旅客機操縦の探秘 1.6 コックピットの準備作業
機長が地上で外部検査を行っている間、副操縦士ももちろん手を休めてはいません。彼はフライト前の予備手順とCDUのフライト前手順を完了する必要があります。 以下では、これらの作業について簡単に紹介します。
副操縦士は、まずコックピットで各種書類を検査します。 車には車検証が必要であるように、航空機にも航空機耐空年検が必要であり、耐空証明書のない航空機を飛ばすことはできません。 フライト日誌や整備記録には、航空機のすべてのフライト記録と整備記録が記録されており、これらの書類も絶対に欠かすことはできません。
次に、フライト準備会(ブリーフィング)で決定された燃料量が給油されているかを確認する必要があります。
その他、消火器、信号弾、懐中電灯、救急斧、脱出ロープ、救命胴衣、耐火アスベスト手袋、防火防煙フードなどの各種緊急機器も検査項目です。
救急斧は窓を破壊するために使用でき、脱出ロープは空港の天井に掛けられているロープです。不時着などの予期せぬ事態が発生し、ドアから脱出できない場合、天井の非常脱出口を開け、ロープを窓の外に投げ入れてから窓から外に出て、そのロープを伝って避難します。
 上の図は、ボーイング737のコックピット側窓非常口における緊急脱出の手順を示した図解です。
上の図は、ボーイング737のコックピット側窓非常口における緊急脱出の手順を示した図解です。
その他、テストスイッチが正常に動作するか、降着装置(ランディングギア)の降下、フラップの位置が準備できているか、エンジン潤滑油量、酸素圧などの初期設定もあり、非常に長い項目があるため、ここでは逐一列举すると退屈になるので割愛します。
現代の旅客機はすべて自動飛行管理機能を備えており、離陸、上昇、巡航、降下から最後の着陸まですべてコンピューターの制御によって自動的に行うことができることを知っています。その中で、飛行姿勢の制御は慣性航法システム(IRS)が担当します。パイロットは離陸前にIRS慣性基準システムを校正(アライメント)して、ナビゲーションをより正確にする必要があります。 慣性航法がどのようにジャイロと加速度計を用いて行われるかという原理については、今後機会があれば別に項目を設けて説明します。
校正設定は、FMSのCDUを通じて入力を行う必要がありますが、ではFMSとCDUとは何でしょうか?

FMS(Flight Management System:フライト管理システム)は、フライト管理コンピューターを中核とする航法・誘導および性能管理システムです。 エンジンが航空機の心臓部であると言われるなら、FMSは航空機の脳と言えるでしょう。 前述したIRSもFMSフライト管理システムの一部であり、コンピューターに針路情報を提供しています。 そしてCDU(Control Display Unit:制御表示装置)は、パイロットが重量、航空路など、飛行に必要な各種情報を入力するために使用します。そうすれば、コンピューターは離陸速度、エコノミースピード、巡航高度、エンジンの推力を自動計算し、各種制御指令を自動操縦および自動スロットルシステムに送信して、自動飛行を完了します。 例えば自動モードに入ると、ボーイング機のスロットルと操縦桿は自動的に前後左右に動き、まるで見えない手が操縦しているかのようになります。 FMSによってパイロットの操作負担は大幅に軽減され、各種機内機器の監視、航空交通管制の聴取、空中の交通状況および気象状況の観察により多くの時間を割くことができ、飛行の安全性が極めて高まりました。
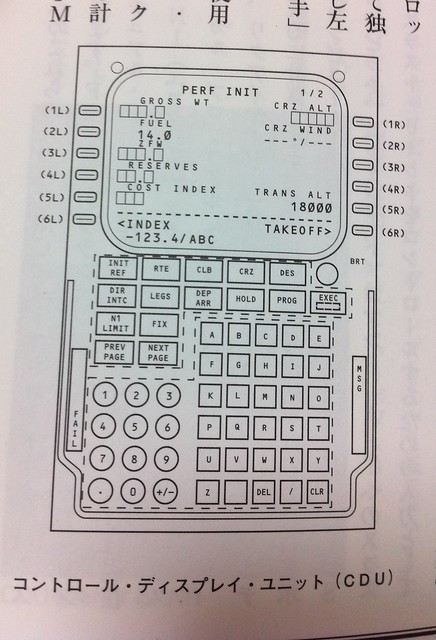 上図のように、CDUは画面、画面の左右に6つずつのボタン、および下にあるファンクションキー、英数字キーボードで構成されています。
画面の左側のボタンは上から順に1L、2L、3L、4L、5L、6Lと呼ばれ、
同様に右側のボタンは1R、2R、3R、4R、5R、6Rと呼ばれます。
それぞれのボタンは入力項目またはコマンドに対応しており、そのボタンを押すことは、そのコマンドを選択して実行すること、または英数字キーで入力した後のエンターキーを押すことに相当します。
上図のように、CDUは画面、画面の左右に6つずつのボタン、および下にあるファンクションキー、英数字キーボードで構成されています。
画面の左側のボタンは上から順に1L、2L、3L、4L、5L、6Lと呼ばれ、
同様に右側のボタンは1R、2R、3R、4R、5R、6Rと呼ばれます。
それぞれのボタンは入力項目またはコマンドに対応しており、そのボタンを押すことは、そのコマンドを選択して実行すること、または英数字キーで入力した後のエンターキーを押すことに相当します。
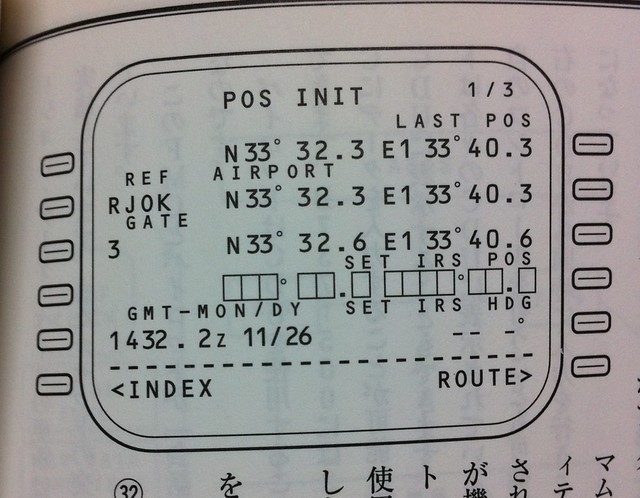
CDUへの初期データ入力には、機体タイプ、ナビゲーションデータベース、システム時刻の確認が含まれ、その後、現在の駐機場(ゲート)の現在地の緯度経度を入力して慣性航法システムの校正を完了します。
一般的に、駐機場のコックピットの正面には、現在地点の緯度経度を表示した標識があり、パイロットは顔を上げるだけでこのデータを見ることができます。下の図は、成田空港のあるゲートの表示です。

