本站还是和波音737-500比较有缘的,
因为很久以前写的一个长篇系列"客机驾驶探秘--- 飞行员是如何驾驶民航客机的"
就是以波音737-500的飞行手册为例编写的。
现在波音737NG系列基本大部分取代了737 Classic(737-300,737-400,737-500)系列,
再看737-500的驾驶舱已经有种很古老的感觉。
于机场里也很难再看到它的身影,
比如全日空从1995年7月引入该机型(只有一个经济舱共126席),
并使用了"超级海豚"特殊涂装,
最多时曾经拥有25架机体,但现在只有4架了。
明年全日空决定将所有"超级海豚"退役,
ボーイング737-500型機 「スーパードルフィン」の退役に向けて
并开始举办一些纪念活动,
ANA、福岡で737-500感謝祭 20年春退役前に家族連れでにぎわう
你如果有机会看到它的话可千万不要错过拍摄机会。
根据个人经验,一般来说在大阪伊丹机场,福冈机场,名古屋中部机场看到它的机会比较高。
ANA Wings Boeing 737-54K JA303K 名古屋中部机场

上次网友问起冷舱启动的问题,
想起来以前测试VMAX-777-Pro Boeing 777 Worldliner Professional时有些拷屏,
那么就结合插件中提供的777 Pilot's Handbook操作手册做一个小小的攻略。
这个手册是波音公司授权给软件开发商的,其权威性不容置疑。
首先看一下这个777的插件的主菜单,加燃油的操作在这里完成。

