練習ノート
-
OverlayEditorを使用してマーキングを行う サーキット着陸の練習
OverlayEditorは無料のX-Planeアドオンツールで、シーナリーアドオンの作成に使用できます。 このツールを使って地図上に様々な建物を配置し、建設作業員のように自分専用の空港などのシーナリーを建設することができます。
ここでは、美しいアドオンを作成する方法ではなく、五辺飛行(トラフィックパターン)の練習という観点から、 OverlayEditorを利用して飛行技術を向上させる方法を紹介します。
まず、OverlayEditorの使用経験がない方向けに、インストールと使用方法を簡単に説明します。 私の例ではMac OSでのインストールを行いますが、Windowsでも方法は大同小異でしょう。
ソフトウェアのダウンロードは<a href=“http://forums.x-plane.org/index.php?app=downloads&showfile=726"x-plane.orgで見つかります。ダウンロード後、実行ファイルOverlayEditor.appを直接入手できます。 しかし、OverlayEditorはwxPythonライブラリを使用する必要があるため、 <a href=“http://www.wxpython.org/download.php#osx"www.wxpython.orgのこちらからもダウンロードする必要があります。 Macの場合、私はwxPython3.0-osx-cocoa-py2.7を使用しました。 ダウンロードするとwxPython3.0-osx-3.0.0.0-cocoa-py2.7.dmg圧縮ファイルが手に入ります。 解凍するとwxPython3.0-osx-cocoa-py2.7.pkgインストーラーが得られますので、ダブルクリックしてインストールを開始します。 MacOS 10.8以降の新しいOSの場合、システム設定System Preferences → Security & Privacyで、ダウンロードしたアプリの実行が許可されていない場合、設定を変更しないと正常にインストールできないので注意してください。
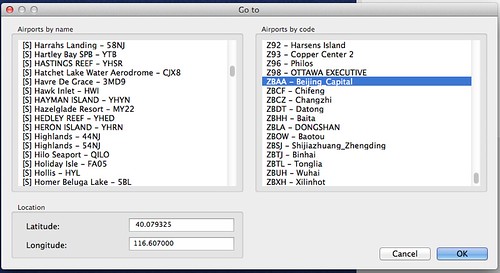
さて、OverlayEditorが使える状態になりました。 まず空港を指定します。ここではZBAA、北京首都国際空港を選択します。
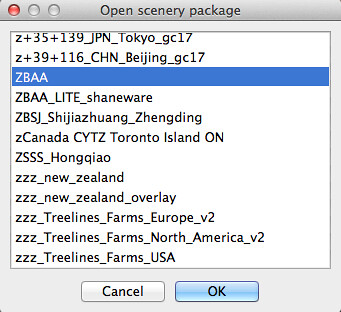
 次に変更するシーナリーパックを選択します。新しいシーナリーを作成することも可能ですが、ここでは簡単のため、既存のものを開きます。
次に変更するシーナリーパックを選択します。新しいシーナリーを作成することも可能ですが、ここでは簡単のため、既存のものを開きます。
次は、地図上に3Dオブジェクトを配置します。目的はトラフィックパターンの練習なので、 X-Plane自体のシーナリーは主に平面であり、衛星写真を使用したシーナリーアドオンでも立体感はまだ弱いため、 空港の外周にある5辺の各旋回位置に、目立つ目印となる建物を配置することを考えます。 ここでは、高さ100メートルのテレビアンテナ塔を選びました。
