ジェット機のコックピットを探る6.3 最終進入固定点とILSの設定
6.1節では、航空機が中間進入 fixing point IF (Intermediate Fix) を通過し、水平飛行の状態に入ることを説明しました。
この節では、IF から最終進入 fixing point Final Approach Fix (FAF) へ飛行する過程での操作について解説します。
IF と FAF の関係については <a href="/blog/ja/2013/03/ja-airline_pilot_54"5.4節 で紹介しましたが、ここでもう一度復習しておきましょう。
CDU の NAV/RAD ナビゲーション設定ページで、入力したデータに誤りがないか確認します。
例えば、着陸する滑走路の方位角が128度、無線周波数が110.90MHzであることを確認します。
下図はボーイング777の CUD 表示の概略図です。

フラップ展開の計画に基づいて「Flap 5」のようにフラップ・レバーを設定し、フラップとスラットの展開状況を監視します。
この時点で ATC の管制は塔へ移管されているはずです。 引き続き、東京羽田空港から北海道札幌新千歳空港へ向かう AirSystem115 便を例に説明します。
「アプローチ管制: Air System 115、Hayakita の南方 4 マイル、塔周波数 118.8 へ交信 パイロット: 118.8 へ変更、Air System 115」
パイロットは通信周波数を 118.8MHz に合わせ、塔を呼び出します。 「パイロット: Chitose 塔、Air System 115、Hayakita まで 2 マイル、Spot 16 塔: Air System、塔、了解、Hayakita 通過報告、滑走路 19L、風 220 度 12 ノット パイロット: Hayakita 通過報告 了解、19L、Air System 115」 塔は、パイロットに対し Hayakita 報告点を通過した後、再度連絡するよう求めています。
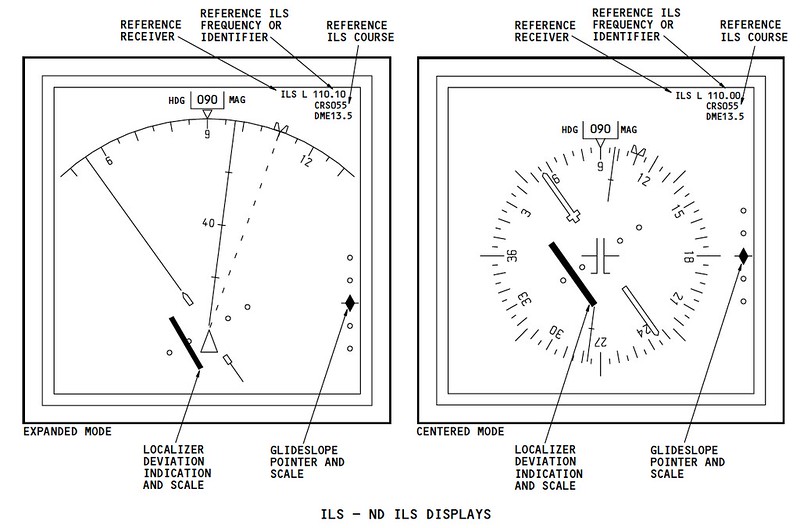
この時点で ND 上的グライドパスとローカライザの針が表示されているはずです。
Hayakita を通過した後、パイロットは塔に連絡し、塔はパイロットに対しベース(4辺)に入った後再度連絡するよう指示します。 「パイロット: Chitose 塔、Air System、Hayakita 通過 塔: Air System 115、了解、ベース入着報告、滑走路 19L、あなたは第1位、対空交通なし パイロット: ベース入着報告、19L、我々は第1位、Air System 115」
ベース(4辺)への入着を報告した後、塔は着陸許可を発出しました。 「パイロット: Chitose 塔、Air System 115、ベース旋回中 塔: Air System 115、塔、再確認、降着装置ダウン、着陸許可、滑走路 19L、風 220 度 14 ノット パイロット: 着陸許可、19L、Air System 115」
