教育的意義が失われ、遅すぎると墜落しやすく、学員に笑われる
難易度が更高的な飛行: 小型機で夜間飛行の訓練をする際、教員がすべての灯火を消して行う有視界飛行では、高度は推測、速度は感覚、スロットルは音に頼り、着陸時には灯火がない 速度の判断について、異なる外形(コンフィグレーション)ではスロットルの開度と速度に関連性があるため、まずはスロットルに基づき、次には経験によって判断することになる
完
-
素晴らしい気象サイトwindyty.com
台風!台風が来た! 台風の動向や台風の経路を調べるには、どのウェブサイトがいいの?
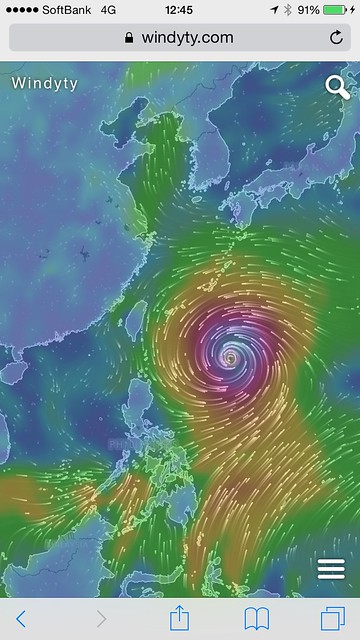
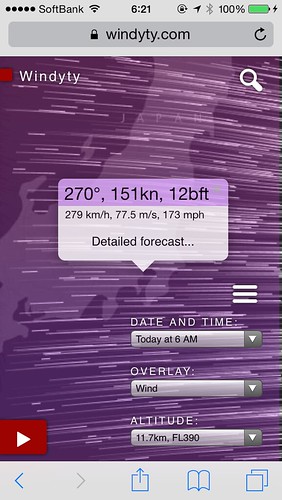
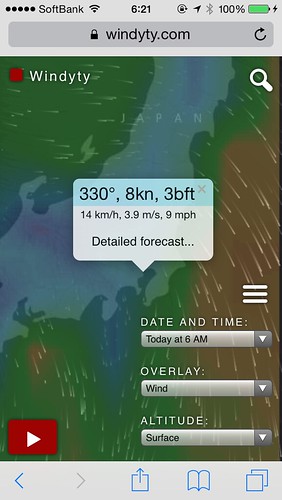
windyty.com天気予報サイトは、Google マップ風のUIを採用しており、世界中の現在の風向風速、気温、気圧、雲と湿度の情報、および1週間の天気予報を表示することができます。 このサイトのUIは本当に素晴らしく、地図上のどこかをクリックするだけで、その地点の気象情報がポップアップで表示されます。
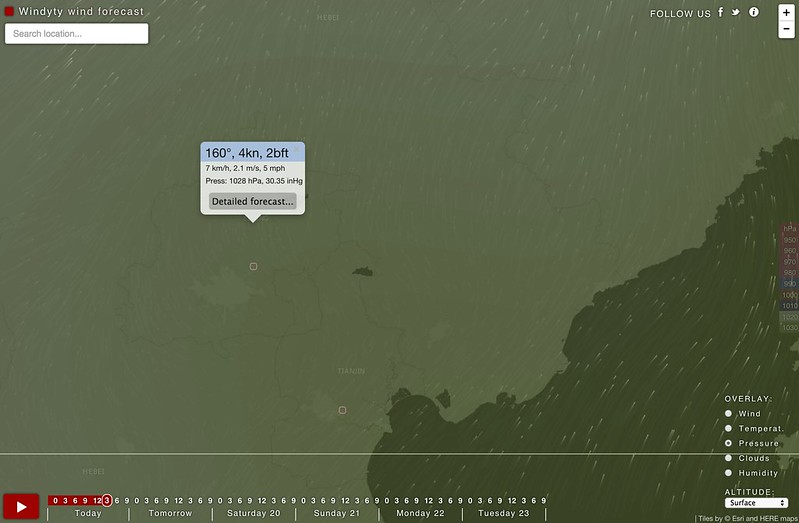
また、ページの右下には高度選択があり、高度層には以下のデータがあります: 地表 300メートル 600メートル 750メートル 900メートル 1500メートル 2400メートル 3000メートル 6000メートル 9000メートル 11700メートル 13500メートル これらのデータがあれば、フライトプランを作成するには十分です!