 合計4基を空港の周囲に配置しました。これで各辺で旋回する際、アンテナ塔を基準物として参照できます。
合計4基を空港の周囲に配置しました。これで各辺で旋回する際、アンテナ塔を基準物として参照できます。

 飛行した航跡は毎回非常に真っ直ぐで重なり合い、参照物がない場合のような曲がりくねったり不揃いになったりすることはなくなります。
飛行した航跡は毎回非常に真っ直ぐで重なり合い、参照物がない場合のような曲がりくねったり不揃いになったりすることはなくなります。

完
-
上昇、降下、水平飛行の練習
また出張で一週間ほど留守にしていたが、ブログを放置するわけにはいかないという精神で、簡単に更新しよう。
昨日帰宅してから、X-Planeで遊びながら息抜きをし、特に上昇と降下時の昇降計の数値に焦点を当てて練習した。 例えば、昇降計の針を毎分1000フィートに保ち、姿勢を変える際には操縦桿を押したり引いたりする操作を丁寧に行うという2点だ。
上昇や降下をする際は、まずピッチ姿勢を整え、その後でエンジンの推力を増減する。 垂直方向の速度が毎分1000フィート前後で徐々に安定したら、トリムを使って微調整するだけでいい。 操縦桿をほとんど操作しなくても、機体がその速度をキープして安定してくれているのを見ると、とても達成感があるよ。
水平飛行への復元操作も基本的には同じで、順番通りに操縦桿を操作してピッチ角を調整し、 その後推力を調整する。垂直方向の速度が毎分0フィートで徐々に安定したら、少しトリムを調整すればよい。
言葉にするのは簡単だが、実際の操作で機体の姿勢を安定させるのはそう簡単なことではない。 しばらく練習しないと手が慣れてなくなるので、やはり常々復習が必要だ。
以上
-
ILS進着の復習
ぶっつけ本番で一週間ほどX-Planeを放置していたが、待ちに待った週末、ようやく遊べる。
何を練習しようか? ふと思い出したのが、久しぶりのILSだ。では、軽く復習してみよう。
相変わらずセスナ172で、成田空港の滑走路16Lから離陸。 天気を見ると、3000フィートと8000フィートに雲がある。 というわけで、滑走路の方位に沿って直線的に上昇し13000フィートへ。 千葉県の有名な九十九里浜を越えたあと、西にあるArlonというウェイポイントへ向かう。
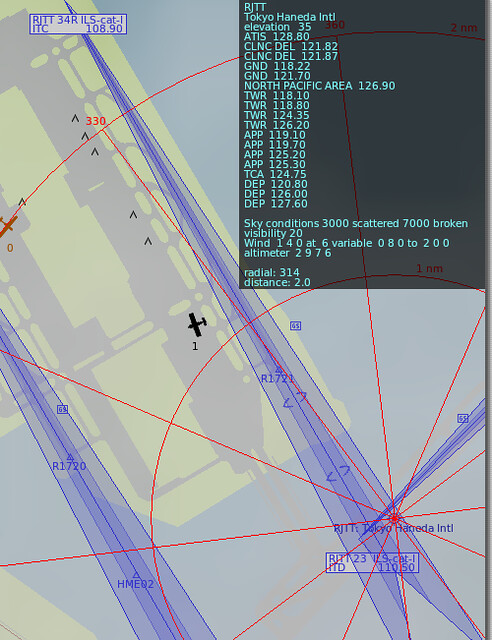
このArlonは、羽田空港滑走路34Rの標準到着経路(STAR)にあるウェイポイントだ。 実際の空管通信を聞けば、北風のシーズンには空管制官が各便を次々とこのポイントへ誘導しているのがわかる。 ここの指定高度は4000フィート。 <a href=“https://yinlei.org/x-plane10/2012/05/26/arlon.jpg"

日本のAIP(航空路誌)を調べてみると、ILS Zulu Rwy34Rのアプローチ図は以下の通り。
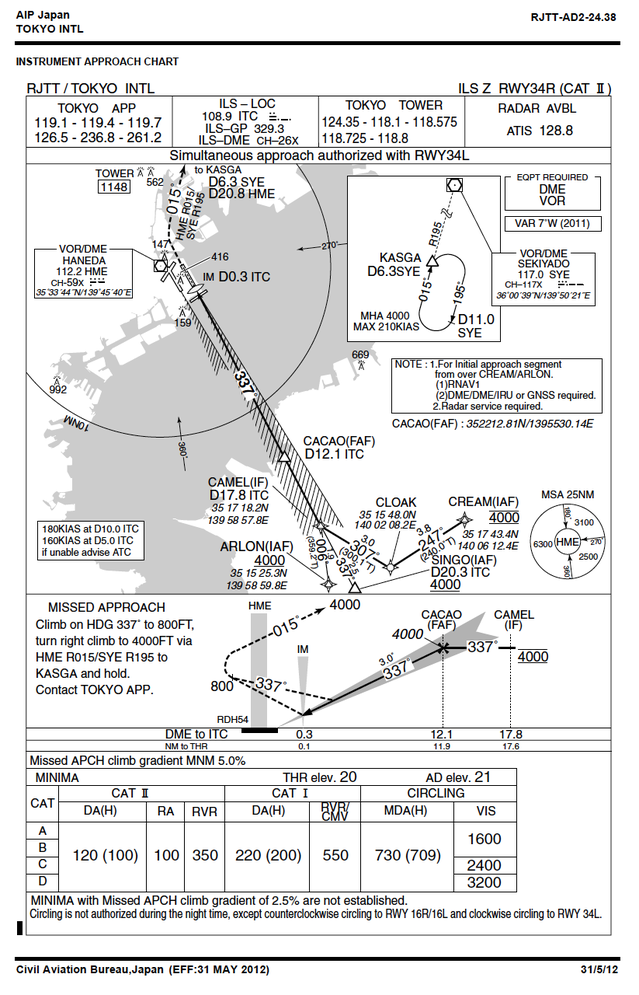 やはりArlonはILS計器進入方式のIAF(初期進入地点)で、高度は4000フィートだ。
やはりArlonはILS計器進入方式のIAF(初期進入地点)で、高度は4000フィートだ。羽田の天気も確認した。おや、風向140°?
