在5.6节中总结了由空中管制员执行雷达引导时的对话,下面把进场和进近过程中飞行员的具体操作总结一下。
当管制发出航向指示,如"Air System 115,Turn Left Heading 040",
即要求飞机左转航向至40度方位角。
飞行员会调节模式控制面板MCP(Mode Control Panel)上的航向HEADING旋钮(参见下面波音737的MCP示意图),

把显示器内的数据拨到040处。然后把旋钮下方的HDG SEL电门按下,
此时飞行管理系统FMA模式会就会发生变化,由原来的水平导航LNAV变为航向选择HDG SEL模式。
这一变化可以参见下图的FMA(Flight mode annunciation)飞行方式信号器的状态转化图,
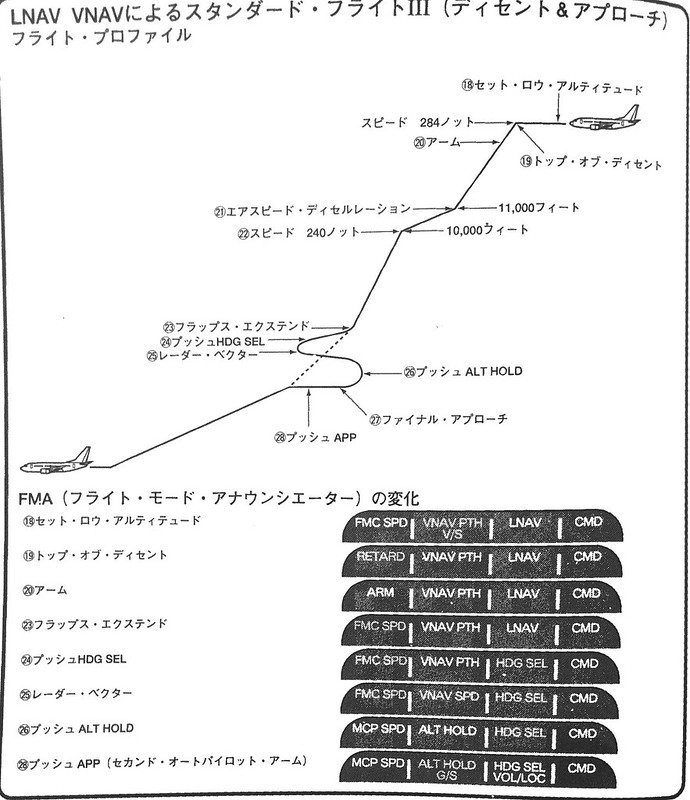
在23的飞行状态中,按下HDG SEL后,水平方向的控制就转为24的航向选择状态,
因此航向的控制就不由飞行管理计算机,而是由飞行员来亲自手动管理了。
但是要知道MCP只是管理了飞机的飞行方向,具体的转弯动作还是要靠计算机来自动控制舵面的调整,
一般来说标准的转弯需要飞机横滚30度,(不是只是动一下垂直尾翼处的方向舵啊)
利用左右副翼产生的升力差使机身左右倾斜,达到转弯的目的。
比如想左转弯时,左侧副翼向上抬起,右侧副翼放下,因此右侧机翼产生的升力就会变大,
而左侧升力变小,两侧的升力不平衡,因此飞机机体就会向左方倾斜,开始向左转弯。

当机首方向逐渐接近目的航向,计算机又会调整副翼逐渐减少倾斜度,
直至到达040度航向(北东方向)时刚好使飞机达到平飞状态。
春天是个适于旅游的季节,副作用就是造成本blog荒废了一段时间,不好意思,5月中一定要把客机驾驶探秘写完。(京都奈良福岛东京长野等地拍的照片倒也小小丰收一笔)
今天稍微飞行了一个小时左右,练习了一下盘旋高速下降和ILS降落,完成以后在地图模式上检查一下航迹,
感觉飞得还不错,就拷屏下来做个纪念。
