X-Plane 10 747-400 離着陸、航空交通管制、計器飛行 実践 入門 完全チュートリアル
X-Plane 11が発売されました。最新のレポートは<a href="/x-plane10/x-plane11.>X-Plane 11情報まとめをご覧ください!
今日はボーイング747-400を使用して、東京羽田空港から北海道新千歳空港への計器飛行(IFR)を行い、 X-Plane 10のATC機能およびボーイング747-400の3Dコックピットの使用法をより深く理解します。 本文は<a href=“http://www.mgjshop.co.jp/"日本のソフトウェア代理店MGJ SHOPが提供する無料サポート文档を基に改编しており、 文中のすべての画像は本人が作成したものです。
#2013年5月25日 更新# 本日、x-plane 10.21バージョンで一から飛行ミッションを実行し、離陸上昇から巡航降下、盲降下まで問題ありませんでした。また、X-Planeの新バージョン10.21ではATCの時間割り当てが旧バージョンより大幅に改善されていることが分かったため、記事を少し修正しました。
1 フライトプランの作成 まず機体を選択します。Aircraft > Open AircraftメニューからHeavy Metal/B747 400 United/747-400 United.acfファイルを開き、 次にLocation > Select Global Airportメニューを開いて空港を選択します。東京羽田空港RJTTを選択し、ランプは任意のRAMP STARTで構いません。
#延伸阅读: <a href=<a href="/blog/ja/2012/06/xplane.html<a href=>“x-planeフライトプラン航路設定方法のまとめ <a href=<a href="/blog/ja/2012/06/ja-airline_pilot_13.html<a href=>“エアラインパイロット探秘 Airline Pilot 1.3 フライトプレパレーションミーティング フライトプラン紹介
フライトプランを提出する前に、まずATIS空港通報を聞いてみましょう。Shift 9またはShift 0キーを使用して視点を移動し、
座席の右手にあるラジオ台を見つけます。oキーで視点を固定し、マウスを使用してバンドをAMに設定し、
周波数を128.80に設定して⇔キーを押して活性化させます。下図の通りです。
 もしこの画像が見えない場合は、<a href=<a href="/blog/ja/2013/02/-flickr.html<a href=>“画像ファイルが見えない場合の解決法 --flickrの接続問題を参照して、PCの設定を少し行えば解決できます。
もしこの画像が見えない場合は、<a href=<a href="/blog/ja/2013/02/-flickr.html<a href=>“画像ファイルが見えない場合の解決法 --flickrの接続問題を参照して、PCの設定を少し行えば解決できます。
#延伸阅读: <a href=ATIS 自動ターミナル情報サービスについて <a href=<a href="/blog/ja/2012/06/post-9.html<a href=>“羽田空港航空交通管制周波数整理
各空港のATC周波数はLocationメニューのLocal Mapコマンドで確認できます。下図のように、RJTTの円をクリックすると表示されます。
<a href=-thumb-650x540.png)
また、ATISの内容が聞き取れなくても構いません。同時にテキスト情報が画面上に表示されるからです(下図参照)。

ATISとは何ですか? ATISはAutomatic Terminal Information Serviceの略称です。<a href=<a href="/blog/ja/2012/05/atis.html<a href=>“本サイトの別の記事を参照してその形式と聴取方法を理解してください。
もしソフトウェアがリアルタイム気象情報を更新できない場合は、<a href=<a href="/blog/ja/2012/05/real-weather.html<a href=>“このTIPSを参考にして解決できるか確認してください。
次に空港通報の情報に基づいて高度計の補正を行います。例えばATISが高度計3018を示している場合、