 34R滑走路へ降りるなら、これは追い風じゃないか?
まあいい、少しくらいの追風なら問題ないだろう。東京湾へ大きく回り込むのは面倒だし。
上のアプローチ図によると、ILSの局の周波数は108.9MHzなので、NAV1を108.9MHzにセット。
高度を下げながらARLONへ向かい、到着時には4000フィートに下げる。
34R滑走路へ降りるなら、これは追い風じゃないか?
まあいい、少しくらいの追風なら問題ないだろう。東京湾へ大きく回り込むのは面倒だし。
上のアプローチ図によると、ILSの局の周波数は108.9MHzなので、NAV1を108.9MHzにセット。
高度を下げながらARLONへ向かい、到着時には4000フィートに下げる。Arlonで針路340度に旋回すると、羽田の滑走路が真正面に見える。
 ヨークを柔和に操作し、スロットルを絞りながら、ILSグライドスロープの垂直・水平針を中心に合わせるように調整する。
機体は安定して降下し、滑走路に近づいていく。
遠くに東京の高層ビル群が近づいてくるのが見える。
ヨークを柔和に操作し、スロットルを絞りながら、ILSグライドスロープの垂直・水平針を中心に合わせるように調整する。
機体は安定して降下し、滑走路に近づいていく。
遠くに東京の高層ビル群が近づいてくるのが見える。
 最終的に安定して着地。
最終的に安定して着地。
 まあまあ、今回の着地は自己評価で70点くらいか。
まあまあ、今回の着地は自己評価で70点くらいか。完
-
タイトル:ATIS 自動端末情報サービスについて
まず、Wikipediaからの紹介を引用します。
「自動端末情報サービス(Automatic Terminal Information System、略称ATISまたは情報通報)は、繁忙な空港において自動的に継続的に放送される情報サービスです。 通常、単独の無線周波数で放送され、 天候、使用可能な滑走路、気圧および高度計の設定値など、主な飛行情報が含まれます。 パイロットは通常、管制官などの部門と通信を確立する前にこの通報を聴取し、関連する状況を把握することで、管制官の作業負担を軽減し、周波数の混雑を防ぎます。 原則として通報は1時間ごとに更新されますが、天候が急変した場合はいつでも更新され、順にアルファベットコード A, B, C…Z で表され、ICAOが公表する標準的な文字解読法に従って判読されます。」
フライトシミュレーションに関して言えば、X-Planeはインターネットからリアルタイムで世界中の最新の気象情報をダウンロードし、 その情報に基づいて風向き、風速、雲の状態をシミュレートするため、プレイヤーはよりリアルにフライトシミュレーションの楽しさを感じることができます。
しかし、実際にプレイしてみると、どうもソフト内のATIS情報は現実のものと少し違うようなので、 自分で調べて、学習のまとめを書いてみることにしました。
まず、手持ちの<a href=“http://www.bjicom.com/ProductDetailed.aspx?uid=76"アイコム携帯無線機 ICOM IC-R6を使って、羽田空港のATIS放送を聴取してみました。
 そして録音し、何度も聴いた後、ようやく書き留めることができました。
rjtt_atis.m4a
そして録音し、何度も聴いた後、ようやく書き留めることができました。
rjtt_atis.m4a“Tokyo International Airport,information Kilo,2130, ILS Zulu Runway 34L approach, Landing Runway 34L, Departure Runway 05 and 34R, Departure Frequency, 126.0 Runway05, 123.8 Runway34R Wind 180 degrees 6 knots, Direction variable between 160 and 230 degree, Visibility 9 km, Few 1 thousand 5 hundred cumulus,Bkn 14 thousands altocumulus Temperature 20, dewpoint 15 QNH 29.80 inches Advise you have information Kilo”
-
訓練日記:ホノルル空港のトラフィックパターン
ずっと家の近くのRJTAをホームグラウンドとして、ここで練習を行っていました。 しかし、ここ数日は風が強く、訓練にはあまり適さないため、以前自分が実際に操縦したハワイのホノルル国際空港に場所を変えました。