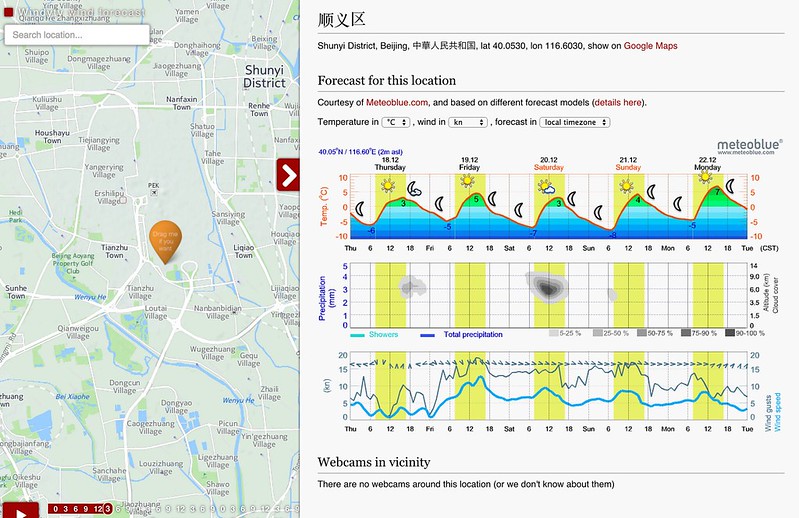
このサイトは空港のMETARも表示できます。下図のように、とてもプロフェッショナルでしょう。

また、このサイトのモバイル版もとても精巧に作られており、PC版と同じように強力な機能があります。例えば: 明日の300メートル高度の雲予報

1500メートル高度の風向風速

11700メートル高度の風向風速
地表の風向風速
こうした気象動向の情報があれば、フライトプランもより確実に立てられますよね?
完
-
火山噴火時のMETAR航空气象通報 VA
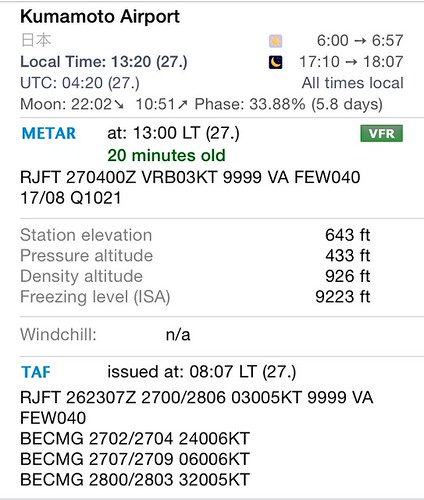
METAR内の視程障害(OBSCURATION)の項目には、火山灰の定義があります。 “VA 火山灰 Volcanic Ash” 現在、日本の熊本にある阿蘇山が噴火しており、日本国内のフライトはすべて欠航となっています。
500RT:【阿蘇山噴火】上空1000メートルまで噴煙 熊本 気象台は、火山灰による農作物の被害に注意するよう呼びかけている。
— 前田洋輔 (@yokohama_77) November 26, 2014ご覧の通り、やはり示されていました。
 かなり珍しいケースなので、メモとして残しておきます。
かなり珍しいケースなので、メモとして残しておきます。<a href=http://www.aviationweather.gov/adds/tafs/?station_ids=RJFT&std_trans=translated&submit_both=Get+TAFs+and+METARs>RJFT METAR
-
気象視程および実視程への変換 (CMV)
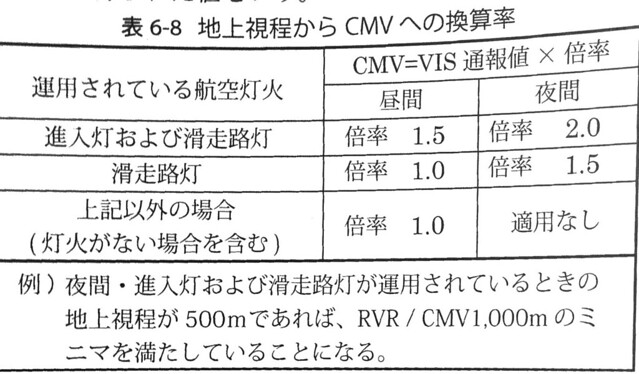
日本の航図を見ていると、着陸最低気象条件にCMV (Converted Meteorological Visibility) が使用されているのをよく見かけます。 この指標は、空港にRVR設備がない場合や、設備が故障している場合に使用されます。 CMVはMETARまたはATISを使用して計算する必要があり、換算時は昼間と夜間に分けられ、同時に照明設備の状況も考慮されます。気象視程 (VIS) に係数を乗じてCMV値を算出します。
この係数は、手元の日本航空情報手引書 AIM-J で確認できます。
 すなわち、
高光度進入灯および滑走路灯がある場合: 昼間 CMV = VIS * 1.5 夜間 CMV = VIS * 2.0
滑走路灯がある場合: 昼間 CMV = VIS * 1.0 夜間 CMV = VIS * 1.5
その他の照明設備(照明設備なしを含む): 昼間 CMV = VIS * 1.0 夜間 換算不可
すなわち、
高光度進入灯および滑走路灯がある場合: 昼間 CMV = VIS * 1.5 夜間 CMV = VIS * 2.0
滑走路灯がある場合: 昼間 CMV = VIS * 1.0 夜間 CMV = VIS * 1.5
その他の照明設備(照明設備なしを含む): 昼間 CMV = VIS * 1.0 夜間 換算不可例えば、夜間に進入灯と滑走路灯がある場合、係数は2となり、視程が500メートルであれば、RVR/CMVは1000メートルとなります。