オートパイロットの左側にあるBAROノブを使って調整します(下図参照)。

調整後のデータはPFDの右下に表示され、緑色の数字3018が設定されていることが確認できます。
また、下図のPFD内の高度計は20と40の間を示していますが、海に面した羽田空港ではこの数値は正常です。

#延伸阅读: <a href=<a href="/blog/ja/2013/07/post-19.html<a href=>“気圧高度計の使用 <a href=<a href="/blog/ja/2012/10/ja-airline_pilot_43.html<a href=>“エアラインパイロット探秘 Airline Pilot 4.3 飛行高度と気圧および最大飛行高度
次にフライトプランを提出します。Enterキーを押してATCメニューを起動し、出発空港RJTT、巡航高度34000、目的地RJCCを順に入力します。
航路欄に入力する情報は当日の風向きによって決まります。
北風の時は34L/04/34R/05滑走路を使用し、以下を入力する必要があります
3537N13950E 3537N13958E 3544N13958E SYE JD 3830N14012E HANKA MWE CHE
南風の時は16R/22/16L/23滑走路を使用し、以下を入力する必要があります
3526N13956E 3530N14000E 3537N13958E 3544N13958E SYE JD 3830N14012E HANKA MWE CHE
Fileキーをクリックしてプランを完了させます。
<a href=-thumb-640x356.png)
下図は羽田空港から北海道新千歳空港への飛行ルートです:
 航路上のウェイポイントについては、<a href=“http://www.opennav.com/"open navというウェブサイトを使って確認することができます。
例えば「SYE」などの情報を入力して検索すると、このウェブサイトは<a href=“http://www.opennav.com/navaid/JP/SYE/SEKIYADO"そのウェイポイントの経緯度と地図を表示し、近くのウェイポイントや航法局のリストも表示するので非常に便利です。
航路上のウェイポイントについては、<a href=“http://www.opennav.com/"open navというウェブサイトを使って確認することができます。
例えば「SYE」などの情報を入力して検索すると、このウェブサイトは<a href=“http://www.opennav.com/navaid/JP/SYE/SEKIYADO"そのウェイポイントの経緯度と地図を表示し、近くのウェイポイントや航法局のリストも表示するので非常に便利です。
#延伸阅读: <a href=<a href="/blog/ja/2012/09/ja-airline_pilot_41.html<a href=>“エアラインパイロット探秘 Airline Pilot 4.1 ナビゲーションの基本知識
2 飛行準備
まずフライトプランを提出します。無線周波数を羽田デリバランス管制CLD 121.82MHzに合わせ、
Enterキーを押してATCメニューを起動し、Request Clearanceを選択してクリアランスを要求します。
Cleared IFR to RJCC as filed maintain FL340, squawk 4701という回答を得たら、
再びEnterを押してReadback Transmissionを選択して復唱します。
 同時にsquawk番号4701をトランスポンダー(副操縦士席の左側にあります)に入力します。
同時にsquawk番号4701をトランスポンダー(副操縦士席の左側にあります)に入力します。

もし航空交通管制(ATC)にあまり詳しくない場合は、本サイトの以下の2つの記事を読んで基本を理解することをお勧めします。 これらの記事は「機長席」という日本の書籍を基に改编しており、 羽田空港から北海道新千歳空港へのフライトの航空交通管制のすべての会話が詳しく紹介されている、素晴らしいATC入門資料です。 <a href=<a href="/blog/ja/2012/05/atc-air-traffic-control-1.html<a href=>“航空交通管制ATC (Air Traffic Control) 基礎知識 -1 <a href=<a href="/blog/ja/2012/05/atc-air-traffic-control-2.html<a href=>“航空交通管制ATC (Air Traffic Control) 基礎知識 -2