到着したばかりの頃は空港にまだ不慣れで、適当に26L滑走路を選んで、まずは1時間のタッチアンドゴーを行いましたが、 航跡はもちろんガタガタで、
 高度の制御も上下に安定せず、
高度の制御も上下に安定せず、
 1時間かかってようやく地形に慣れ、ファイナルの操作も徐々に手応えを感じられるようになり、最後の着陸もまあまあ満足できるものでした。フルストップの後、アロハ塔をバックに記念写真を撮りました。
1時間かかってようやく地形に慣れ、ファイナルの操作も徐々に手応えを感じられるようになり、最後の着陸もまあまあ満足できるものでした。フルストップの後、アロハ塔をバックに記念写真を撮りました。

夜、食事をした後にさらに1時間飛び、練習の成果を定着させました。最後のファイナル進入のタイミングが少し早く、高度の降下もやや早かったことを除けば、大部分の着陸は満足できるものでした。 せっかくハワイに来たというのに、すぐそばのパールハーバーにも行かず、ひたすら練習に打ち込む姿勢は大したものです。ということで、記念に以下のスクリーンショットを残しました。
-thumb-600x406.png)
-thumb-600x155.png)
完
-
訓練日誌:飛行の基本操作練習
水平飛行、上昇、降下の基本操作に関する個人的なまとめです。今後忘れるのを防ぐために、まず書き残しておきます。
安定した水平飛行や上昇、降下を維持するためには、必ずまず出力を調整し、次に機体のピッチ姿勢を制御し、最後にトリムを調整します。
最初のステップである出力調整が重要なのは、エンジンの推力が航空機の上昇・降下状態を決定するからです。 一般の人のイメージでは、パイロットは操縦桿を引くと航空機は上昇し、押すと降下すると思われていますが、実際にはこれは誤った概念です。 操縦桿を引くことは確実に一時的に高度を上げますが、同時に推力を変えなければ、対気速度は絶えず減少し、最終的に航空機は失速に陥ります。 同様に、操縦桿を押して降下しようとすれば、機首は下がり続け、対気速度は増加し続けます。これにより揚力が増加し、かえって高度が上がってしまいます。 したがって、安定した高度の変化プロセスを維持するためには、必ず出力を調整することを覚えておいてください。 上昇から水平飛行への移行(レベルオフ)時は、まずエンジン推力を適切に減らします。水平飛行から上昇に入るときは推力を増やし、水平飛行から降下に入るときは推力を減らします。
2番目のステップであるピッチ姿勢の調整ですが、その目的が高度の調整ではないとしたら、何でしょうか?それは対気速度を調整するためです。 操縦桿を押すと、機首が下がって加速します。操縦桿を引くと、機首が上がって減速します。 ここで注意すべきは、速度の増減にはある程度の範囲があることです。大幅な加速が必要な場合は、やはりエンジン推力を増加させる必要があります。
3番目のステップであるトリム調整は、主に操縦桿を引いたり押したりする力を軽減するためのものです。したがって、出力と姿勢がほぼ安定し、高度と速度が安定した後で、トリムを適切に調整して、パイロットが常に力を入れて操縦桿を保持する必要がないようにし、操縦の負担を軽減します。 ここで注意すべき点は、トリムはあくまで補助的な操作であるということです。高度や速度の調整は主に出力とピッチ姿勢に頼るべきであり、トリムを過度に操作しないようにしてください。
実際の操作練習 あなたが現在95ノットで水平飛行中、出力2200rpm、高度2000フィートの状態にあり、これから3000フィートまで上昇するとします。 セスナ172の最高上昇率を得るための速度(Vy)は75ノットです。したがって、まず対気速度を落とすために操縦桿を引いて機首上げます。 速度が75ノットに近づいたら、スロットルを2400rpmまで開けます。高度は上がり続けます。同時に速度を安定させるには、ピッチを微調整する必要があります。速度が安定したら、操縦桿にかかる力がゼロになるようにトリムを調整します。 これで安定した上昇段階に入りました。
高度が3000フィートに近づいたら、一般的に上昇率が1000フィート/分の場合、その数値の10分の1、つまり目標高度から100フィート手前の2900フィートで操縦桿を押し、機体の姿勢を水平に戻すよう制御します。同時に機体は加速します。水平飛行の約90ノットに戻った時点で、スロットルを2200rpmまで戻します。 3000フィートに到達したら、ピッチを徐々に調整し、速度を95ノット前後で安定させます。 高度と速度が共に安定したら、最後にトリムを行います。 これで3000フィートの安定した水平飛行状態に入りました。