RVR報告が利用可能な場合、RVRを視程に換算してはならないことに注意してください。また、CMVは、離陸、カテゴリーIIおよびIIIの精密進近、および目視旋回には使用できません。 さらに、CMVは着陸最低気象条件を判断するためのものであり、フライトプランやリリースなどのディスパッチ業務には使用すべきではありません。
また、インターネット上で2012年の日本航空の組合と会社側の交渉に関する資料を見つけましたが、 どうやらパイロットはCMVの定義に不満を持っているようで、理論的根拠が乏しいと感じており、CMVを使用することで決断高度が低下し、今後Go aroundやMissed approachが増加することを懸念しているようです。 ただ、その後の展開は見つからず、CMVの安全性に関する議論の結果がどうなったかは不明です。
-
PBN (Performance Based Navigation)
PBN (Performance Based Navigation)
1 PBNの基本概念
Performance Based Navigation (PBN)は、国際民間航空機関 (ICAO) が各国のArea Navigation (RNAV) およびRequired Navigation Performance (RNP) に関する運用実践と技術標準を統合するにあたり、提案した新たな運用概念です。これは、航空機の高度な機上設備と衛星航法およびその他の先進技術を組み合わせたもので、航路、ターミナルエリア、進入着陸に至るすべての飛行段階を網羅しており、より正確で安全な飛行方法と、より効率的な空中交通管理様式を提供します。ICAOは2007年9月の第36回大会で、すべての締約国に対し、2016年までにグローバルに整合性の取れた調和のとれた方法で、従来の地上ベースの航法飛行様式からPBNへ完全に移行することを正式に求めました。
従来の航法は、地上航法施設からの信号を受信し、ステーションへの飛行およびステーションからの飛行によって航空器の誘導を行うものであり、その航路および飛行手順は、地上航法施設の配置と設備の種類に制約され、精度には限界がありました。現在の運用概念や技術的手段では、これらの問題を解決することはできません。機上設備の能力向上、および衛星航法やその他の先進技術の継続的な発展に伴い、ICAOは「Performance Based Navigation (PBN)」という概念を提案しました。PBNの導入は、航法がセンサーベース航法から性能ベース航法への移行を体現するものです。
PBNは従来の手順と比較して、以下のような利点があります。 • 航空器を正確に誘導し、飛行運用の安全性を向上させる。 • 垂直誘導を提供し、連続的で安定した降下手順を実施することで、制御された地表への衝突 (CFIT) のリスクを低減する。 • 全天候運用を改善し、地形が複雑な空港での運用の安全性を確保する。 • 柔軟かつ最適化された飛行経路を実現し、航空機のペイロードを増加させ、飛行時間を短縮し、燃料を節約する。
PBNの原型は、RNAV (Area Navigation) およびRNP (Required Navigation Performance) の概念に由来します。この概念は、1990年代初期にICAOがFuture Air Navigation System (FANS) を研究開発する際に提案されたもので、当初は洋上飛行の空域管理および空中交通間隔の割り当てに適用されていました。機上航法技術の継続的なイノベーションに伴い、PBNの定義と内涵も変化し続けています。ICAOは既存の研究成果を統合した上で、2008年に正式にPerformance Based Navigationの概念を提案し、RNAVとRNPがPBNの2つの異なる形式であることを明確にし、その適用範囲も飛行の全段階に拡大されました。