下面按照手册里的Normal Prececure来进行启动操作,
具体请看手册,自己拷屏的步骤并不很完整。
Preflight Procedure - First Officer
顶板检查,从左至右,从上往下
Overhead maintenance panel ...................Check
Verify:
• all guards closed
• flight control VALVE CLOSED lights extinguished.
一般来说短程的国内航线时的巡航高度基本是不变的,就如前几节介绍的一样,进入巡航以后一直到开始下降和降落,除非有恶劣天气或者某些紧急情况,飞机会一直保持这个高度的。但是对于远程越洋的国际路线,往往会采用Step Up Cruise,即逐渐升高巡航高度的方式,让我们结合一个波音777-300ER从东京到纽约的航班实例,看看如如何安排高度的。
考虑到燃油经济性的问题,飞机在高高度上比底高度时更加省油。但是在飞远程路线时,加的油要比短程时多很多,如果在大重量的情况下费劲地一次性地以高迎角爬升到巡航高度,反而燃油经济性会下降。在某个重量下飞机都有一个最合适的高度指标,随着燃油的消耗飞机重量不断下降,按照该重量时的高度指标,飞机逐步的提高高度,以获得最好的经济型。
在巡航阶段,尽管飞机上的自动驾驶仪器已经非常先进,飞行员可以不用直接进行操纵,
但是并不说明飞行员可以闲着,他们要不断扫描各种仪表,检查各种飞行数据,并时不时记录下来,还是很繁忙的。
下面就分几节对飞行数据方面的信息做个简单总结。
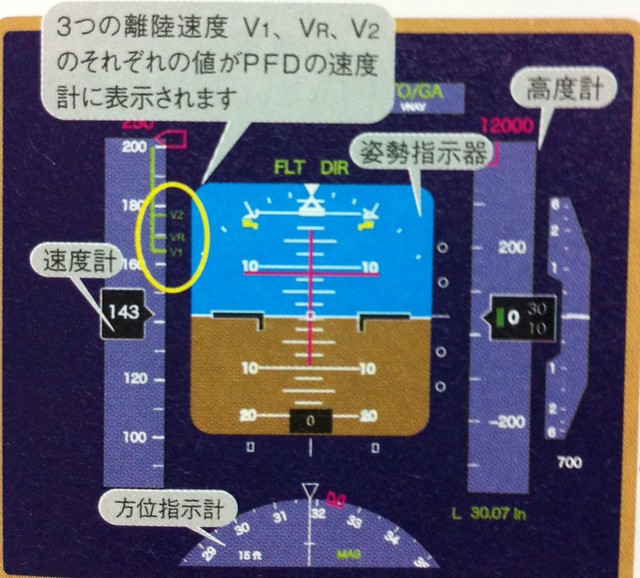
首先看看速度方面。
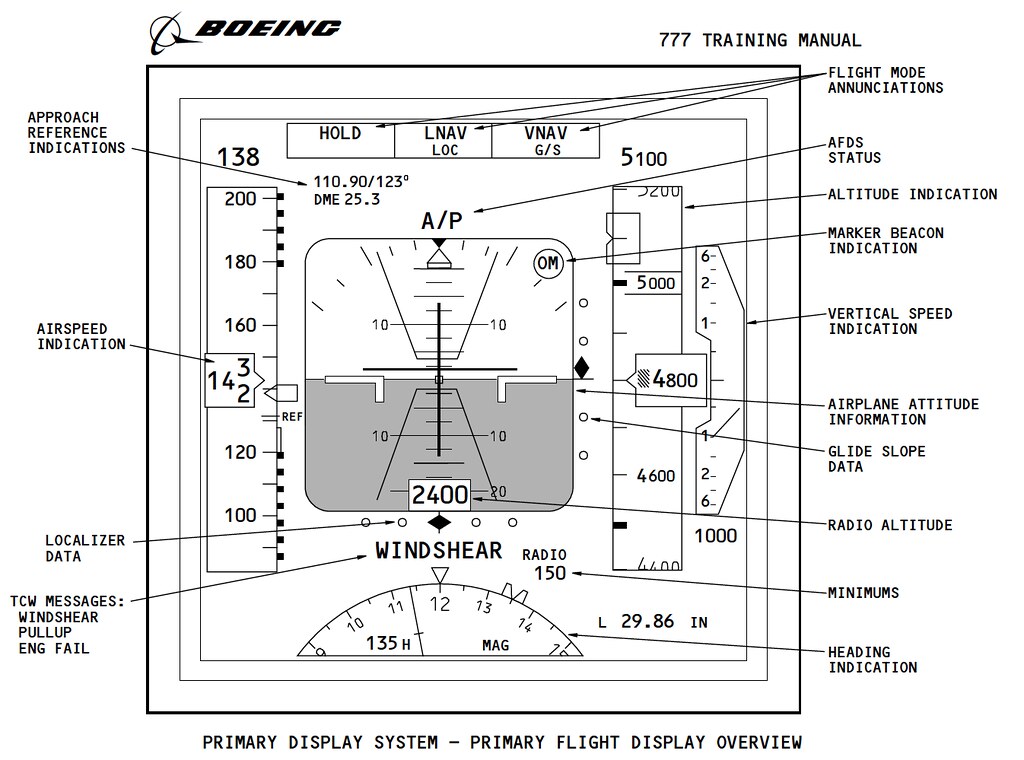
第一个是IAS 指示空速(Indicated Airspeed),这个数字显示在PFD中的左侧速度条的中央方框内,
如下图中波音777训练手册中所示,在AIRSPEED INDICATION箭头所指处的数字即为IAS,
显示出当前速度为142.5节。
进入巡航阶段以后,飞行员们可以稍微松口气,放松一下起飞以来紧张的神经。
客舱乘务员也会为驾驶舱提供咖啡等饮料服务,毕竟飞机内空气干燥,飞行员需要时不时补充水分的。
趁他们休息时那么让我们稍稍也停下,回过头来看看从起飞起这一路的行程吧。
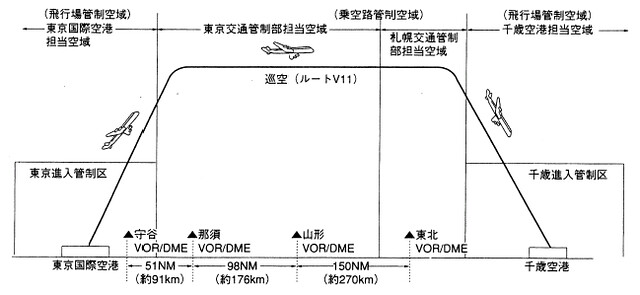
