旅客機の操縦探秘6.9 搭乗橋に到着
この連載は半年以上更新していませんでしたが、申し訳ありません。 先日、搭乗橋(搭乗橋)への誘導を行うエプロンの誘導員( marshaller)の写真を撮ることができました。 搭乗前とはいえiPhoneで撮ったものですが、結果は満足のいくものでしたので、ようやく更新を再開できます。
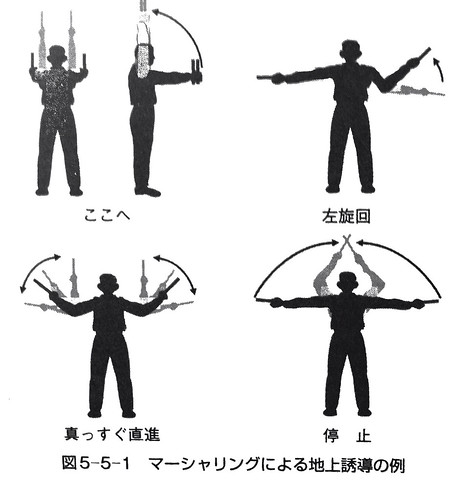
まず、誘導員がイエローパネル(手信号板)を持って誘導する際の一般的なジェスチャーを見てみましょう。
 パイロットの視点から見ると、
例えば機体を左に**旋回**させるよう誘導する場合、上の図の右下の例に示すように、
誘導員は右腕を水平に伸ばし、左腕を絶えず上下に振ります。
その振る速度は、パイロットが調整すべき**旋回**率の大きさを伝えます。
パイロットは誘導員のジェスチャーを注意深く観察し、そのリズムに合わせて、
スムーズに操縦輪(ノーズホイール・ステアリング)を操作し、機体を**誘導路**(lead-in line)の真上に保って**滑走**します。
パイロットの視点から見ると、
例えば機体を左に**旋回**させるよう誘導する場合、上の図の右下の例に示すように、
誘導員は右腕を水平に伸ばし、左腕を絶えず上下に振ります。
その振る速度は、パイロットが調整すべき**旋回**率の大きさを伝えます。
パイロットは誘導員のジェスチャーを注意深く観察し、そのリズムに合わせて、
スムーズに操縦輪(ノーズホイール・ステアリング)を操作し、機体を**誘導路**(lead-in line)の真上に保って**滑走**します。
次の写真は、A320機を左に旋回させるよう誘導されているエプロンの誘導員を撮影したものです。
場所は大阪の関西国際空港です。

手元の「旅客機操縦マニュアル(客機駕駛手冊)」という本によると、 パイロットは地上での滑走速度を5ノット(knots)以下に保つべきであり、 また、ステアリング操作は穏やかに行う必要があります。なぜなら、急すぎる操舵では、 客室の乗客が左右の揺れを感じ、非常に不快になるからです。 一方、熟練したパイロットの操作であれば、乗客は機体が地上で左右に調整されていることを感じさせません。
機体が搭乗橋の方向に向いた後、誘導員は前進方向の微調整を続けます。
下の図のように、
 前輪はほぼ誘導路上にありますが、まだ少し右側への調整が必要です。
そのため、誘導員は右腕をゆっくりと振り、機体が完全に搭乗橋の方向に合うよう誘導します。
前輪はほぼ誘導路上にありますが、まだ少し右側への調整が必要です。
そのため、誘導員は右腕をゆっくりと振り、機体が完全に搭乗橋の方向に合うよう誘導します。
機体が搭乗橋に接近すると、誘導員は両手を高く上げ、
左右にゆっくりとイエローパネルを振り、上の図の左下に示すように、機体をゆっくりと前方へ滑走するよう誘導します。

振る速度が一定であれば、パイロットは現在の速度を維持する必要があることを意味し、 振る速度が速くなれば、パイロットは適度に速度を上げる必要があることを意味します。 逆に、振る速度が徐々に遅くなれば、速度が少し速すぎることを意味するため、パイロットは適度に減速する必要があります。 パイロットはこの時、ブレーキを軽く踏み、誘導員の両腕の動きに合わせる必要がありますが、 絶対に機体を停止させてはなりません。 なぜなら、慣性のために、巨大な旅客機は一度停止してしまうと、 再びスロットルを開けて前進するための推力を得る必要があり、 また、短い距離内では速度を大きくすることができないため、 これは非常に困難な操作になるからです。
搭乗橋に近づくにつれて、誘導員の腕を振る速度はますます遅くなり、
パイロットはブレーキを軽く踏み続け、機体はゆっくりと移動し、いつでも停止できる状態になります。
 すると、誘導員は両手を水平に伸ばし、頭上までゆっくりと持ち上げます。最上部の図の左下に示すように、
両手が交差したときは、機体が停止位置に到達したことを意味します。
それと同時に、パイロットは同時にブレーキをしっかりと踏み、機体が停止位置を通り越さないようにしなければなりません。
すると、誘導員は両手を水平に伸ばし、頭上までゆっくりと持ち上げます。最上部の図の左下に示すように、
両手が交差したときは、機体が停止位置に到達したことを意味します。
それと同時に、パイロットは同時にブレーキをしっかりと踏み、機体が停止位置を通り越さないようにしなければなりません。
機体が完全に停止した後、地上の整備員が車輪の前後に車輪止め(chock)を置き、 パイロットはエンジン停止の手順を開始することができます。
手動による誘導のほか、現在多くの空港では、自動航空機視覚駐機誘導システム(Visual Docking Guidance System)が導入されており、
パイロットは前方のディスプレイの指示に従って、機体を駐機スポットへ滑走させることができます。

