旅客機操縦の探秘6.1 レーダー誘導進着時の操縦
5.6節では、レーダー誘導を行う際の航空管制官との会話についてまとめましたが、以下では到着(アプローチ)進入中のパイロットの具体的な操作についてまとめます。
管制が「Air System 115, Turn Left Heading 040」のように針路の指示を発した場合、
つまり航空機に対して左旋回して方位角40度の針路をとるよう要求していることになります。
パイロットは、モード制御パネルMCP(Mode Control Panel)のHEADING(針路)ノブを調整し(下記のボーイング737のMCP図を参照)、
 ディスプレイ内の数値を040に合わせます。そしてノブの下にあるHDG SELスイッチを押すと、
この時、FMA(フライトモードアナウンス)のモードが変化し、それまでの水平航行LNAVから針路選択HDG SELモードに切り替わります。
ディスプレイ内の数値を040に合わせます。そしてノブの下にあるHDG SELスイッチを押すと、
この時、FMA(フライトモードアナウンス)のモードが変化し、それまでの水平航行LNAVから針路選択HDG SELモードに切り替わります。
この変化は、下図のFMA(Flight mode annunciation)飛行方式信号器の状態遷移図で確認できます。
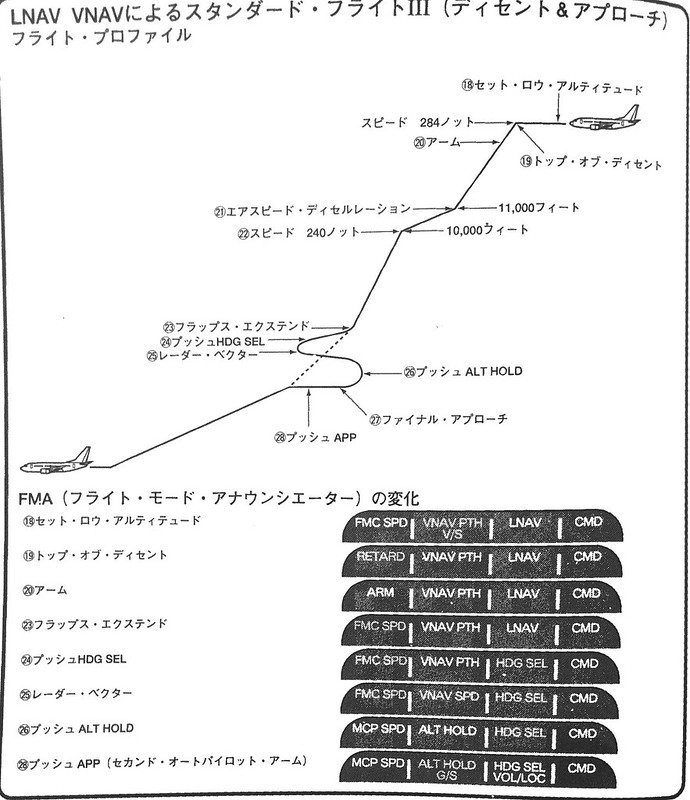 23の飛行状態において、HDG SELを押すと、水平方向の制御は24の針路選択状態に切り替わります。
したがって、針路の制御はフライト管理コンピュータではなく、パイロット自らの手動管理に移行します。
23の飛行状態において、HDG SELを押すと、水平方向の制御は24の針路選択状態に切り替わります。
したがって、針路の制御はフライト管理コンピュータではなく、パイロット自らの手動管理に移行します。
しかし、MCPは航空機の飛行方向を管理しているに過ぎず、具体的な旋回動作はコンピュータによる自動的な舵面の調整に依存していることを理解する必要があります。
一般的に、標準的な旋回では航空機は30度のロールを行います(単に垂直尾翼のラダーを動かすだけではありません)。
左右のエルロン(補助翼)によって生じる揚力の差を利用して機体を左右に傾け、旋回を行います。
例えば左旋回をしたい場合、左側のエルロンは上がり、右側のエルロンは下がります。そのため、右側の主翼が発生する揖力は大きくなり、
左側の揚力は小さくなります。両側の揖力のアンバランスにより、航空機の機体は左に傾き、左への旋回を開始します。

機首の方向が目標の針路に徐々に近づくと、コンピュータは再びエルロンを調整して傾斜角度を徐々に減少させ、 針路040度(北東方向)に到達した時、ちょうど航空機が水平飛行の状態になるようにします。
レーダー誘導が開始されたため、パイロットは垂直高度航行VNAVモードを切り、 手動高度制御モードを開始します。例えば、現在航空機が4000フィートの高度で水平飛行状態にある場合、 パイロットはALTITUDE(高度)ノブの下にあるALT HLDスイッチを押し、航空機を現在の高度に維持します。 それに伴いFMA飛行方式信号も切り替わり、自動スロットルモードはFMC SPDからMCP SPDへ、 同時にピッチモードはVNAV ALTからALT HOLDモードへと移行します。 この変化は、上記のFMA状態遷移図の第25および26項にそれぞれ示されています。 これにより、航空機の高度制御もFMCから切り離され、パイロットがMCP上で直接制御するようになります。