以JAS115航班为例,首先看一下航路图和导航日志NAVIGATION LOG,
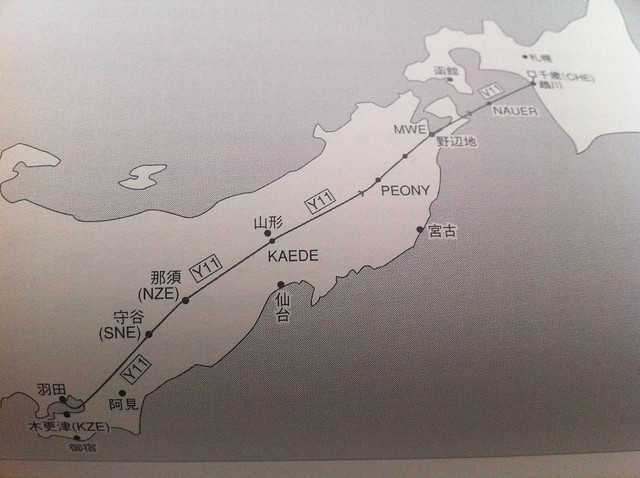
飞机选择的导航航路为标准离场程序SID,木更津KZE导航站,守谷SNE导航站,NZE那须导航站,
山形KAEDE航路点,PEONY航路点,野边地MWE航路点,海上的NAUER航路点,以及北海道的千岁CHE导航站。
飞机基本上沿着Y11航路飞行,从起飞到到达守谷SNE导航站大约累计飞行50英里,
而飞行上升到巡航阶段的那须NZE导航站时累计飞行约100英里(160公里),高度达到40000英尺(12000米),飞行所需时间大约16分钟,如下图所示。
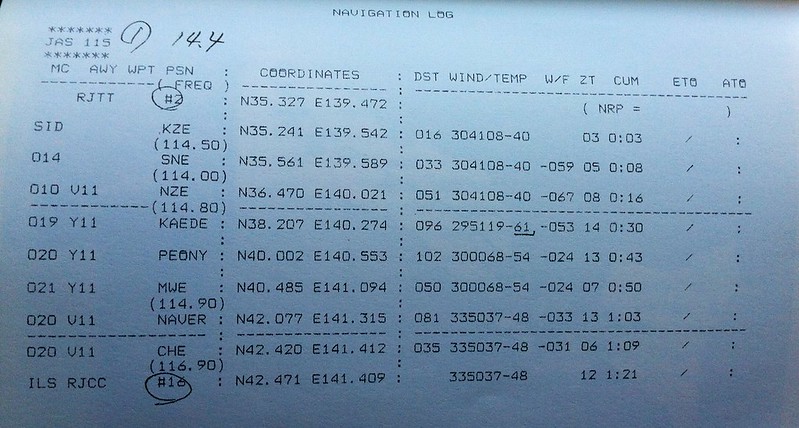
这时飞机离开了东京北关东区域管理中心,开始进入东北区域,以波音777-200的Air System 115航班为例,
起飞离地后经过16分钟,飞机此时到达了栃木県的那須地区,经过NZE VOR导航台,
高度达到了39000英尺。
从上图可以看到,飞机从守谷SNE导航台处开始进入到R-NAV(区域导航,Area navigation)的 Y11航路,
并将沿该航路一路向北,一直延续到北海道的千岁导航台。
这时ATC又从空管接到新的联系,开始进行区域间移交:
"Air System 115,Contact Tokyo 118.9"
意思是
"Air System 115航班,请联系东京东北区域,频率为118.9",
飞行员复诵道
"Tokyo Control 118.9,Air System 115"
意思是
"收到,联系东京区域118.9,Air System 115航班"
首先再次以东京羽田机场到北海道扎幌新千岁机场的AirSystem115航班为例,
看一下本次航班从出发起飞到巡航降落所需要的空中交通管制流程:
1 羽田机场:
放行管制Delivery-地面管制Ground-塔台管制Tower-离场管制Departure
2 区域管制:
东京区域管制区Tokyo Control-扎幌区域管制区Sapporo Control
3 新千岁机场:
进场管制Approach-塔台管制Tower-地面管制Ground
飞机在机场管制和区域管制之间不断被移交给不同的单位,如同接力一样保证在每一段区域中的飞行安全,如下面两图所示。
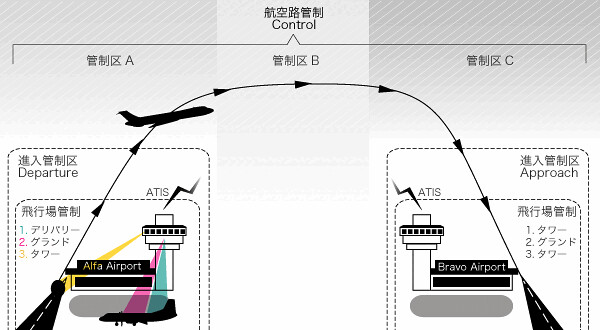