視覚駐機誘導システムは、ディスプレイと機体の距離を測定するレーザースキャナーで構成されています。 システムは機種を検出・分析し、レーザーで機体の位置を追跡し、その結果を画面に表示します。 ディスプレイ上の情報には主に以下のものが含まれます: 機種 センターラインからのずれ情報 駐機位置までの距離
地上運用者が手動コントロールパネルを使用して機種情報の入力とチェックを完了すると、
システムは自己診断を開始し、スキャンを開始します。
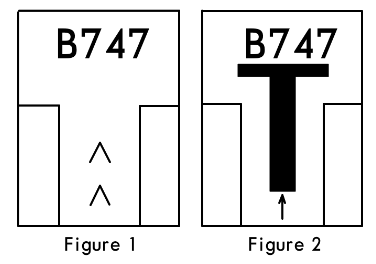
まだ接近する機体を検出していないとき、画面の上部には機種情報が表示され、下部には絶えず上に移動する黄色い矢印が表示されます。
下の図Figure 1のように、
 パイロットは搭乗口へ滑走する際、この信号によってシステムがアクティブになり、自分の機体を待機していることを知り、
これによって誘導操作を開始します。
パイロットは搭乗口へ滑走する際、この信号によってシステムがアクティブになり、自分の機体を待機していることを知り、
これによって誘導操作を開始します。
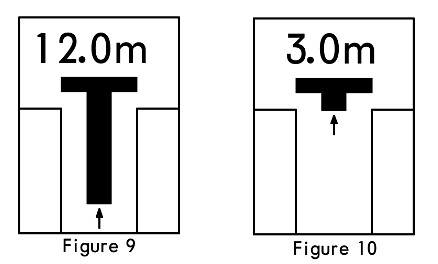
レーザーが接近中の機体を検知すると、システムは画面中央にT字形のマークの表示を開始し、 T字の下には小さな上向きの矢印が表示されます。上の図Figure 2に示す通りです。
機体が停止位置から12メートルの距離に接近すると、システムは機種が事前に入力された機種と一致するかどうかの識別を開始します。
情報が一致すれば、システムは誘導を継続します。
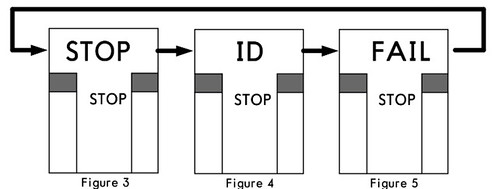
しかし、システムが情報の不一致を発見した場合、画面の上部には「STOP-ID-FAIL」のエラーメッセージが交互に表示され、
同時に画面中央には2つの赤い四角形の警告情報が表示されます。
 この情報を見た後、パイロットは直ちに機体の前進を停止しなければなりません。
この情報を見た後、パイロットは直ちに機体の前進を停止しなければなりません。
システムが機体の滑走速度が速すぎると検知した場合、画面には「SLOW」の文字が表示され、
 パイロットに速度を落とし、機体が駐機スペースを突き出さないよう警告します。
パイロットに速度を落とし、機体が駐機スペースを突き出さないよう警告します。
システムが機体がセンターラインから逸脱していると検知した場合、
画面のT字の下部左右に上向きの黄色い小さな矢印が表示され、
機体が現在の位置で中心線の左側または右側にずれていることを示します。
同時に画面上部にも、右または左を指す点滅する赤いカーソルが表示され、
パイロットに右または左へ針路を調整するよう促します。
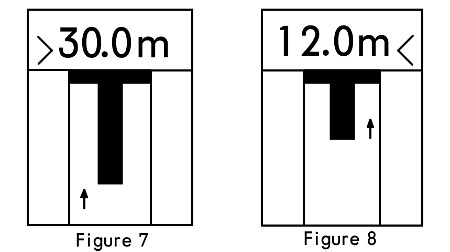
機体が駐機位置から30メートル以内に入ると、画面上で距離情報の表示が始まり、 1メートル近づくごとに、30.0m、7.0mのように、メートル単位でデータが更新されます。 機体が駐機位置から2メートル以内に入ると、0.2メートル近づくごとに、画面上の数字は0.2メートル単位で更新されます。
機体が駐機位置から16メートル以内に入ると、画面上のT字マークの縦棒の長さも短くなり始めます。
この表示は、機体と駐機点との距離の長さを視覚的に表現するだけでなく、距離の短縮率も確認でき、
パイロットが滑走速度をより適切に制御するのに役立ちます。
縦棒の長さの変化率は、0.5メートル近づくごとに1目盛り減少します。
機体が駐機位置に到着すると、画面上に「STOP」の表示が開始され、同時に画面中央の両側に2つの赤い四角形が表示されます。
下の図のように。

機体が正しく駐機スポットに停止すると、画面上には「OK」の文字が数秒間表示されます。下の図Figure 12のように。
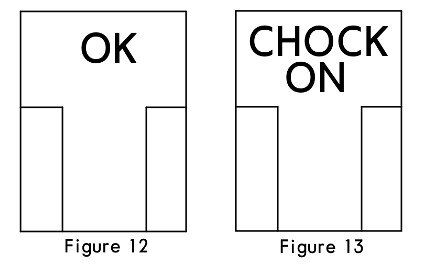
地上の整備員が着陸脚安全ピン(ギアピン)を挿入し、システムの「CHOCK ON」スイッチを入れると、
画面にも同時に「CHOCK ON」の文字が表示され、パイロットにその操作が完了したことを通知します。
下の図Figure 13のように。
以上で誘導プロセスは終了です。
<a href=Prev: 着陸後の手順 TOC: 目次 <a href=Next: エンジン停止手順