2 ナビゲーション仕様
PBNナビゲーション仕様とは、指定された空域内でのPBN運用を支援するために必要な、航空器および乗務員に関する一連の要件です。 既存のナビゲーション仕様には以下の2種類があります:
- RNP仕様: Area Navigationに基づくナビゲーション仕様で、性能監視と警報を要求します。RNP 4、RNP APCHのように、接頭辞RNPで表記されます。
- RNAV仕様: Area Navigationに基づくナビゲーション仕様で、性能監視と警報を要求しません。RNAV 5、RNAV 1のように、接頭辞RNAVで表記されます。
3 Area Navigation (RNAV)
Area Navigation (RNAV) は、かなり以前から存在する航法方式の一種です。航空器が地上設備または衛星設備の航法カバー範囲内、あるいは機上の自律航法設備の動作範囲内、またはこれら両方の状況において、任意の希望する飛行経路に沿って飛行することを可能にします。 注:Area Navigationには、Performance Based Navigationのほか、Performance Based Navigationの規定を満たさないArea Navigation運用も含まれます。
-
副翼反効(エルロンリバーサル)
以下は百度からの抜粋です:
翼の弾性変形により、エルロンが発生するモーメントが翼に作用すると、翼はエルロンの偏向とは逆の方向にねじれ変形し、迎え角が変化します。その結果、空気力の作用下で、エルロンが発生するロールモーメントとは逆方向のモーメントが発生します。対気速度がある値に達すると、エルロン操作によって生じるロールモーメントと、翼の空気力による弾性変形で生じるモーメントが互いに相殺され、エルロンが無効(エルロン効果がゼロ)になり、機体の操縦が不可能になります。この時の対気速度を「逆効作速度(反効速度)」と呼びます。対気速度がさらに上昇し、逆効作速度を超えると、エルロン操作で生じるロールモーメントよりも、空気力による翼変形で生じる逆方向のモーメントの方が大きくなります。この時、エルロン効果はマイナスとなり、逆の作用を及ぼします。----この状況は「エルロンの逆効作(Aileron Reversal)」と呼ばれます。 エルロンの逆効作問題を解決する方法の一つは、翼のねじり剛性を高めることです。もう一つの方法は、エルロンを翼の付け根に近い、剛性の高い場所に移動することです。しかし低速飛行時は、空力効率が低いため、アームの長い外側のエルロンに頼らざるを得ません。そのため、一部の航空機では内側エルロン(inner aileron)と外側エルロン(outer aileron)を併設しています。ただし、内側エルロンはフラップを分断する構造になり、離着陸性能に悪影響を及ぼすため、内側エルロンを持つ航空機は多くありません。現代の輸送機は、翼のねじり剛性を高めることに加え、高速飛行時にスピラー(スポイラー)を用いてエルロンによるロール操縦を補助し、外側エルロンの負荷を分散することが一般的です。