左边为出发机场内管制的放行,地面,塔台,离场管制
右边为达到机场内管制的进近,塔台,地面管制
飞机的飞行高度和所在区域管制的示意图
下面是日本的区域管制区的部分介绍,可以看到实际上每个管制区下面又分为几个小的管制区sector,
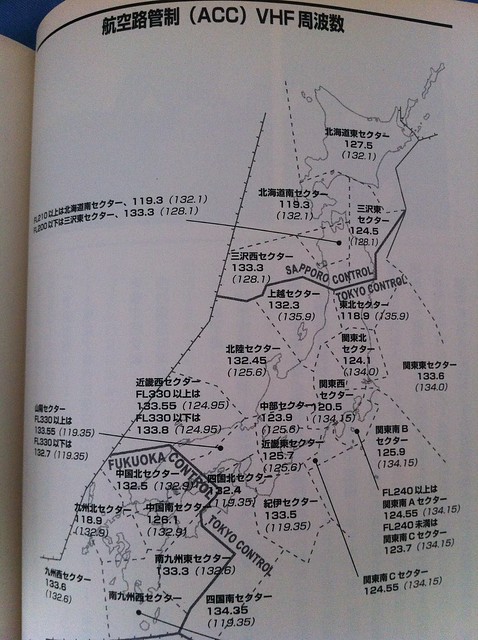
比如本次航班要经过东京管制区内的关东西区,关东北区和东北区,
以及扎幌管制区内的三泽东区和北海道东区,一共5个sector的接力才能最后达到扎幌机场的管制区。
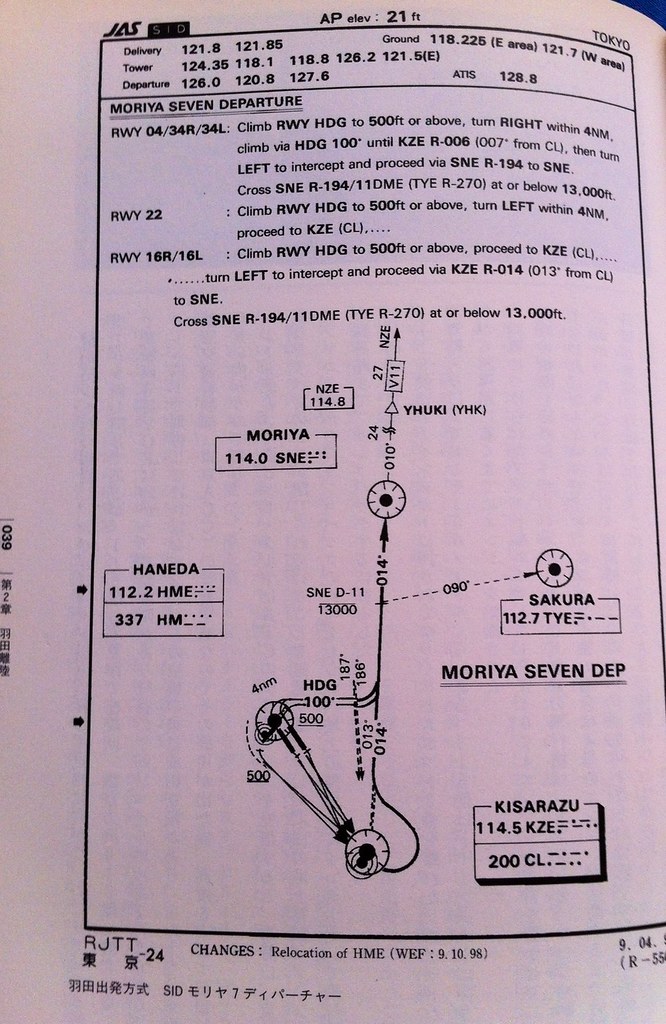
以AirSystem115航班为例,飞机按照羽田机场Moriya7号离场程序,先沿着跑道(16R)方向飞行到图右下角的KZE(KISARAZU木更津)导航点后,自动向左压坡度30度,拐弯以14度方向(基本接近与正北方向)向SNE(MORIYA守谷)导航点飞行。
此时塔台管制员确认飞机出发无误以后,指示飞行员联系出发管制:
"Air System 115,Contact Departure"
意思是
"Air System 115,请联系东京离场管制"
副驾驶复诵道
"Departure,Air System 115"
即
"联系东京离场管制,Air System 115"
后,把电台通信频率调至离场管制120.800MHz,并联系道:
"Tokyo Departure,Air System 115,Leaving 1800"
意思是
"东京离场管制,这里是Air System 115,通过1800英尺"
管制员回答道
"Air System 115,Tokyo Departure,Rader Contact,Turn Left Heading 020, Vector to Moriya, Climb and Maintain 210"
意思是说
"Air System 115,这里是东京离场管制,雷达看到,左转航向020,雷达引导到Moriya,上升并保持21000英尺"
副驾驶复诵:
"Left 020,Direct 210,Air System 115"
即
"左转航向020,保持21000英尺,Air System 115"。
飞机继续不断上升,无线电高度计上的数字超过了400英尺(以客机驾驶手册一书中737-500为例),
这时可以打开水平导航LNAV模式了,机长指示副驾驶按下MCP上的LNAV按钮,