もしx-plane 10のATCの使い方に不慣れな場合は、<a href=<a href="/blog/ja/2011/12/atc.html<a href=>“本サイトのこの記事を参考にしてみてください。
次に、FMSフライトマネジメントシステムにウェイポイントを入力する必要があります。CDUコントロールディスプレイユニットを使って以下の情報を入力します。
下図の通りです。

具体的な入力方法は以下の通りです。括弧内はCDUのキーボードです。 北風時: [INIT REF] [DEP ARR] RJTT [NEXT PAGE] [PROG] 035.610 0139.836 [NEXT PAGE] [PROG] 035.609 0139.960 [NEXT PAGE] [PROG] 035.736 0139.968 [NEXT PAGE] [NAV RAD] SYE [NEXT PAGE] [RTE] JD [NEXT PAGE] [PROG] 038.505 0140.205 [NEXT PAGE] [FIX] HANKA [NEXT PAGE] [RTE] MWE [NEXT PAGE] [RTE] CHE [NEXT PAGE]
南風時: [INIT REF] [DEP ARR] RJTT [NEXT PAGE] [PROG] 035.441 0139.928 [NEXT PAGE] [PROG] 035.495 0139.999 [NEXT PAGE] [PROG] 035.609 0139.960 [NEXT PAGE] [PROG] 035.736 0139.968 [NEXT PAGE] [NAV RAD] SYE [NEXT PAGE] [RTE] JD [NEXT PAGE] [PROG] 038.505 0140.205 [NEXT PAGE] [FIX] HANKA [NEXT PAGE] [RTE] MWE [NEXT PAGE] [RTE] CHE [NEXT PAGE]
一つ一つ入力するのは確かに面倒なので、以下のURLから既に作成されたルートファイルを直接ダウンロードできます。
航路ファイル
このファイルを解凍し、JRTT-RJCC North.fmsとJRTT-RJCC South.fmsをX-Plane 10/Output/FMS plansディレクトリにコピーし、
CDU画面の2列のコマンドキーの一番左下の-キー(L6キー)を押すと、fmsファイルを読み込むことができます。
fms情報の入力に成功すると、航法表示NDに赤色の航路情報が表示されます。
<a href=-thumb-640x657.png) 今回は高度500フィートで最初のウェイポイントにおいてEXECを選択して直接進入モードに入ります。
今回は高度500フィートで最初のウェイポイントにおいてEXECを選択して直接進入モードに入ります。
#延伸阅读: <a href=<a href="/blog/ja/2012/06/ja-airline_pilot_17-cdu.html<a href=>“エアラインパイロット探秘 Airline Pilot 1.7 FMS CDU設定詳解 <a href=<a href="/blog/ja/2012/07/ja-airline_pilot_18.html<a href=>“エアラインパイロット探秘 Airline Pilot 1.8 飛行前手順とコックピット内部
次にオートパイロットを設定します。離陸後500フィートでオートパイロットを起動しますが、事前に設定しておく必要があります。
フライトディレクター (F/D): ON
高度 (ALT): 34000
高度層変更モード [FLCH]: ON
針路 (HDG): まだ設定しない
針路保持 [HOLD]: ON
速度指示 (IAS/MACH): 170ノット
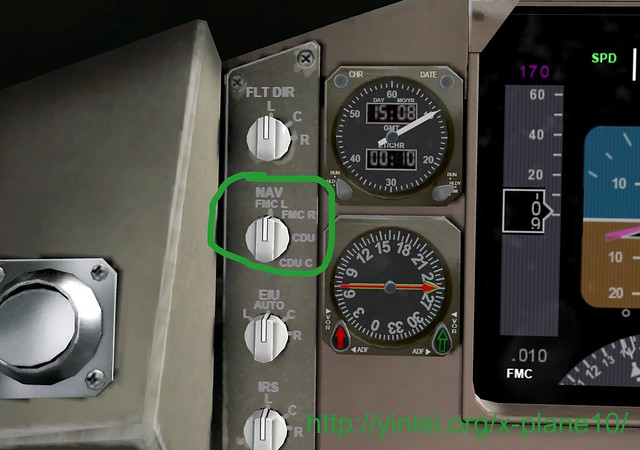
ナビゲーションモード (NAV): FMC L、すなわち左側のフライトコンピュータを選択
下図の通りです。

3 地上滑走
周波数を羽田地上管制GND 118.22MHzに合わせ、タクシー許可をRequest Taxiで要求します。