3000フィートの水平飛行、出力2200rpm、対気速度95ノットの状態から2000フィートまで降下する場合、 まずスロットルを1800rpmまで絞り、操縦桿を引いて速度を85ノット前後に調整します。その後、トリムを調整します。速度が安定すれば、これで安定した降下段階に入ります。 2100フィートに到達したら、スロットルを2200rpmまで戻し、操縦桿を押して機体の姿勢を水平に戻します。 高度が2000フィートに達したら、速度を95ノットに維持するよう制御し、トリムを調整します。 これで2000フィートの安定した水平飛行状態に復帰しました。
以上
-
訓練日誌:2週間ぶりの練習 トラフィックパターンとタッチアンドゴー
出張のため2週間ほどX-Planeの練習ができず、勘が鈍るのが心配なので、週末を使って早速復習しました。
今日も主に touch and go の反復練習で、空港を周回しつづけました。

飛行軌跡を見ると、やはり base leg での問題が最も大きいようです。速度が少し速すぎ、final approach に入るタイミングが遅れます。さらに、機首がうまく滑走路中央に向きません。
自分の traffic pattern の操作は、概ね以下の通りです:
departure leg: 55ノットで機首を起こし、上昇速度80〜90ノットで上昇。300フィートでスロットルを2000rpmまで減らし、500フィートで旋回。 この段階では、2点の操作が重要だと感じています。1つはラダー操作で、滑走路での taxi や離陸直後に機体が左に偏るように感じます(おそらくP-Factorの影響でしょう、この記事が参考になります)。そのため、turn coordinator のボールを観察し、ラダーを使って中央に保つように注意します。もう1つは、離陸直後は機首が上がりすぎる傾向があるため、適度に機首を押さえて上昇角が大きくなりすぎないようにします。
crosswind leg: 上昇速度80〜90ノットを維持し、900フィートで旋回。 この段階でも上昇角が大きくなりすぎないように注意が必要です。crosswind leg を少し長めに取り、base leg で調整する時間を確保します。
downwind leg: スロットルを1800rpmまで絞り、1000フィートで水平飛行に移行、巡航速度90ノット。 滑走路端と並行した時点でスロットルを1500rpmに絞り、高度を800フィートまで降下させ、ピッチを上げて速度を80ノットまで落とします。 ここで難しいのは、減速のために機首を上げると降下率も増加することです。そのため、800フィートに達するまで時間がかかり、焦ってしまいます。この操作はまだ練習が必要です。 滑走路端と翼が45度の角度になったときに base leg に入るべきですが、高度調整に時間をかけすぎるため、旋回時の角度が30度を下回ることもしばしばでした。
base leg: スロットルを1400rpmまで絞り、機首を上げて速度を70ノットまで落とし、フラップを10度下げます。500フィートから旋回を開始します。 この段階の問題は、速度のコントロールがまだ不自由で、時間がかかると滑走路を通り過ぎてしまうことです。上の図にあるように、final でS字を飛んでしまい、軌跡がかなり惨めです。
final approach: スロットルを1300rpmまで絞り、速度65ノット。速度が高すぎる場合はフラップ20度まで下げますが、速度のコントロールに問題がなければ、これ以上フラップを下げなくても大丈夫なようです。滑走路端でスロットルを完全に絞り、ラダーで滑走路の中央線に向かい、浮き上がらずに着陸します。 この段階の問題は、やはり滑走路端に正対できず、横風着陸のような姿勢になり、奇妙に感じることです。また、高度が下がりすぎ、滑走路に接近した際に高度を維持するためにスロットルを開けなければならないこともあります。四辺と五辺で、より小さく安定した降下率を維持することが、今後の重要な課題です。
以上
-
訓練日誌:速度と高度を維持する難しさ
引き続き Cessna 172 で Touch and Go と急旋回の練習を続けています。 急旋回は、以前に比べて高度とバンク角の維持が少し上手くなってきました。 ローカルマップに描かれた、8の字に近い航跡を見ると、少し達成感があります。 これまでの操縦では、意識を主に高度とバンク角に集中させていましたが、数日間の練習で少し上達したものの、速度の安定性についてはあまり気にかけていませんでした。