于是PFD上的左上方模式栏里方位设定由HDG SEL变为LNAV,飞行模式进入下图中的第5阶段。
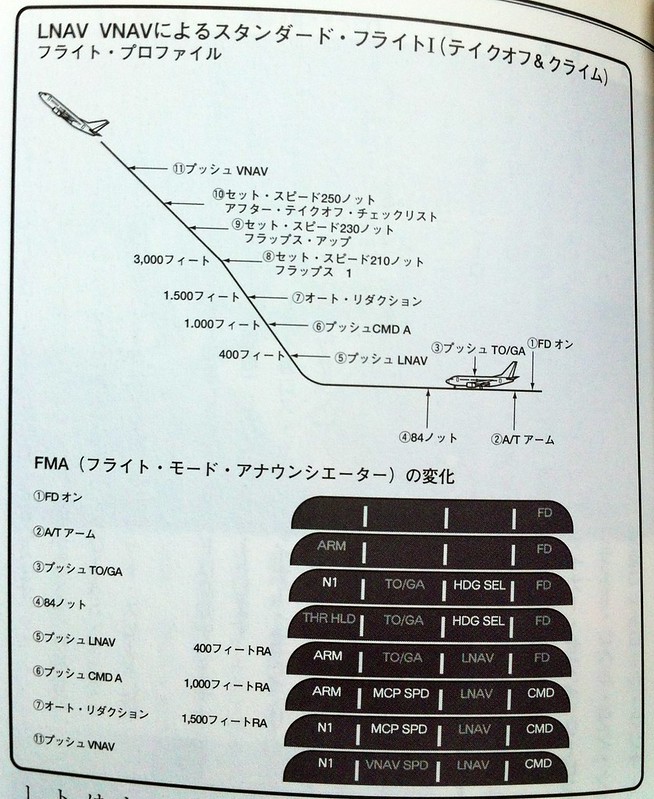
LNAV 是Lateral navigation 的简称,即水平导航,可以控制飞机按照事先设定好的航路在水平面上自动飞行。
LNAV的原理首先是利用惯性导航装置IRS,即使用飞机上的激光陀螺,根据多普勒效应得到飞机的加速度,
对时间积分后可以计算出飞机当前的速度和位置,再根据地面上的无线电导航设备(VOR,DME,ILS/DME,VORTAC,TACAN等)或者GPS得到的位置数据,
飞行管理计算机FMC把所有这些数据连续的合成起来,也就是FMC把IRS的误差通过各种导航设备的数据不断进行修正,正确控制飞机在应有的航线上飞行。
MCP上LNAV键被按下后,PFD上的飞行指令条FD就会根据FMC的指示,按照事先设好的航路对飞行员进行导航。
飞行员只要按照FD操纵飞机,即使有侧风飞机也不会偏离航线。
这是因为FMC会根据天气计算出风向修正角WCA(Wind Correction Angle),WCA也会被集成到飞行指令条FD上,所以飞行员驾驶时只要专注于FD就可以了。
下面继续以客机驾驶手册一书中的波音737-500操作手册为基础介绍飞机离地后的操作。
上一节提到机长要双脚离开脚舵只使用操纵杠或者操纵盘还控制飞机俯仰和横滚姿态。
也许你会问,左右滚转时发生的反向偏航(adverse yaw)不是得用脚舵来控制的嘛?
控制方向舵让转弯指示器的小球对中,call the ball不是很重要嘛?
关于反向偏航,当向左移动驾驶杆使航空器向左压坡度时,右侧副翼是向下的,
使右侧机翼的升力增加,因此右侧机翼的诱导阻力也增加。
其结果导致航空器向右偏航,与副翼操纵所要达到的机头偏航方向正好相反,
这种情况被称为反向偏航。
这样当向左移动驾驶杆使航空器向左压坡度时就会导致机头有向右的偏转。
这时就需要驾驶员操纵方向舵来抵消反向偏航的影响。
当飞机速度不断增加,PFD中左侧的速度条中会出现一个叫speed trend vector的绿色箭头,