以下に、一般的な旅客機のエルロン構成をまとめてみます。
- A310/A300-600シリーズ:内側エルロンのみ
- A320/A330/A340/B737/B757:外側エルロンのみ
- 初期のA300/B747/B767/B777/B787/A350:内側エルロンと外側エルロンを装備。高速飛行時は外側エルロンが固定(ロック)され、低速時のみ使用される。
- A380:3つのセクション(内側、中央、外側)で構成されるエルロンを採用。
http://baike.baidu.com/view/1785460.htm http://detail.chiebukuro.yahoo.co.jp/qa/question_detail/q1497471919 http://zhidao.baidu.com/link?url=FkCnbElZcOBTesgepHsD9f0XxD-u8pyhxc7sTLhn1aG5MjB2b5FB17jo-WkD5QA7YclLpmgE086Ak7sArInNwa
-
FIS-BとTIS-B
ADS-B地上局は航空機に情報を送信することができ、具体的には「航空交通情報サービスブロードキャスト(TIS-B:Traffic Information Service-Broadcast)」と「フライト情報サービスブロードキャスト(FIS-B:Flight Information Services-Broadcast)」の2種類に分類されます。
TIS-B:ADS-B地上局は航空機から送信されるADS-B位置情報を受信し、これらのデータを監視データ処理システム(SDPS:Surveillance Data Processing System)へ転送します。同時にSDPSはレーダーやその他の監視機器からのデータも受信し、SDPSはこれらのデータを融合して統一されたターゲット位置情報を生成し、TIS-Bサーバーへ送信します。TIS-Bサーバーは情報を統合・フィルタリングした後、航空交通監視の全景情報を生成し、ADS-B地上局を通じて航空機に送信します。これにより、乗員は包括的かつ明確な航空交通情報を把握することができます。TIS-Bの応用により、ADS-Bの異なるデータリンクタイプのユーザーは周辺の空域運行情報を取得し、間接的に相互に可視化されることが可能になります。
FIS-B:ADS-B地上局は航空機に対し、気象や航行情報などを送信します。これらの情報はテキストデータの場合もあれば、画像データの場合もあります。テキスト形式の気象情報には、定時気象通報式(METAR)、特別気象通報式(SPECI)、空港予報気象通報式(TAF)などが含まれます。画像形式の情報には、レーダーハイブリッド画像、一時的な飛行禁止区域、その他の航行情報が含まれます。FIS-Bにより、乗員はより多くの運航関連情報を取得し、航路の気象状況や空域の制限条件を timely に把握できるため、より柔軟かつ安全な飛行が保証されます。



データ通信網において、あるリンクプロトコルの技術要件に基づいて2つ以上のデータステーションを接続する通信施設を、データリンクと呼び、略してデータリンクとも言います。データリンク(data link)には物理的な回線だけでなく、これらのデータ伝送を制御するための通信プロトコルが必須です。ADS-BのOUT機能とIN機能は、いずれもデータリンク通信技術に基づいています。ADS-Bで使用可能なデータリンクは合計3種類あります:トランスポンダに基づくSモードの1090ESデータリンク、ユニバーサルアクセストランシーバ(UAT:Universal Access Transceiver)、モード4VHFデータリンク(VDL-4)です。