許可を得た後復唱し、地上の矢印に従って滑走を開始します。
Bキーまたは画面上のPARK BRAKEレバーでブレーキを解除し、スロットルコンビネーションまたはF2キーで少しスロットルを開けると、
機体はゆっくりと動き出します。ND左上のGS対地速度を確認して20ノットを超えないように注意してください。
同時にフラップを10度まで下げます。

#延伸阅读: <a href=<a href="/blog/ja/2012/07/ja-airline_pilot_24-taxi.html<a href=>“エアラインパイロット探秘 Airline Pilot 2.4 地上滑走ルート Taxi <a href=<a href="/blog/ja/2012/07/ja-airline_pilot_25-taxi.html<a href=>“エアラインパイロット探秘 Airline Pilot 2.5 地上滑走時の操作 Taxi
4 離陸
滑走路入り口まで滑走すると、ATC地上管制は自動的に塔台への移管を促してくるので、Contact Tower on 118.20または126.90MHzに周波数を調整し、
再びEnterキーを押してATCメニューを起動し、checkinを選択して離陸許可を待ちます。
許可通知You’re cleared for takeoffを受け取ったら下図のようになります。

機体を滑走路の中央線上で停止させ、以下の操作を行います:
オートパイロットの針路HDGを滑走路方向に設定(例えば滑走路34Rを使用する場合、340に設定できます)
フラップ位置が10度下がっていることを確認
トランスポンダーモードをTA/RAに設定(squawk番号4701の下のノブ)
.png) 無線COM1のスタンバイ周波数をコントロール区調(135.95)に設定
ETタイマーを起動
次にスロットルを開け、EICASのN1が70%に達したらブレーキを解除し、スロットルをN1 96%まで開け続け、PFDで速度が150ノット(Vr)に達したのを見て機首を上げます。
速度が160ノット(V2)に達したら着陸装置を格納します。
無線COM1のスタンバイ周波数をコントロール区調(135.95)に設定
ETタイマーを起動
次にスロットルを開け、EICASのN1が70%に達したらブレーキを解除し、スロットルをN1 96%まで開け続け、PFDで速度が150ノット(Vr)に達したのを見て機首を上げます。
速度が160ノット(V2)に達したら着陸装置を格納します。
#延伸阅读: <a href=<a href="/blog/ja/2013/06/post-17.html<a href=>“各種速度 <a href=<a href="/blog/ja/2012/07/ja-airline_pilot_32.html<a href=>“エアラインパイロット探秘 Airline Pilot 3.2 離陸滑走
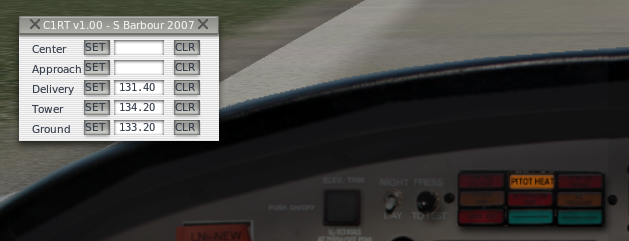
忙しく飛行操作をしている最中に、航空交通管制のために頻繁に周波数を変更しなければならないのは煩わしいと思うでしょう。
ここで<a href=<a href="/blog/ja/2011/12/-com1radiotuner.html<a href=>“便利なアドオン、COM1RadioTunerを紹介します。
これを使えば、飛行前に必要な周波数を登録しておくだけで、使用時にボタンを押すだけで済みます。
5 オートパイロットの起動
高度が500フィートに達したら、Pキーを押して一時停止し、HDGを動かしてND上のピンク色の点線を最初のウェイポイントに移動させ、 オートパイロットを起動し、CMDキーを押し、再びPキーを押して一時停止を解除すると、機体は旋回を始めます。 次に速度IAS/MACHを200ノットに設定して加速し、速度が190ノットに達したらフラップを5度まで戻し、少しスロットルを絞ってN1を90%にします。 離陸推力から上昇推力への移行は3分以内に完了する必要があるので、ETに注意してください。
これらの操作を行っている間、管制は必ずあなたを区調に移管するので、手が回らない時でも周波数の調整を忘れないでください
(先ほどスタンバイに設定済みなので⇔キーを押すだけで活性化できます)そしてCheckinしてください。
 また、高度計Altimeterも正しく設定してください。
