Introduction au système de guidage visuel d'amarrage (Visual Docking Guidance System)
Système de guidage visuel d’amarrage pour aéronefs
Comme tout le monde le sait, après l’atterrissage, les avions stationnent soit à la passerelle (pont embarquant), soit ils nécessitent un signaleur au sol pour estimer visuellement la distance et guider le pilote en tenant un panneau jaune ; soit on utilise un système de guidage visuel d’amarrage (Visual Docking Guidance System), où le pilote contrôle le roulage de l’avion vers la position de stationnement en suivant les indications d’un écran situé devant lui.

Récemment, j’ai vu la description du système de l’aéroport de Haneda, que j’ai trouvée assez intéressante, alors j’ai pris quelques notes simples.
Le système de guidage visuel d’amarrage est composé d’un écran et d’un scanner laser qui mesure la distance de l’avion. Le système est capable de détecter et d’analyser le modèle de l’avion, d’utiliser le laser pour suivre la position de l’avion, et d’afficher les résultats sur l’écran.
Les informations affichées sur l’écran comprennent principalement :
- Le type d’avion
- Les informations sur la déviation par rapport à la ligne de guidage centrale
- La distance par rapport à la position de stationnement
Lorsque le personnel au sol a terminé la saisie et la vérification des informations sur le type d’avion via le panneau de commande manuel, le système démarre l’auto-test et commence à scanner en continu.
Lorsqu’aucun avion approchant n’a été détecté, la partie supérieure de l’écran affiche les informations sur le type d’avion, et la partie inférieure affiche une flèche jaune se déplaçant vers le haut, comme le montre la Figure 1 ci-dessous.
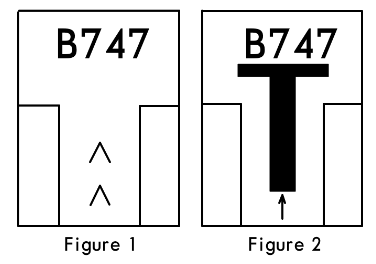
Lorsque le pilote roule vers la porte d’embarquement, ce signal lui indique que le système est activé et attend son avion. Le pilote commence alors à manœuvrer l’avion pour terminer l’opération de roulage.
Lorsque le laser détecte un avion en approche, le système commence à afficher un repère en forme de T au milieu de l’écran, avec une petite flèche pointant vers le haut sous le T, comme montré dans la Figure 2 ci-dessus.
Lorsque l’avion se trouve à 12 mètres de la position d’arrêt, le système commence à vérifier si le modèle de l’avion correspond à celui saisi précédemment. Si les informations correspondent, le système continue le guidage.
Cependant, si le système détecte une inadéquation des informations, la partie supérieure de l’écran affichera alternativement le message d’erreur « STOP-ID-FAIL », tandis que deux carrés rouges d’avertissement s’afficheront au milieu de l’écran.
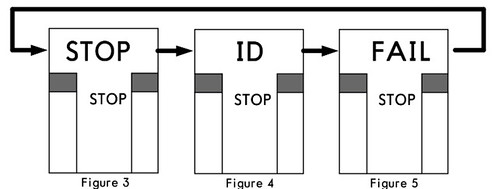
Après avoir vu ce message, le pilote doit immédiatement arrêter l’avion.
Si le système détecte que la vitesse de roulage de l’avion est trop élevée, l’écran affichera le mot « SLOW »,