FAAの規定: – 1090 ESデータリンクは、国際輸送フライトおよび国内18,000フィート(含む)以上の高高度飛行に使用されます。 – UATデータリンクは、18,000フィート未満を飛行する航空車のみに使用されます。 – 異なるデータリンク機器を搭載した航空車同士は通信しません(ただし、航空車が2種類のデータリンク機器を同時に搭載している場合を除く)。
明らかに、1090 ESデータリンク通信は主に高高度航路運航に使用され、その目的は航空交通管制の監視能力を改善することです。一方、UATデータリンク通信は低高度運航のゼネラル・アビエーション(GA)活動のみに使用され、その目的はGA航空車の空中衝突防止能力と飛行情報取得能力を向上させることです。
参考資料: 广播式自动相关监视(ADS-B)在飞行运行中的应用 ADS-B的主要技术以及相关设备综述 ADS-B在美国 <a href=http://www5.cafuc.edu.cn/Article_Show.asp?ArticleID=933>ADS-B在澳洲
8月25日更新 Weiboでこの良い記事を見つけましたので紹介します。<a href=“http://www.minhangjiwuluntan.com/_d276294309. target="_self”>解读ADS-B自动相关监视系统
-
バフェット・マージン
バッフェット境界は、揚抗比に次ぐ、航空機の空力設計において2番目に重要な空力性能パラメータです。
翼のバッフェットとは、翼構造が、気流の剥離によって引き起こされる圧力脈動に対して示すランダムな励振応答のことです。航空機が低速かつ高迎え角で飛行する際、揚力面上の気流の剥離がある程度進むとバッフェットが発生し、これを揚力型バッフェットと呼びます。
バッフェット開始迎え角に対応する揚力係数の、マッハ数に対する変化曲線を、バッフェット境界と呼びます。バッフェット境界が高ければ、航空機の最小水平飛行速度は低くなり、飛行時の運動性と安全性が向上します。
バッフェット境界パラメータ(M2CL)は、マッハ数(M)の二乗と最大使用揚力係数の積です。バッフェット境界値を超えると、通常、翼で剥離した気流の後流(乱流)が尾翼に作用し、許容できない機体の振動(バッフェット)を引き起こします。
バッフェット境界は通常、翼上に「一定の面積」の気流剥離が生じることに対応しています。旅客機の最大巡航揚力係数は、バッフェットが発生し始める境界において1.3Gの過荷重(パイロットが約40度のバンクで運動操作を行う場合、あるいは強烈な突風に遭遇した場合)に制限されるため、抗力と同様に、航空機の性能を決定する重要な基本データとなります。
バッフェット境界のピークは、与えられた翼面荷重において航空機が飛行可能な最大高度を決定します。バッフェット境界が低い場合、巡航揚力係数とバッフェット境界との間に0.3Gの過荷重余裕を確保するために、希望する巡航揚力係数を低減する必要があり、その結果、巡航高度が低下することになります。ジェットエンジンの燃料消費率は飛行高度の低下に伴って増加するため、燃料効率も低下します。さらに、航空交通管制システムから割り当てられた巡航高度の範囲を十分に活用できなくなり、巡航性能が損なわれる可能性があります。