自動スロットルモードがFMC SPDからMCP SPDに入ると、 それまで表示されていなかったMCP上の速度指示器IAS/MACHが点灯し、 現在の航空機の対気速度が表示されます。 何も調整しなければ、コンピュータは自動的にスロットルを調整し、この速度を維持して飛行を続けます。 パイロットは、標準計器到着経路(STAR)および計器進入方式の要求に基づいて速度を調整し、 必要に応じて適切にフラップを下ろし、かつ対気速度が機体強度の制限を超えないよう、フラップ機動速度を管理します。
マニュアルの規定によると、フラップ機動速度は5.7節で言及したVREF基準速度を基準とし、 重量の変化に伴い、以下のフラップ計画に従って航空機の速度が失速速度以下にならないよう保証されています。
ボーイング737を例にとると、VREFを採用した場合のフラップ位置40におけるフラップ機動速度は以下の通りです: フラップ位置1 の時のフラップ機動速度 VREF+50ノット フラップ位置5 の時のフラップ機動速度 VREF+30ノット フラップ位置10 の時のフラップ機動速度 VREF+30ノット フラップ位置15 の時のフラップ機動速度 VREF+20ノット フラップ位置25 の時のフラップ機動速度 VREF+10ノット フラップ位置30 の時のフラップ機動速度 VREF30 フラップ位置40 の時のフラップ機動速度 VREF40
あるフライトのボーイング737-500がフラップ1の状態において、機動速度が190ノットであると仮定すると、 パイロットは速度指示器の下にあるノブを回し、表示値を190に設定します。
管制が「Air System 115, Descent and Maintain 3000」のように高度の指示を発した場合、 つまり航空機に対して3000フィートの高度まで降下するよう要求します。 したがって、パイロットは再び高度ALTITUDEノブを調整し、 高度を3000フィートに合わせ、モード選択の高度調整LVL CHGスイッチを押します。 コンピュータは再び自動スロットルを調整し、FMAのスロットルモードはMCP SPDからRETARD(減速)へ変化し、 スロットルはアイドル状態になり、機首が下を向いて降下を開始します。 同時にピッチ制御モードはALT HOLDからMCP SPDへと変わるため、 コンピュータは仰角を制御し、航空機が190ノットの速度を維持したまま飛行を続けます。
高度が目標値まであと100フィートに接近すると、FMAのピッチ制御はMCP SPDからALT ACQへと変化し、 降下を継続し、目標高度に到達すると、自動スロットルは自動的に前に押され、 航空機の高度を3000フィートに維持します。そしてFMAのピッチ制御は再び変化し、 ALT ACQからALT HOLD、すなわち高度維持状態へと移行します。
高度についてもう一つ、航空機が2500フィート以下に降下すると、 機上の無線高度計が自動的に起動し、その数値はPFDの中央下に表示されます。 無線高度計は、電波の反射原理を利用して航空機の地表面からの実高度を測定する機上無線設備です。
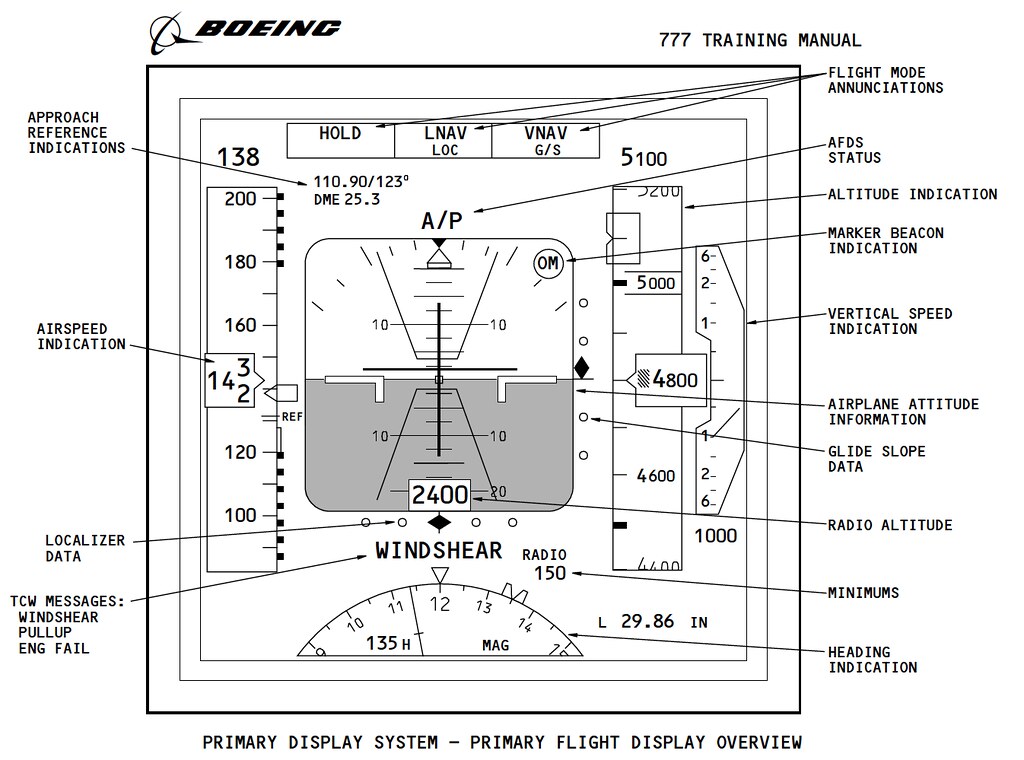 上図のボーイング777トレーニングマニュアルの解説を参照してください、
RADIO ALTITUDEの矢印が、無線高度計の表示2400フィートを指しています。
上図のボーイング777トレーニングマニュアルの解説を参照してください、
RADIO ALTITUDEの矢印が、無線高度計の表示2400フィートを指しています。
航空機は徐々に最終進入定点FAF(Final Approach Fix)に接近し始め、パイロットはILS進入の準備を開始します。
完