它表示现在飞机速度的加速度,箭头向上表明飞机处于加速状态,向下表明处于减速状态,
箭头指向的速度为10秒以后的飞机速度预测值。
飞行员通过观察speed trend vector就能知道今后飞机的速度趋向,这尤其在起飞和降落阶段对驾驶非常有帮助。
飞机速度超过45节以后,可以看到speed trend箭头快速上升,飞机速度越来越快,
加速度在速度达到V1时达到最大值。
由于飞机处于FD(Flight Director)模式,在PFD中央自己飞机的标示上方会出现一个紫色FD指令条,
指示按照航路为了达到设定好的速度高度和航向,飞行计算机计算出当前飞机应该所处于的姿态。
飞行员应该按照FD指令条的显示,控制操纵舵或者手柄来抬机头压机头或者左右盘旋,使飞机去对准指令条,飞机就会忠实按飞行计划航行。
下图为波音737的PFD显示器示意图,紫色类似倒写的V字的那个标示就是FD指令条(flight director command bar),下面白色的倒V字型标示代表自己飞机,在下图中飞机需要执行拉起+8度抬头的操作。

而空中客车的显示如下所示,Flight Path Director (FPD)线是计算机所给出的指令,Flight Path Vector (FPV)表明飞机处于的方位,飞行员要控制飞机使FPV处于FPD的中心。