今日の飛行では、対気速度計をより注意深く観察しましたが、速度の変動がかなり大きいことがわかりました。 80ノットから100ノットの間で非常に不安定であり、これはまだ不十分です。 今後は、速度の変動を10ノット以内に収めることを意識して、練習を重ねていく必要があります。
Touch and Go の課題は、依然としてベースレグ以降の降下率が大きすぎることで、高度が低下しすぎてしまうことです。 意識するようになってからは多少改善されましたが、まだ理想的とは言えません。この課題については、時間をかけてゆっくり解決していく必要があります。
-
訓練日記:タッチアンドゴー
今日は土曜日で、ようやく存分に練習する時間ができたので、空港は家の近くのRJTAに選んだ。 ATCのことは気にせず、離陸後は直接5辺の周回経路に入り、タッチアンドゴーを行った。 一周また一周と、だいたい15回ほど飛んで、ようやくフルストップした。
今日の収穫は、地上の標識を注意深く観察することだ。いつクロスウィンドレッグに入り、いつダウンウィンドレッグに入り、いつベースレッグに入るか。 最初は滑走路を参照物にしていたため、視点を絶えず切り替える必要があり、極めて煩雑だった。 後には、地上の目立つ目標、例えば高層ビル、高速道路、あるいは公園のような広大な緑地などを探すようにした。 これらを参照にすれば、旋回時に操縦に集中でき、滑走路の位置を確認し続ける必要がなくなる。
実際に飛行した後にローカルマップを見てみると、地上の目標を参照にした後では、以前とは明らかに違う航跡になっていた。 以前の航跡は歪んでいて不規則な四辺形だったが、後のものはほぼ四辺形に近くなっていた。4つの角がまだすべて90度ではないが、かなり改善された。
今後もさらに練習が必要だな。
-
急旋回の練習についての考察
ここ数日、バンク角45度の急旋回(Steep Turn)の練習をしています。 以前、アメリカで飛行免許を取得している人々のブログを読むと、通常、1〜2回のフライトの後からこの項目の練習に入るようですが、 多くの人は、一定の高度を維持しながら45度のバンク角を保つのは、最初はなかなか難しいようです。
X-Plane上で自分がそれができるか試すために、何度か飛んでみましたが、案の定、高度の維持はうまくいかず、あっという間に500フィートも落ちてしまいました。。。
そこで資料を調べて学んでみたところ、例えばこの Rod Machadoの地面飛行学校.pdf の第9課には次のように書かれています。
" 急旋回は上級飛行への stepping stone であり、頻繁に練習することで、フライトコントロールにおいてますます熟練していくことに気づくでしょう。。。
機が急旋回に入った際、外部の視覚的线索 を判断の根拠にする必要があります。。。
フライトシミュレーションでは、機が45度のバンク角で旋回に入るとき、機首上げ6度の姿勢になるまでピッチ角を徐々に増やす必要があります。その後、高度を維持するためにどのような微小なピッチ修正が必要かを判断するために、高度計を監視するべきです。 コツは他でもなく、小規模な修正を行い、高度計を凝視して機が下がらないようにすることです。
必要に応じて、エルロンに圧力を加え、バンク角が増す力を打ち消します。高度を維持するためにスティックに力を入れているとき、バンク角が傾きすぎないように、スティックを反対方向に動かしてエルロン操作を行う必要があるかもしれません。
トリム(Trim)は、機をある飛行段階に比較的長く維持する場合にのみ必要であり、急旋回は瞬時に状況が変化するため、通常はトリムを合わせる必要はありません。 高対気速度時に失速に近づいている状態を警告してくれるのは、スティックに加えている引く力そのものです。これが、急旋回でトリムを合わせない理由です。
高度の変動を100フィート以内、対気速度の変化を10ノット以内、旋回後の針路のずれを10度以内に収めてください。 "
練習を数回続けたところ、計器ばかりに注目するのではなく、大地とコックピットの視点により注意を向けることがやはり重要だと感じました。 特に、45度の時の地平線と機の操作パネル(パネル線など)の位置関係と角度を覚え、機がその位置から逸脱した後、絶えず引いたり押したりして修正を加えたり、バンク角が大きすぎる場合は軽く反対方向にロールして角度を戻したりするというテクニックを使って、現在では高度の変動はだいたい100フィート程度に抑えられるようになりました。
また、以下のYouTubeの動画も参考になるでしょう。



{kind=link}