現代の旅客機は、対気速度計の速度が失速速度の107%に低下したとき、警報として機体がバッフェットを起こすように設計されています。失速速度は機体の重量や高度によって増大します。つまり、同じ速度であれば、より重い航空機や、より高く飛ぶ航空機ほど、失速速度は大きくなります。
失速速度の基準は、航空機が水平飛行の状態にある場合の速度を指しますが、航空機が旋回などで傾斜した場合、G(荷重)の増加に伴い失速速度も増大します。
そのため、バッフェット発生速度付近の速度で飛行中に、気流の影響で機体が傾斜した場合、失速に陥る可能性が非常に高くなります。
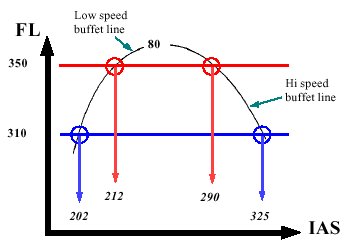
Gは 1/COSθ で計算できます(θはバンク角)。例えば、60度であれば2G、40度であれば1.3Gとなります。
1.3Gのバッフェット境界とは、40度のバンクで飛行した際にバッフェットが生じる速度を指します。したがって、1.3Gのバッフェット境界の速度で飛行していれば、仮に40度の傾斜が生じてもバッフェットは発生しません。
一般的に旅客機は1.3Gのバッフェット境界以上の速度で飛行し、またバンク角は30度を超えないため、安全上の余裕は保証されています。しかし、乱気流に遭遇した場合の規定は異なり、軽度の揺れ(Light)では1.3Gのバッフェット境界が求められますが、中程度(Moderate)以上では1.5Gのバッフェット境界が求められます。
全日空(ANA)のボーイング747-400(744)パイロットのブログから引用した事例を見てみましょう。
ある日、FL370で飛行中、前方を飛行する他の旅客機からFL410で中程度の乱気流に遭遇したとの報告があり、付近の他機がFL430への上昇を申請し始めました。しかし、FMS-CDUを確認したところ、最大上昇可能高度はFL433しかないことがわかりました。FL430まで上昇した場合、1.3Gのバッフェット境界は238ノットから254ノットの間となります。もしこの速度付近で1.3Gを受ければ、バッフェットが発生する可能性が非常に高いです。そのため、彼がとった対策は高度を上げることではなく、南へ迂回してその乱気流空域を回避することでした。
http://www.dsti.net/Information/ViewPoint/41437 http://www2.plala.or.jp/sin/plalaboard/message/13391.html http://detail.chiebukuro.yahoo.co.jp/qa/question_detail/q1355634013 http://fdc.blog.so-net.ne.jp/2008-06-27
-
FPA PA AOA
FPA(飛行経路角)とPA(ピッチ角)の違い
用語の定義
- FPA: flight path angle(飛行経路角)
- PA: pitch angle(ピッチ角)
ピッチ角
ピッチ角は、機首を通る線(機体軸)と地平線とのなす角度です。慣例的にこれをTHETAと呼びます。これは姿勢指示器に表示される角度です。
飛行経路角
飛行経路角は、航空機の速度ベクトルと地平線とのなす角度です。慣例的にこれをGAMMAと呼びます。
上昇中の関係