是不是也许你会觉得驾驶飞机有点象玩电子游戏?当然事情没有那么简单。由于各种传感器或者系统的故障,计算机有可能会给出错误的指令,所以飞行员一定要时刻监视各种仪表,注意检查计算机发出的指令是否正确,而不能不加分析的盲目执行计算机的指令。
一般来说飞机有3种起飞方式,这里简单介绍一下。
Normal Takeoff Method 通常起飞方式
飞机停在跑道上,机头正对中央线,在刹车的状态下把推力阀向前推至N1 40%的位置,完成确认发动机的安定运转后送开刹车,飞机开始滑行,当飞机时速达到60节后把推力设到起飞推力。
这种方式主要用在有侧风/潮湿跑道/积有冰雪的打滑跑道等情况下,因为此时特别要注意维持机头方位的稳定,所以准备好正对跑道后再加推力的方法利于保持方向。
另外飞机性能指标中的起飞滑跑距离也是指的这种起飞方式时的数据。
Rolling Takeoff Method 连续起飞方式
飞机转弯上跑道以后不停下来,或者即使停下来也不松开刹车,推力阀向前推至N1 40%的位置,完成确认发动机的安定运转后,当飞机时速达到60节后把推力设到起飞推力。
这个方式的优点是能缩短滑跑时间,同时飞机的移动速度变化比较平稳,乘客的不适感比较少。但要注意的是在侧风或者潮湿/打滑跑道条件下这种起飞方式不太适合。
另外这种方式使用跑道距离会比较长,以及在一些特殊条件下需要更慎重操作维持机头方位操作(比如每个发动机的加速性能不一致而使达到安定状态需要较长时间,或者跑道路面比较滑等),对飞行员的要求也更高。
飞机在滑行过程中,副驾驶把通信频率调到塔台波段,联系塔台管制员:
"Tokyo Tower, Air System 115, with you"
意思是:
"东京羽田塔台,这里是Air System 115航班",
塔台管制员回答道:
"Air System 115, Tokyo Tower, Number 2"
即
"Air System 115航班,东京羽田塔台,你是第二个起飞"
于是副驾驶复诵道
"Number 2"。
客舱内乘务员们确认好乘客都已经做好了起飞准备,通过机内系统通知飞行员,驾驶舱内能听到乒的提醒声,飞行员头顶仪表板上的CALL灯会亮起。
当飞机逐渐接近道跑道口时,管制员会发出指示:
"Air System 115,Taxi to Holding Position,Runway 16R"
意思是说
"Air System 115航班,请滑行到16R跑道口外并等待(也就是没有管制的许可绝不能进入跑道)"
于是副驾驶复诵
"Taxi to Holding Position, Runway 16R,Air System 115"
也就是
"滑到16R跑道外等待,Air System 115"
上一节中介绍了飞机在滑行之前要预先把襟翼放到起飞位置,这是为什么呢?
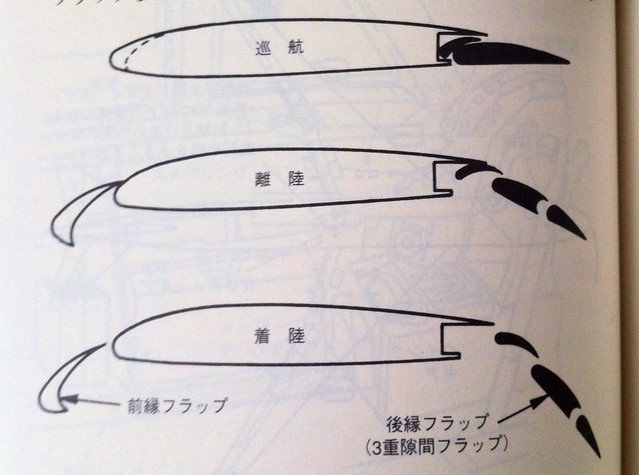
首先襟翼是装在机翼后缘或前缘,可向下偏转或(和)向后(前)滑动,用以增加升力的翼面形装置。依据所安装部位和具体作用的不同,襟翼可分为后缘襟翼、前缘襟翼。
一般来说后缘襟翼有一个缺点,就是当它向下偏转时,虽然能够增大上翼面气流的流速,从而增大升力系数,但同时也使得机翼前缘处气流的局部迎角增大,当飞机以大迎角飞行时,容易导致机翼前缘上部发生局部的气流分离,使飞机的性能变坏。如果此时采用前缘襟翼,不但可以消除机翼前缘上部的局部气流分离,改善后缘襟翼的增升效果,而且其本身也具有增升作用。
据说以往襟翼的设置是在滑行中设定的,但是滑行中飞行员既要和管制通信,还要注意四面的交通,非常之忙碌而往往会忘记设定襟翼,所以现在的飞行手册上都规定在开始滑行之前要设定好襟翼了。
襟翼的使用主要在起飞和降落时,乘坐飞机时乘客经常会注意到能听到"嗡-"的机械动作声,一般来说这就是襟翼从机翼中伸出时的声音。
如上图所示,平时巡航和在地面停留时,襟翼是收缩在机翼里的,只有在起飞和降落需要的时候才伸出来。而相对起飞降落时飞机的速度更慢,此时需要的升力也就更大,所以襟翼伸出的角度也更深。
下面介绍飞行在地面上滑行时的一些操作,涉及到飞机的转弯和飞行操纵面检查。
飞机在地面上转弯时要同时使用脚舵rudder和转向手轮tiller,控制装置通过液压系统控制飞机的前轮转向,一些大型飞机如波音747/777,空中客车380的后轮也有转向装置。
在飞行前程序一节中曾经介绍过脚舵是用来操纵垂直尾翼上的方向舵,以使飞机在空中转弯,其实它同时也能控制前轮转动,所以在地面上踩脚舵就同样可以使飞机转弯了。但是脚舵控制只能使飞机以很小的角度缓慢转弯,也就是只能转个很大的弯,实际上在机场里经常需要飞机做90度的转弯,这时只靠脚舵就远远不够了,必须要使用转向手轮。
转向手轮tiller位于驾驶舵的外侧,是一个黑色的可以旋转的手柄,如下图所示,