航空機は最終的に5辺へ入り、パイロットは MCP で APP モードに接続し、もう片方の自動操縦装置を起動します(作動していなかった側の A/P スイッチをオンにします)。
着陸局面では、左右の A と B 両方の自動操縦装置を同時に作動させる必要があることを覚えておいてください。
 この時、航空機の水平姿勢管理は HDG モード下にあり、ローカライザ LOC 信号を捕捉(キャプチャー)することが可能です。
そのため、FMA (Flight mode annunciation) の水平制御表示は HDG SEL/LOC 状態となり、
同様に垂直方向の制御も ALT とグライドパス G/S が同時に作用します。
この時、航空機の水平姿勢管理は HDG モード下にあり、ローカライザ LOC 信号を捕捉(キャプチャー)することが可能です。
そのため、FMA (Flight mode annunciation) の水平制御表示は HDG SEL/LOC 状態となり、
同様に垂直方向の制御も ALT とグライドパス G/S が同時に作用します。
航空機が ILS の LOC コースに切り込み始めます。
 もし機上の航法装置がすべて正常に動作していれば、針路とグライドパスは地上のアンテナから発せられる信号を捕捉することができ、
FMA の状態が変化し、水平制御は LOC 状態、垂直方向の制御は G/S 状態へと切り替わります。
これにより、計器着陸システム(ILS)が正式に着陸プロセスを引き継ぎ、ILS の電波を追跡して航空機の自動飛行を制御します。
もし機上の航法装置がすべて正常に動作していれば、針路とグライドパスは地上のアンテナから発せられる信号を捕捉することができ、
FMA の状態が変化し、水平制御は LOC 状態、垂直方向の制御は G/S 状態へと切り替わります。
これにより、計器着陸システム(ILS)が正式に着陸プロセスを引き継ぎ、ILS の電波を追跡して航空機の自動飛行を制御します。
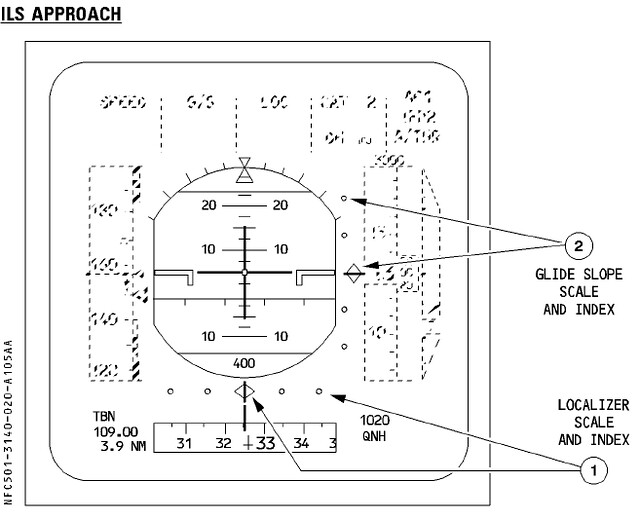
次に PFD 上の ILS 表示を見てみましょう。ボーイング777 を例にします。
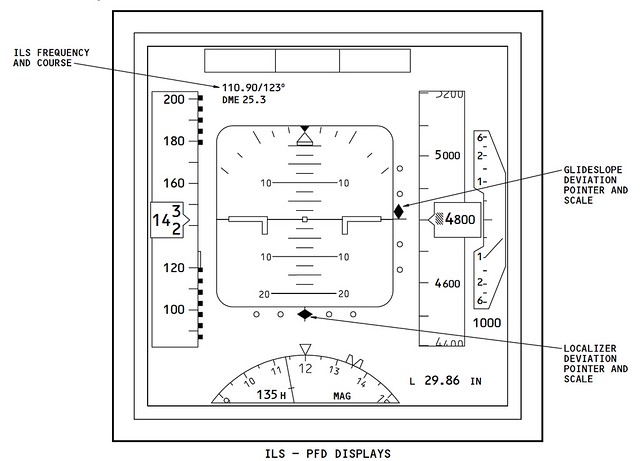 PFD 中央の姿勢指示器の右側にある菱形の表示部は、捕捉されたグライドパスの位置を示しています。
上の図の表示は、航空機の現在の高度が本来あるべきグライドパスの高度よりも低いことを示しているため、降下率を適度に減らして飛行高度を調整する必要があります。
姿勢指示器の下側にある菱形はローカライザの位置を示しています。この時、中央にあることは、航空機の飛行経路が正しく滑走路の方向に合っていることを意味します。
同時に、姿勢指示器の左上には ILS ローカライザ情報が表示されており、信号周波数、コース、および距離が一目でわかります。
PFD 中央の姿勢指示器の右側にある菱形の表示部は、捕捉されたグライドパスの位置を示しています。
上の図の表示は、航空機の現在の高度が本来あるべきグライドパスの高度よりも低いことを示しているため、降下率を適度に減らして飛行高度を調整する必要があります。