rappelant au pilote de réduire la vitesse pour empêcher l’avion de dépasser la position de stationnement.
Si le système détecte que l’avion dévie de la ligne de guidage centrale, une petite flèche jaune vers le haut s’affichera à gauche ou à droite sous le T sur l’écran, indiquant que la position actuelle de l’avion dévie vers la gauche ou la droite par rapport à la ligne centrale. Dans le même temps, un curseur rouge clignotant s’affiche également dans la partie supérieure de l’écran, pointant vers la droite ou la gauche, rappelant au pilote qu’il doit ajuster sa Route vers la droite ou vers la gauche.
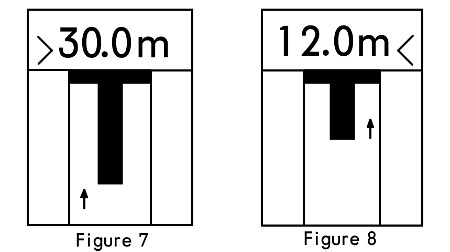
Lorsque l’avion se trouve à moins de 30 mètres de la position de stationnement, l’écran commence à afficher la distance. Chaque mètre rapprochant, les données sont mises à jour en mètres, comme 30,0 m, 7,0 m, etc. Lorsque l’avion est à moins de 2 mètres de la position de stationnement, les chiffres sur l’écran sont mis à jour par incréments de 0,2 mètre.
Lorsque l’avion se trouve à moins de 16 mètres de la position de stationnement, la longueur de la barre verticale du repère en T sur l’écran commence également à raccourcir continuellement. Cet affichage représente non seulement de manière imagée la distance par rapport au point d’arrêt, mais permet également de voir le taux de rapprochement, aidant ainsi le pilote à mieux contrôler la vitesse de roulage. Le taux de variation de la longueur de la barre verticale est d’une graduation réduite pour chaque 0,5 mètre de rapprochement.
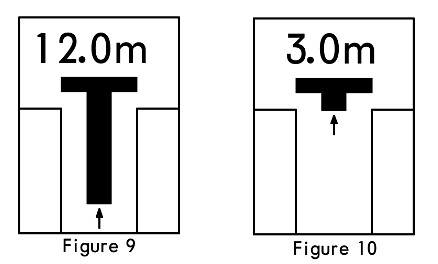
Lorsque l’avion atteint la position de stationnement, le mot « STOP » s’affiche sur l’écran, et deux carrés rouges apparaissent de part et d’autre du centre, comme le montre la figure ci-dessous.

Lorsque l’avion est correctement stationné sur le poste, le mot « OK » s’affiche sur l’écran et persiste pendant quelques secondes, comme le montre la Figure 12 ci-dessous.
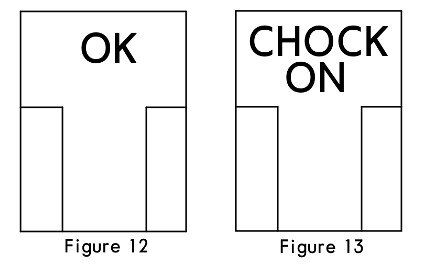
Lorsque le personnel au sol a installé les goupilles de verrouillage du train d’atterrissage et a enclenché le commutateur « CHOCK ON » du système, le mot « CHOCK ON » s’affiche également sur l’écran pour informer le pilote que cette opération est terminée, comme le montre la Figure 13 ci-dessous.
Ceci conclut l’ensemble du processus de guidage.
Si l’avion s’arrête au-delà de la position correcte, le système affichera le message « TOO FAR »,

Voici maintenant d’autres messages d’erreur du système.
Outre les messages tels que STOP, FAIL, etc., si le système affiche le mot « WAIT », le pilote doit également arrêter immédiatement le roulage de l’avion et attendre la prochaine instruction.
En cas de mauvaises conditions météorologiques telles que du brouillard épais, de la pluie ou de la neige, la visibilité du système de guidage visuel peut être affectée. Dans ce cas, le système affichera temporairement le mot « SLOW ». Le pilote doit également veiller à ce que l’avion ne roule pas au-delà de la position de la passerelle et attendre que le système ait à nouveau détecté l’avion et affiché le repère en T avant de continuer l’opération.
Si le système tombe en panne et ne fonctionne pas normalement, l’écran devient noir et n’affiche que deux carrés rouges de chaque côté du centre.
En résumé, le système de guidage visuel d’amarrage pour aéronefs permet non seulement d’alléger la charge de travail du personnel au sol, mais les services de gestion de l’exploitation aéroportuaire peuvent également utiliser le système pour calculer le temps d’occupation de chaque poste, organiser plus de décollages et d’atterrissages, et améliorer le niveau d’équipement de l’ensemble de l’aéroport. Par conséquent, l’utilisation de ce système permet d’améliorer efficacement le taux d’utilisation des ressources des postes de stationnement, de réduire les retards de vol, d’éviter les erreurs de guidage humain, d’économiser efficacement les coûts d’exploitation et d’améliorer globalement le niveau de gestion du tarmac de l’aéroport.
Fin