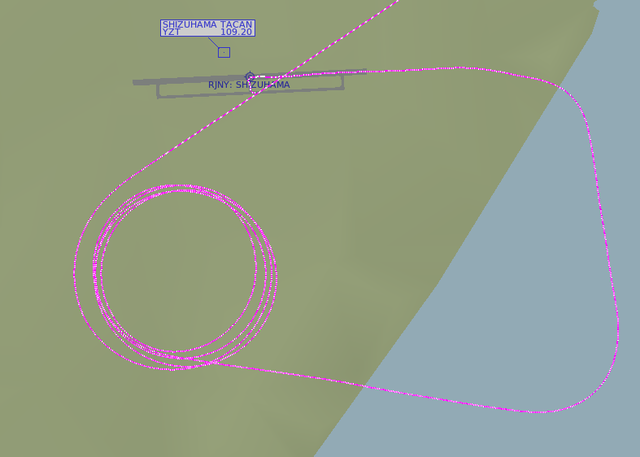
上面是做盘旋下降时的航迹,维持以bank角30度从1万多英尺处高速盘旋下降,
然后在1000英尺高度该平并进入三边,四边,最后五边降落。
看盘旋处的圆画得还算规整,小有些成就感。
在5.3节中总结标准仪表进场程序时提到,根据进场起始航路点的位置高度信息,飞行员再参考预达时间,耗油率,发动机性能,风力风向等因素,就可以设置下降过程中的发动机参数和下降率了。
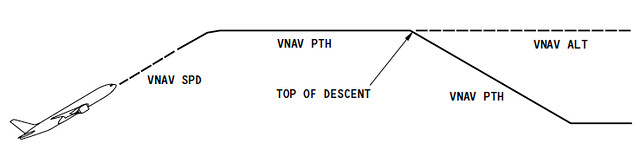
比如KAIHO进场程序起始于位于太平洋里的ADDUM航路点,最低航路高度为10000英尺,为了能够从巡航高度降到ADDUM,通过FMS飞行管理计算机的计算,飞机需要从距离ADDUM西侧200公里处的地点就需要开始下降,
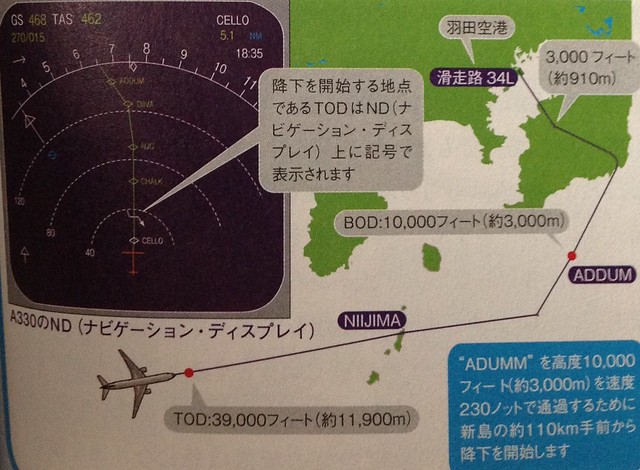
一般把这个点叫做下降顶点Top of Descent, 简称TOD或者T/D,可以在ND的地图模式里看到它的显示,如上图中的空中客车330中以一个带箭头的折线表示出来,地点位于CELLO和CHALK定位点之间。另外进场起始点被称作Bottom of Descent, 简称BOD。
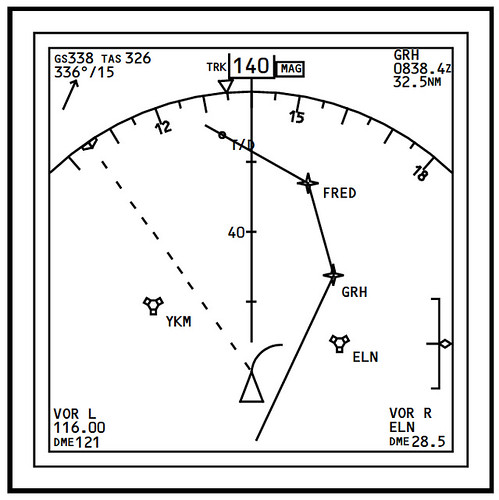
再比如在波音777的ND中,T/D的地点直接被标注出来,由航路上的一个圆点来表示。
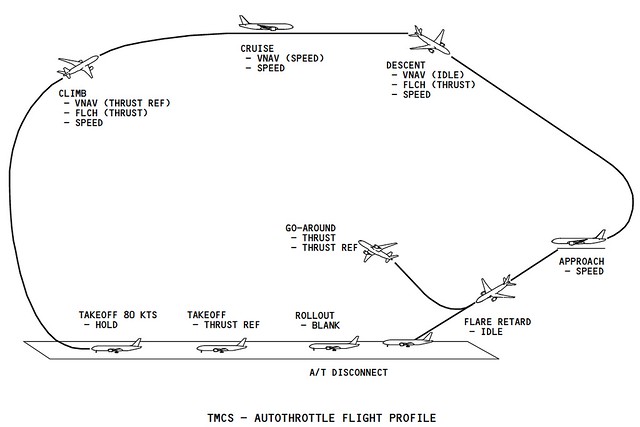
经过TOD以后,飞机就开始自动下降高度,整个航程的示意图如下所示。(这个图主要是解释每个飞行阶段时的自动油门设定模式,但用来解释整个飞行过程也挺合适,所以拿来借用一下。)
又去外地出差了一周,本着不能让博客荒废的精神,简单更新一次吧。
昨天回家后玩了会儿x-plane消遣消遣,重点练了下爬升和下降时的垂直速度。
比如在把垂直速度维持在1000英尺/分上,并在改变姿态时注意轻柔地拉推杆的两点。