(这是波音737-800型飞机的照片,感谢百度贴吧berqiang先生的提供,出自于这里。
空客的手轮样子不太一样,但我手头没有好的照片)
飞行员旋转它可以让飞机做60-80度的急转弯,因此即使在狭窄的机场滑行道上,几十米宽的庞大机体还是能以几十米的转弯半径灵活的拐过一个个垂直的路口的。比如全长74米的波音777-300客机的转弯半径只有56米。注意开始使用转向手轮时一定要慢慢的转动,毕竟如客机这样的庞然大物如果突然猛打轮的话,乘客们就会感觉象坐过山车一样身体左右摇动,如果没有系好安全带的话说不好还会受伤。

飞机被推车推到停机坪的尽头,机务再次与驾驶舱通话:
机务: "驾驶舱,设置停留刹车"
机长: "刹车完毕"

于是机务人员把推车的牵引杆从前起落架移开,再次设置轮档,

推车驶离飞机。

(上图拍摄于名古屋中部国际机场)
副驾驶员监视EICAS,确认左右发动机运转安定,向机长报告后,并执行(以波音737-500为例)启动后检查单,

比如发动机防冻装置设定到自动档等,一切正常后机长再次与在地面上等待的机务通话,
机长: "地面,发动机起动完毕,可以解除通话电缆"
机务: "轮档移开,起落架安全插销拔除,电缆解除"
(起落架安全销用于防止意外收起起落架,当飞机在地面停留时都要插上,这样即使误操作收起起落架也不会损害飞机)
移开轮档后到这里地面机务人员的工作就结束了,他们离开飞机并站成一排,挥手向即将起飞的飞机致意,飞行员也会通过飞机窗口挥手向他们的辛勤工作表达谢意。

(上图拍摄于广岛国际机场)
飞行员取得放行许可,并完成出发前5分钟的准备工作(发动机起动前程序)之后,就可以向地面管制提出申请推出,比如
飞行员: "Tokyo Ground, Air System 115, request push back, spot 2, information F"
意思是,"羽天机场地面管制,这里是Air System 115航班,请求推出,桥位2号登机口,我们有通播F(Foxtrot)的信息"
机场的地面管制员接到这一无线电请求之后会检查停机坪的交通拥挤情况,如果附近没有别的飞机的移动,
或者该航班的移动不会影响其它飞机的时候会回答到:
"Air System 115, push back approved, runway 16R"
意思是,"Air System 115航班,批准推出,请使用跑道16R(Right)"
接到可以推出的命令,飞机终于可以出发了。
关于机场大屏幕上打出的每个航班的出发时间,一般人可能都认为这是飞机起飞离开地面的时刻,
其实这个时间指的是飞机离开廊桥登机口的时间,也就是飞机离开停止进入到移动状态的时间。
同样航班到达的时间也不是飞机降落到地面的时刻,而是指飞机滑行到停机位完全停止下来的时刻。
在上一节 出发前5分钟提到了交通管制员通知飞行员要使用Moriya7号离场程序,那么什么是离场程序呢?
飞机在空中飞行不是没有交通规则的,因为航空公司众多,尤其是大机场基本是几分钟就会有一架飞机起落。
与地面交通类似,如果没有一套交通规则进行管理,那么飞机运行将会及其危险。
因此在空中设定了很多线路,虽然不象地面的马路我们不能用肉眼直接看到这些路线,但是飞行员们必须要严格按照规定执行飞行任务。
其中为离场的飞机设置的路线和程序,叫做标准离场程序(Standard Instrument Departure),简称SID。
SID是一系列预先设定好的航路将飞机从起飞后一直引导到离场点。这个离场点就是飞行计划中航路的第一个导航点。或者说,标准离场程序就是将飞机引导出终端管制区(TMA/Terminal Control Area)的程序。上一节中提到的MORIYA离场程序的MORIYA就是离开羽田机场是的一个离场点,是位于茨城县的守谷的一个导航点。
飞行员在座舱里进行飞行前准备的同时,地面人员也在做着飞行准备,
比如把为飞机供电的电缆解除,加油车运货车食品车等都撤离机体,把牵引车连到前起落架等等。

食品车,本人拍于东京国际机场。


加油车,拍于东京国际机场。

运货车,拍于东京国际机场。

牵引车,拍于东京国际机场。

地面人员正在把地面电源电缆从波音777机体上解除,照片拍摄于广岛机场。
飞机旁边防碍移动的所有车辆设备都撤离以后,地面的准备工作也全部完成。
地勤机务人员在地面通过与驾驶舱连接的有线通话机通知飞行员,正式出发前5分钟到了。

(上图拍摄于名古屋中部国际机场)