姿勢指示器の下側にある菱形はローカライザの位置を示しています。この時、中央にあることは、航空機の飛行経路が正しく滑走路の方向に合っていることを意味します。
同時に、姿勢指示器の左上には ILS ローカライザ情報が表示されており、信号周波数、コース、および距離が一目でわかります。
比較のために、ここでエアバス A320 の PFD に表示される ILS 情報も見てみましょう。
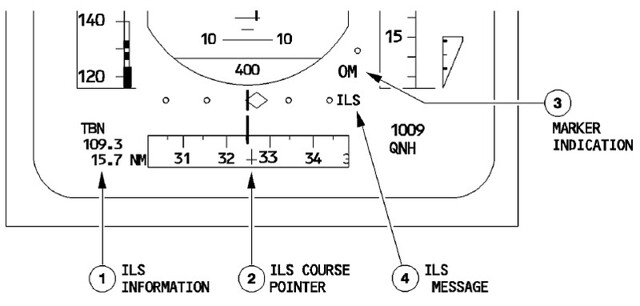 エアバスとボーイングの機上表示はほぼ同じであることがわかります。
姿勢指示器の右側にあるグライドパス、下方のローカライザ情報、ILS ローカライザ情報などは、これ以上説明する必要はないでしょう。
エアバスとボーイングの機上表示はほぼ同じであることがわかります。
姿勢指示器の右側にあるグライドパス、下方のローカライザ情報、ILS ローカライザ情報などは、これ以上説明する必要はないでしょう。
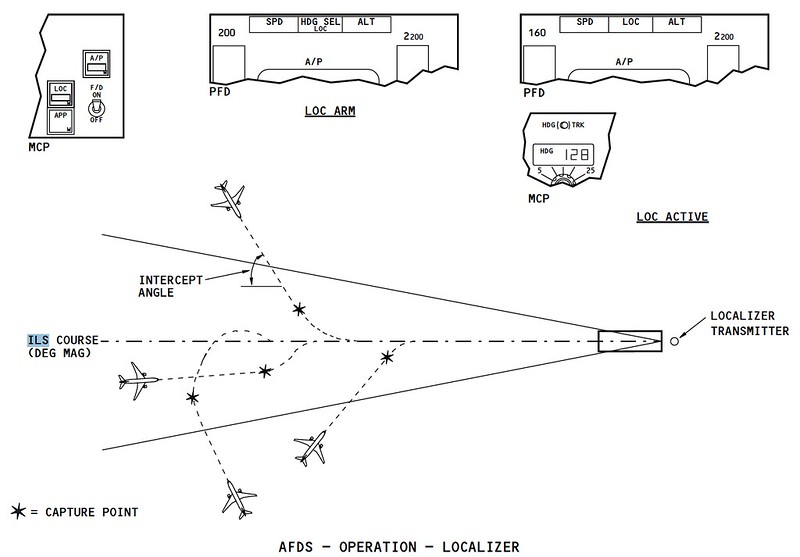
さて、一連の操作は以下の図でまとめることができます。資料はエアバス A320 シリーズのクルー訓練マニュアルからのものです。
 APP モードを接続すると、LOC と G/S モードが起動し、同時に2台目の自動操縦装置が接続されます。
ローカライザ LOC に切り込み信号を捕捉し、その後グライドパス G/S 信号も捕捉されます。
これにより、航空機は電波の誘導に従って高度を下げ始めることができます。
APP モードを接続すると、LOC と G/S モードが起動し、同時に2台目の自動操縦装置が接続されます。
ローカライザ LOC に切り込み信号を捕捉し、その後グライドパス G/S 信号も捕捉されます。
これにより、航空機は電波の誘導に従って高度を下げ始めることができます。
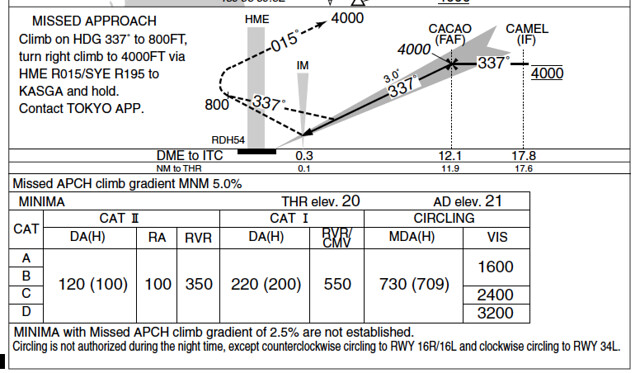
FMA 状態の一連の変化については、以前のボーイング737の日本語資料を見てみましょう。
 FAF を通過する過程の水平飛行段階において、28番目の操作は APP 進入スイッチ “Push APP” を起動することです。
2台目の自動操縦装置を起動し、“Push CMD B” は図中の29番目の操作です。
30番目でローカライザ信号が捕捉され、HDG SEL の表示が消えます。
31番目でグライドパス信号が捕捉され、ALT HOLD の表示が消えます。
上の図を見ながら、この節の最初の図と組み合わせると、より良く理解できます。
FAF を通過する過程の水平飛行段階において、28番目の操作は APP 進入スイッチ “Push APP” を起動することです。
2台目の自動操縦装置を起動し、“Push CMD B” は図中の29番目の操作です。
30番目でローカライザ信号が捕捉され、HDG SEL の表示が消えます。
31番目でグライドパス信号が捕捉され、ALT HOLD の表示が消えます。
上の図を見ながら、この節の最初の図と組み合わせると、より良く理解できます。