在爬升和下降时,先调整好俯仰姿态,然后加大或减少发动机推力,
当垂直方向速度逐渐稳定在1000英尺/分左右后,用配平作些微调即可。
看到基本不用推拉杆,飞机就能稳稳地维持在这个速度上时,很有成就感啊。
改平时的操作基本上也是一样的,按顺序推杆或者拉杆调整俯仰角,
然后调整推力,当垂直方向速度逐渐稳定在0英尺/分后,稍作配平即可。
虽然说起来很简单,但实际操作时让飞机姿态安定下来并不是一件容易的事,
一段时间不练习后手会变生,还是需要经常复习的。
完
水平飞行 level flight, 爬升, 下降descent的基本操作之个人总结,怕今后忘了先写下再说。
为了维持稳定的水平或者爬升与下降时,一定要先调整动力,然后控制机头的姿态pitch,最后是调整配平。
第一步的动力调节之所以重要,是因为发动机推力决定了飞机上升和下降状态。
一般人印象中,飞行员拉杆使飞机上升,推杆使飞机下降,实际上这是错误的概念。
拉杆实际上确实能使飞机上升一段高度,但同时在推力不变的情况下,空速会不断减少最终使飞机进入失速。
同样如果想用推杆使飞机下降,飞机不断低头而使空速会不断增加,这将会提高飞机的升力,使高度反而升高。
所以一定要记住,为了维持一个稳定的高度调整过程,一定要调整动力。
从爬升进入平飞状态(level-off)时,首先要适当降低发动机推力;从平飞进入爬升时要提升推力;从平飞进入下降时要降低推力。
第二步调整姿态角pitch的目的既然不是高度,那是什么呢?是为了调整空速。
推杆后,飞机会低头增速;拉杆后,飞机会抬头减速。
注意这里的速度的增减是有一定范围的,如果想要大幅增速,毕竟还是需要增加发动力推力的。
第三步的配平,主要是为了减少拉杆推杆的力量,所以当动力和姿态基本稳定后,也就是高度和速度稳定以后,
适当调整配平器让飞行员不用老用力推拉着杆,减轻驾驶压力。
这里要注意的是配平毕竟是个辅助的操作,高度速度调节主要还要靠动力和姿态角,不要过度对配平进行操作。