上昇時、ピッチ姿勢角は上昇角と迎え角の和に等しくなります。
出典:http://www.atpforum.eu/showthread.php?t=12207
-
民間操縦士実地試験基準 PPL
中国民用航空局 飛行標準司が発行した「私用運転免許 実用試験基準 DOC NO. FS-PTS-001R1」は、飛行を学びたい方に参考としておすすめします。 リンクはこちらです。
-
METARのフォーマット規格
簡単なメモを書く。
World Meteorological Organization (WMO) の <a href=“http://www.wmo.int/pages/prog/www/WMOCodes/WMO306_vI1/VolumeI.1.>ウェブサイト で偶然 METAR のフォーマット仕様を見つけた。 原文は<a href=“http://www.wmo.int/pages/prog/www/WMOCodes/WMO306_vI1/Publications/2013update/Sel2.pdf"こちら。FM 15 METAR の部分が該当する。 かなり退屈だ。おそらく最初から最後まで読むことはないだろう。マニュアルとして使い、今後見慣れないコードが出てきたら確認すればいい。
-
Blitzortung.org リアルタイム雷暴・雷雨地図ウェブサイト
航空機にとって、雷や雷雨は常に最も危険な自然現象です。 安全のため、できるだけ遠くへ避けるのが唯一の方法です。 しかし、世界中のどこで雷が発生しているかという情報は、なかなか見つからないものです。 幸いなことに、今では Blitzortung.org があり、 世界地図上で現在どこで雷や雷雨が発生しているかを確認できます。 本当に便利なウェブサイトです。
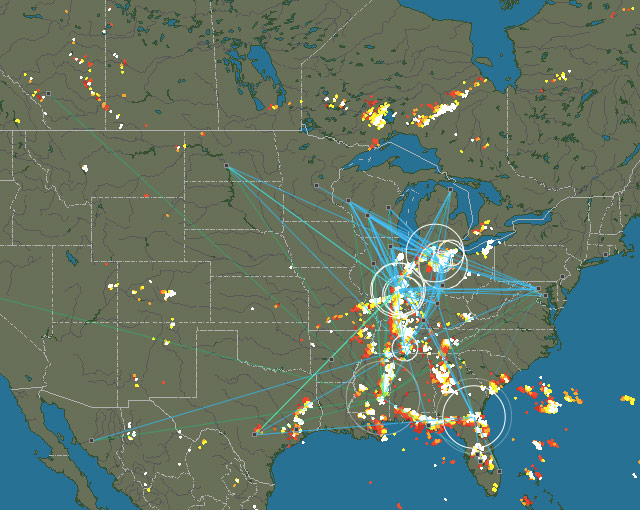
ウェブサイトの具体的な使い方はあまり説明しませんが、とにかく非常に簡単です。 ヨーロッパ、オセアニア、またはアメリカなど、地域を選択するだけで、 その地域の雷や落雷の発生地点を確認できます。
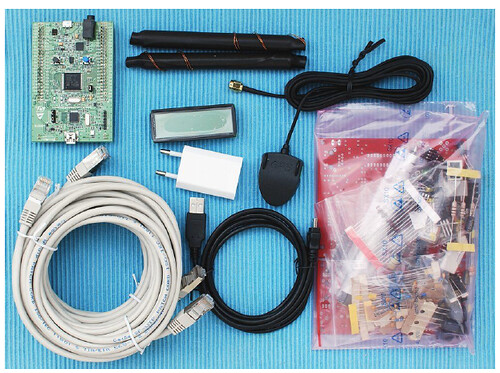
使い方よりも、このウェブサイトのシステムの方が興味深いです。 これは完全にボランティアによって構成されており、まるで有名な flightradar24 のようです。 ボランティアはまず、Blitzortung.org から一連の電子部品を購入する必要があります。 これには、回路基板、アンテナ、アンプ、GPS などが含まれ、価格は約 200 ユーロです。 次に、これらの部品を自分で組み立て、専用のソフトウェアを実行し、 アンテナが受信した信号を Blitzortung.org のサーバーに送信します。 この作業は一般の人ができるものではなく、電子工学の知識がなければ本当に不可能です。

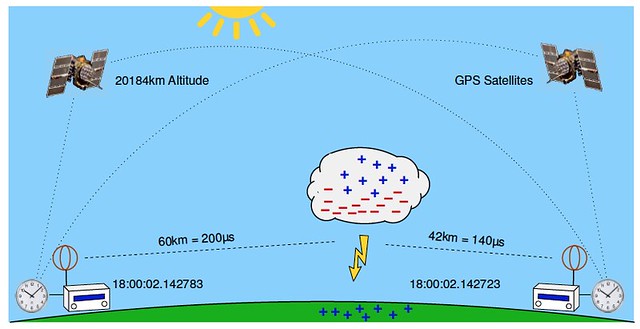
各ボランティアの機器が 1 つの観測ステーションとなり、インターネットを通じて 観測ステーションのデータを接続することで、雷の発生を計算し、 世界中に広がる観測ネットワークを構成しています。
ただし、現在のところヨーロッパ、オセアニア、アメリカのデータしかないようです。 残念ながら、アジアの地図上ではまだ何も表示されていません。 広大なアジアで、まだボランティアが現れていないのでしょうか?