また、高度計Altimeterも正しく設定してください。
高度が3000フィートに達したら速度を250ノットに設定し、210ノット(Vfr1)に達したらフラップを1度に調整し、230ノット後は完全に格納します。
FMCのウェイポイントに到達したか航路を確認します。問題がなければ機体の航路もFMCに管理させることができます。 CDU画面で最初のウェイポイントが表示されていることを確認し、EXECキーを押すと、ND上の赤色の航路が直線に変わり、 PFD左下のナビゲーションモードがFMCと表示されるので、オートパイロットの水平ナビゲーションLNAVキーをオンにします。 この時、PFD上方の緑色のLNAVが点灯し、機体は赤い線に沿って自動飛行を開始します。 これでようやく一息つけます。
#延伸阅读: <a href=<a href="/blog/ja/2012/08/ja-airline_pilot_34-gear-up.html<a href=>“エアラインパイロット探秘 Airline Pilot 3.4 引き込み GEAR UP <a href=<a href="/blog/ja/2012/08/ja-airline_pilot_35.html<a href=>“エアラインパイロット探秘 Airline Pilot 3.5 オートパイロットモードの起動
下図は第4ナビゲーションポイントSYEへ向かう時のスクリーンショットで、ND上で機体が航路に沿って自動飛行していることがわかります。
ND右上の白い「FMC」文字は、機体がFMCフライトマネジメントコンピュータの制御下にあることを示しています。
<a href=-thumb-640x704.png)
6000フィートに上昇した後、着陸灯とRWY Turnoff灯を消すのを忘れないでください。
10000フィートに上昇したら速度を300ノットに設定し、14000フィートに到達したらBAROノブの中央のSTDを押します。つまり高度計を標準大気圧(29.92)に設定します。 この高度値は各国で規定が異なりますが、日本では14000フィートです。
また高度が上がるにつれて空気が薄くなり、エンジンの動力も低下するため、1万フィート上昇するごとにN1を約2%上げる必要があります。 ただし97%を超えないようにしてください。現実の機体は自動的にスロットルを調整しますが、X-Planeでは手動で調整する必要があります。 高度が3万フィートを超えたら、PFD左下の灰色で表示されるマッハ数に注意してください。高高度では音速が低下するため、 同じ速度でもマッハ数が高くなり、0.82を超えると衝撃波が発生して機体に影響を及ぼす可能性があります。 この場合、オートパイロットの速度設定SPDキーを一度解除し、IAS/MACHの下の黒いSELキーを押してから再びSPDを起動します。 こうすれば速度表示はマッハモードに変わり、速度を082に再設定できます。
巡航高度の33000フィート付近に到達すると、FLCHモードは解除され上昇速度は徐々に低下しますが、現在のスロットルでは機体は加速し続けます。 この時、オートスロットルを設定することができます。速度を085に設定してTHRキーを押すと、最適巡航速度(マッハ0.85)でのスロットル自動調整モードに入ります。 巡航高度に到達すると、PFD上方のALT表示が緑色に変わります(上昇中は白色表示です)。
下図は巡航モード時のPFD表示のスクリーンショットで、中央上方のモード表示にある「オートスロットルTHR」、「水平ナビゲーションLNAV」、「高度維持ALT」などの各モードが正常に表示されていることがわかります。PFD中央の姿勢指示器内のピンク色のFD表示も黒い機体シンボルと重なっており、機体の姿勢もFMCで設定されたものと完全に一致していることを示しています。 忙しくスクリーンショットを撮った時には気づきませんでしたが、下図をよく見るとマッハ数が0.844にも達しています。飛行時には0.82を超えないようにしてください。 <a href=<a href=“2012/08/17/%E3%82%B9%E3%82%AF%E3%83%AA%E3%83%BC%E3%83%B3%E3%82%B7%E3%83%A7%E3%83%83%E3%83%88%EF%BC%882012-08-17%2023.57.05%EF%BC%89.html<a href=>” onclick=“window.open(‘https://yinlei.org/x