CDUの入力例は以下の図の通りです。現在の空港RJOK日本高知空港(2L)、3番ゲート(3L)、現在時刻(5P)、空港の緯度経度(2R)、3番ゲートの緯度経度(3R)の情報が入力されています。
 その後は、便のナビゲーションデータ、例えば便名、空港、航空路、滑走路などを入力します。
性能入力(PERF INIT)では、無燃料重量、燃料量、エンジン回転数N1の制限、重心(CG)などのデータを入力する必要があり、コンピューターは離陸時に必要ないくつかの重要な速度データ、V1、Vr、V2を計算します。
その後は、便のナビゲーションデータ、例えば便名、空港、航空路、滑走路などを入力します。
性能入力(PERF INIT)では、無燃料重量、燃料量、エンジン回転数N1の制限、重心(CG)などのデータを入力する必要があり、コンピューターは離陸時に必要ないくつかの重要な速度データ、V1、Vr、V2を計算します。
V1は離陸決心速度と呼ばれます。離陸時に滑走して加速し、V1に達する前に、機長がエンジン停止や回転数不足などの異常を感じた場合、離陸を中止(RTO)すべきです。V1速度よりも前であれば、航空機を減速させれば、現在の滑走路内に停止させることができるからです。 しかし、もし対気速度がV1を超えている場合、現在の滑走路長では航空機を停止させるのに十分な距離がなくなってしまいます。そのため、いかなる情况でも離陸を継続し、空中に上がってから検討と対処を行います。
Vrはローテーション速度です。この速度の前は、航空機はまだ地上での滑走状態を維持していますが、Vrに達した後、機長は操縦桿を引き(ローテーション)、機首が上がり、10〜15度の機首上げ姿勢(ピッチ角)を保って空中へ上昇します。
V2は安全離陸速度です。航空機が離地した後、姿勢角を適切に調整してV2までできるだけ早く加速し、その後標準的な上昇速度まで加速を継続します。
MCP(Mode Control Panel:モード制御パネル)に関しても、標準出発手順(SID)のコース番号をあらかじめ設定し、オートスロットルとフライトディレクター(FD)をOFFにし、対気速度(IAS/MACH)を設定し、針路(HEADING)を滑走路方向に、高度(ALTITUDE)をフライトプランの高度に設定するなど、事前に設定を行う必要があります。

ここでコックピットの準備手順はほぼ整い、機長と副操縦士はフライト前手順(航空機を正式に飛行状態に移行させる)を開始することができます。
<a href=Prev: 1.5 航行前地上検査 TOC: 目次 <a href=/2012/06/airline-pilot-17-cdu.">Next: 1.7 CDU設定詳解
完